Система посадки беспилотного летательного аппарата
Номер патента: U 10666
Опубликовано: 30.06.2015
Авторы: Пляц Олег Михайлович, Синяков Анатолий Леонидович, Синявская Светлана Владимировна, Анисимов Вячеслав Михайлович, Синявский Василий Михайлович
Формула / Реферат
Система посадки беспилотного летательного аппарата, содержащая установленные в зоне посадки беспилотного летательного аппарата захватывающее устройство и передающую сигналы корректирующих команд наземную передающую радиостанцию, а также содержащая располСистема посадки беспилотного летательного аппарата, содержащая установленные в зоне посадки беспилотного летательного аппарата захватывающее устройство и передающую сигналы корректирующих команд наземную передающую радиостанцию, а также содержащая расположенные на беспилотном летательном аппарате бортовые передающую радиостанцию и принимающую сигналы корректирующих команд приемную радиостанцию с подключенными исполнительными механизмами органов управления беспилотного летательного аппарата, отличающаяся тем, что снабжена автоматическим радиокомпасом, вычислительным устройством и двумя автоматическими радиопеленгаторами, установленными за захватывающим устройством на заданном расстоянии друг от друга, образующим базу, в центре которой установлен автоматический радиокомпас, при этом выходы двух автоматических радиопеленгаторов и радиокомпаса присоединены ко входам вычислительного устройства, к выходу которого подключена входом передающая сигналы корректирующих команд вычислительного устройства наземная передающая радиостанция.
Текст
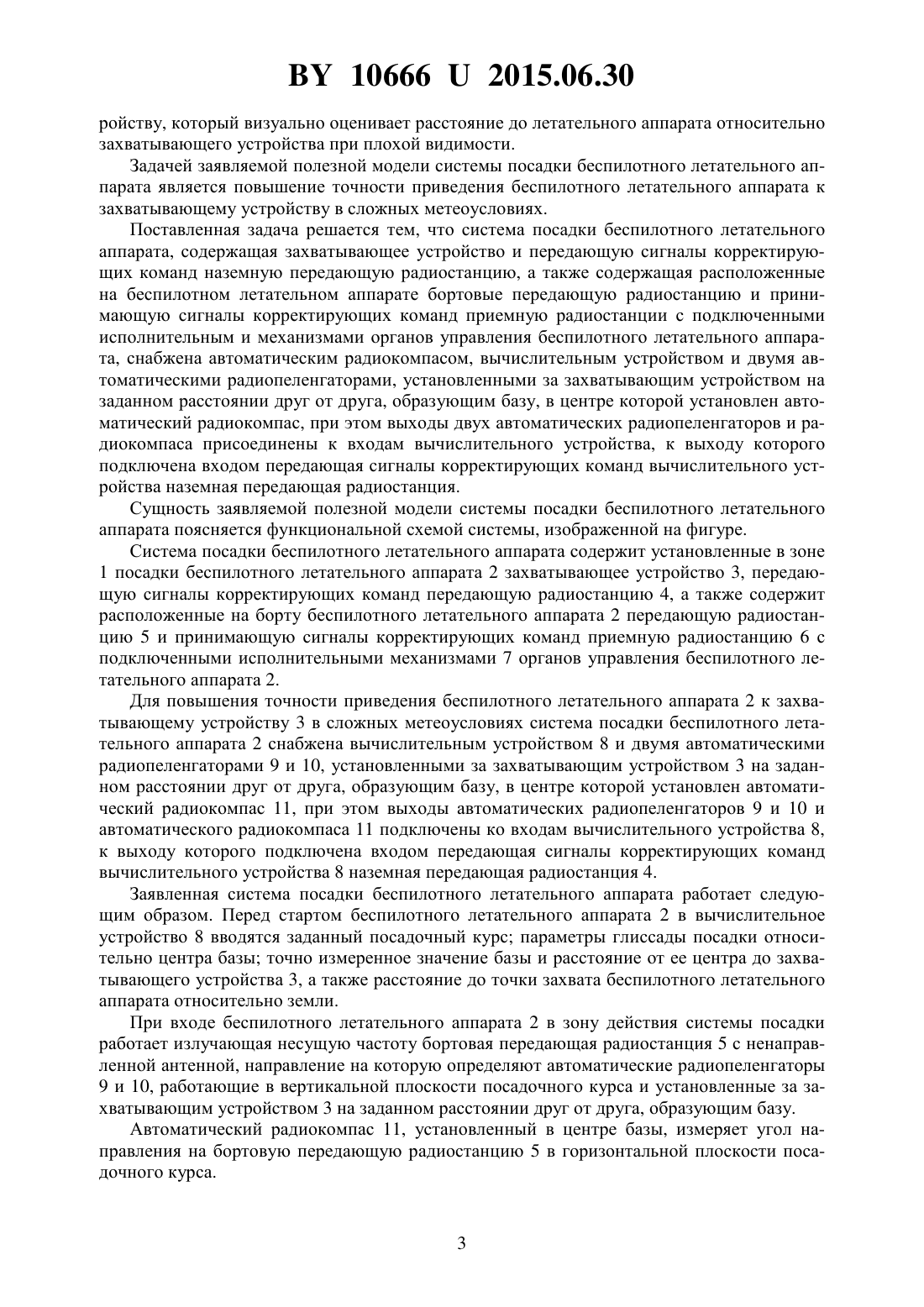
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА(71) Заявители Анисимов Вячеслав Михайлович Пляц Олег Михайлович Синявская Светлана Владимировна Синявский Василий Михайлович Синяков Анатолий Леонидович(72) Авторы Анисимов Вячеслав Михайлович Пляц Олег Михайлович Синявская Светлана Владимировна Синявский Василий Михайлович Синяков Анатолий Леонидович(73) Патентообладатели Анисимов Вячеслав Михайлович Пляц Олег Михайлович Синявская Светлана Владимировна Синявский Василий Михайлович Синяков Анатолий Леонидович(57) Система посадки беспилотного летательного аппарата, содержащая установленные в зоне посадки беспилотного летательного аппарата захватывающее устройство и передающую сигналы корректирующих команд наземную передающую радиостанцию, а также содержащая расположенные на беспилотном летательном аппарате бортовые передающую радиостанцию и принимающую сигналы корректирующих команд приемную радиостанцию с подключенными исполнительными механизмами органов управления беспилотного летательного аппарата, отличающаяся тем, что снабжена автоматическим радиокомпасом, вычислительным устройством и двумя автоматическими радиопеленгаторами, установленными за захватывающим устройством на заданном расстоянии друг от друга, образующим базу, в центре которой установлен автоматический радиокомпас, при этом выходы двух автоматических радиопеленгаторов и радиокомпаса присоединены ко входам вычислительного устройства, к выходу которого подключена входом передающая сигналы корректирующих команд вычислительного устройства наземная передающая радиостанция.(56) 1. Ларионова Д.Г. Устройство для посадки БПЛА самолетного типа на судно малого водоизмещения // Судостроение. - 2006. -4. - С. 45-46. 2. Дремлюга Г.П. и др. Беспилотные летательные аппараты. Состояние и развитие / Под. ред. Ю.Л.Иванова. - М. ЛА Варяг, 2004. - С. 69. 3. Ларионова Д.Г. Сравнительный анализ способов и устройств посадки БПЛА на палубу неавианесущего судна. - С-Пб. Балт. гос.техн. университет, 2003. - С. 47-50. Предлагаемое техническое решение относится к системам посадки беспилотных летательных аппаратов в сложных метеоусловиях. Известна система посадки беспилотного летательного аппарата на борт судна 1, 2. Известная система содержит крыло-парашют, которым оборудован беспилотный летательный аппарат, и находящееся на борту судна подхватывающее устройство, выполненное в виде штанги, прикрепленной к длинному шесту. Эта система посадки беспилотного летательного аппарата работает следующим образом. Парашют раскрывается на конечном участке подлета беспилотного летательного аппарата к заданной точке и обеспечивает снижение скорости беспилотного летательного аппарата до 18-35 км/ч, что позволяет оператору подхватить парашют штангой и тем самым предотвратить повреждение аппарата от удара об палубу судна и падения в воду. Недостатком этой системы посадки является невозможность повторения маневра посадки аппарата при пролете парашюта мимо штанги. Ближайшей по конструкции к заявляемой системе посадки беспилотного летательного аппарата является система, содержащая расположенные на палубе судна захватывающее устройство, глиссадный и курсовой маяки, а также приемную и передающую радиостанции, к выходу и входу которых соответственно присоединены монитор и устройство выдачи корректирующих команд, а также размещенные на борту беспилотного летательного аппарата передающую и принимающую радиостанции, ко входу и к выходу которых соответственно присоединены телекамера и исполнительные механические устройства рулей летательного аппарата 3. Эта система посадки беспилотного летательного аппарата работает следующим образом. Контроль за процессом посадки производится оператором при визуальном наблюдении беспилотного летательного аппарата на этапе его подхода к судну. По телевизионному изображению на мониторе маяков, передаваемому с борта беспилотного летательного аппарата при помощи телекамеры и бортовой передающей радиостанции, и визуальному наблюдению беспилотного летательного аппарата оператор определяет положение летательного аппарата относительно глиссадного и курсового маяков и вносит при помощи устройства выдачи корректирующих команд, палубной передающей радиостанции, бортовой приемной радиостанции и исполнительных механических устройств рулей летательного аппарата коррекцию в его пространственное положение относительно захватывающего устройства. К недостатку этой известной системы посадки беспилотного летательного аппарата следует отнести низкую точность приведения беспилотного летательного аппарата к захватывающему устройству. Низкая точность приведения беспилотного летательного аппарата оператором к захватывающему устройству обусловлена некачественным телевизионным изображением маяков на экране монитора из-за образования на объективе телекамеры, установленной на беспилотном летательном аппарате, водяной, снежной или ледяной пленок при полете беспилотного летательного аппарата в сложных метеоусловиях, а также участием оператора в процессе выведения беспилотного летательного аппарата к захватывающему уст 2 106662015.06.30 ройству, который визуально оценивает расстояние до летательного аппарата относительно захватывающего устройства при плохой видимости. Задачей заявляемой полезной модели системы посадки беспилотного летательного аппарата является повышение точности приведения беспилотного летательного аппарата к захватывающему устройству в сложных метеоусловиях. Поставленная задача решается тем, что система посадки беспилотного летательного аппарата, содержащая захватывающее устройство и передающую сигналы корректирующих команд наземную передающую радиостанцию, а также содержащая расположенные на беспилотном летательном аппарате бортовые передающую радиостанцию и принимающую сигналы корректирующих команд приемную радиостанции с подключенными исполнительным и механизмами органов управления беспилотного летательного аппарата, снабжена автоматическим радиокомпасом, вычислительным устройством и двумя автоматическими радиопеленгаторами, установленными за захватывающим устройством на заданном расстоянии друг от друга, образующим базу, в центре которой установлен автоматический радиокомпас, при этом выходы двух автоматических радиопеленгаторов и радиокомпаса присоединены к входам вычислительного устройства, к выходу которого подключена входом передающая сигналы корректирующих команд вычислительного устройства наземная передающая радиостанция. Сущность заявляемой полезной модели системы посадки беспилотного летательного аппарата поясняется функциональной схемой системы, изображенной на фигуре. Система посадки беспилотного летательного аппарата содержит установленные в зоне 1 посадки беспилотного летательного аппарата 2 захватывающее устройство 3, передающую сигналы корректирующих команд передающую радиостанцию 4, а также содержит расположенные на борту беспилотного летательного аппарата 2 передающую радиостанцию 5 и принимающую сигналы корректирующих команд приемную радиостанцию 6 с подключенными исполнительными механизмами 7 органов управления беспилотного летательного аппарата 2. Для повышения точности приведения беспилотного летательного аппарата 2 к захватывающему устройству 3 в сложных метеоусловиях система посадки беспилотного летательного аппарата 2 снабжена вычислительным устройством 8 и двумя автоматическими радиопеленгаторами 9 и 10, установленными за захватывающим устройством 3 на заданном расстоянии друг от друга, образующим базу, в центре которой установлен автоматический радиокомпас 11, при этом выходы автоматических радиопеленгаторов 9 и 10 и автоматического радиокомпаса 11 подключены ко входам вычислительного устройства 8,к выходу которого подключена входом передающая сигналы корректирующих команд вычислительного устройства 8 наземная передающая радиостанция 4. Заявленная система посадки беспилотного летательного аппарата работает следующим образом. Перед стартом беспилотного летательного аппарата 2 в вычислительное устройство 8 вводятся заданный посадочный курс параметры глиссады посадки относительно центра базы точно измеренное значение базы и расстояние от ее центра до захватывающего устройства 3, а также расстояние до точки захвата беспилотного летательного аппарата относительно земли. При входе беспилотного летательного аппарата 2 в зону действия системы посадки работает излучающая несущую частоту бортовая передающая радиостанция 5 с ненаправленной антенной, направление на которую определяют автоматические радиопеленгаторы 9 и 10, работающие в вертикальной плоскости посадочного курса и установленные за захватывающим устройством 3 на заданном расстоянии друг от друга, образующим базу. Автоматический радиокомпас 11, установленный в центре базы, измеряет угол направления на бортовую передающую радиостанцию 5 в горизонтальной плоскости посадочного курса. 106662015.06.30 Выходные сигналы автоматических радиопеленгаторов 9 и 10, а также автоматического радиокомпаса 11, соответствующие углам направления на бортовую передающую радиостанцию 5 в вертикальной и горизонтальной плоскостях посадочного курса, подаются на соответствующие входы вычислительного устройства 8, которое рассчитывает текущие координаты беспилотного летательного аппарата 2 Т и Т в вертикальной и Т в горизонтальной плоскостях посадочного курса по формуламТ, где Т - расстояние беспилотного летательного аппарата 2 до центра базы Т - высота полета беспилотного летательного аппарата 2 относительно поверхности земли Т - расстояние отклонения беспилотного летательного аппарата 2 от горизонтальной оси ,совмещенной с базой системы 2 - длина базыи- углы направления на беспилотный летательный аппарат 2, измеренные автоматическими радиопеленгаторами 9 и 10 соответственно в вертикальной плоскости посадочного курса- угол направления на беспилотный летательный аппарат 2, измеренный автоматическим радиокомпасом 11 в горизонтальной плоскости посадочного курса. После этого вычислительное устройство 8 рассчитывает отклонения , ,беспилотного летательного аппарата 2 от 3, 3, 3 заданных полетным заданием 3 - Т 3 - Т 3 - Т. Затем вычислительное устройство 8 в соответствии с величинами отклонений , , вырабатывает сигналы корректирующих команд. Сигналы корректирующих команд с выхода вычислительного устройства 8 подаются на вход наземной передающей радиостанции 4 и передаются ею на борт беспилотного летательного аппарата 2. Принимающая сигналы корректирующих команд вычислительного устройства 8 бортовая приемная радиостанция 6 своими выходными сигналами воздействует на исполнительные механизмы 7 органов управления беспилотного летательного аппарата 2, которые принимают такие положения, при которых компенсируются отклонения, , . В этом случае беспилотный летательный аппарат 2 направляется в центр захватывающего устройства 3. Таким образом, в процессе эксплуатации заявляемой системы посадки беспилотного летательного аппарата происходит достижение поставленной технической задачи - повышение точности приведения беспилотного летательного аппарата к захватывающему устройству в сложных метеоусловиях за счет оборудования системы автоматическим радиокомпасом,работающим в горизонтальной плоскости посадочного курса, вычислительным устройством и двумя автоматическими радиопеленгаторами, работающими в вертикальной плоскости посадочного курса, установленными за захватывающим устройством на заданном расстоянии друг от друга, образующим базу, в центре которой установлен автоматический радиокомпас, при этом выходы двух автоматических радиопеленгаторов и радиокомпаса присоединены ко входам вычислительного устройства, к выходу которого подключена входом передающая сигналы корректирующих команд вычислительного устройства наземная передающая радиостанция. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B64C 25/32, B64F 1/18
Метки: летательного, посадки, беспилотного, система, аппарата
Код ссылки
<a href="https://by.patents.su/4-u10666-sistema-posadki-bespilotnogo-letatelnogo-apparata.html" rel="bookmark" title="База патентов Беларуси">Система посадки беспилотного летательного аппарата</a>
Система ручного управления посадкой беспилотного летательного аппарата
Номер патента: U 10590
Опубликовано: 28.02.2015
Авторы: Синяков Анатолий Леонидович, Чигарев Анатолий Власович, Синявский Василий Михайлович, Капустин Александр Григорьевич
МПК: B64F 1/18, B64C 25/32
Метки: управления, летательного, беспилотного, система, посадкой, ручного, аппарата
Формула / Реферат:
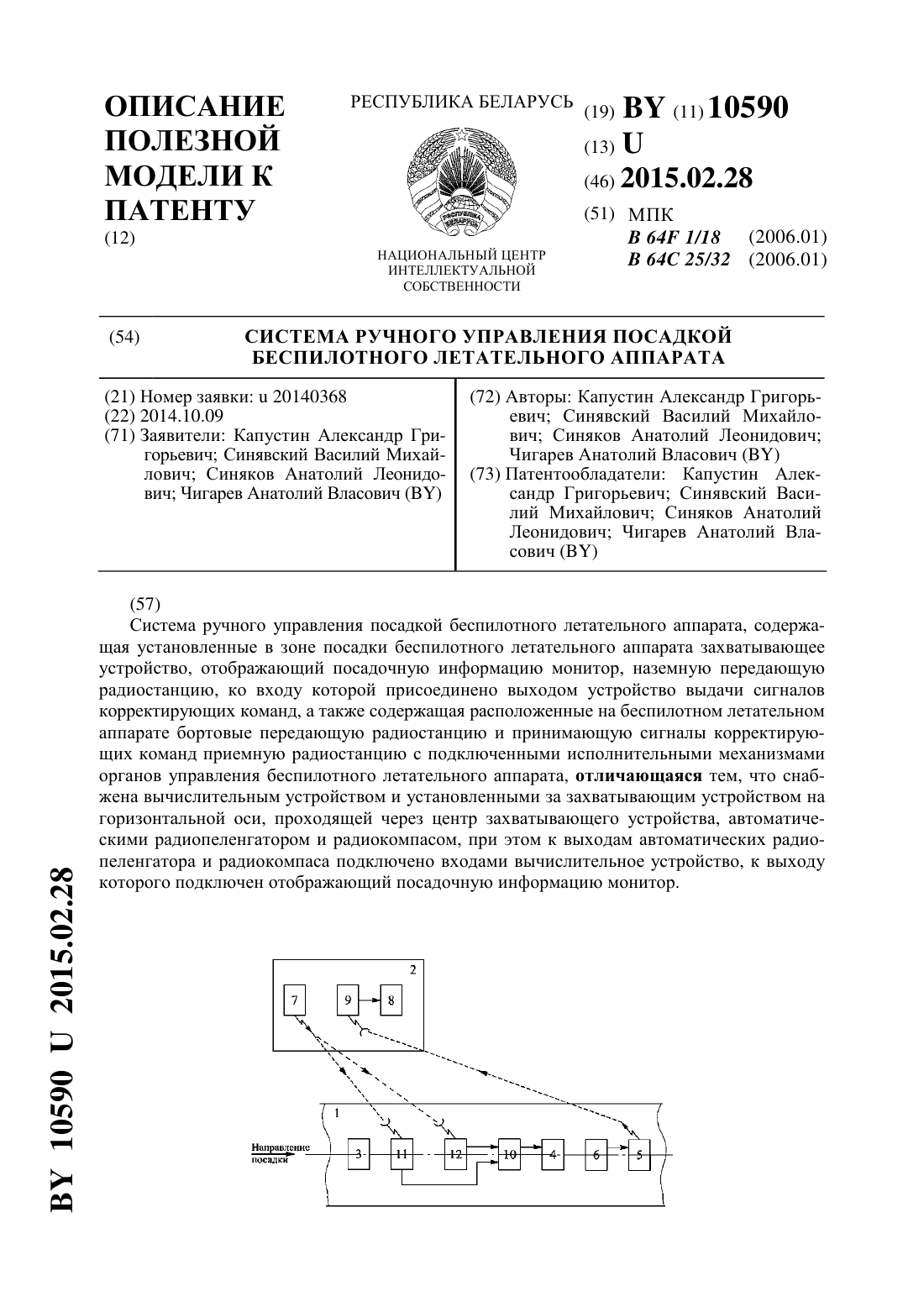
Система ручного управления посадкой беспилотного летательного аппарата, содержащая установленные в зоне посадки беспилотного летательного аппарата захватывающее устройство, отображающий посадочную информацию монитор, наземную передающую радиостанцию, коСистема ручного управления посадкой беспилотного летательного аппарата, содержащая установленные в зоне посадки беспилотного летательного аппарата захватывающее устройство, отображающий посадочную...
Парашютная система посадки беспилотного летательного аппарата

Номер патента: U 4111
Опубликовано: 30.12.2007
Авторы: Чаховский Юрий Николаевич, Луканин Геннадий Петрович
МПК: B64D 17/00
Метки: парашютная, летательного, аппарата, посадки, система, беспилотного
Текст:
...промежуточного звена подвесной системы. Для повышения надежности в данном случае необходимо увеличить длину указанного звена. Однако в ряде случаев это невозможно, поскольку приводит к неустойчивости движения объекта и всей системы, особенно когда объект обладает большим флюгерным моментом. Вынужденное использование короткого промежуточного звена подвесной системы приводит к отрицательным последствиям, характерным для предыдущего технического...
Способ определения ведомственной принадлежности беспилотного летательного аппарата
Номер патента: 15698
Опубликовано: 30.04.2012
Авторы: Воронин Олег Викторович, Иванишин Павел Валерьевич, Ярмонтович Константин Николаевич, Ольховик Анатолий Александрович, Денисенко Игорь Григорьевич
МПК: G01S 13/78
Метки: способ, беспилотного, определения, ведомственной, летательного, принадлежности, аппарата
Текст:
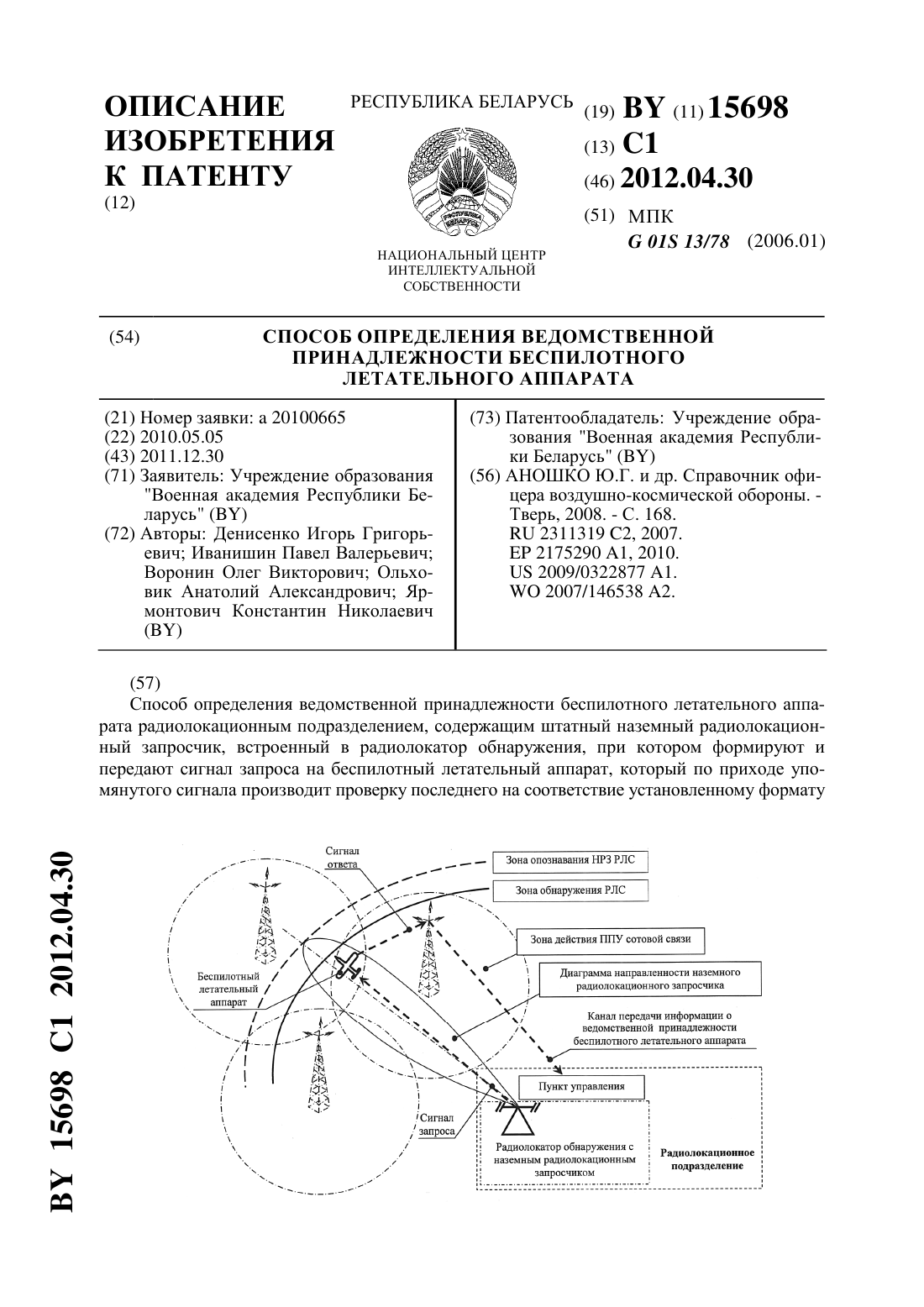
...аппарата специальной аппаратуры опознавания. По этой причине оснащение беспилотного летательного аппарата такими же образцами бортовой аппаратуры опознавания, как в пилотируемой авиации, по массогабаритным показателям (6-7 кг) затруднено. Задачей изобретения является обеспечение боевых расчетов пунктов управления ВВС и войск ПВО информацией о ведомственной принадлежности своих беспилотных летательных аппаратов при незначительном...
Наземно-бортовая система контроля летательного аппарата
Номер патента: 9618
Опубликовано: 30.08.2007
Автор: Безсчастный Василий Алексеевич
МПК: G06F 15/00, F02C 9/00
Метки: летательного, наземно-бортовая, аппарата, система, контроля
Текст:
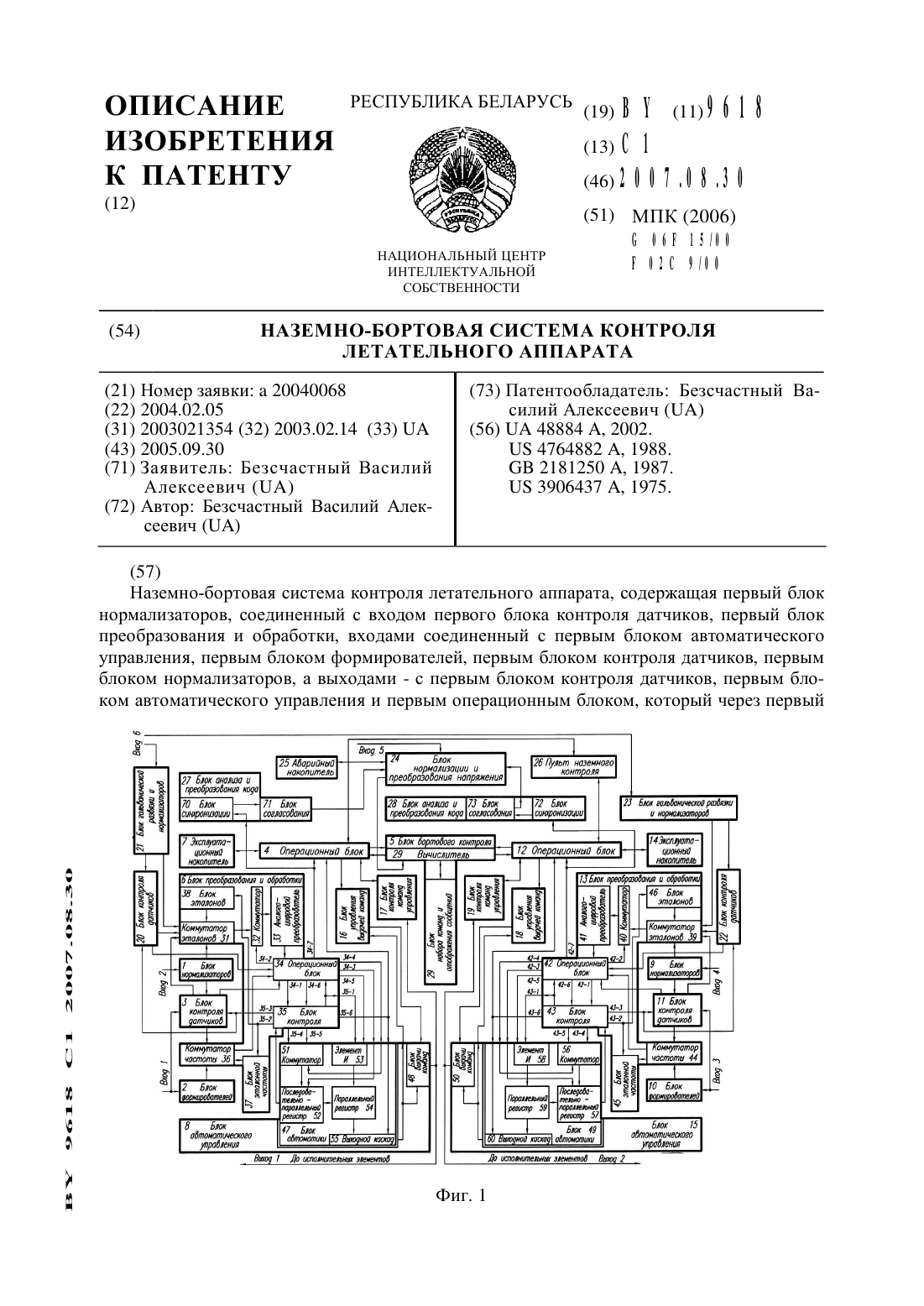
...второй блок преобразования и обработки (вторые блокэталонов, коммутатор эталонов, коммутатор, аналого-цифровой преобразователь, операционный блок, блок контроля, коммутатор Частоты, блок эталонной Частоты) по входу соединен со вторым блоком автоматического управления, вторым блоком формирователей,вторым блоком контроля датчиков, вторым блоком нормализаторов, а по выходу соединен со вторым блоком контроля датчиков, вторым блоком...
Система визуализации тренажера летательного аппарата для совместного обучения членов экипажа
Номер патента: U 985
Опубликовано: 30.09.2003
Автор: Елисеев Александр Викторович
Метки: совместного, экипажа, аппарата, тренажера, визуализации, членов, обучения, система, летательного
Текст:
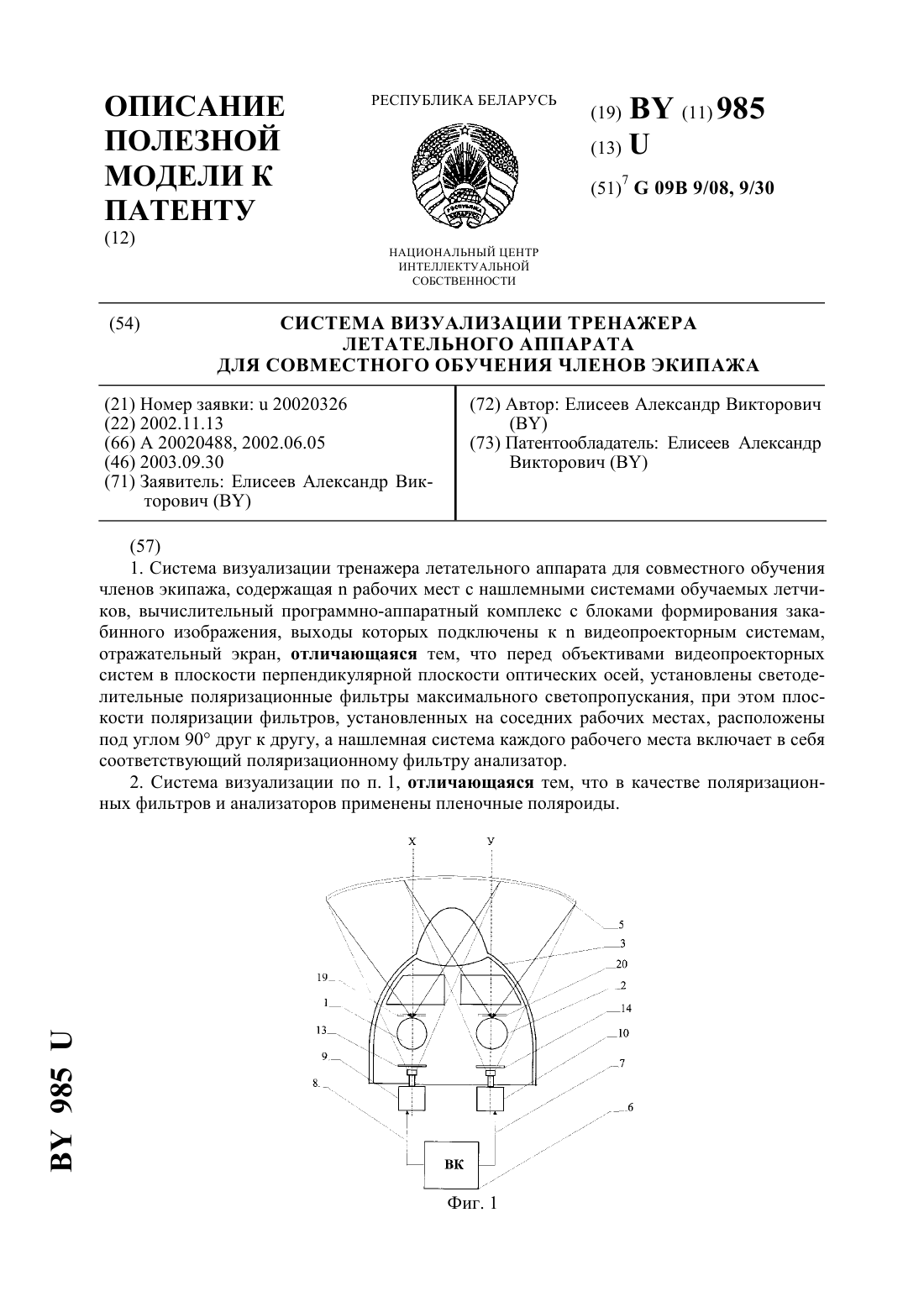
...и удешевлении конструкции системы визуализации тренажера ЛА для совместного обучения летчиков в составе экипажа. Поставленная задача достигается тем, что в известном устройстве системы визуализации тренажера летательного аппарата, содержащемрабочих мест с нашлемными системами обучаемых летчиков, вычислительный программно-аппаратный комплекс с блоками формирования закабинного изображения, выходы которых подключены квидеопроекторным...
Предыдущий патент: Линейный светодиодный светильник
Следующий патент: Панель облицовочная теплоизоляционная
Случайный патент: Устройство для отделения пчелиных рамок от сотов