Устройство измерения трехмерных объектов
Номер патента: U 2602
Опубликовано: 30.04.2006
Авторы: Кравцов Аркадий Анатольевич, Леонов Александр Михайлович
Текст
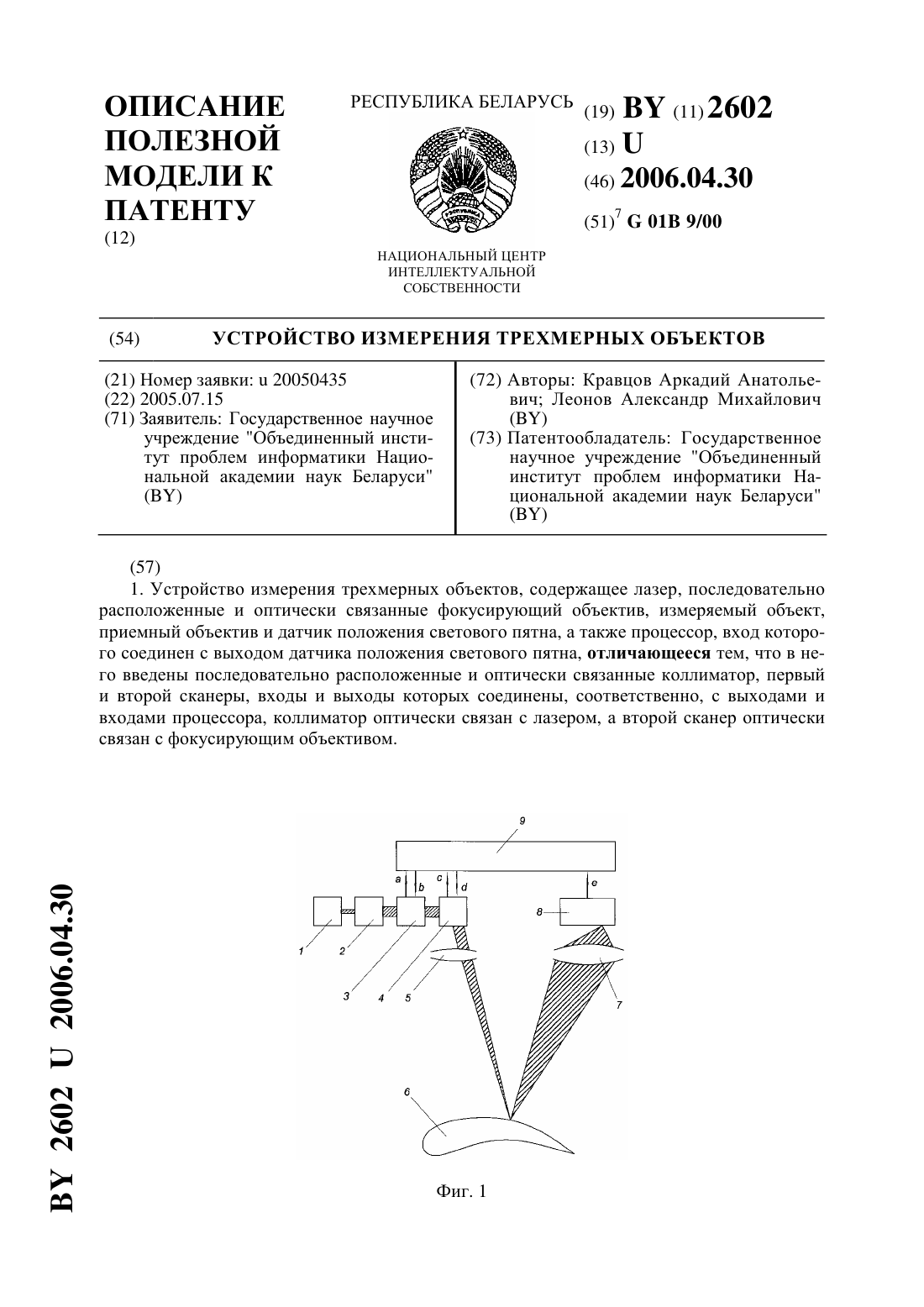
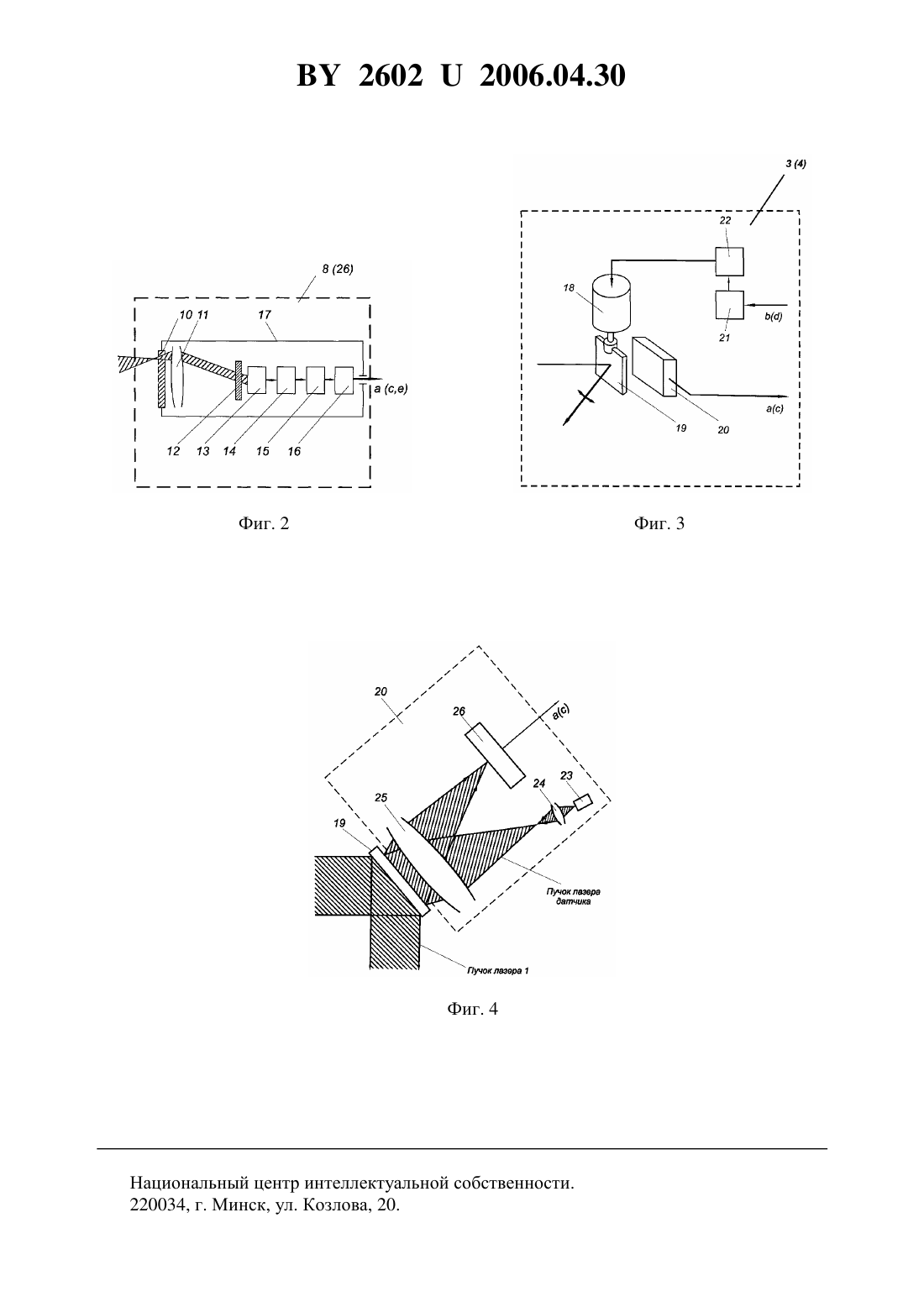
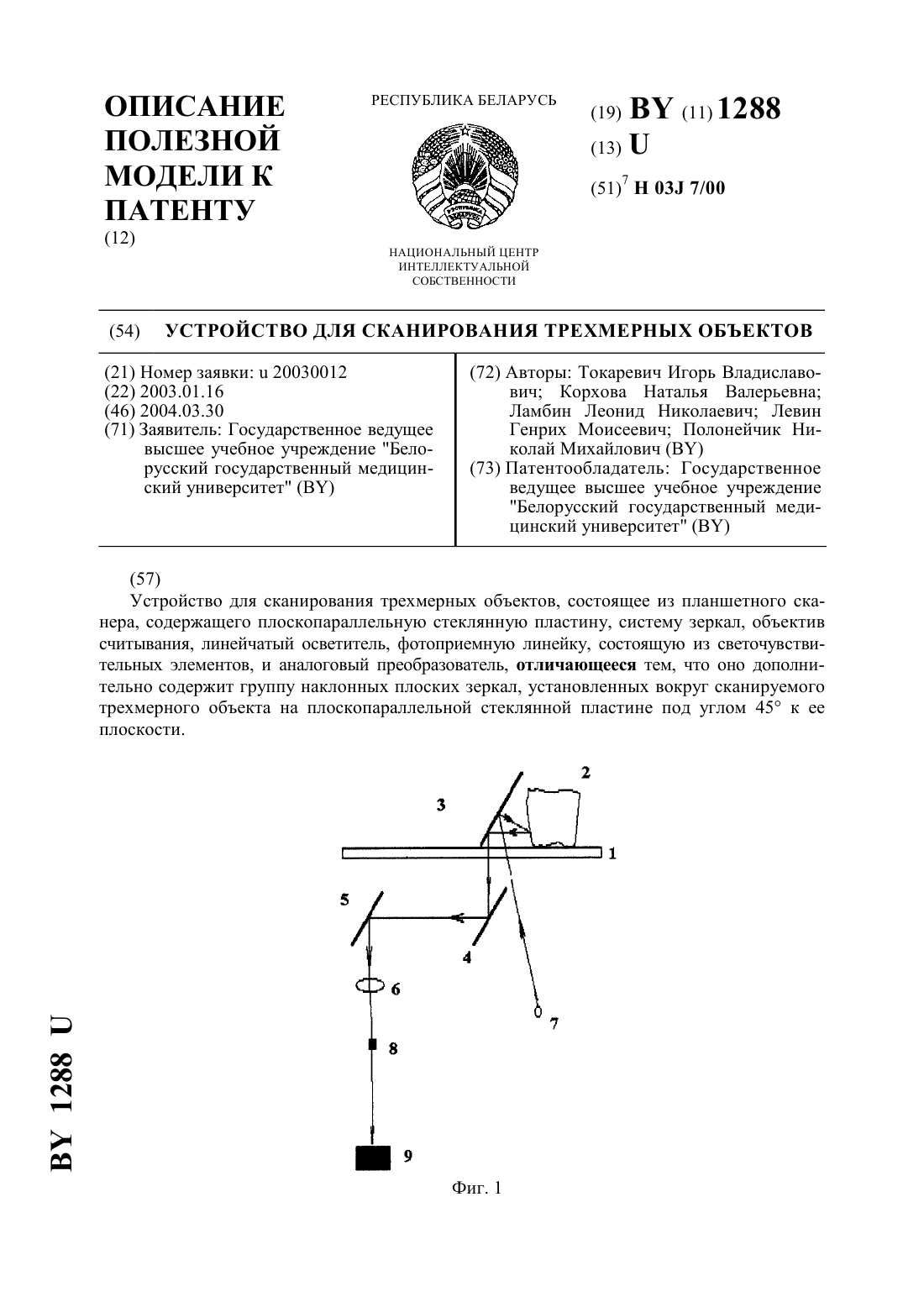
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ(71) Заявитель Государственное научное учреждение Объединенный институт проблем информатики Национальной академии наук Беларуси(72) Авторы Кравцов Аркадий Анатольевич Леонов Александр Михайлович(73) Патентообладатель Государственное научное учреждение Объединенный институт проблем информатики Национальной академии наук Беларуси(57) 1. Устройство измерения трехмерных объектов, содержащее лазер, последовательно расположенные и оптически связанные фокусирующий объектив, измеряемый объект,приемный объектив и датчик положения светового пятна, а также процессор, вход которого соединен с выходом датчика положения светового пятна, отличающееся тем, что в него введены последовательно расположенные и оптически связанные коллиматор, первый и второй сканеры, входы и выходы которых соединены, соответственно, с выходами и входами процессора, коллиматор оптически связан с лазером, а второй сканер оптически связан с фокусирующим объективом. 26022006.04.30 2. Устройство по п. 1, отличающееся тем, что датчик положения светового пятна содержит корпус и установленные в нем оптически связанные между собой линейный растр,конденсор, оптический фильтр и фотоприемник, а также полосовой усилитель, вход которого электрически соединен с выходом фотоприемника, компаратор, вход которого соединен с выходом полосового усилителя, и счетчик импульсов, вход которого электрически соединен с выходом компаратора, а выход - со входом процессора. 3. Устройство по п. 1, отличающееся тем, что сканер содержит электропривод, зеркало, закрепленное на оси электропривода, датчик положения зеркала, оптически связанный с зеркалом, и цифроаналоговый преобразователь, вход которого соединен с процессором,а выход через усилитель мощности - со входом электропривода, причем датчик положения зеркала содержит установленные последовательно и оптически связанные с зеркалом лазер датчика, микрообъектив, объектив и датчик положения светового пятна.(56) 1. Карлов К., Кулиш И. Техническое зрение для учета и контроля качества. - Компания Ин Сие Лтд (//.-./.). 2. Байбаков А.Н., Ладыгин В.И., Пастушенко А.И. и др. Лазерные триангуляционные датчики положения в промышленных системах контроля и диагностики // Автометрия. 2004. - Т. 40. -2. - С. 105-113. 3..,.,.-/ 94., , . 22-291994. Предлагаемое техническое решение относится к измерительной технике, в частности к устройствам для измерения сложной геометрической формы, и может найти применение в машиностроении литые детали, корпуса, лопатки турбин, штампы, пресс-формы, а также в здравоохранении для оперативного и правильного подбора одежды и обуви, изготовления протезов. Актуальна также задача создания систем трехмерного зрения для промышленных манипуляторов и систем охранной сигнализации. Известны устройства измерения трехмерных объектов, содержащие две -камеры,направленные на измеряемый объект и соединенные с процессором, который анализирует изображения, полученные камерами, и определяет геометрические параметры объекта. Такие устройства используются, например, для контроля качества конфет 1. Недостаток таких устройств - низкая точность измерений, ограниченная разрешающей способностью -камер и совершенством программы обработки видеоинформации. Основная сложность реализации указанной программы - нахождение общих точек на изображениях стереопары. Наиболее близким по технической сущности к предлагаемому техническому решению(прототипом) является устройство, которое содержит установленные последовательно по ходу лазерного пучка лазер, фокусирующий и приемный объективы, пространственно смещенные друг относительно друга, и датчик положения светового пятна - фотодиодную линейку, установленную в плоскости изображения измеряемого объекта приемным объективом. Кроме того, устройство содержит процессор, вход которого соединен с датчиком положения светового пятна 2. Недостатком этого устройства является невозможность одновременно реализовать предельно высокую точность измерения и предельное быстродействие. Этот недостаток связан с использованием в качестве датчика положения пучка фотодиодной линейки, которая для получения высокой точности должна содержать много диодов, а для получения высокого быстродействия - мало. (Определение положения светового пятна связано со сканированием всей линейки фотоприемников). Задачей предлагаемой полезной модели является одновременное повышение точности и сокращение времени процесса измерения. 2 26022006.04.30 Задача решается за счет того, что в устройство измерения трехмерных объектов, содержащее лазер, последовательно расположенные и оптически связанные фокусирующий объектив, измеряемый объект, приемный объектив и датчик положения светового пятна, а также процессор, входы которого соединены с датчиком положения светового пятна, введены последовательно расположенные и оптически связанные коллиматор, первый и второй сканеры, входы и выходы которых соединены, соответственно, с выходами и входами процессора, коллиматор оптически связан с лазером, второй сканер оптически связан с фокусирующим объективом, а датчик положения светового пятна содержит корпус и установленные в нем оптически связанные линейный растр, конденсор, оптический фильтр,фотоприемник, а также полосовой усилитель, вход которого соединен с выходом фотоприемника, компаратор, вход которого соединен с выходом полосового усилителя, и счетчик импульсов, вход которого соединен с выходом компаратора, а выход - со входом процессора. Сканер состоит из электропривода, зеркала, закрепленного на оси электропривода, датчика положения зеркала, оптически связанного с зеркалом, и цифроаналогового преобразователя, вход которого соединен с процессором, а выход через усилитель мощности - со входом электропривода, причем датчик положения зеркала содержит установленные последовательно и оптически связанные с зеркалом лазер датчика, микрообъектив,объектив и датчик положения светового пятна. Схема предлагаемого устройства изображена на фиг. 1. Схема датчика положения светового пятна изображена на фиг. 2. Схема сканера изображена на фиг. 3. Схема датчика положения зеркала изображена на фиг. 4. Устройство состоит из последовательно установленных и оптически связанных лазера 1, коллиматора 2, первого и второго сканеров 3 и 4, ориентированных перпендикулярно друг другу, фокусирующего объектива 5, измеряемого объекта 6, приемного объектива 7,датчика положения светового пятна 8, а также процессора 9, входы (, а, с) которого соединены с датчиком положения светового пятна 8 и выходами первого и второго сканеров 3 и 4, а выходы (, ) - со входами первого и второго сканеров 3 и 4. Датчик положения светового пятна 8 состоит из установленных последовательно по ходу лазерного пучка и оптически связанных линейного растра 10, конденсора 11, оптического фильтра 12 и фотоприемника 13, а также содержит полосовой усилитель 14, вход которого соединен с выходом фотоприемника 13, компаратор 15, вход которого соединен с выходом полосового усилителя 14, и счетчик импульсов 16, вход которого соединен с выходом компаратора 15, а выход - со входом (е) процессора 9, а также корпус 17, фиксирующий элементы датчика положения светового пятна и защищающий их от оптических и электрических помех. Сканер содержит электропривод 18, зеркало 19, закрепленное на оси электропривода 18, датчик положения зеркала 20, оптически связанный с зеркалом 19, цифроаналоговый преобразователь 21, вход которого соединен с выходом процессора 9, а выход через усилитель мощности 22 - с электроприводом 18. Датчик положения зеркала 20 состоит из установленных последовательно и оптически связанных с зеркалом 19 лазера датчика 23(целесообразно использовать полупроводниковый лазер), микрообъектива 24, объектива 25 и датчика положения светового пятна 26, состав которого аналогичен составу датчика положения светового пятна 8 и описан выше. Устройство работает следующим образом. Излучение лазера 1 расширяется и формируется в параллельный пучок коллиматором 2, проходит сканеры 3 и 4, фокусируется объективом 5 на поверхность измеряемого объекта 6. Далее диффузно отраженное излучение попадает на приемный объектив 7 и фокусируется им в плоскости изображения измеряемого объекта. Сканеры 3 и 4 сканируют лазерный пучок по поверхности измеряемого объекта по растровому закону, что достигается генерацией пилообразных сигналов процессором 9, преобразованием (цифроаналоговыми преобразователями 21), усилением (усилителями 22) и отработкой электроприводами 18. При этом сканер 3 осуществляет строчную развертку с рабочим и обратным ходом. В процессе рабочего хода луч движется равно 3 26022006.04.30 мерно, сканируя всю контролируемую область, а в процессе обратного хода луч выключается и сканер 3 с предельной скоростью возвращается в начало строки. Сканер 4 осуществляет кадровую развертку путем пошагового перемещения луча в моменты обратного хода сканера 3. После завершения кадровой развертки сканер 4 возвращает луч в начало кадра. Положение луча, сканируемого сканерами 3 и 4, определяется датчиками положения зеркал 20, которые работают следующим образом. Излучение лазера датчика 23 фокусируется микрообъективом 24 и преобразуется объективом 25 в параллельный пучок, который отражается зеркалом 19 и фокусируется объективом 25 на датчик положения светового пятна 26. Датчики положения светового пятна 8 и 26 работают следующим образом. Лазерный пучок, сфокусированный на поверхности линейного растра 10, перемещается по нему по пилообразному закону и модулируется по интенсивности. Далее лазерный пучок направляется конденсором 11 через оптический фильтр 12 на фотоприемник 13, который преобразует модулированный по интенсивности свет в соответствующий электрический сигнал. Сигнал с выхода фотоприемника 13 усиливается полосовым усилителем 14 и преобразуется компаратором 15 в прямоугольный сигнал, фронты которого считаются счетчиком импульсов 16. Подсчет импульсов начинается с момента начала рабочего хода движения светового пятна. Сигнал с выхода счетчика, пропорциональный положению этого пятна,подается на вход процессора 8. Определение координат освещенной точки измеряемого объекта производится процессором 9 на базе полученных данных. На первом этапе процессор 9 преобразует поток поступающей информации в таблицу,каждая строка которой представляет группу цифр, полученных в один момент времени и соответствующих одной точке объекта, а число строк соответствует числу измеряемых точек. На втором этапе определения координат процессор 9 производит перерасчет полученных цифр в величины углов и составляет соответствующую таблицу. На третьем этапе путем тригонометрических расчетов углы пересчитываются в координаты точек измеряемого объекта хВ/ (180 - А - В),(1)В/ (180 -- ),(2) уВ/ (180 -- ),(3) где- расстояние между центром фокусирующего объектива и освещенной точкой объекта, - расстояние между центрами фокусирующего и приемного объективов,А, В и С - углы треугольника (углы и стороны на фиг. не показаны из-за сложности рисунка). Соотношения (1-3) получены из теоремы синусов (// В/ С),где- расстояние между освещенной точкой объекта и центром приемного объектива, в предположении, что ось Ох начинается в центре фокусирующего объектива и проходит через центр приемного объектива, а осьнаправлена в сторону измеряемого объекта. Предлагаемая полезная модель позволяет повысить точность производимых измерений и быстродействие. Испытанные образцы датчиков положения светового пятна показали, что эти элементы обеспечивают точность измерения углов порядка 5 микрорадиан(1 угловая секунда) при скорости сканирования 106 элементов в секунду 3. Указанные точности измерения углов позволяют измерять трехмерные объекты с точностью 0,030,05 от диапазона измерений (в 2-3 раза точнее, чем известные аналоги) с быстродействием 106 измерений в секунду (на порядок быстрее, чем аналоги). Указанные достоинства позволяют применить предлагаемую полезную модель для контроля высокоточной серийной продукции, оперативно измеряя положение нескольких миллионов точек, а также геометрические параметры тела человека, который не может длительное время быть неподвижным. 4 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G01B 9/00
Метки: объектов, трехмерных, измерения, устройство
Код ссылки
<a href="https://by.patents.su/5-u2602-ustrojjstvo-izmereniya-trehmernyh-obektov.html" rel="bookmark" title="База патентов Беларуси">Устройство измерения трехмерных объектов</a>
Устройство для сканирования трехмерных объектов
Номер патента: U 1288
Опубликовано: 30.03.2004
Авторы: Ламбин Леонид Николаевич, Левин Генрих Моисеевич, Полонейчик Николай Михайлович, Корхова Наталья Валерьевна, Токаревич Игорь Владиславович
МПК: H03J 7/00
Метки: сканирования, устройство, трехмерных, объектов
Текст:
...направленного на них света. Свет, отраженный от сканируемого документа, этой оптической системой фокусируется на фотоприемной линейке. Снятый с каждого ее элемента электрический сигнал оцифровывается с помощью аналогового преобразователя и передается в компьютер 2. Планшетный сканер использован в качестве прототипа предлагаемого устройства. В его состав входят плоскопараллельная стеклянная пластина, с одной стороны которой находится...
Поляризационный интерферометр для измерения линейных перемещений объектов
Номер патента: 6760
Опубликовано: 30.03.2005
Авторы: Кабаев Николай Ильич, Ковалев Анатолий Анатольевич, Тюшкевич Борис Николаевич
МПК: G01B 9/02, G01B 11/02
Метки: измерения, перемещений, поляризационный, объектов, линейных, интерферометр
Текст:
...без замены делителя светового пучка.Сущность изобретения поясняется фиг. 1 и фиг. 2, где приняты следующие обозначения 1 - источник света 2 - делитель светового пучка 3 - поляризатор 4 - регистрирующий блок 5 - рычаг 6 - точка опоры рычага 7 - точка опоры делителя светового пучка на рычаг 8 - точка опоры объекта на рычаг.Интерферометр содержит установленные последовательно на одной оптической оси источник 1 света, делитель 2 светового пучка,...
Устройство для бесконтактного измерения температуры
Номер патента: 3134
Опубликовано: 30.12.1999
Авторы: Козлов Владимир Леонидович, Чубаров Сергей Ильич
МПК: G01J 5/22
Метки: бесконтактного, измерения, устройство, температуры
Текст:
...синхроимпульсы,совпадающие по фазе с информационным сигналом с приемника 1. Усилитель-формирователь 10 формирует стандартные импульсы для управления синхродетектором 4 (фиг. 2 а) с частотой, равной частоте модуляции оптического излучения. На выходе приемника излучения 1 будет сформирован сигнал, пропорциональный разности мощностей теплового излучения от измеряемого объекта и обтюратора (фиг. 26). 4 4( 4(1)Ф),где А - коэффициент...
Акустическое устройство измерения расстояния до объекта
Номер патента: 4774
Опубликовано: 30.12.2002
Авторы: Шахлевич Григорий Михайлович, Боженков Владимир Владимирович, Осипов Анатолий Николаевич, Достанко Анатолий Павлович
МПК: G01S 15/08
Метки: расстояния, устройство, объекта, измерения, акустическое
Текст:
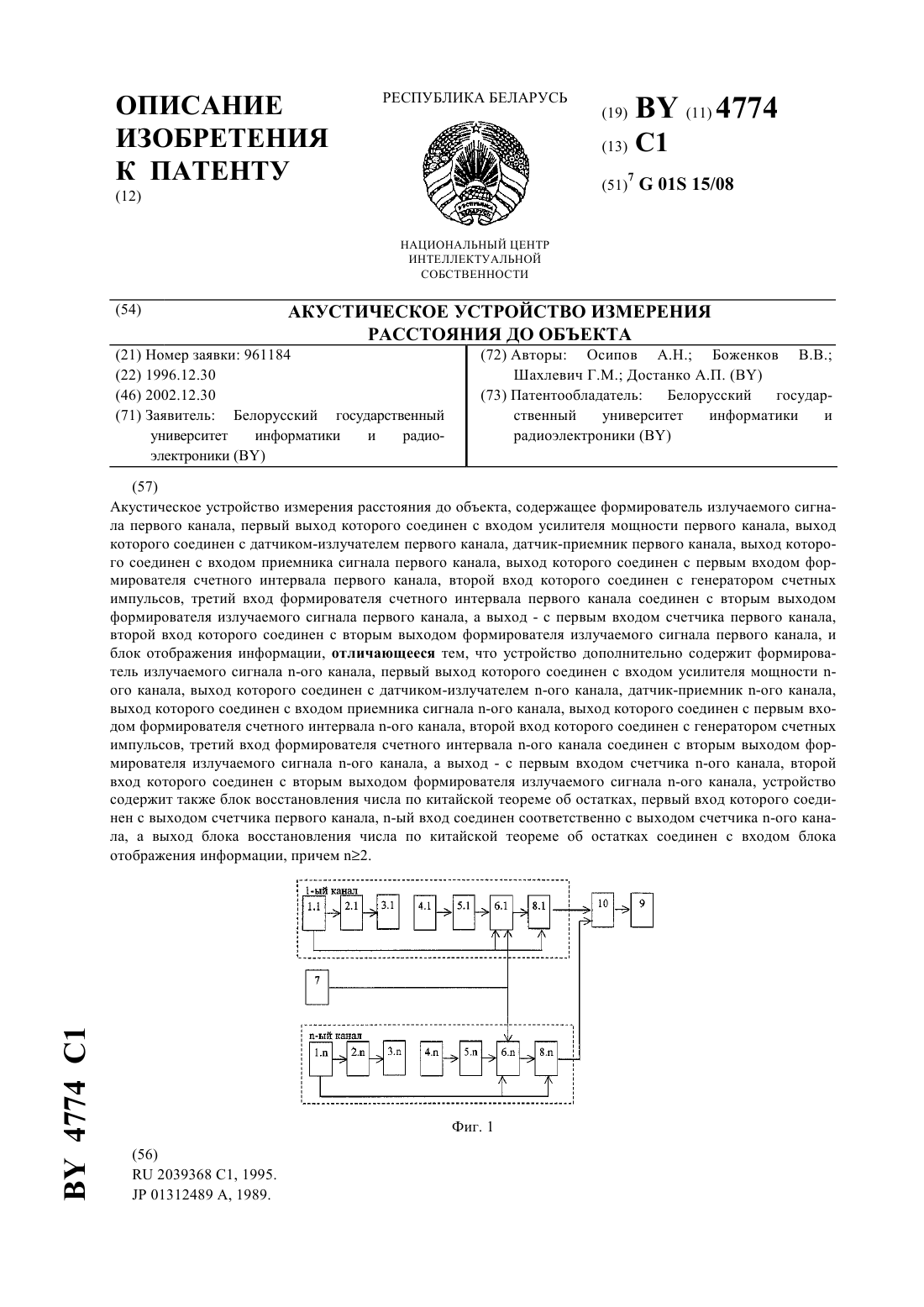
...Объект зондируетсясигналами, характеризующимися различными периодами следования сигнала, и определение расстояния до объекта производится порезультатам измерений в соответствии с китайской теоремой об остатках. Это позволяет измерять расстояние до объекта зондирующими сигналами с малой скважностью. На фиг. 1 приведена структурная схема устройства. На фиг. 2 и фиг. 3 приведены структурные схемы соответственно формирователя излучаемого...
Устройство для измерения влажности веществ
Номер патента: 6709
Опубликовано: 30.12.2004
Авторы: Пожиток Игорь Константинович, Годлевская Светлана Владимировна, Молочников Виктор Викторович, Волынец Генрих Иванович
МПК: G01N 27/22
Метки: устройство, влажности, веществ, измерения
Текст:
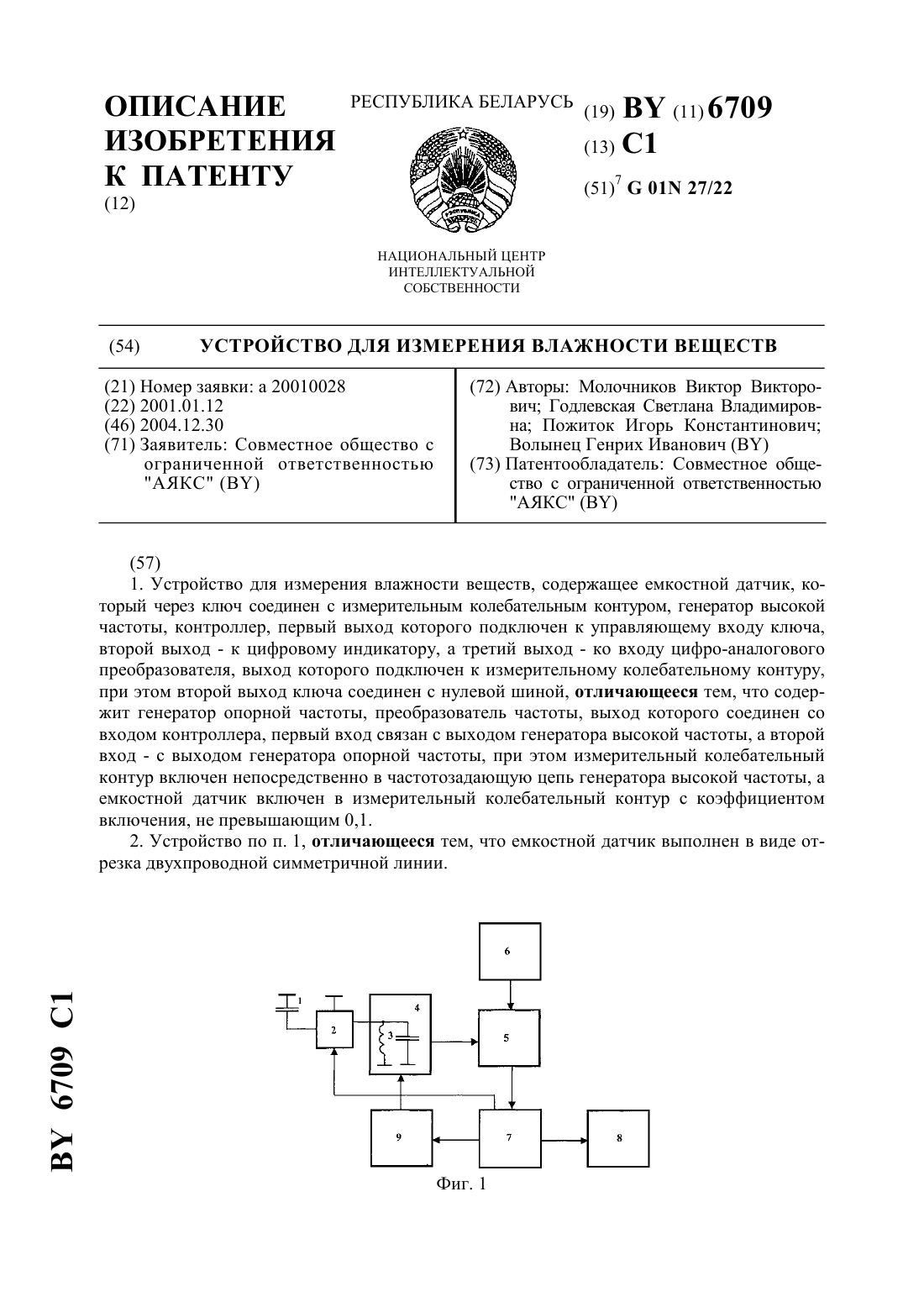
...в виде коаксиального конденсатора, и устройство дополнительно содержит трансформатор сопротивления, выполненный в виде длинной линии (высочастотный коаксиальный кабель), длина которой равна/4, где- длина распространения электромагнитной волны в длинной линии на частоте генератора высокой частоты,1, 3, 5 Сущность изобретения заключается в том, что емкостной датчик с исследуемым материалом включен в колебательный контур с коэффициентом...
Предыдущий патент: Устройство для тренировки армрестлеров
Следующий патент: Установка термической очистки капролактама
Случайный патент: Инструмент для постановки пористых имплантатов позвонка, изготовленных из порошка титана