Способ управления приводом машины
Номер патента: 5361
Опубликовано: 30.09.2003
Авторы: Гинзбург Александр Анатольевич, Сиротин Сергей Константинович
Текст
05 13/02 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ МАШИНЫ(71) Заявитель Республиканское унитарное предприятие Головное специальное конструкторско-технологическое бюро гидроаппаратуры с опытно-экспериментальным производством(72) Авторы Гинзбург Александр Анатольевич Сиротин Сергей Константинович(73) Патентообладатель Республиканское унитарное предприятие Головное специальное конструкторско-технологическое бюро гидроаппаратуры с опытно-экспериментальным производством(57) 1. Способ управления приводом машины, заключающийся в регулировании параметров движения по меньшей мере двух рабочих органов привода машины посредством соответствующих управляющих устройств в зависимости от величин задающих воздействий,отличающийся тем, что задающие воздействия подают на входы корректирующих звеньев, выходы которых связаны со входами соответствующих управляющих устройств рабочими органами привода машины, при этом величина сигналов на входах управляющих устройств не превышает величину заранее установленного уровня задающего воздействия 0 и удовлетворяет соотношению,1 ,где- величина сигнала на входе -го управляющего устройства- коэффициент передачи, определяющий соотношение между величиной задающего воздействия и величиной сигнала на входе -го управляющего устройства- величина задающего воздействия, определяющая величину управляющего сигнала на -м управляющем устройстве- количество рабочих органов. 2. Способ по п. 1, отличающийся тем, что устанавливают 1, при 4. Способ по п. 1, отличающийся тем, что 0 устанавливают равным максимальной величине задающего воздействия, при которой обеспечивается регулирование параметра движения по меньшей мере одного рабочего органа привода машины при условии равен 5361 1 ства нулю значений задающих воздействий, в соответствии с которыми осуществляется регулирование параметров других рабочих органов. 5. Способ по п. 1, отличающийся тем, что 0 устанавливают равным максимальной величине задающих воздействий, при которых обеспечивается одновременное регулирование параметров движения любых рабочих органов привода машины при условии равенства нулю значений задающих воздействий, в соответствии с которыми осуществляется регулирование параметров остальных рабочих органов.(56) Экскаватор одноковшовый ЭО-3532. Техническое описание и инструкция по эксплуатации, 1992. Изобретение относится к области автоматики и может быть использовано в приводах машин. Известны и широко применяются приводы машин, содержащие несколько рабочих органов и устройства, регулирующие параметр движения соответствующего рабочего органа в соответствии с некоторым задающим воздействием со стороны оператора или системы управления. Примером подобного привода может служить, в частности, гидравлический привод экскаватора 1, в котором имеется несколько рабочих органов, причем параметр движения каждого из них - в данном случае, скорость для гидроцилиндров и угловая скорость для гидромоторов, - регулируется пропорциональными гидрораспределителями с гидравлическим управлением. Задающим воздействием для каждого из них является давление управления, вырабатываемое блоками управления. Недостаток подобных систем проявляется при регулировании максимальных параметров движения рабочих органов, поскольку в таких управляющих системах на величины задающих воздействий не накладывается специальных ограничений. При этом в случае одновременного регулирования движения нескольких рабочих органов возможен случай,при котором ресурсы источника или источников (например, мощность привода или, в приведенном случае, суммарная подача насосов) окажутся недостаточными для поддержания параметров движения, соответствующих настроенным на всех одновременно функционирующих управляющих устройствах, что соответствует насыщению системы управления. При этом регулирование становится неэффективным, поскольку невозможно удовлетворительным образом разделить ресурсы системы между потребителями, что приводит, как правило, к потере однозначности соответствия между задающим воздействием и регулируемым параметром. Так, для приведенного привода в случае, когда сумма настроенных управляющими гидрораспределителями расходов рабочей жидкости окажется большей, чем суммарная подача насосов, скорость движения рабочих органов начнет зависеть от нагрузки и скоростей других рабочих органов, причем зависимость от управляющего воздействия может оказаться практически утраченной. Если же для предупреждения этого ограничить максимальную настройку каждого управляющего устройства, то мощность привода большую часть времени будет использоваться неэффективно, а производительность машины будет существенно ограничена. Во избежание этого необходимо, чтобы сигналы, управляющие устройствами, регулирующими параметры движения рабочих органов привода, ограничивались таким образом,чтобы их суммирование на этих устройствах не приводило к указанному выше эффекту насыщения. 5361 1 Техническим результатом изобретения является обеспечение возможности регулирования параметров движения рабочих органов независимо от величин задающих воздействий и расширение диапазона регулирования параметров движения рабочих органов. Технический результат изобретения достигается тем, что привод машины, включающий в себя по меньшей мере два рабочих органа и управляющие устройства, каждое из которых регулирует параметр движения соответствующего рабочего органа в зависимости от величины задающих воздействий, дополняется корректирующими звеньями, на входы которых подаются задающие воздействия, а выходы связаны со входами соответствующих управляющих устройств рабочими органами привода машины, при этом величина сигналов на входах управляющих устройств не превышает величину заранее установленного уровня задающего воздействия 0 и удовлетворяет соотношению,1 ,где- величина сигнала на входе -го управляющего устройства- коэффициент передачи, определяющий соотношение между величиной задающего воздействия и величиной сигнала на входе -го управляющего устройства- величина задающего воздействия, определяющая величину управляющего сигнала на -м управляющем устройстве- количество рабочих органов. Поскольку соответствующий подбор коэффициентов передачии величины заранее установленного уровня задающего воздействия 0 позволяет ограничить должным образом сигналы, поступающие на входы управляющих устройств, такой способ позволяет обеспечить суммирование этих сигналов таким образом, чтобы избежать отмеченного выше эффекта насыщения. В случае, если, например, величина заранее установленного уровня задающего воздействия 0 выбрана таким образом, что в условиях, когда заведомо обеспечивается отсутствие насыщения, либо насыщение в этих условиях по тем или иным причинам не является существенным, во втором пункте формулы изобретения предусмотрена возможность такого выбора коэффициентов передачи, при котором в указанном диапазоне задающих воздействий выполняется соотношение 1 при Очевидно, что при этом корректирующие звенья в условиях отсутствия или несущественности насыщения не оказывают влияния на управление машиной. В противоположность этому, если при выполнении условия насыщение заведомо происходит или же его величина заведомо существенно сказывается на работе машины, третьим пунктом формулы изобретения предусмотрена возможность такого выбора коэффициентов передачи, при котором в указанном диапазоне задающих воздействий выполняется соотношение В этом случае всегда можно добиться, чтобы при одновременной работе любого количества рабочих органов сохранялась возможность эффективного регулирования за счет 3 5361 1 сохранения запаса ресурсов источника (источников), которые могут быть дополнительно распределены между рабочими органами при управлении параметрами их движения. В самом деле, легко видеть, что сумма управляющих сигналов на рабочих органах всегда является ограниченной и никогда не превосходит установленного уровня задающих воздействий 0, поскольку выполняется соотношение Таким образом, изменением величины 0 всегда можно ограничить сумму управляющих воздействий на рабочих органах, что позволяет соответствующим подбором этой величины обеспечить ограничение параметров движения рабочих органов, при котором возможно их регулирование, не приводящее к насыщению. В четвертом пункте формулы изобретения конкретизирован один из вариантов выбора уровня задающего воздействия. Уровень задающего воздействия 0 выбирается равным максимальной величине задающего воздействия, при которой обеспечивается регулирование параметра движения по меньшей мере одного рабочего органа при условии равенства нулю значений задающих воздействий, в соответствии с которыми осуществляется регулирование параметров других рабочих органов, то есть сигналу, соответствующему верхней границе максимального из диапазонов регулирования управляющих устройств системы. При этом сумма величин управляющих сигналов на рабочих органах в любом случае не превышает этого уровня. Такой выбор позволяет наиболее полно использовать устройство или устройства с самыми широкими диапазонами регулирования, но не исключает возможности возникновения насыщения при одновременной работе устройств с меньшими диапазонами. В пятом пункте формулы приводится другой вариант выбора уровня задающего воздействия, при котором уровень задающего воздействия 0 выбирается равным максимальной величине задающих воздействий, при которых обеспечивается одновременное регулирование параметров движения любых рабочих органов при условии равенства нулю значений задающих воздействий, в соответствии с которыми осуществляется регулирование параметров остальных рабочих органов, то есть сигналу, соответствующему верхней границе минимального из диапазонов регулирования управляющих устройств системы. Такой выбор позволяет наиболее полно исключить опасность возникновения насыщения при одновременной работе любых устройств, но ограничивает диапазоны регулирования величиной 0. Источники информации 1. Экскаватор одноковшовый ЭО-3532. Техническое описание и инструкция по эксплуатации. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G05B 13/02, F15B 5/00
Метки: машины, способ, приводом, управления
Код ссылки
<a href="https://by.patents.su/4-5361-sposob-upravleniya-privodom-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ управления приводом машины</a>
Способ управления электромеханическим приводом машин
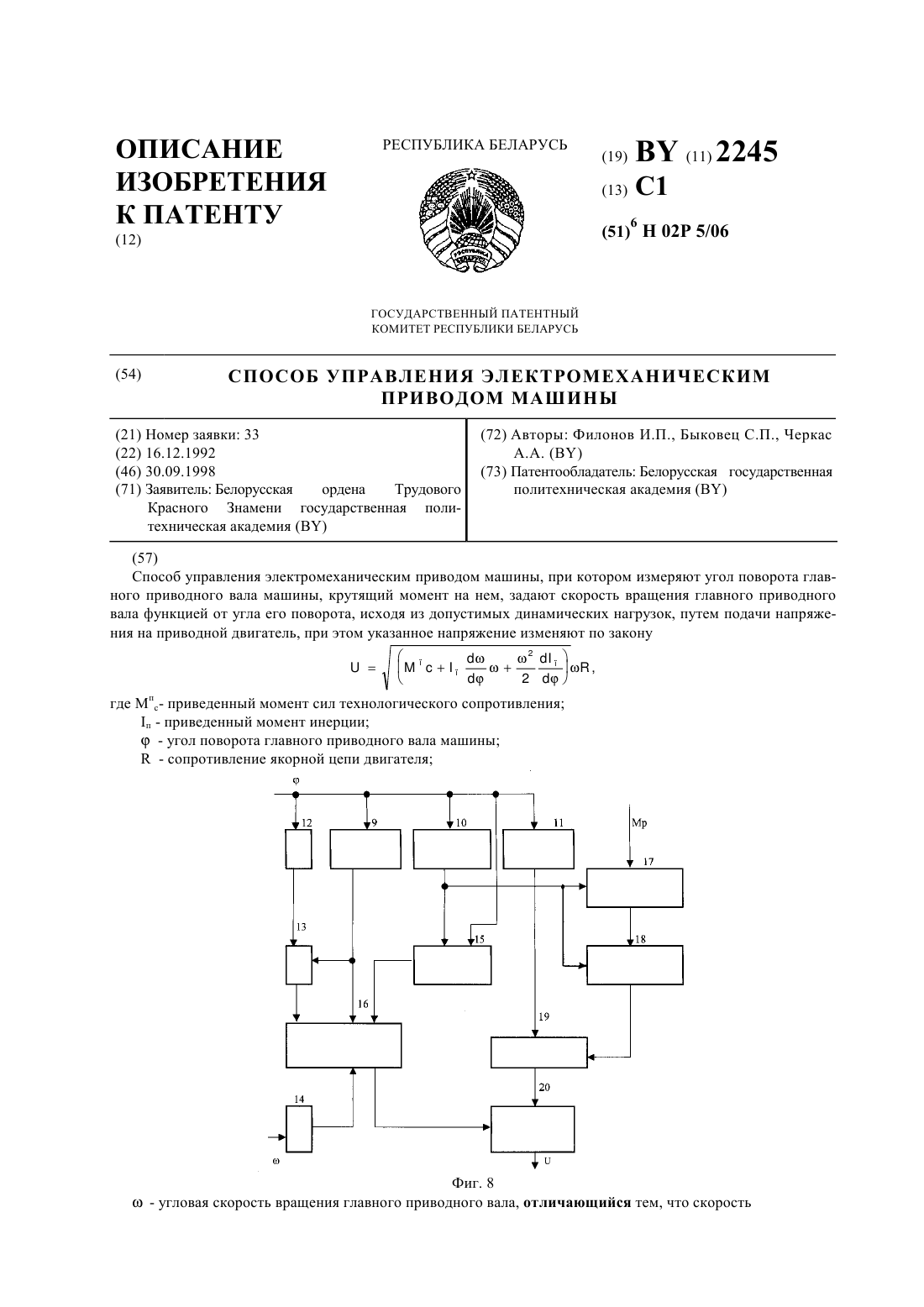
Номер патента: 2245
Опубликовано: 30.09.1998
Авторы: Филонов И. П., Черкас А. А., Быкевец С. П.
МПК: H02P 5/06
Метки: машин, приводом, управления, электромеханическим, способ
Текст:
...скоростиот нуля до ср главного приводного вала машины. 2 и, определяющие суммарное значение привеНа фигуре 5 представлены зависимости,2 денного моментадвижущих сил в функции углаповорота главного приводного вала машины. На фи гуре 6 приведена зависимость, полученная как сумма составляющих, изображенных на фигуре 5. На фиг. 7 представлена структурная схема системы управления, включающая вычислитель 1, регулятор 2,двигатель 3, датчика 4...
Способ управления электрическим приводом токарного станка
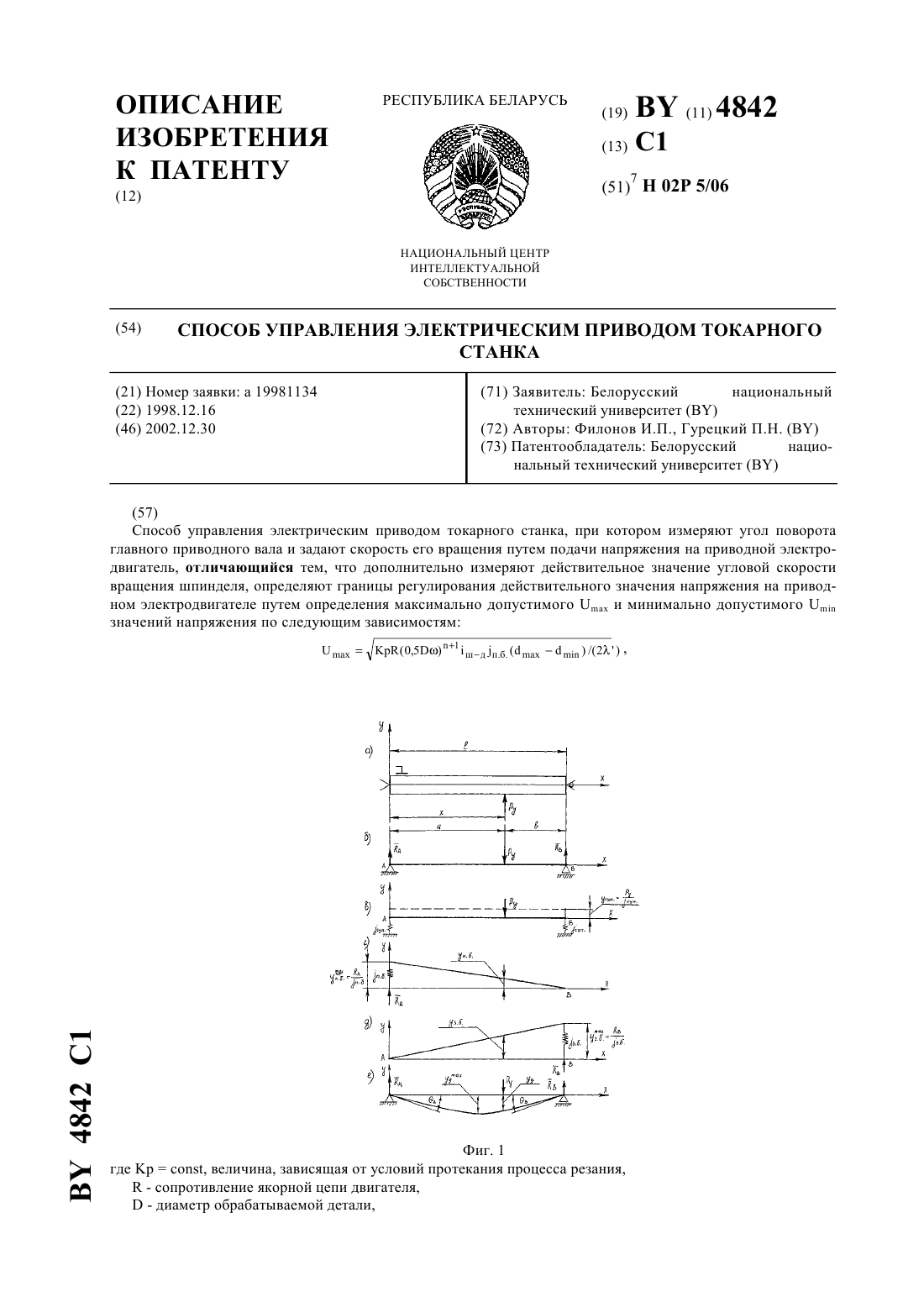
Номер патента: 4842
Опубликовано: 30.12.2002
Авторы: Филонов Игорь Павлович, Гурецкий Павел Николаевич
МПК: H02P 5/06
Метки: приводом, токарного, способ, станка, управления, электрическим
Текст:
...деформацией детали, положены условия закрепления, отражающие обработку в центрах. С геометрической точки зрения это значит, что изогнутая ось проходит через заданные в системе координат ХУ точки А и В, имея заданное направление. Для двух опорных балок в независимости от места расположения опор условие закрепления можно записать в виде 1) при ХХА 0 У(ХА)0 2) при ХХВ У(ХВ)0. Следовательно, изогнутая ось детали представляет собой...
Система управления положением корпуса гусеничной машины
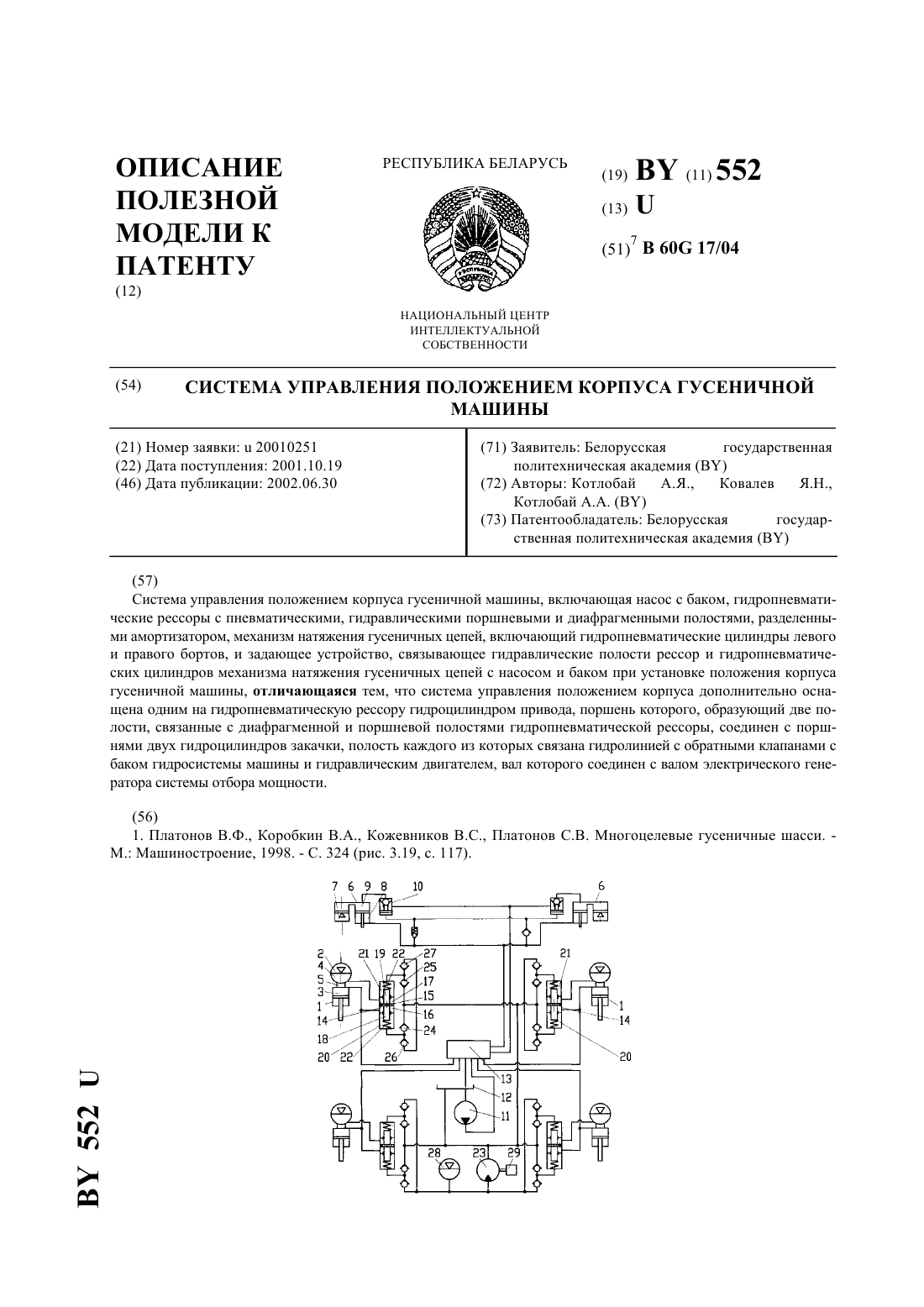
Номер патента: U 552
Опубликовано: 30.06.2002
Авторы: Котлобай Анатолий Яковлевич, Ковалев Ярослав Никитич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: система, машины, гусеничной, управления, положением, корпуса
Текст:
...цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 6 с пневматической 7, гидравлической штоковой 8 и поршневой 9 полостями. Поршневые полости 9 заперты гидрозамками 10. Гидравлические полости 3, 4 гидропневматических рессор 1, 8 гидропневматического цилиндра 6, напорные полости гидрозамков 10 связаны с насосом 11 и баком 12...
Система управления положением корпуса гусеничной машины
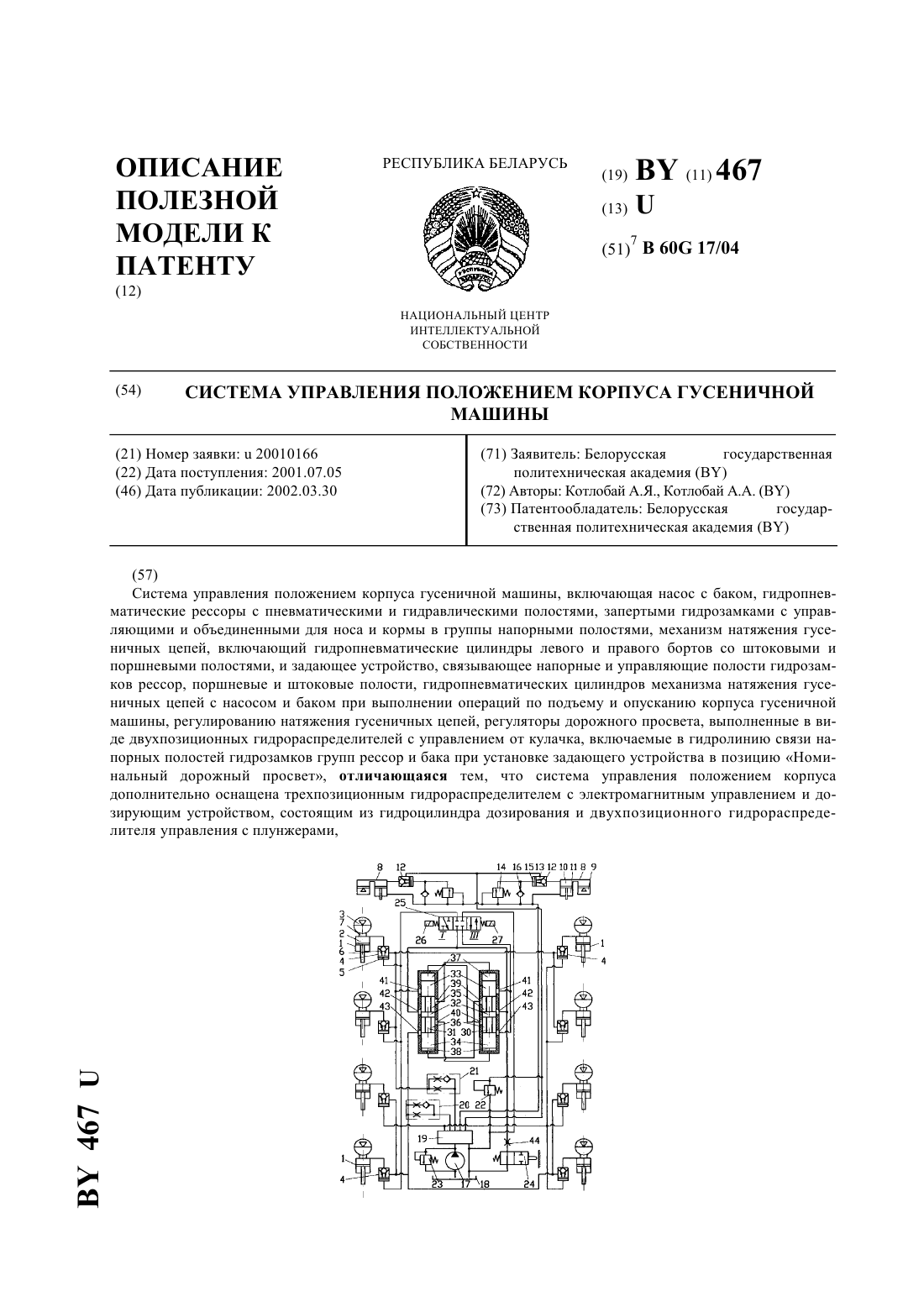
Номер патента: U 467
Опубликовано: 30.03.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: корпуса, управления, система, гусеничной, положением, машины
Текст:
...дозирования объемов рабочей жидкости, закачиваемой в гидравлические полости 2 рессор 1, система управления положением корпуса гусеничной машины дополнительно оснащена трехпозиционным гидрораспределителем 25 с электромагнитным управлением посредством электромагнитов 26, 27 и дозирующим устройством, конструктивная схема которого позволяет работу в режимах сумматора и делителя потоков. Дозирующее устройство состоит из одинаковых по конструктивной...
Система управления положением корпуса гусеничной машины
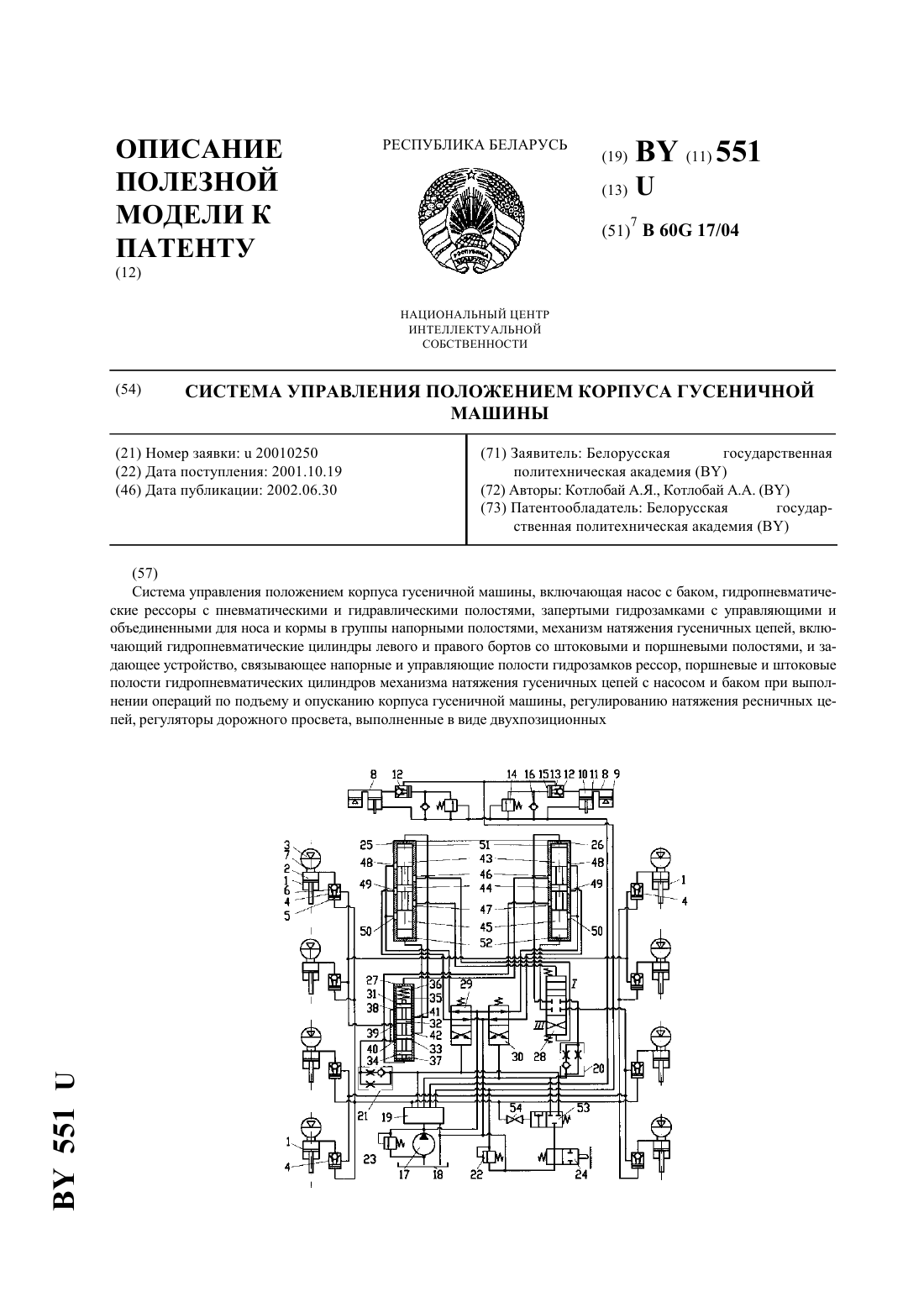
Номер патента: U 551
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: управления, система, положением, машины, корпуса, гусеничной
Текст:
...к гидрозамкам 4 рессор 1 передней группы, открывает их и поступает в полости 2. После достижения плунжером гидроцилиндра дозирования 25 крайнего положения (на чертеже нижнего) жидкость от насоса 17 через двухпозиционный гидрораспределитель переключения 29 (во второй позиции его), каналы 49, 46 гидроцилиндра дозирования 25 поступает в торцевую управляющую полость (на чертеже нижнюю) гидрораспределителя управления 28. Вторая торцевая...
Предыдущий патент: Способ акупунктурной диагностики и лечения и устройство для его осуществления
Следующий патент: Устройство генерирования тока электретом
Случайный патент: Набор элементов для сборки электрических цепей