Система для триангуляционного измерения высоты объектов над поверхностью
Номер патента: U 5689
Опубликовано: 30.10.2009
Авторы: Михаевич Денис Александрович, Ильин Виктор Николаевич, Дубешко Александр Викторович
Текст
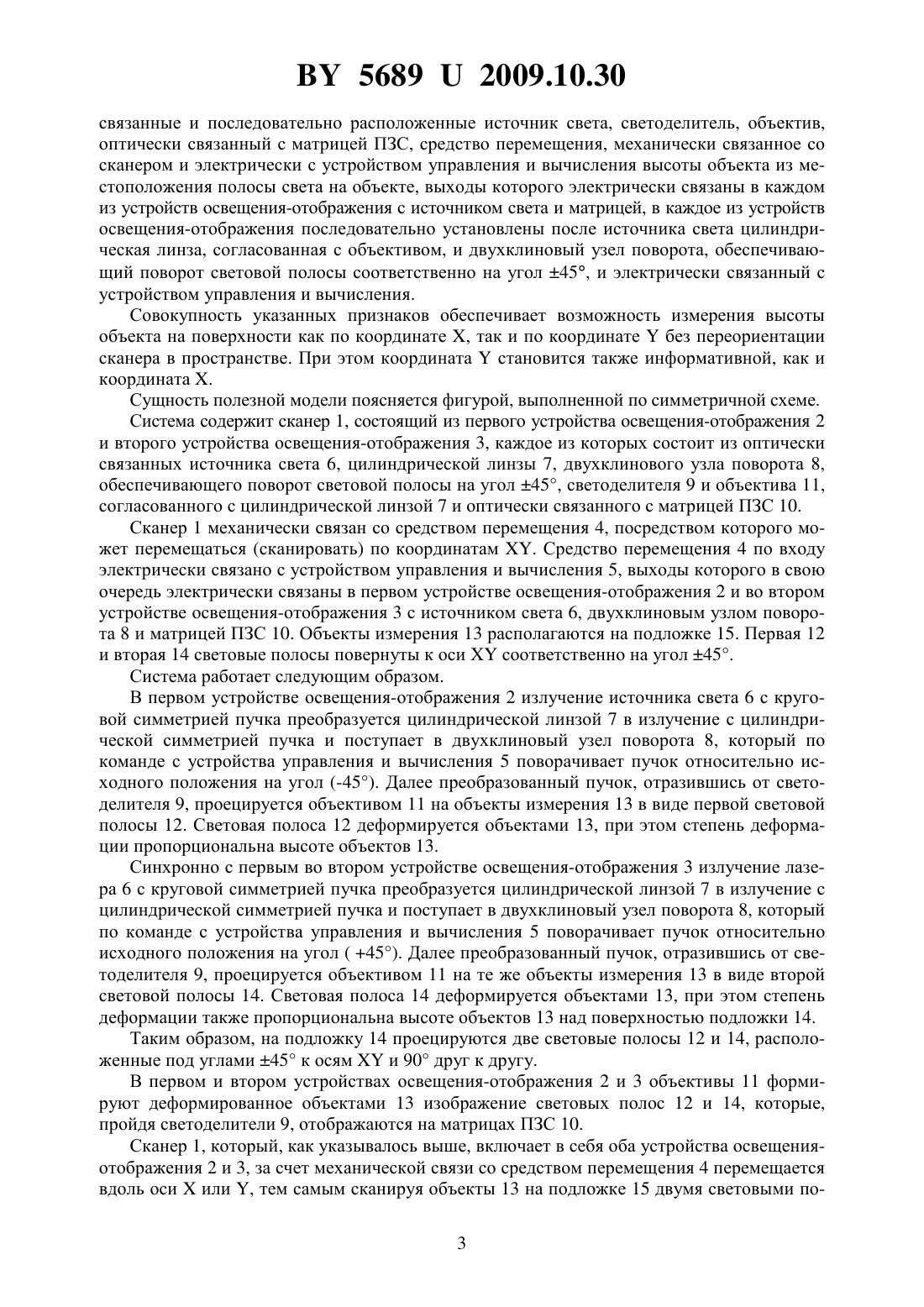
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА ДЛЯ ТРИАНГУЛЯЦИОННОГО ИЗМЕРЕНИЯ ВЫСОТЫ ОБЪЕКТОВ НАД ПОВЕРХНОСТЬЮ(71) Заявитель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(72) Авторы Ильин Виктор Николаевич Дубешко Александр Викторович Михаевич Денис Александрович(73) Патентообладатель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(57) Система для триангуляционного измерения высоты объектов над поверхностью, содержащая подложку с объектами измерения, сканер, включающий два идентичных устройства освещения-отображения, расположенные симметрично относительно вертикальной оси и содержащие оптически связанные и последовательно расположенные источник света, светоделитель, объектив, оптически связанный с матрицей ПЗС, средство перемещения, механически связанное со сканером и электрически с устройством управления и вычисления высоты объекта из местоположения полосы света на объекте, выходы которого электрически связаны в каждом из устройств освещения-отображения с источником света и матрицей, отличающаяся тем, что в каждое из устройств освещения-отображения последовательно установлены после источника света цилиндрическая линза, согласованная с объективом, и двухклиновый узел поворота, обеспечивающий поворот световой полосы соответственно на угол 45 и электрически связанный с устройством управления и вычисления.(56) 1. Патент США 5,028,799 МПК 701 21/86,01 11/24 НКИ 250/561, 356/376. 1991. 2. Международная заявка РСТ,2005/104658 3, МПК 701 3/08,01 11/24,11/30, 2005 (прототип). Полезная модель относится к контрольно-измерительной технике и предназначена для измерения высоты объектов относительно базовой поверхности, в частности столбиковых выводов припоя. Известен прибор для трехмерного измерения поверхности объекта с использованием копланарных данных из составных датчиков 1, содержащий первое устройство для направления первого электромагнитного излучения в первом направлении в первой плоскости по первому пути, протянувшемуся в третьем направлении в вышеуказанной первой плоскости и вдоль поверхности объекта, и для улавливания вдоль первой оси первого электромагнитного излучения, отраженного от поверхности объекта, это третье направление перемещается в указанном первом направлении, и второе устройство для направления второго электромагнитного излучения во втором направлении в вышеуказанной первой плоскости по тому же первому пути, протянувшемуся в третьем направлении в вышеуказанной первой плоскости и вдоль поверхности объекта, и для улавливания вдоль второй оси второго электромагнитного излучения, отраженного от поверхности объекта. Каждое устройство содержит источник света (лазер), который испускает острый луч электромагнитного излучения вдоль заданного направления на поверхность объекта, и блок камеры, состоящий из воспроизводящего объектива и детектора (линейной матрицы ПЗС). Кроме того, оба устройства содержат средства для их перемещения по координатам, а угол триангуляции составляет 30. Данный прибор обладает низким быстродействием, ограничивающим его функциональные возможности и точность измерения высоты объекта и профиля поверхности. Быстродействие снижается из-за большого числа сканирований по зигзагообразному пути, причем дважды одного и того же пути. При этом измерительное сканирование осуществляется только по одной оси , тогда как перемещение по осиявляется холостым. Точность измерения снижается из-за того, что перемещение по осиявляется неинформативным, т.е. имеют место участки поверхности объекта, с которых нет данных измерения. Наиболее близким техническим решением является система для триангуляционного измерения высоты объектов над поверхностью 2, содержащая подложку с объектами измерения, сканер, включающий два идентичных устройства освещения-отображения, каждое из указанных устройств содержит оптически связанные и последовательно расположенные источник света, светоделитель и объектив, оптически связанный с матрицей ПЗС,средство перемещения, устройство управления и вычисления высоты объекта из местоположения полосы света на объекте, электрически связанное с источниками света, матрицами ПЗС и сканером. Данная система также обладает низким быстродействием и не обеспечивает получение измерительной информации по другим координатам, отличным от . Техническая задача, которую позволяет решить предлагаемая полезная модель, - расширение функциональных возможностей системы с одновременным повышением точности измерения высоты объекта. Поставленная техническая задача достигается тем, что в систему для триангуляционного измерения высоты объектов над поверхностью, содержащую подложку с объектами измерения, сканер, включающий два идентичных устройства освещения-отображения,расположенные симметрично относительно вертикальной оси и содержащие оптически 2 56892009.10.30 связанные и последовательно расположенные источник света, светоделитель, объектив,оптически связанный с матрицей ПЗС, средство перемещения, механически связанное со сканером и электрически с устройством управления и вычисления высоты объекта из местоположения полосы света на объекте, выходы которого электрически связаны в каждом из устройств освещения-отображения с источником света и матрицей, в каждое из устройств освещения-отображения последовательно установлены после источника света цилиндрическая линза, согласованная с объективом, и двухклиновый узел поворота, обеспечивающий поворот световой полосы соответственно на угол 45, и электрически связанный с устройством управления и вычисления. Совокупность указанных признаков обеспечивает возможность измерения высоты объекта на поверхности как по координате , так и по координатебез переориентации сканера в пространстве. При этом координатастановится также информативной, как и координата . Сущность полезной модели поясняется фигурой, выполненной по симметричной схеме. Система содержит сканер 1, состоящий из первого устройства освещения-отображения 2 и второго устройства освещения-отображения 3, каждое из которых состоит из оптически связанных источника света 6, цилиндрической линзы 7, двухклинового узла поворота 8,обеспечивающего поворот световой полосы на угол 45, светоделителя 9 и объектива 11,согласованного с цилиндрической линзой 7 и оптически связанного с матрицей ПЗС 10. Сканер 1 механически связан со средством перемещения 4, посредством которого может перемещаться (сканировать) по координатам . Средство перемещения 4 по входу электрически связано с устройством управления и вычисления 5, выходы которого в свою очередь электрически связаны в первом устройстве освещения-отображения 2 и во втором устройстве освещения-отображения 3 с источником света 6, двухклиновым узлом поворота 8 и матрицей ПЗС 10. Объекты измерения 13 располагаются на подложке 15. Первая 12 и вторая 14 световые полосы повернуты к осисоответственно на угол 45. Система работает следующим образом. В первом устройстве освещения-отображения 2 излучение источника света 6 с круговой симметрией пучка преобразуется цилиндрической линзой 7 в излучение с цилиндрической симметрией пучка и поступает в двухклиновый узел поворота 8, который по команде с устройства управления и вычисления 5 поворачивает пучок относительно исходного положения на угол (-45). Далее преобразованный пучок, отразившись от светоделителя 9, проецируется объективом 11 на объекты измерения 13 в виде первой световой полосы 12. Световая полоса 12 деформируется объектами 13, при этом степень деформации пропорциональна высоте объектов 13. Синхронно с первым во втором устройстве освещения-отображения 3 излучение лазера 6 с круговой симметрией пучка преобразуется цилиндрической линзой 7 в излучение с цилиндрической симметрией пучка и поступает в двухклиновый узел поворота 8, который по команде с устройства управления и вычисления 5 поворачивает пучок относительно исходного положения на угол ( 45). Далее преобразованный пучок, отразившись от светоделителя 9, проецируется объективом 11 на те же объекты измерения 13 в виде второй световой полосы 14. Световая полоса 14 деформируется объектами 13, при этом степень деформации также пропорциональна высоте объектов 13 над поверхностью подложки 14. Таким образом, на подложку 14 проецируются две световые полосы 12 и 14, расположенные под углами 45 к осями 90 друг к другу. В первом и втором устройствах освещения-отображения 2 и 3 объективы 11 формируют деформированное объектами 13 изображение световых полос 12 и 14, которые,пройдя светоделители 9, отображаются на матрицах ПЗС 10. Сканер 1, который, как указывалось выше, включает в себя оба устройства освещенияотображения 2 и 3, за счет механической связи со средством перемещения 4 перемещается вдоль осиили , тем самым сканируя объекты 13 на подложке 15 двумя световыми по 3 56892009.10.30 лосами 12 и 14 одновременно. Обе световые полосы 12 и 14 деформируются объектами 13, при этом степень деформации пропорциональна высоте объектов 13 над поверхностью подложки 15. Так как световые полосы 12 и 14 повернуты относительно координат сканирования , по абсолютной величине на 45, то информативными являются обе координаты. Электрические сигналы с матриц ПЗС 10 поступают в устройство управления и вычисления 5 для вычисления высоты объектов 13, расположенных как вдоль координаты ,так и вдоль координаты . При этом данные, полученные при вычислении высоты одного объекта двумя световыми полосами, усредняются. Практическая реализация. Реализация системы осуществлялась по принципиальной оптической схеме, приведенной на фигуре. В качестве источника света 6 использовался полупроводниковый лазер МЛН-3, имеющий длину волны 670 нм, мощностью до 5 мВ. В качестве устройства управления и вычисления применен персональный компьютер(ПК), в качестве матрицы ПЗС выбран элемент фирмы 51300 разрешение 12801024 частота съема 40 МГц возможность выбора интересующего региона съемавозможность съема полного изображения с разрешением 640512. ПК позволяют рассчитать от 100 до 3000 (в режиме ) размеров, что ограничено в основном скоростью матрицы. Передача данных в ПК производится по интерфейсу 100 до 8 МБ/с, на микросхеме фирмы 9000, встроенной в ПК. В программном модуле ПК обработки видеопотока реализованы следующие алгоритмы приведение сканирующего пучка на матрице к равномерному градиентный фильтр, позволяющий обнаружить отклик зондирующего пучка на матрице центр тяжести, используемый для уточнения координаты пучка с субпиксельной точностью, что повышает точность измерений сканера до 0,1 - 0,05 от диапазона преобразование координат пучка на матрице к ,в пространстве табличным методом, полученным в результате калибровки по точечному шаблону для увеличения быстродействия. В качестве средства перемещения применены шаговые двигатели с датчиками линейных перемещений и микроконтроллером фирмы 8051410, реализующим следующие функции управление шаговыми двигателями (двигатель , двигатель ) преобразование сигналов с датчиков линейных перемещений (датчик , датчик ) в абсолютные координаты с погрешностью 0,5 мкм. Таким образом, предложенная система обеспечивает возможность измерения высоты объекта над поверхностью как по координате , так и по координатебез переориентации сканера в пространстве. При этом координатастановится также информативной,как и координата . Кроме того, измерение высоты объектов без переориентации сканера в пространстве или переориентации подложки позволяет исключить ошибки установки и,следовательно, повысить точность измерения. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01B 11/14
Метки: система, измерения, высоты, поверхностью, триангуляционного, объектов
Код ссылки
<a href="https://by.patents.su/4-u5689-sistema-dlya-triangulyacionnogo-izmereniya-vysoty-obektov-nad-poverhnostyu.html" rel="bookmark" title="База патентов Беларуси">Система для триангуляционного измерения высоты объектов над поверхностью</a>
Система измерения температуры нагретых объектов
Номер патента: U 3065
Опубликовано: 30.10.2006
Авторы: Герман Михаил Леонидович, Корнеев Сергей Владимирович, Файн Исаак Вениаминович, Ознобишин Александр Николаевич
МПК: G01J 5/00, G02B 27/00, H04N 5/33...
Метки: система, температуры, объектов, измерения, нагретых
Текст:
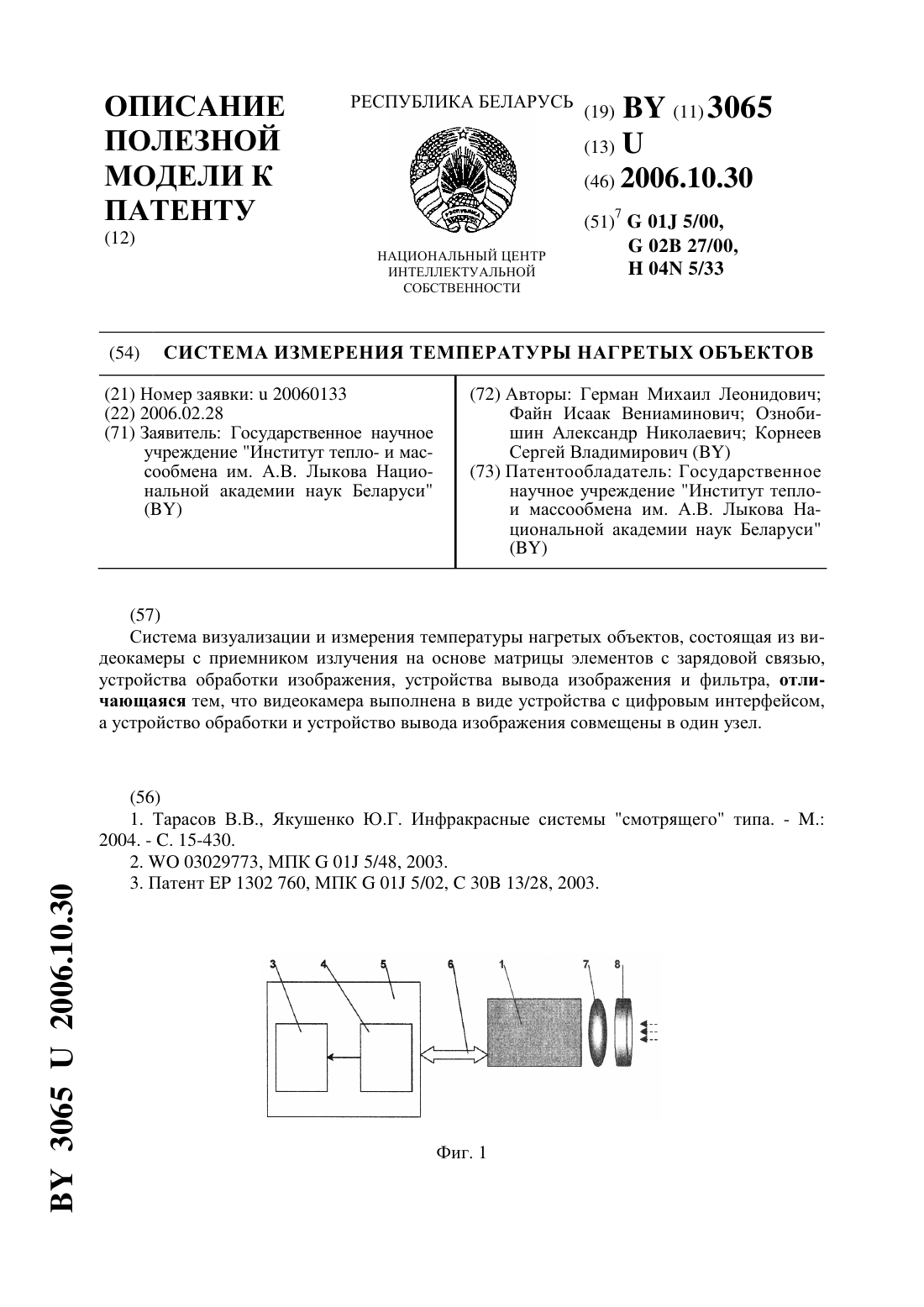
...устройства. Задачей предлагаемой полезной модели является упрощение конструкции системы измерения температур нагретых объектов и обеспечение ее мобильности. Поставленная задача решается за счет того, что в известной системе измерения температуры нагретых объектов, состоящей из видеокамеры с приемником излучения на основе матрицы элементов с зарядовой связью, устройства обработки изображения, устройства вывода изображения и фильтра,...
Устройство для измерения высоты зуба и глубины отпрепарированной его полости Е. Н. Терещенко
Номер патента: U 389
Опубликовано: 30.12.2001
Автор: Терещенко Елена Никодимовна
МПК: A61B 5/00
Метки: измерения, полости, высоты, терещенко, глубины, устройство, отпрепарированной, зуба
Текст:
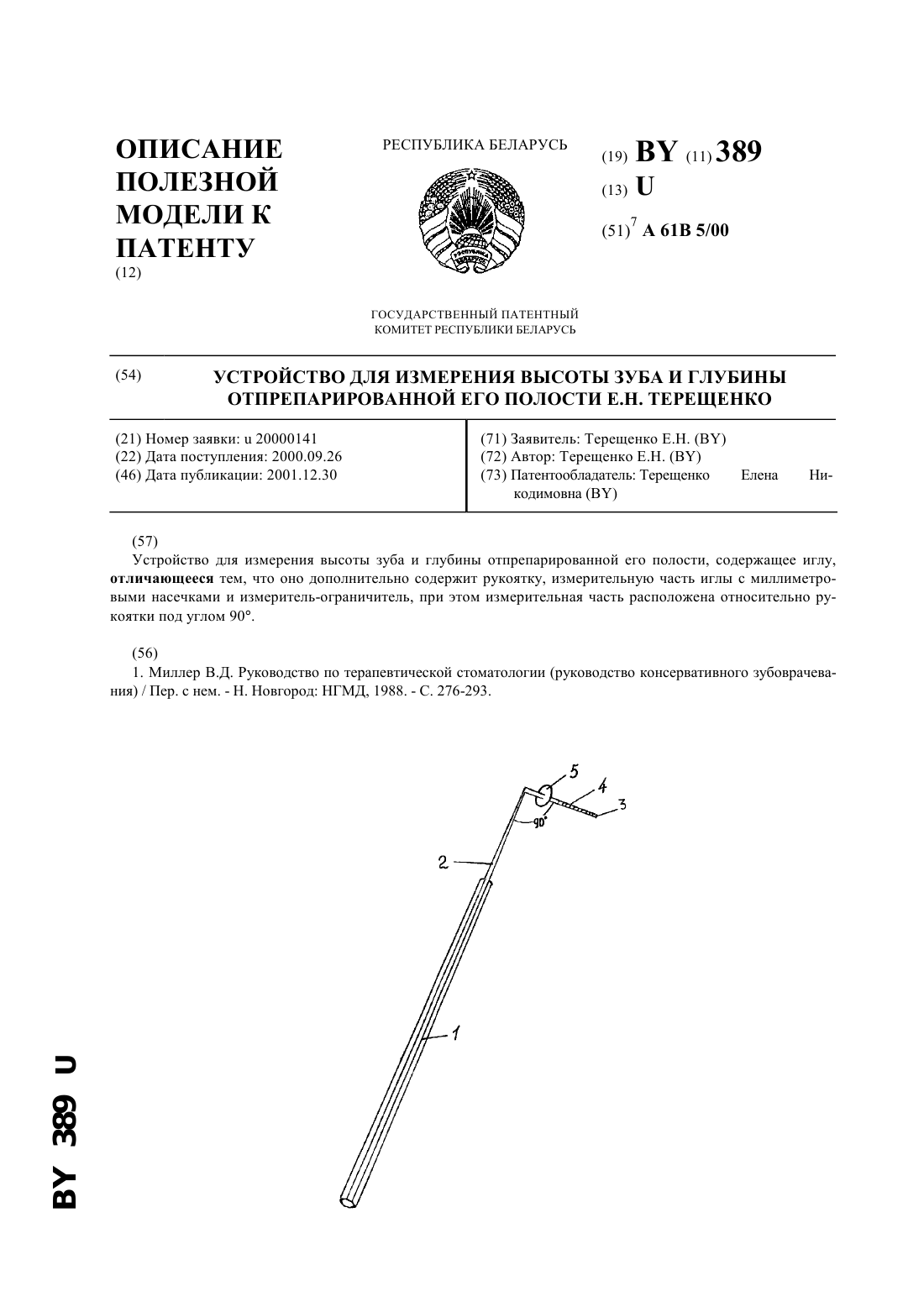
...устройство содержит рукоятку, конец иглы затуплен, при этом измерительная часть иглы развернута относительно рукоятки на 90 градусов, сама измерительная часть содержит миллиметровые насечки, вдоль которых ходит измеритель-ограничитель. Устройство поясняется фигурой, на которой изображен внешний общий вид заявляемого устройства. Фигура содержит рукоятку 1, иглу 2, измерительную часть иглы 3, насечки 4 и измеритель-ограничитель 5, например...
Устройство измерения высоты полета маловысотного летательного аппарата
Номер патента: U 4652
Опубликовано: 30.08.2008
Авторы: Мокринский Владимир Валерьевич, Воинов Валерий Васильевич
МПК: G01R 29/12
Метки: летательного, полета, маловысотного, высоты, аппарата, устройство, измерения
Текст:
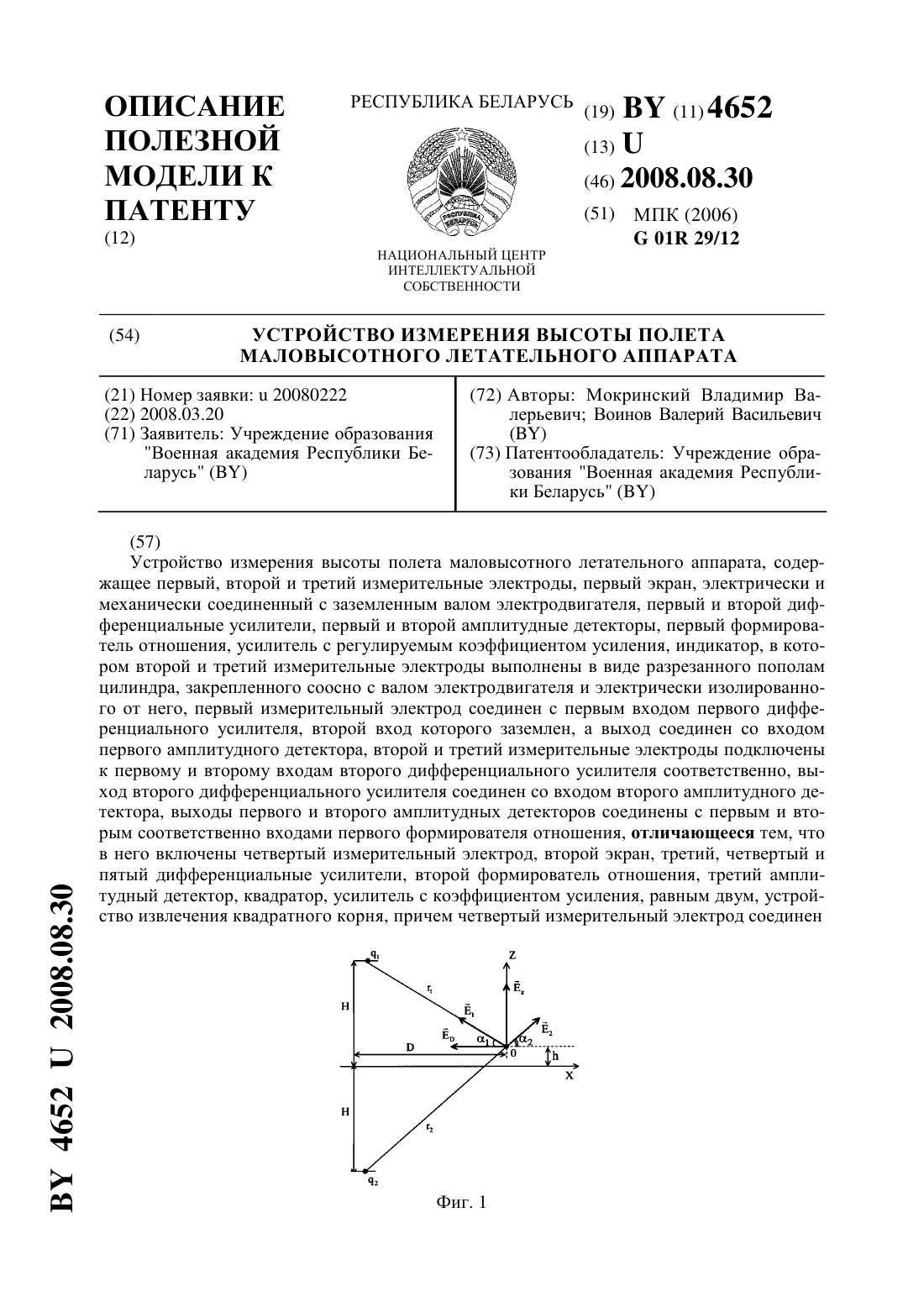
...выход первого формирователя отношения соединен последовательно с квадратором и усилителем с коэффициентом усиления, равным двум, выход которого соединен со вторым входом пятого дифференциального усилителя, первый вход которого соединен с выходом второго формирователя отношения, выход пятого дифференциального усилителя соединен последовательно в порядке перечисления с устройством извлечения квадратного корня, усилителем с регулируемым...
Поляризационный интерферометр для измерения линейных перемещений объектов
Номер патента: 6760
Опубликовано: 30.03.2005
Авторы: Ковалев Анатолий Анатольевич, Кабаев Николай Ильич, Тюшкевич Борис Николаевич
МПК: G01B 9/02, G01B 11/02
Метки: поляризационный, объектов, перемещений, измерения, линейных, интерферометр
Текст:
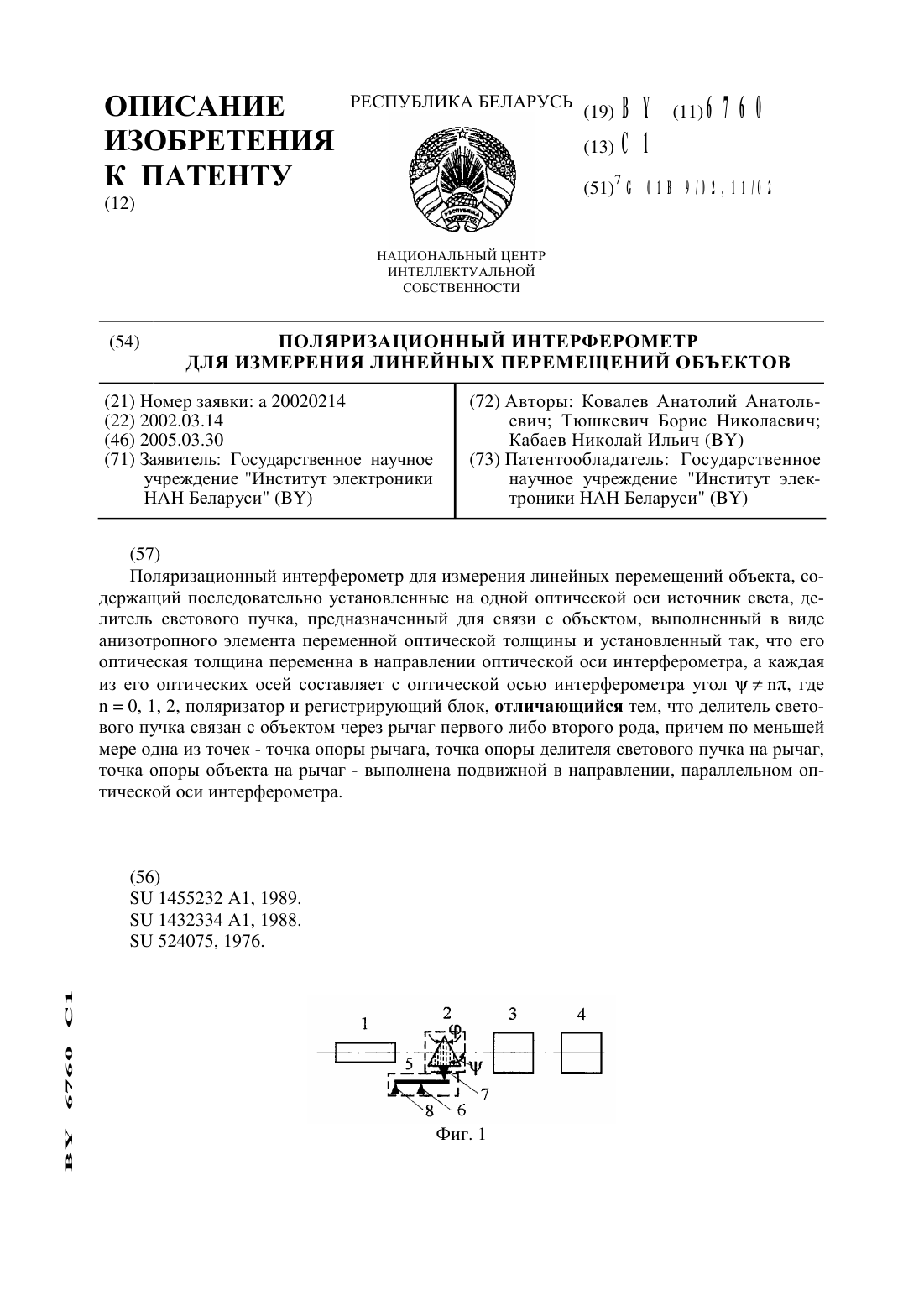
...без замены делителя светового пучка.Сущность изобретения поясняется фиг. 1 и фиг. 2, где приняты следующие обозначения 1 - источник света 2 - делитель светового пучка 3 - поляризатор 4 - регистрирующий блок 5 - рычаг 6 - точка опоры рычага 7 - точка опоры делителя светового пучка на рычаг 8 - точка опоры объекта на рычаг.Интерферометр содержит установленные последовательно на одной оптической оси источник 1 света, делитель 2 светового пучка,...
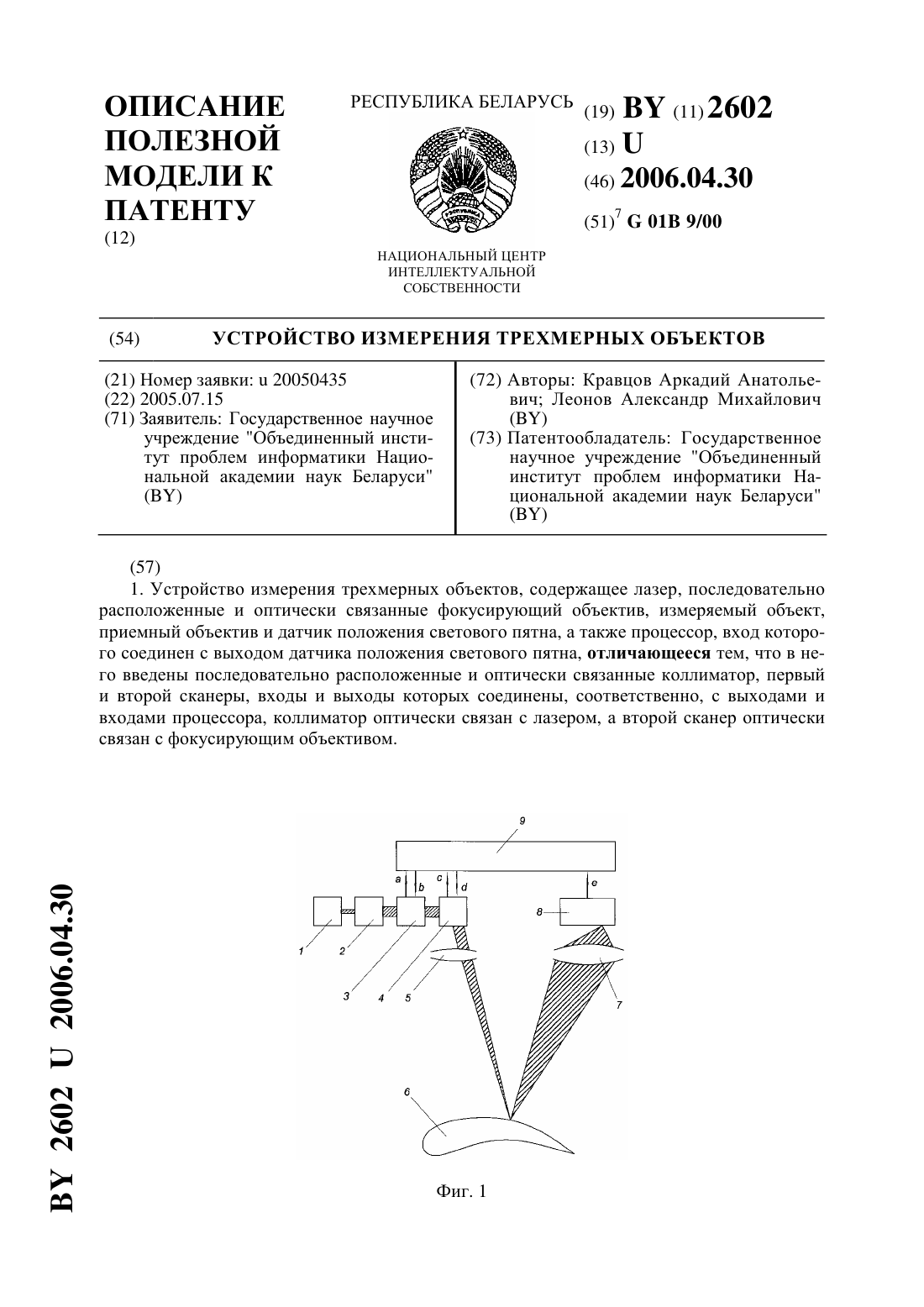
Устройство измерения трехмерных объектов
Номер патента: U 2602
Опубликовано: 30.04.2006
Авторы: Кравцов Аркадий Анатольевич, Леонов Александр Михайлович
МПК: G01B 9/00
Метки: объектов, трехмерных, измерения, устройство
Текст:
...датчика, микрообъектив,объектив и датчик положения светового пятна. Схема предлагаемого устройства изображена на фиг. 1. Схема датчика положения светового пятна изображена на фиг. 2. Схема сканера изображена на фиг. 3. Схема датчика положения зеркала изображена на фиг. 4. Устройство состоит из последовательно установленных и оптически связанных лазера 1, коллиматора 2, первого и второго сканеров 3 и 4, ориентированных перпендикулярно друг...
Предыдущий патент: Устройство для демонтажа ведущих поясков артиллерийских снарядов
Следующий патент: Система для обработки воды
Случайный патент: Тир домашний