Парашютная система посадки беспилотного летательного аппарата
Номер патента: U 4111
Опубликовано: 30.12.2007
Авторы: Чаховский Юрий Николаевич, Луканин Геннадий Петрович

Текст
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ПАРАШЮТНАЯ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА(71) Заявитель Республиканское унитарное предприятие Минский авиаремонтный завод(72) Авторы Луканин Геннадий Петрович Чаховский Юрий Николаевич(73) Патентообладатель Республиканское унитарное предприятие Минский авиаремонтный завод(57) Парашютная система посадки беспилотного летательного аппарата, содержащая планирующий парашют, кронштейн для крепления беспилотного летательного аппарата, основные стропы, соединенные с кронштейном, и стропы управления, соединенные с органами управления, отличающаяся тем, что в полости центроплана установлен механизм складывания крыла, позволяющий отклонять вверх отъемные части крыльев для увеличения флюгерного момента и обеспечения одновременного поворота купола парашюта и беспилотного летательного аппарата в направлении на ветер, причем рулевыми поверхностями отъемных частей крыльев являются элероны и флапероны, управляемые электромеханической системой регулирования беспилотного летательного аппарата.(56) 1. Крылья Родины. -3. - 1989. - С. 9. 2. Рекламный проспект фирмы Парафлайт (США) Система Пара-Пойнт - управляемая парашютная система, 1985. Полезная модель относится к области авиационной техники, в частности к средствам посадки беспилотных летательных аппаратов с помощью парашюта, и может быть использована для решения проблем, связанных с повреждением беспилотного летательного аппарата, обладающего высоким флюгерным моментом, при его посадке. Известна управляемая планирующая парашютная система, включающая парашютное крыло, выносной блок управления с приводами для подтягивания строп, соединенных с управляющими задними кромками купола, подвесную систему груза 1. Недостаток данной системы - возможность потери управления движением и ориентацией купола и груза определенным образом. Это объясняется тем, что в момент введения в действие парашютного крыла под влиянием набегающего потока возникает эффект самовращения крыла - режим авторотации, вследствие чего происходит закрутка в пучок строп и подвесной системы. При этом защемляются стропы управления. В результате движение становится неуправляемым до тех пор, пока не произойдет раскрутка строп за счет вращения груза под действием силы тяжести. Однако, если объект обладает флюгерным моментом, процесс раскрутки затягивается по времени либо может не произойти вовсе. В результате этого движение становится неуправляемым и приземление объекта произойдет вне заданной площадки с произвольной ориентацией, что может привести к его повреждению. Наиболее близким техническим решением, выбранным за прототип, является управляемая парашютная система 2, включающая парашютное крыло, выносной блок управления с приводами для подтягивания строп, соединенных с управляющими задними кромками купола, подвесную систему груза. Конструкция данной подвесной системы груза в отличие от вышерассмотренной облегчает процесс раскрутки строп благодаря тому,что для этого достаточно вращения только блока управления, который может вращаться до определенной степени, в зависимости от длины промежуточного звена подвесной системы. Для повышения надежности в данном случае необходимо увеличить длину указанного звена. Однако в ряде случаев это невозможно, поскольку приводит к неустойчивости движения объекта и всей системы, особенно когда объект обладает большим флюгерным моментом. Вынужденное использование короткого промежуточного звена подвесной системы приводит к отрицательным последствиям, характерным для предыдущего технического решения, т.е. неуправляемому движению и приземлению вне заданной площадки и повреждению объекта. Таким образом, недостатком данного технического решения является возможность защемления строп управления, а также повреждение объекта при его посадке за счет изменения непредсказуемым образом углов набегающего воздушного потока, что приводит к режиму авторотации. Целью полезной модели является повышение надежности управления куполом при посадке беспилотного летательного аппарата путем исключения защемления строп управления и уменьшения вращательного момента, создающего момент самовращения крыла,за счет одновременного поворота купола парашюта и беспилотного летательного аппарата в направлении на ветер. Техническим результатом осуществления полезной модели является использование при посадке беспилотного летательного аппарата с использованием парашюта отклоненных вверх отъемных частей крыльев как рулевых поверхностей, предотвращающих вращение аппарата вдоль вертикальной оси и обеспечивающих безаварийную его посадку. 2 41112007.12.30 При этом парашютная система, содержащая планирующий парашют с основными стропами и стропами управления, жестко закреплена на кронштейне, выполняющем роль промежуточного звена подвесной системы. Складывание крыльев обеспечивает увеличение флюгерного момента с целью одновременного поворота купола парашюта и беспилотного летательного аппарата в направлении на ветер и уменьшение момента, создающего самовращение крыла. Горизонтальная скорость набегающего потока воздуха дает возможность использовать управление рулевыми поверхностями отклоненных вверх отъемных частей крыльев (элеронами и флаперонами) для предотвращения вращения беспилотного летательного аппарата и защемления строп управления. На фигуре изображена система, обеспечивающая посадку беспилотного летательного аппарата. Парашютная система посадки беспилотного летательного аппарата содержит планирующий парашют 1, кронштейн 2 для крепления беспилотного летательного аппарата 3,основные стропы 4, стропы управления (клеванты) 5. соединенные с органами управления 6. Основные стропы 4 соединены с кронштейном 2. В полости центроплана установлен механизм складывания крыла 7, позволяющий отклонять вверх отъемную часть крыла 8. Рулевыми поверхностями являются элероны 9 и флапероны 10, управляемые электромеханической системой регулирования 11. При введении в действие парашютной системы (сначала вытягиваются стропы на всю длину, затем раскрывается купол и включаются механизмы складывания крыльев 7) в случае возникновения вращения купола 1 относительно беспилотного летательного аппарата 3 электромеханическая система регулирования 11, управляя стропами управления 5,элеронами 9 и флаперонами 10, исключает закрутку основных строп 4 и строп управления 5 в пучок и тем самым предотвращает повреждение беспилотного летательного аппарата при посадке. Управление курсом осуществляется поочередным затягиванием и отпусканием строп управления 5 органами управления 6, углом наклона траектории - одновременным. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: B64D 17/00
Метки: беспилотного, летательного, парашютная, система, посадки, аппарата
Код ссылки
<a href="https://by.patents.su/3-u4111-parashyutnaya-sistema-posadki-bespilotnogo-letatelnogo-apparata.html" rel="bookmark" title="База патентов Беларуси">Парашютная система посадки беспилотного летательного аппарата</a>
Наземно-бортовая система контроля летательного аппарата
Номер патента: 9618
Опубликовано: 30.08.2007
Автор: Безсчастный Василий Алексеевич
МПК: G06F 15/00, F02C 9/00
Метки: летательного, наземно-бортовая, система, аппарата, контроля
Текст:
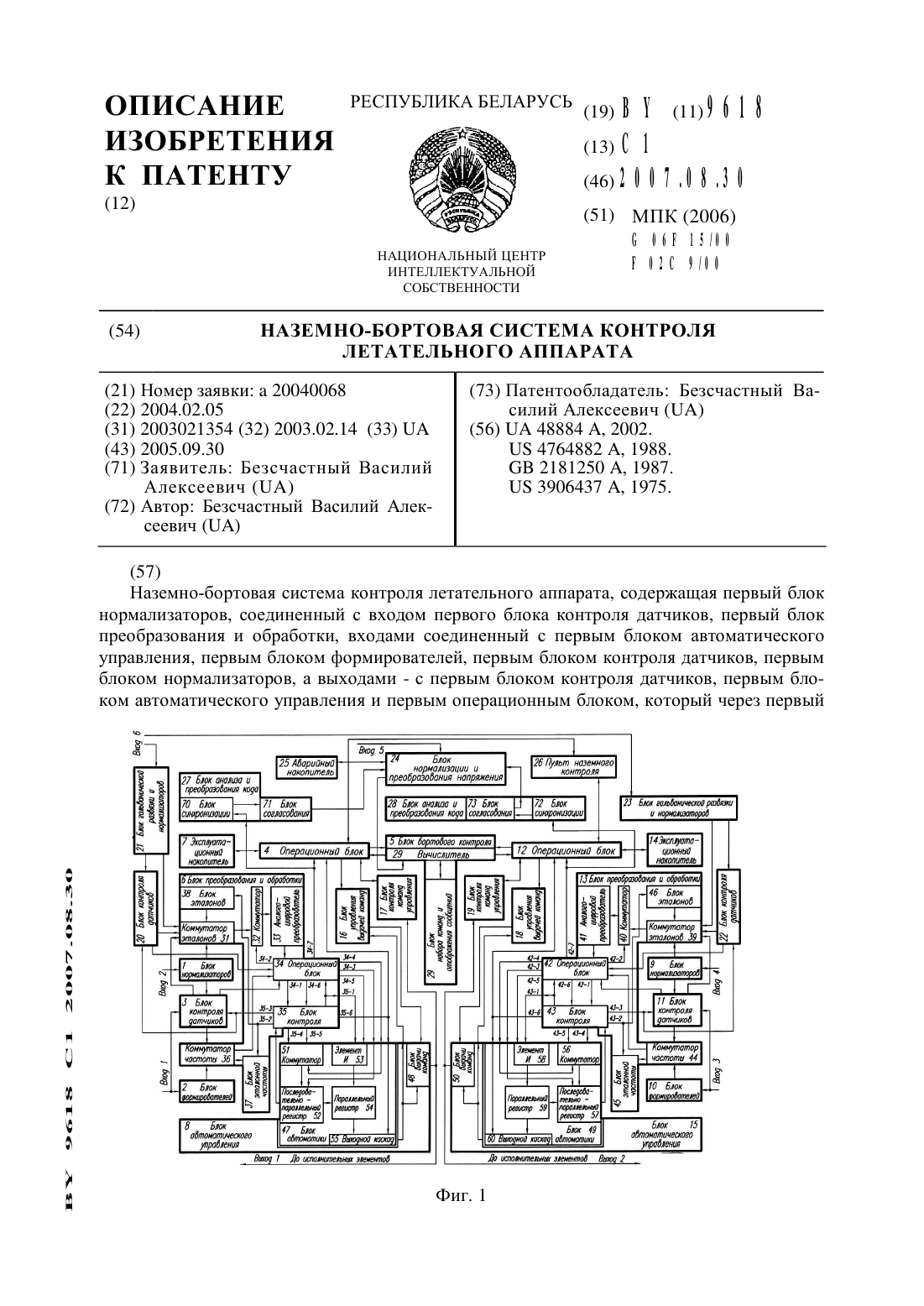
...второй блок преобразования и обработки (вторые блокэталонов, коммутатор эталонов, коммутатор, аналого-цифровой преобразователь, операционный блок, блок контроля, коммутатор Частоты, блок эталонной Частоты) по входу соединен со вторым блоком автоматического управления, вторым блоком формирователей,вторым блоком контроля датчиков, вторым блоком нормализаторов, а по выходу соединен со вторым блоком контроля датчиков, вторым блоком...
Система визуализации тренажера летательного аппарата для совместного обучения членов экипажа
Номер патента: U 985
Опубликовано: 30.09.2003
Автор: Елисеев Александр Викторович
Метки: аппарата, экипажа, совместного, система, летательного, тренажера, визуализации, обучения, членов
Текст:
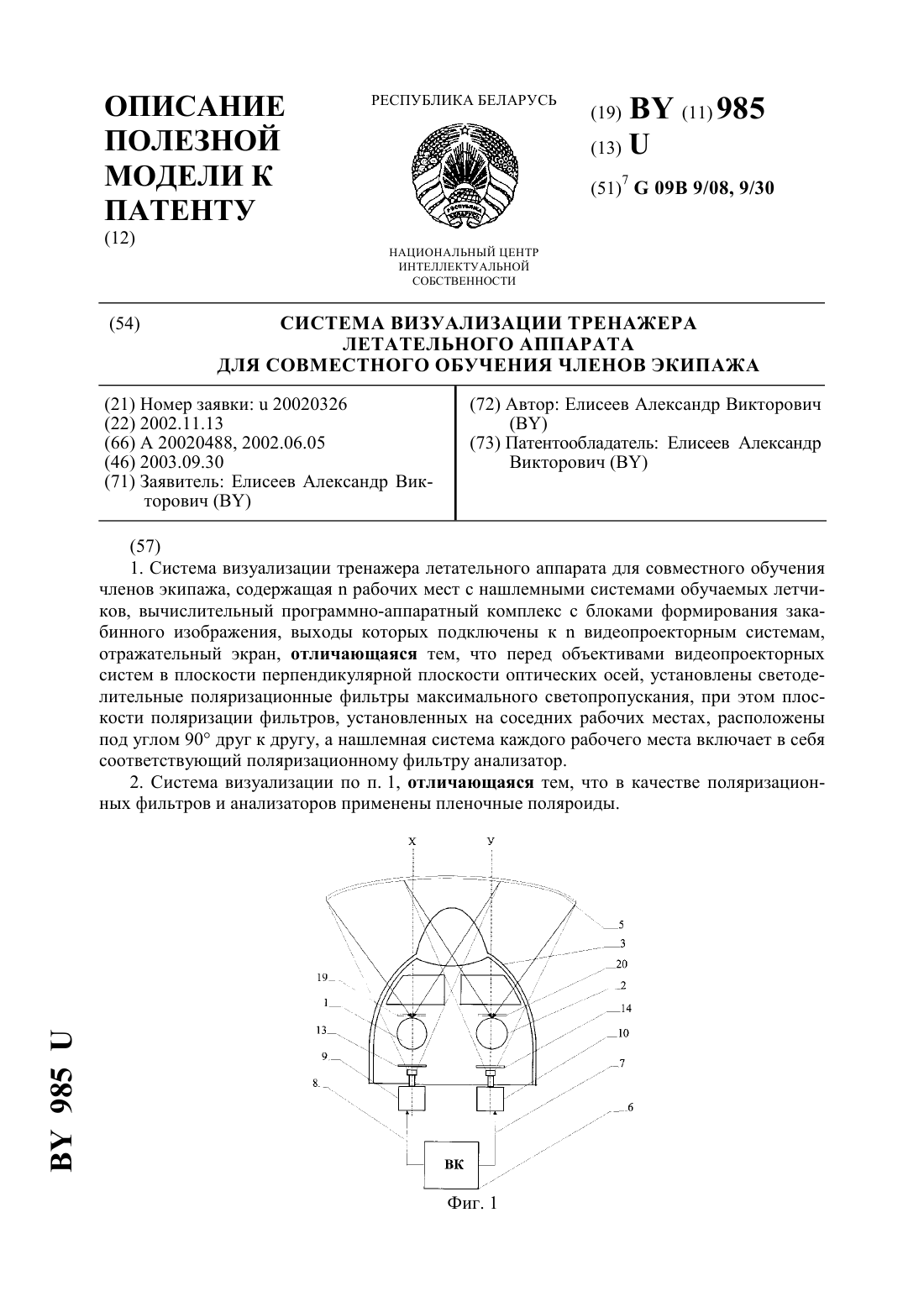
...и удешевлении конструкции системы визуализации тренажера ЛА для совместного обучения летчиков в составе экипажа. Поставленная задача достигается тем, что в известном устройстве системы визуализации тренажера летательного аппарата, содержащемрабочих мест с нашлемными системами обучаемых летчиков, вычислительный программно-аппаратный комплекс с блоками формирования закабинного изображения, выходы которых подключены квидеопроекторным...
Система мониторинга летательного аппарата
Номер патента: U 3985
Опубликовано: 30.10.2007
Авторы: Колесников Александр Анатольевич, Скубилин Михаил Демьянович, Симбейе Дауди Самсон
МПК: G05B 23/00
Метки: аппарата, мониторинга, система, летательного
Текст:
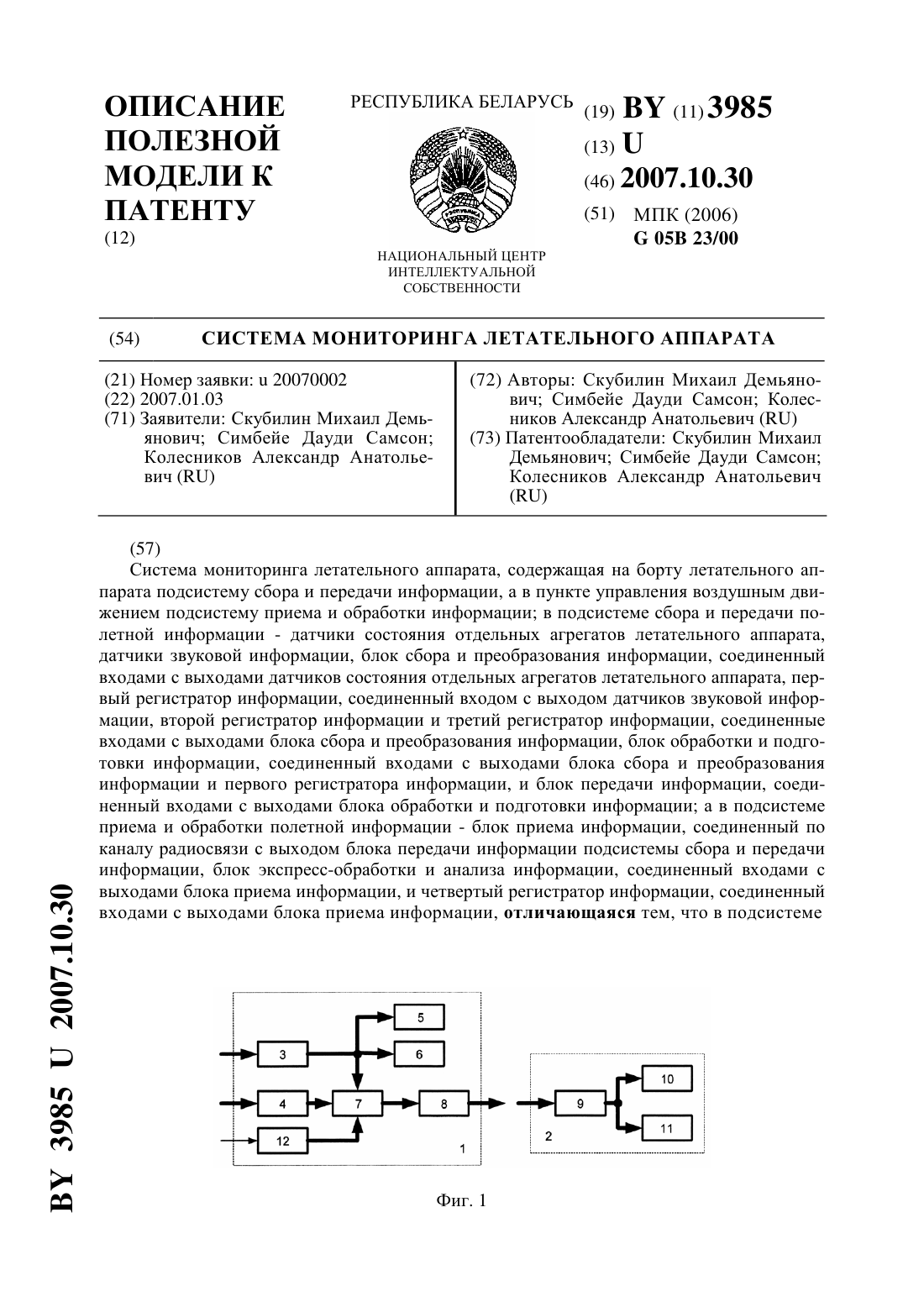
...соединенный входами с выходами блока 9 приема информации, а в подсистеме 1 сбора и передачи информации,дополнительно, введен блок 12 контроля состояния человека-оператора, соединенный выходами со входами блока 7 обработки и подготовки информации. Блок 12 контроля состояния человека-оператора (фиг. 2) включает датчик 13 пульса сердца, генератор 14 тактовых импульсов, первый (счетный) триггер 15, субблок 16 контроля аритмии...
Система визуализации тренажера летательного аппарата для совместного обучения членов экипажа

Номер патента: 9592
Опубликовано: 30.08.2007
Автор: Елисеев Александр Викторович
МПК: G09B 9/02
Метки: система, совместного, летательного, членов, тренажера, обучения, экипажа, визуализации, аппарата
Текст:
...обстановки с каждого рабочего места пропорционально зоны видимости в соответствующих условиях реального полета. Задачей изобретения является обеспечение координатного отображения объектов закабинного пространства для каждого рабочего места пропорционально зоны видимости в соответствующих условиях реального полета при упрощении и удешевлении системы визуализации тренажера ЛА для совместного обучения летчиков в составе экипажа....
Система подвижности кабины пилотажного тренажера летательного аппарата

Номер патента: 7350
Опубликовано: 30.09.2005
Автор: Елисеев Александр Викторович
МПК: G09B 9/20
Метки: система, летательного, тренажера, кабины, пилотажного, подвижности, аппарата
Текст:
...на фиг. 1 Фиг. 3 - механизм обеспечения подвижности по тангажу Фиг. 4 - механизм обеспечения подвижности по крену Фиг. 5 - схема привода вращения рамы по тангажу Фиг. 6 - схема привода вращения рамы по крену Фиг. 7 - компенсатор крутящего момента Фиг. 8 - гидравлический аварийный тормоз. Система подвижности кабины пилотажного тренажера летательного аппарата содержит вилкообразное основание 1, выполненное в виде трубчатого прямоугольного...
Предыдущий патент: Атмосферный патрубок тормозного пневматического аппарата
Следующий патент: Устройство для изготовления испарителя контурной тепловой трубы
Случайный патент: Способ производства алюминиевой пасты