Подвижная шпалоподбивочная подъемная и рихтовочная машина
Текст
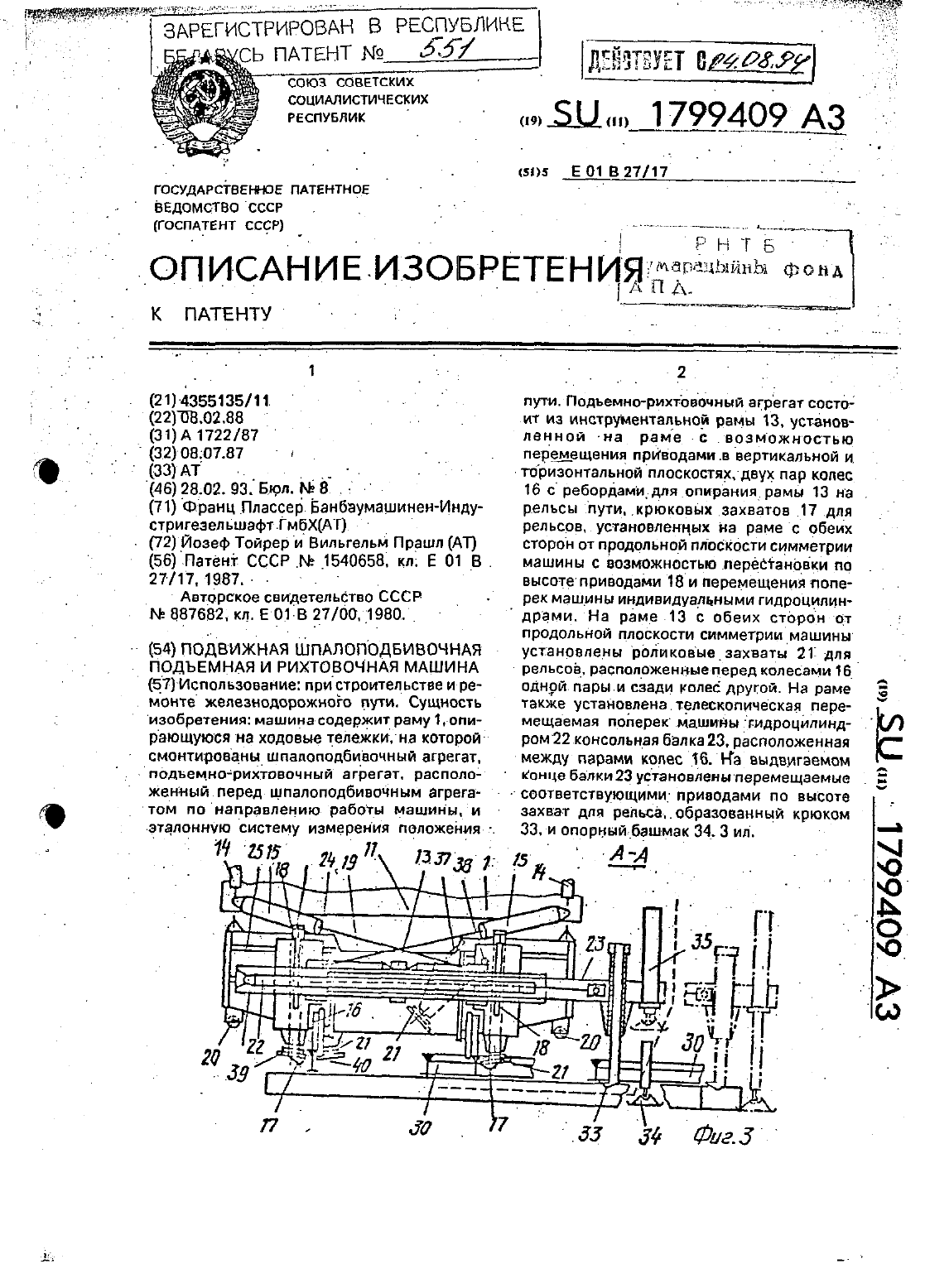
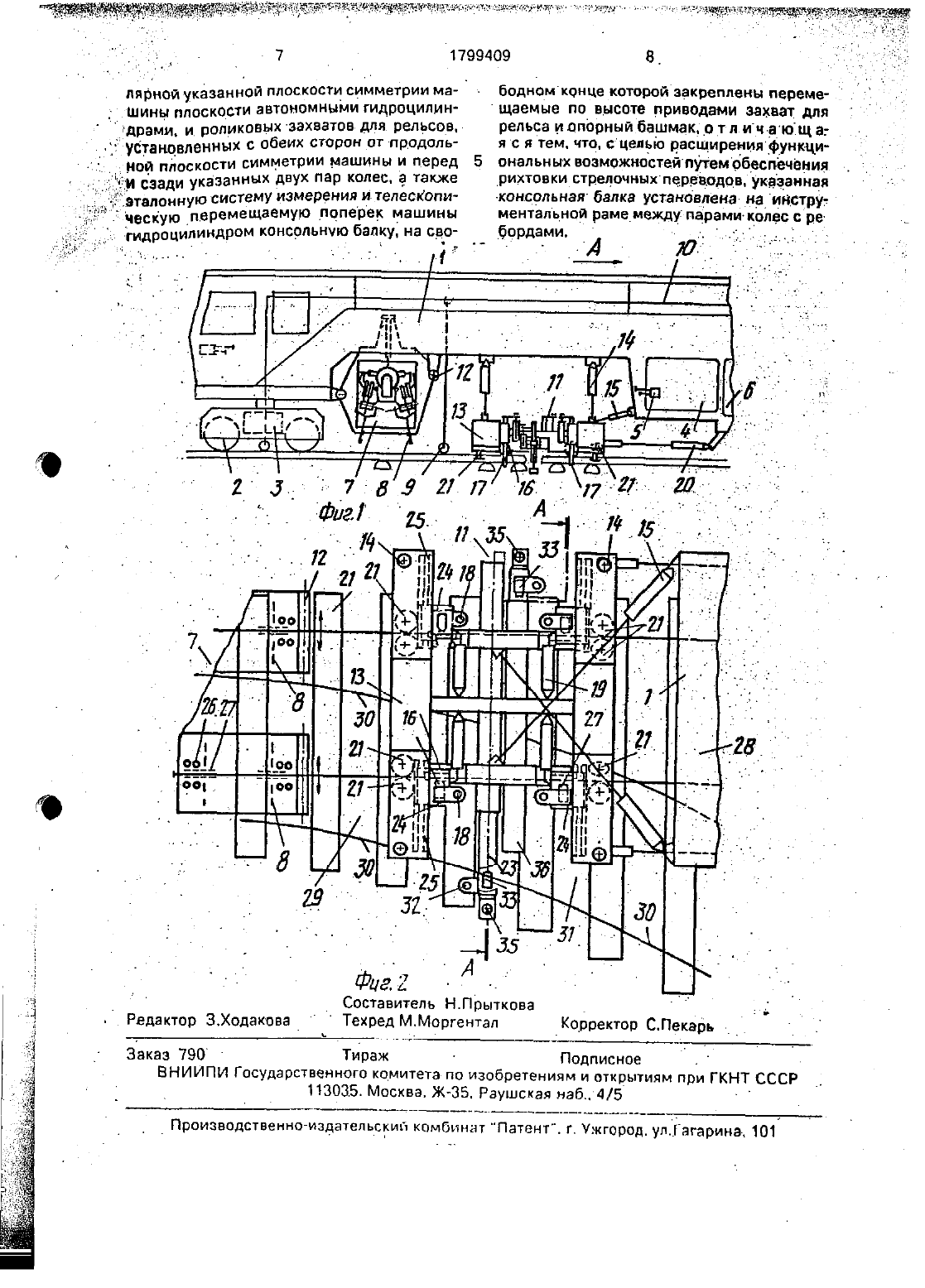
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБП ИКгосудлрственътое ПАТЕНТНОЕ ВЕДОМСТВО СССР27/17. 1987. - - . Авторское свидетельство СССР Мг 887 б 82 кп. ЕО 1-В 27/00.1 ЭВ 0.(54) подвижны шпАлоподвивочндя ПОДЪЕМНАЯ И РИХПТОАВОЧНА-Я МАШИНАизобретения машина содержит раму 1.-опи ра-ющуюся на ходовые тележкигна которойжеунныйлередл шпалоподбивочным агрема том по направлению работы машины, и эталонную систему измерения положения-п. . т о 2 2-11-4355135/11. пути. Подьемно-рихтовочныиагрегат состо И (220 В.02.88 .ит из инструментальной рамы 13. установ ленной -на раме с цвозможностью перемещения приводами .в вертикальной и.- горизонтальной плоскостяждвух пар колес16 с ребордами для опиранил рамы 13 На .рельсы пути. тсрюковых захватов 17 для рельсов, установленных на раме ос обеих сторон от продольной плоскости симметрии машины с возможностью перестановки по высотеприводатчи 18 и перемещения поперек машины индивидуальными гидроцилин драми. На раме 13 с обеих сторон от- рельсо. расположенные перед колесами 16однриларыи сзади колес другой. На раме также устаноелена т телескопическая пере мещаемая поперек машины гидроцилинд- .ром 22 консольная балка 23. расположенная о между парами колес 16. На выдеигаемом конце балки 23 установленьгперемещаемыезахват для репнсаобразованный крюком 33. И опорныйдбашмаи 34. 3 ил.Изобретение относится к устройствам для ремонта железнодорожного ПУТИ- .Цель изобретения - расширение функциональных возможностей машины путем обеспечения рихтовки стрелочных переводов.На фиг. 1 изображена частично подвиж ная шпалоподбиаочная. Подъемная И РИХТОвочная машина. общий вид На Фиг. 2 подъемно-рихтоврчныйагрегат. план на фиг. 3 - разрез А-А на фиг. 2.Подвижная шпалоподбивочная, подъемная и рихтовочная машина содержит раму Д-опирающуюся на ходовые тележки 2 с приводом 3 перемещения по железнодорожному пути. На раме 1 смонтированы рабочая кабина 4 с блоком 5 управления.энергетическая силовая установкаб для пи- бтания различных приводов. Шогдоподбиовочный агрегат 7. в котором для каждого рельса пути имеется восемь подбоек 8. эталонная система измерения положения пути. включающая е себя взаимодействующие -с рельсами контактные ролики 9 и базовую прямую 10 отсчета. и лодьемно-рихтовочный агрегат 11, расположенный перед агрегатом по направлению А работы машины. Дляуточной ориентации подбоек В агрегата 7 относительно подбиваемых шпал в эонах стрелочных переводов агрегат 7 установлен на поперечных направляющих 12.закрепленных на раме машины с возможно СТЬЮ перемещения поперек .МВШИНЬ ПО датим направляющим 1.2.Агрегат 11 состоит из инструментальной рамы 13. установленной на раме 1 сВОЗМОЖНОСТЬЮ ПВВВМВЩВНИП четырьмя ГИДроцилиндрами 14 в вертикальной плоскости И двумя рихтовочными гидроцилиндрами 15 в горизонтальной плоскости. двух пар колес 16 с ребордами для опирания рамы 131 на рельсы. крюковых захватов 17 для рельсов.пиндром 22, консольная балка 23. расположенная между парами колес 16 среборда ми. Крюковые захваты 17 расположенывдоль машины на расстоянии друг от-друга. преимущественно соответствующем двойному расстоянию между осями симметрии двух смежных шпальных ящиков.для поперечного перемещения крюковых захватов 17 они имеют опору для пере становки по высоте в направляющем блоке д25, по которым гидроцилиндрами 19 пере-бКак видно из схематинеского изображе-дния слева на-фиг. 21 обоих шпалоподбивочных агрегатов 7 подбойки 8 связаны сподбойки В расположены с возможностью бокового отклонения вокруг проходящейепродольном направлении машины повороту ной оси 27 поперек пути независимодруг отдруга. для того. чтобы можно было вкаждом конкретном случае-уклонятьсяот- имеющих ся на сложном унастке стрелки или скрещи 25проходящих через оси колес 16 и установ пенных на раме 13 с обеих сторонтот про дольной плоскости симметрии машины свозможностью перестановки по высоте про водамидв и перемещения в вертикальнымперпендикулярной этой плоскости симметрии машины плоскости автономными гидроцилиндрами, 19.смещения. На раме 13 б обеих сторон от продольной плоскости симметрии машины установлены роликовые захваты 21 для рельсов. расположенные перед колесами 16 одной пары и сзади колес 16 другой. На оаме 13 также установлена телескопическая Перемещаемая поперек машины гидроциответвляется от образованного рельсами-ц, 7который состоит из рельсов 30 и болеедлин ных на этом участке шпал-брусьевЦСбоку от машины или. как видно на этом чертеже-ниже пути 28 находится образованный Боковым путем 29 (на виде сверху на фиг 2 показанный ниже или рядом сднутем 28). расширенный участок стрелкиили- скрещи вания пути 31.-Рас 1 оложенн 5 ая для поднятия одного -рельса 30 этого участкам пути 31 на инструментальной раме 13. балка д 23 имеетна выдвигаемом внешнем конце перемещаемых приводом 32 -по высоте захват для рельса. образованный крюком 33.1 и опор ный башмак 34. Перемещаемый по высотенаходится-в выдвинутом и опущетнном поло женин и захватывает снизу подошву нижне- го рельса 30. д Таки-м образом для . предусмотренного процесса подъема путина этом тяжелом участке со стрелочным пе реводом обеспечивается подхват в целомчетырьмя крюковыми захватами 17 обоих рельсов пути 28 и одним крюком 33 нижнего рельса 30 за подошву рельсов. аьтакже дву мя парами роликовых захватов 21 за головкурельса одного из рельсов пути 28 и одной парой роликовых захватов 21 и одним роли комзахватов 21 заголовку нижнего на этом чертеже рельса пути 2 В.На инструментальной раме 13 закрепдпена еще одна телескопическая консольная балка 36. выполненная аналогично балке 23. но перемещвемый конец балки Зб рас- положен с другой стороны рамы 1 машины.ЧТО ОБЕСПЕЧИВЭЭТЗЗХВЗТ стрелочного перевода ПО ВСЕЙ ЕГО ширине. КОГДЗ бОКОВОЙ ПУТЬ. направлен в противоположную от пути 29Каждый ролик захватов 21 для рельсов установлен на опоре. которая приводом 37 поворачивается в поперечном направлении вокруг оси 38. На нижней поверхности каждого ролика захватов 21 выполнен подъемный диск 39. вращающийся вокруг оси 40. расположенной в вертикальной плоскости.длина каждого крюкового захвата 17 подо- тбранатаким образомчтобы им можно было захватить как головку. так и подошву рель са. . . е Машина работает следующим образом.роцилиндров 14 осуществляется подъем СТРЕЛКИ ДО ТЕХ ПОР. пока С ПОМОЩЬЮ СОседе ствующего с подъемно-рихтовочным агрега том 11 контактного ролика 9 не будетнайдено правильное по высоте положение по отношению к прямой 10 эталонной системы. Одновременно корректируются такжеПОГРВШНОСТИ ПИХТОВКИ СТРЕЛКИ. посредст-д вом задействования двух рихтовочных гидроцилиндров 15 до тех пор. пока с помощью не описываемой более подробно рихтовочной эталонной системы не будет достигнуто правильное положение пути в плане. Как только этот участок стрелкиди скрещении пути 31 в вышеописанной начальной зоне приводится вправильное положение по вы соте и в плане. осуществляется подбивкаМашина в рабочем режиме управляется -ром с помощь-ю блока 5 управления. Как только машина выдвигается в начальную зо ну участка стрелочного перевода (см. фиг. 2). . производится откидывание вверх находя.щихся над боковым путем 29 роликовых за- 4хватов 21. которые расположены (см. один из откинутыхвверх подьемных роликов 25)на нижнем рельсе пути 28. Все четыре за хвата 17 могутприкладываться к внешнейстороне главного пути 28 и смещаются подвоздействием- гидроцилиндров 19 поперечното смещения вдоль направляющих 25 наружудо тех пор. пока не будет обеспеченКОНТЭКТС ГВОМЕТДИЧЕСКИМ ЗЭМЫКЭНИВМ крю 25расположенной между подбойками В попеРечной шпалы. . С помощью выполненной согласно изобретению машины могут также подниматьучастки пути.производится их рихтовка и-подбивка шпал.причем целесообразно зацепление только восьми роликов захватов 21.Естественно. что в случае необходимости на магистральном участке пути могут использоваться также все четыре крюка за балка 23 с крюком 33 пригодна также длякового захвата 17 с рельсом главного пути - т28. После этого или одновременно с этимбалка 23 на участке бокового пути 29 с по мощью гидроцилиндра 22 смещается нару- .жу до тек пор. пока захватный крюк 33 с помощью своего привода 32 регулирования. по высоте не войдет в прилегающий контакт с наружным рельсом 30 в зоне между шпа лами.балласт между шпалами. В представленном на Фи г. 2 положении показан очень тяжелыйстрелочный перевод с тяжелыми железобе ТОННЫМИ ШПЗПЭМИ ПОДХВЭТЫВЭВТСЯ СЕМЫО. прикладываемыми к внешней или внутрен ней стороне рельса роликовыми захватами 21 и всеми пятью крюковыми захватами- или 33 и зажимается с геометрическим за МЫКЭНИЕМ В СОЧВТЭНИЙ С четырьмя СООТВЕЗТСТВВННО расположенными ЬЗПВОТИВ крюков захватов 17 колесами 16 с ребордами.бный агрегат. оснащенный только однимудля дкаждойрельсовой нити. захватом-1 7. так как с помощью дополнительного третьего выдвигаемого в боковом направлении захватного крюка 33 может быть достигнут более надежный захват. Формула изобретения Подвижная шпалоподбивочная. подъем 7 ная и рихтовочная машина. содержащая опир-ающуюся на ходовые тележки раму. смонтированные на ней шпалоподбивочныйрасположенныйтеред. шпалоподбивочным агрегатом. и состоящий из инструменталь ной рамы. установленнойна раме машинысвозможностью перемещения приводами в вертикальной плоскости и рихтовочными приводами в горизонтальной плоскости и соединенной с рамой машины тягой. двух пар колес с ребордами для опиранияинструментальной рамы на рельсы. кръоковыхмТИКЗДЬНЫХ плоскостях. проходящих через ОСИ УКВЗЭННЫХ КОЛЕС И УСТЗНОВПЕННЫХ напродольной плоскости симметрии мапоины с возможностью перестановки .по высоте и перемещения в вертикальной. перпендикухватов 17. В рамках данного изобретения-установленных с обеих сторон от продольдддой указанной плоскости симметрии ма- шины плоскости автономными гидроцилин- драмд и родиковых захватов. для рельсов.щаемые по высоте приводами захват для рельса и опорный башмак, о рт л ич аю 2 щ а я с я тем. что. с-целью расщиренияфрункци ной плоскости симметрии машины и перед 5 ональны-х воэможностейпутемобсслсчениябзади указанных ДВУХ пар КОДЕС. ТЗКЬКЗ рИХТОВКИ стрелочных псрсцодов. УКЗЭННЯческую перемещаемую поперек МЭШИНЫ ментальной РЗММЗЖДУ, ПЭПММОЛВСЪСЗаказ 790 - Тираж Подписное г. . н а ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035. Москва, Ж-ЗБ. Рзушская наб 4/5
МПК / Метки
МПК: E01B 27/17
Метки: подвижная, шпалоподбивочная, подъемная, машина, рихтовочная
Код ссылки
<a href="https://by.patents.su/4-551-podvizhnaya-shpalopodbivochnaya-podemnaya-i-rihtovochnaya-mashina.html" rel="bookmark" title="База патентов Беларуси">Подвижная шпалоподбивочная подъемная и рихтовочная машина</a>
Подвижная шпалоподбивочная нивелировочная и рихтовочная машина
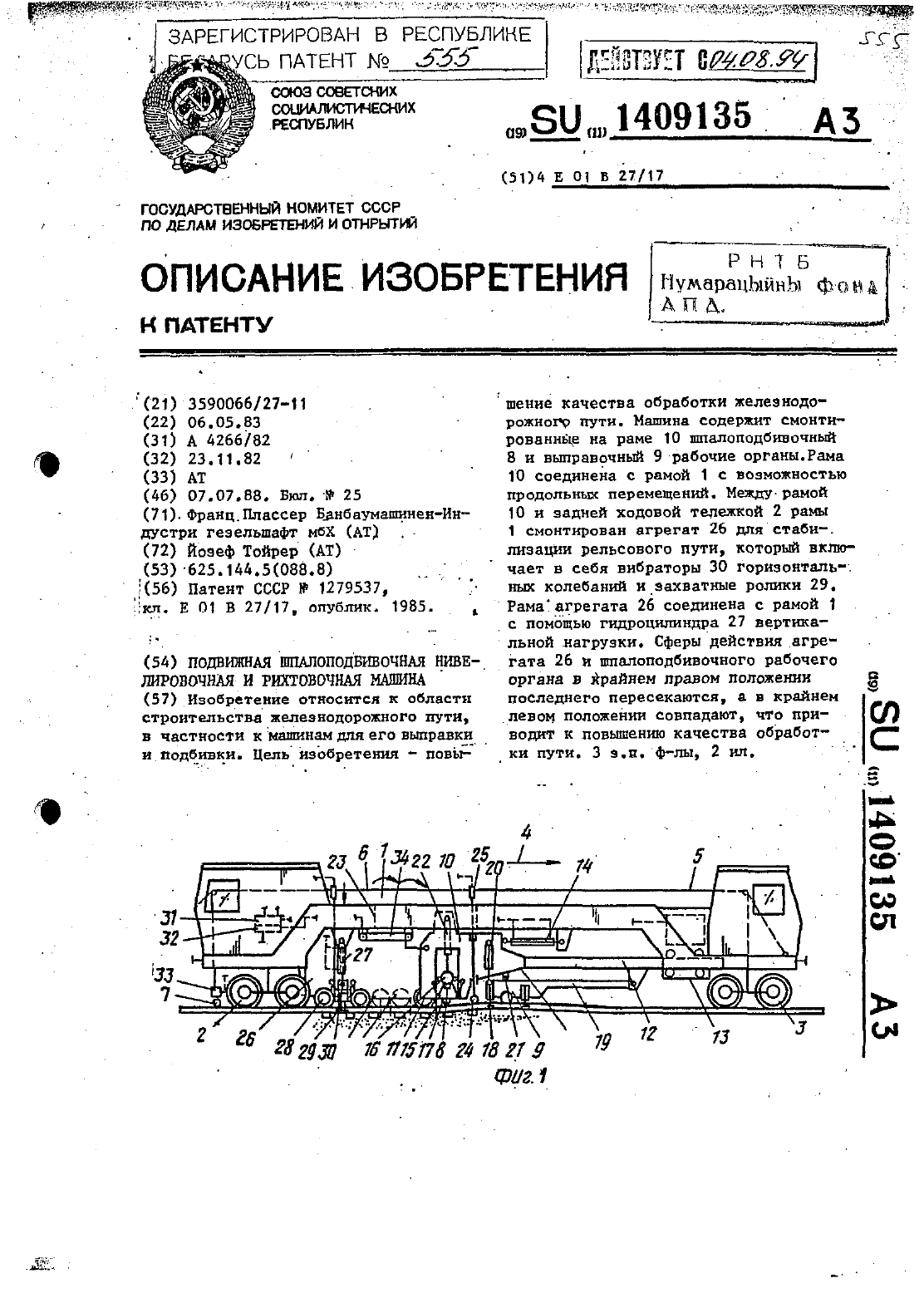
Номер патента: 555
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/17
Метки: нивелировочная, машина, подвижная, рихтовочная, шпалоподбивочная
Текст:
...пор,пока рабочн орган не оказывается в центрированием положениипо отношению к следующей подбиваемой шпала. Одновременно с опусканием шпалопод бивочного 8 рабочего органа устанавливается в нуль прибор для измеренияРЗССТОЯНИЯ, ПОСЛЕ ЧЕГО начинается повторньй рабочий цикл Аналогичнъй процесс перемещений производится при использовании регистрирующего смещение рамы 10 ирамы 1 относительно друг друга потен- 30циометра натяжения тросе 34, который...
Подвижная шпалоподбивочная машина
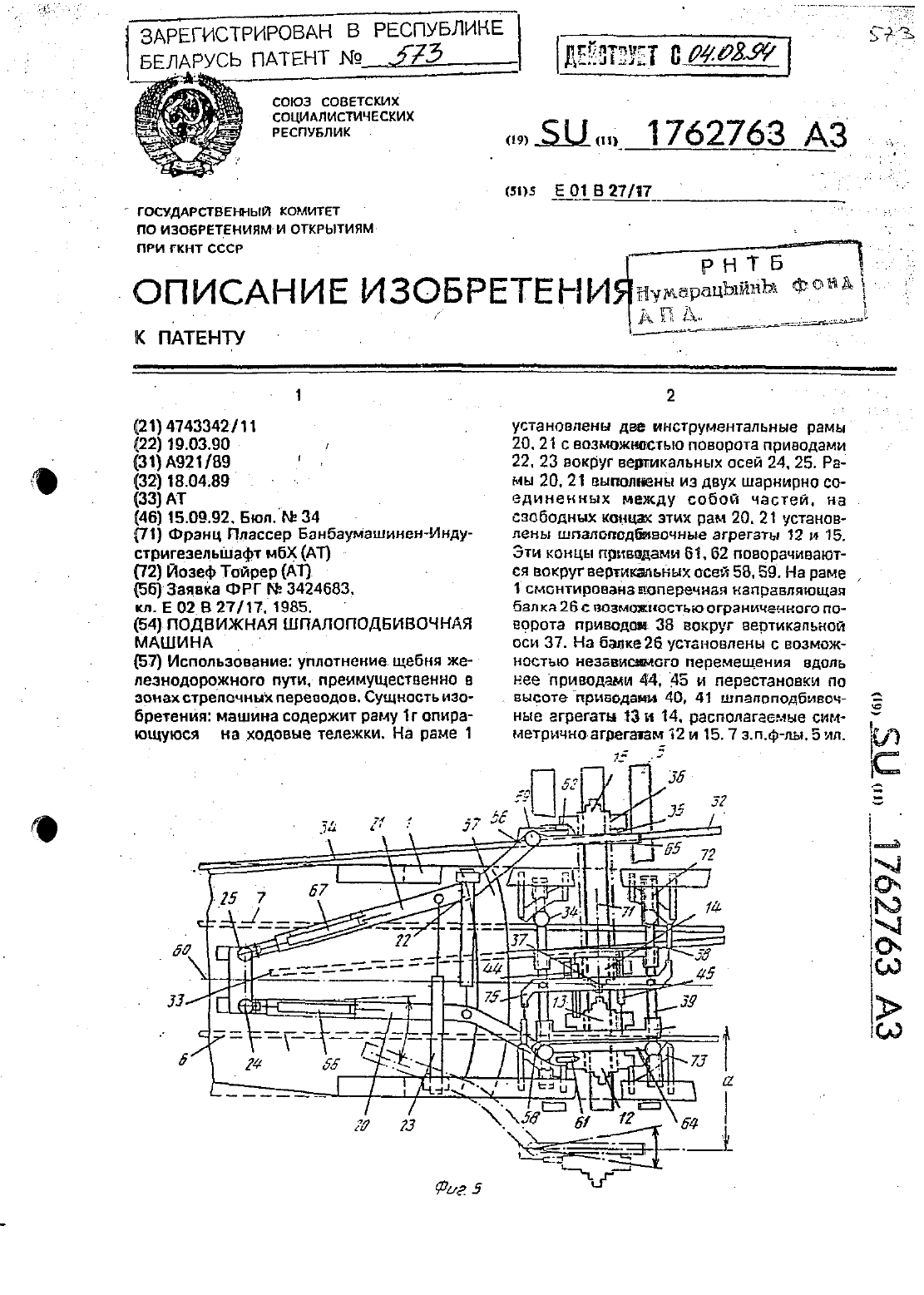
Номер патента: 573
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/17
Метки: подвижная, шпалоподбивочная, машина
Текст:
...ППОДОПЬНОЙ ПСИ 60 пути или машины и относительно внут противоположных вертикальным осям 24,ренних агрегатов 13 и 14 соединены соответственно с приводами 61. 62. Обе пары 16. 19 подбивочных инструментовсбоътх наружных агрегатов 12 н 15 через привОдН 53 перемещения по высоте устанавливаются на агрегатных рамах 64. 65. Каждая из двух инструментальных рам 20. 21 выполнена твлескопичвски удлиняемой и соединена с собственнымтриводом 66. 67...
Подвижная шпалоподбивочная машина
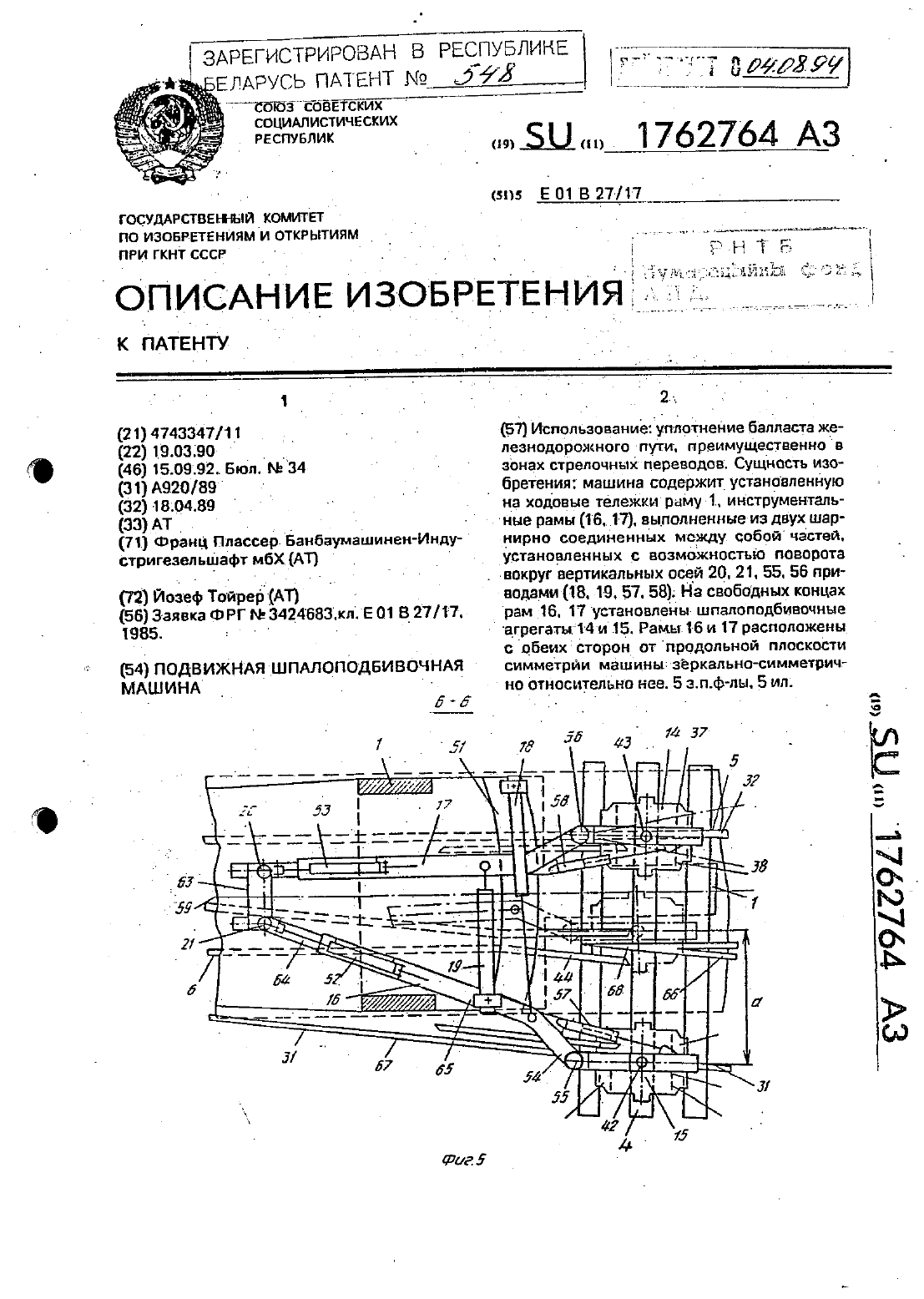
Номер патента: 548
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/17
Метки: шпалоподбивочная, подвижная, машина
Текст:
...стойку 63 подшипников. соединенную с рамой 1. Каждая из двух , инструментальнык рам 16.17 составлена изД прямоугольной внутренней балки 64. соеди друг от друга откидываться вбокпри помо- .щи собственн ык гидроприводов 39 и 40 вокруг осей 41. проходящик параллельно продольному направлению машины. и независимо друг от друид-Каждый агрегат 14 и 15 через собственный привод 42 и 43 перестановки по высоте установлен для независимого друг от...
Шпалоподбивочная машина
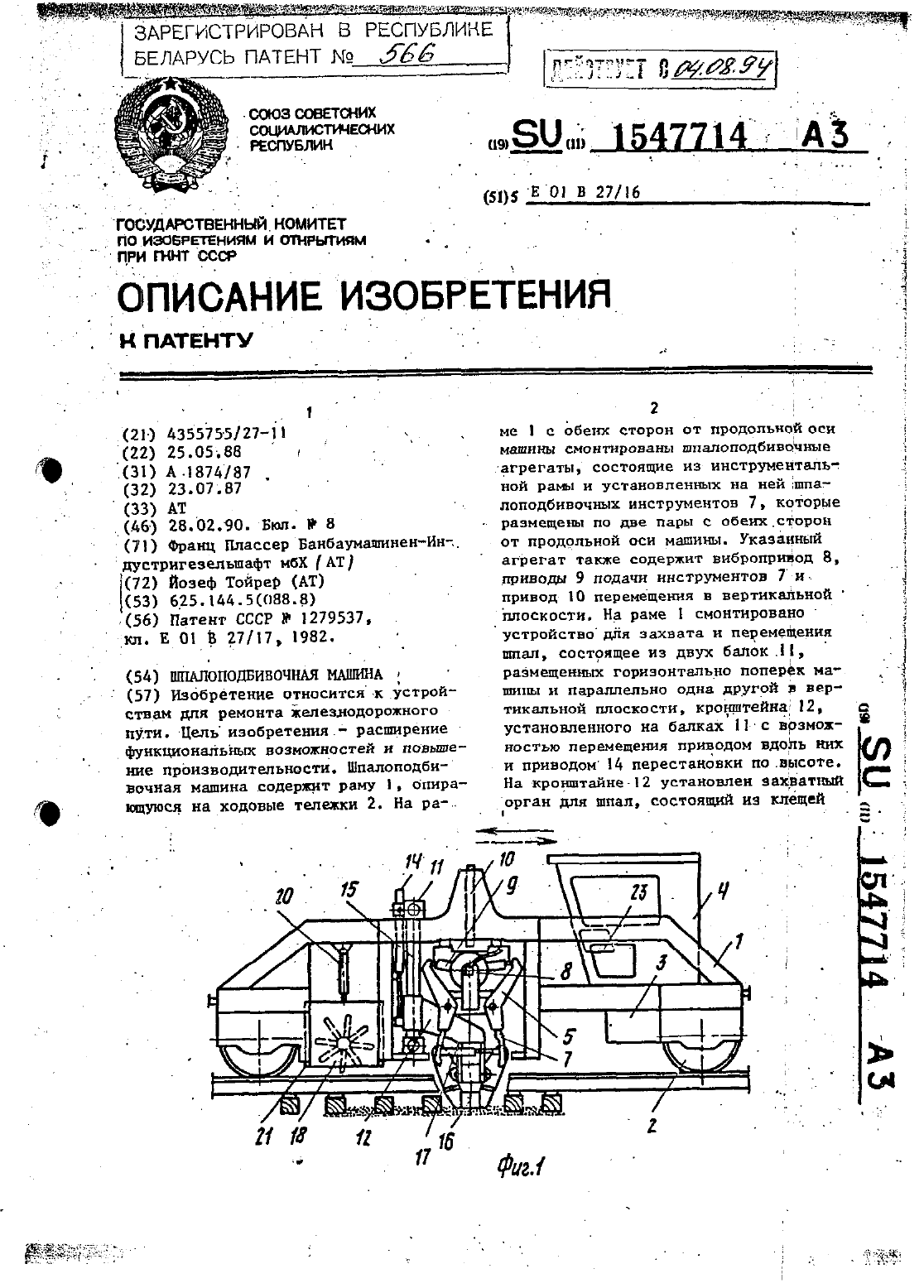
Номер патента: 566
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/16
Метки: шпалоподбивочная, машина
Текст:
...не будет выдвинута нз.путн нас.эонтально поперек машиы в параллелъ Н только, чтобы е можно было беслрет г но одна другой в вертикальной плес- пятственво убрать-путевым рабочим. кости, кронштейна 12, установленного 5 На.местоиэвлеченной шпалы сразу может на балках 11 Йс возможностью перемеще 4 быть установлена новая шпала. Эта 1 щпа ния приводом 13 вдоль них и приводом ла путевым рабочим вдвигается на мес-16 перестановки по высоте. С...
Шпалоподбивочная машина
Номер патента: 554
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/16
Метки: шпалоподбивочная, машина
Текст:
...и шпалы, подаются независимо друг от друга в зависимостиОТ СОСТОЯНИЯ ЗЛЛНСТЗ, НО ПРИ ЭТОМ на пластины 16 подбоек 11-14 действует одна н та же сила подачи. На подбойки 11-14 вибрация также передается НЗЗЕНСИМО ДРУГ ОТ ДРУГа Внижней части на фиг.1 пунктирными линиями показаны различные условияВ Которьж работают подбойки. В средней части показано уплотнение баллас та с обеих сторон шпалы 34 при рыщ лом и равномерно распределенном балласте...
Предыдущий патент: Трансдермальная терапевтическая система и способ ее получения
Следующий патент: Асинхронный электродвигатель
Случайный патент: Способ спекания на агломерационной машине