Устройство для определения угловых перемещений

Текст
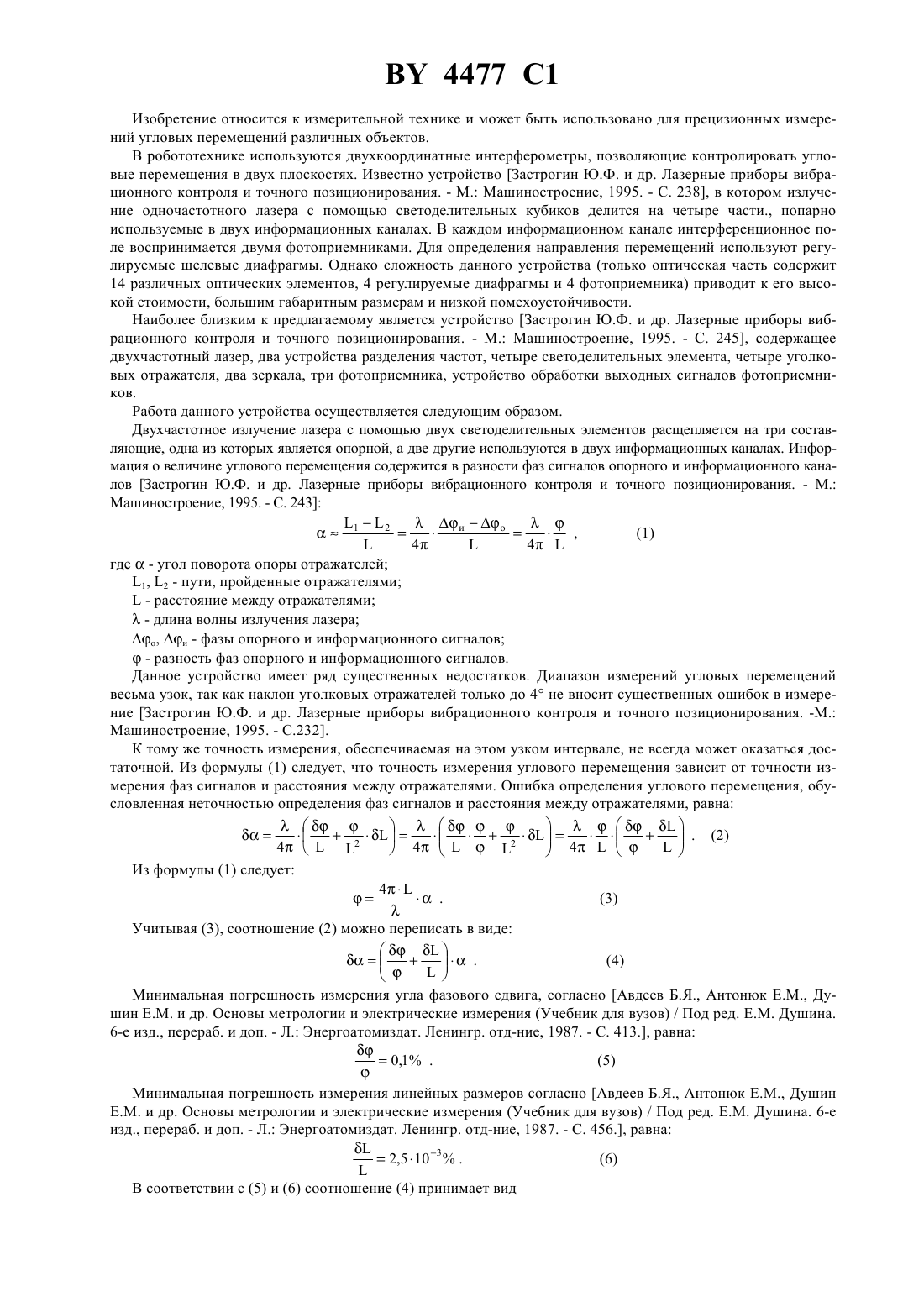
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ(71) Заявитель Белорусская государственная политехническая академия(73) Патентообладатель Белорусская государственная политехническая академия(57) Устройство для определения угловых перемещений, содержащее двухчастотный лазер, отражатель, фотоприемник, отличающееся тем, что в него введены фазовая анизотропная пластинка, закрепленная на двух приводах и связанная с объектами, угловые перемещения которых необходимо измерить, поляризатор, экстремальная система регулирования, система обработки информации, причем фотоприемник расположен на оптической оси лазера, поляризатор расположен между лазером и фотоприемником, фазовая анизотропная пластинка расположена между лазером и отражателем, первый вход экстремальной системы регулирования соединен с фотоприемником, первый и второй выходы экстремальной системы регулирования соединены с приводами фазовой анизотропной пластинки, второй вход и третий выход экстремальной системы регулирования соединены соответственно с выходом и входом системы обработки информации.(56) Застрогин Ю.Ф. и др. Лазерные приборы вибрационного контроля и точного позиционирования. - М. Машиностроение, 1995. - С. 245-246.2133451 С 1, 1999. 4477 1 Изобретение относится к измерительной технике и может быть использовано для прецизионных измерений угловых перемещений различных объектов. В робототехнике используются двухкоординатные интерферометры, позволяющие контролировать угловые перемещения в двух плоскостях. Известно устройство Застрогин Ю.Ф. и др. Лазерные приборы вибрационного контроля и точного позиционирования. - М. Машиностроение, 1995. - С. 238, в котором излучение одночастотного лазера с помощью светоделительных кубиков делится на четыре части., попарно используемые в двух информационных каналах. В каждом информационном канале интерференционное поле воспринимается двумя фотоприемниками. Для определения направления перемещений используют регулируемые щелевые диафрагмы. Однако сложность данного устройства (только оптическая часть содержит 14 различных оптических элементов, 4 регулируемые диафрагмы и 4 фотоприемника) приводит к его высокой стоимости, большим габаритным размерам и низкой помехоустойчивости. Наиболее близким к предлагаемому является устройство Застрогин Ю.Ф. и др. Лазерные приборы вибрационного контроля и точного позиционирования. - М. Машиностроение, 1995. - С. 245, содержащее двухчастотный лазер, два устройства разделения частот, четыре светоделительных элемента, четыре уголковых отражателя, два зеркала, три фотоприемника, устройство обработки выходных сигналов фотоприемников. Работа данного устройства осуществляется следующим образом. Двухчастотное излучение лазера с помощью двух светоделительных элементов расщепляется на три составляющие, одна из которых является опорной, а две другие используются в двух информационных каналах. Информация о величине углового перемещения содержится в разности фаз сигналов опорного и информационного каналов Застрогин Ю.Ф. и др. Лазерные приборы вибрационного контроля и точного позиционирования. - М. Машиностроение, 1995. - С. 2432 ио 1 4 где- угол поворота опоры отражателей 1, 2 - пути, пройденные отражателями- расстояние между отражателями- длина волны излучения лазера о, и - фазы опорного и информационного сигналов- разность фаз опорного и информационного сигналов. Данное устройство имеет ряд существенных недостатков. Диапазон измерений угловых перемещений весьма узок, так как наклон уголковых отражателей только до 4 не вносит существенных ошибок в измерение Застрогин Ю.Ф. и др. Лазерные приборы вибрационного контроля и точного позиционирования. -М. Машиностроение, 1995. - С.232. К тому же точность измерения, обеспечиваемая на этом узком интервале, не всегда может оказаться достаточной. Из формулы (1) следует, что точность измерения углового перемещения зависит от точности измерения фаз сигналов и расстояния между отражателями. Ошибка определения углового перемещения, обусловленная неточностью определения фаз сигналов и расстояния между отражателями, равна Минимальная погрешность измерения угла фазового сдвига, согласно Авдеев Б.Я., Антонюк Е.М., Душин Е.М. и др. Основы метрологии и электрические измерения (Учебник для вузов) / Под ред. Е.М. Душина. 6-е изд., перераб. и доп. - Л. Энергоатомиздат. Ленингр. отд-ние, 1987. - С. 413., равна Минимальная погрешность измерения линейных размеров согласно Авдеев Б.Я., Антонюк Е.М., Душин Е.М. и др. Основы метрологии и электрические измерения (Учебник для вузов) / Под ред. Е.М. Душина. 6-е изд., перераб. и доп. - Л. Энергоатомиздат. Ленингр. отд-ние, 1987. - С. 456., равна(7) Кроме того, оптическая часть устройства содержит 19 элементов, что ведет к низкой помехоустойчивости, большим габаритным размерам и высокой стоимости устройства. Задача, решаемая изобретением, заключается в снятии пределов измеряемых угловых перемещений, повышении точности измерений и значительном упрощении оптической схемы устройства. Для решения этой задачи в устройство для определения угловых перемещений, содержащее двухчастотный лазер, отражатель, фотоприемник, введены фазовая анизотропная пластинка (ФАП), закрепленная на двух приводах и связанная с объектами, угловые перемещения которых необходимо измерить, поляризатор,экстремальная система регулирования, система обработки информации, причем фотоприемник расположен на оптической оси лазера, поляризатор расположен между лазером и фотоприемником, ФАП расположена между лазером и отражателем, первый вход экстремальной системы регулирования соединен с фотоприемником, первый и второй выходы экстремальной системы регулирования соединены с приводами ФАП, второй вход и третий выход экстремальной системы регулирования соединены соответственно с выходом и входом системы обработки информации. Угол поворота определяется по формуле где- компенсирующий сигнал на приводе ФАП- компенсирующий сигнал, соответствующий повороту на единицу измерения угла. Из выражения (8) следует, что точность измерения углового перемещения зависит от точности измерения напряжения на приводе ФАП. Абсолютная ошибка определения перемещения, обусловленная неточностью определения величины напряжения на приводе ФАП, равна.2 Относительная ошибка определения перемещения, обусловленная неточностью определения величины напряжения на приводе ФАП равна Для цифровых приборов, используемых при измерении постоянных напряжений, погрешность измерений согласно Авдеев Б.Я., Антонюк Е.М., Душин Е.М. и др. Основы метрологии и электрические измерения(12)510 5. Заявляемое изобретение обеспечивает получение нескольких технических результатов. Приведенные выше расчеты свидетельствуют о возможности повышения точности измерения угловых перемещений. Снимаются все ограничения на пределы измерения угловых перемещений. Значительное упрощение оптической схемы устройства (было 12 оптических элементов, стало - 3) влечет за собой увеличение помехоустойчивости устройства и уменьшение его габаритных размеров в несколько раз. Сущность изобретения поясняется принципиальной схемой устройства для определения угловых перемещений. Устройство содержит лазер 1, генерирующий две ортогонально поляризованные волны, ФАП 2, закрепленную на приводах 3 и 4 и связанную с объектами, угловые перемещения которых необходимо измерять,отражатель 5, поляризатор 6 с осью пропускания, ориентированной под углом 45 к азимутам поляризации генерируемых волн, фотоприемник 7, расположенный на оптической оси лазера 1 и отражателя 5, экстремальную систему регулирования (ЭСР) 8, систему обработки информации (СОИ) 9. Первый вход ЭСР 8 соединен с фотоприемником 7, первый и второй выходы ЭСР 8 соединены с приводами 3 и 4, второй вход и третий выход ЭСР 8 соединен с выходом и входом СОИ 9. Работа устройства осуществляется следующим образом. Зеркала лазера 1 и отражатель 5 образуют линейный трехзеркальный анизотропный резонатор. Отражателем может служить сферическое зеркало или уголковый отражатель. Повороты фазовой анизотропной пластинки, находящейся в пассивной части резонатора, вокруг оптической оси резонатора (ось Х на схеме) и вокруг оси, перпендикулярной к оптической оси резонатора (осьна схеме), приводит к модуляции частоты биений между ортогонально поляризованными волнами лазерного излучения Зуйков И.Е., Куцак А.А., Тузков Ю.Ф., Зуйкова Н.В. Частотные характеристики линейного двух 4477 1 модового лазера с анизотропными связанными резонаторами // Прикладная спектроскопия. - Т. 66, 1999. - С. 565-568. При измерении углового перемещения, совершаемого вокруг оптической оси резонатора, ФАП 2 удерживается с помощью ЭСР 8 в положении, соответствующем экстремуму сигнала частоты биений на фотоприемнике 7. В качестве ЭСР может быть использована любая, известная в настоящее время. При повороте ФАП 2 вокруг оптической оси резонатора ЭСР 8 компенсирует это перемещение путем изменения напряжения на приводе 3. В качестве привода можно использовать магнитоэлектрический двигатель. Угол поворота определяется по формуле (8). Измерение углового перемещения вокруг оси, перпендикулярной оптической оси резонатора производится аналогично, только в этом случае ЭСР 8 компенсирует перемещение путем изменения напряжения на приводе 4. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G01B 9/00
Метки: определения, устройство, перемещений, угловых
Код ссылки
<a href="https://by.patents.su/4-4477-ustrojjstvo-dlya-opredeleniya-uglovyh-peremeshhenijj.html" rel="bookmark" title="База патентов Беларуси">Устройство для определения угловых перемещений</a>
Устройство для определения линейных и угловых перемещений
Номер патента: 4265
Опубликовано: 30.12.2001
Авторы: Куцак Алексей Андреевич, Зуйков Игорь Евгеньевич, Тузков Юрий Фадеевич
МПК: G01B 9/00
Метки: линейных, определения, перемещений, угловых, устройство
Текст:
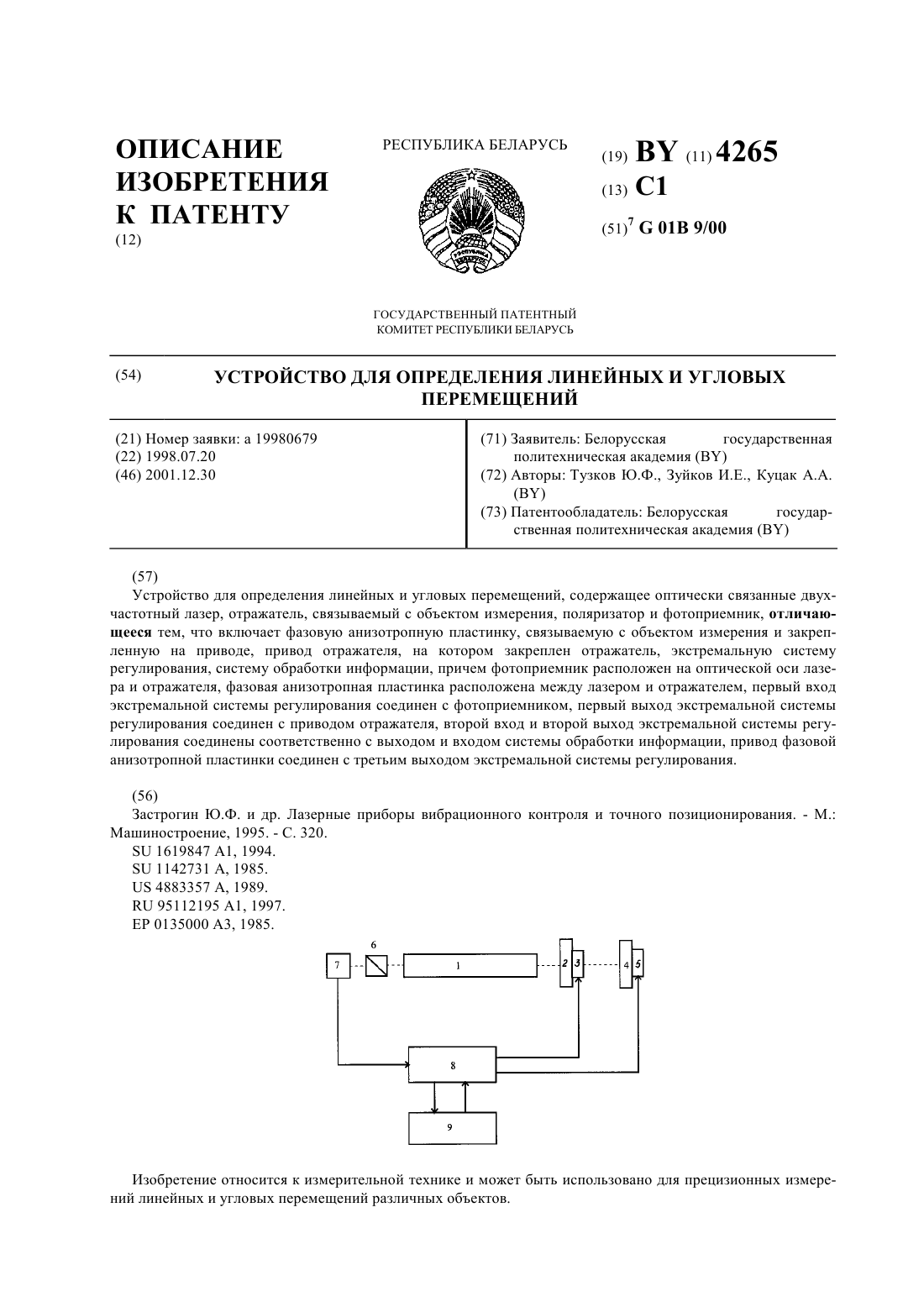
...измерения и закрепленная на приводе, привод отражателя, на котором закреплен отражатель, экстремальная система регулирования, система обработки информации, причем фотоприемник расположен на оптической оси лазера и отражателя, ФАП расположена между лазером и отражателем, первый вход экстремальной системы регулирования соединен с фотоприемником, первый выход экстремальной системы регулирования соединен с приводом отражателя, второй вход и...
Способ определения перемещений и устройство для его реализации
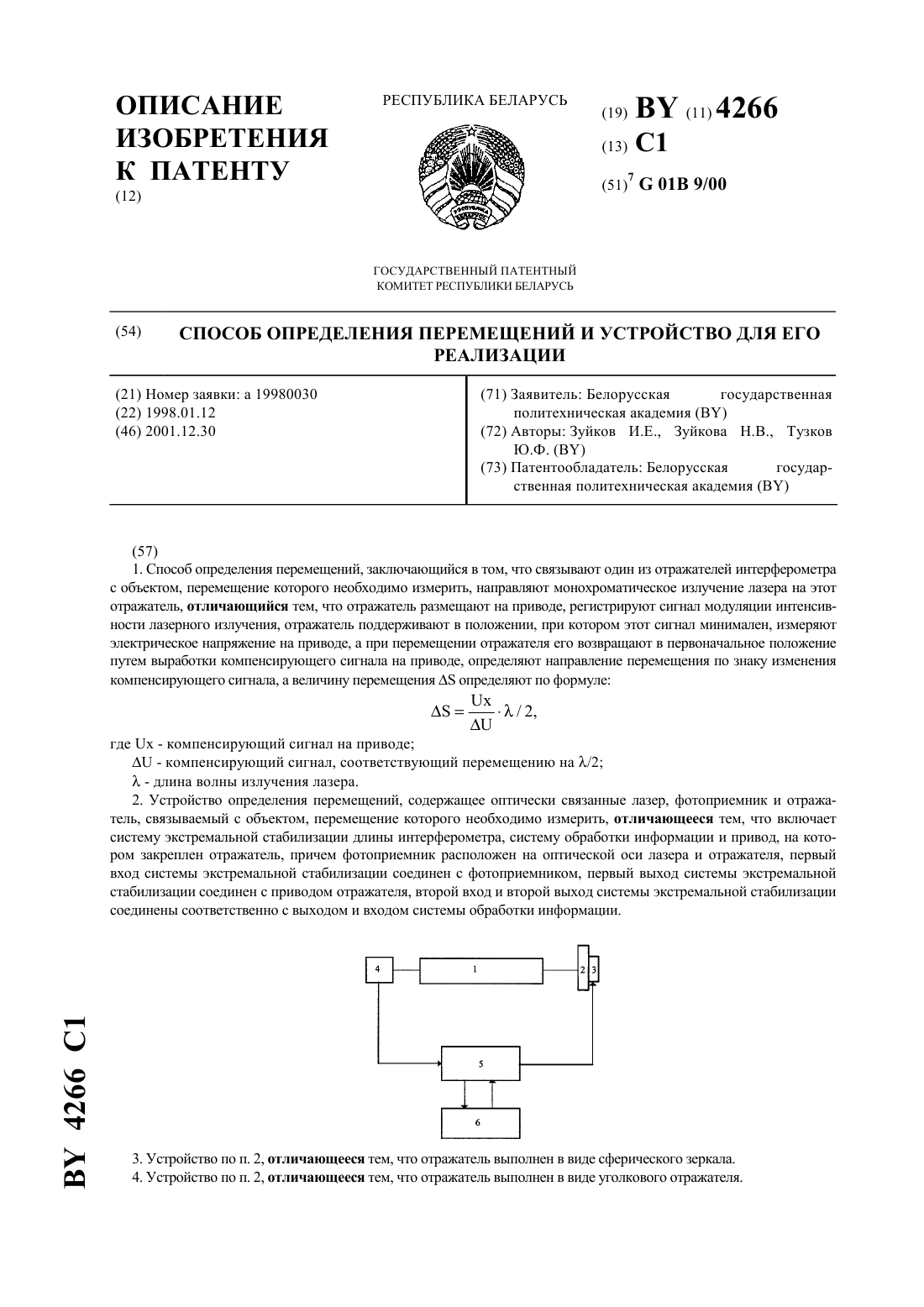
Номер патента: 4266
Опубликовано: 30.12.2001
Авторы: Тузков Юрий Фадеевич, Зуйков Игорь Евгеньевич, Зуйкова Наталья Васильевна
МПК: G01B 9/00
Метки: перемещений, устройство, определения, реализации, способ
Текст:
...того, при наличии вибрационных возмущений даже небольшой амплитуды данные способ и устройство являются неработоспособными. Заявляемое изобретение направлено на повышение точности измерения перемещений и упрощение способа определения направления перемещения. Для решения этих задач в способе определения перемещений, заключающемся в том, что связывают один из отражателей интерферометра с объектом, перемещение которого необходимо измерить, и...
Устройство для измерения перемещений объекта
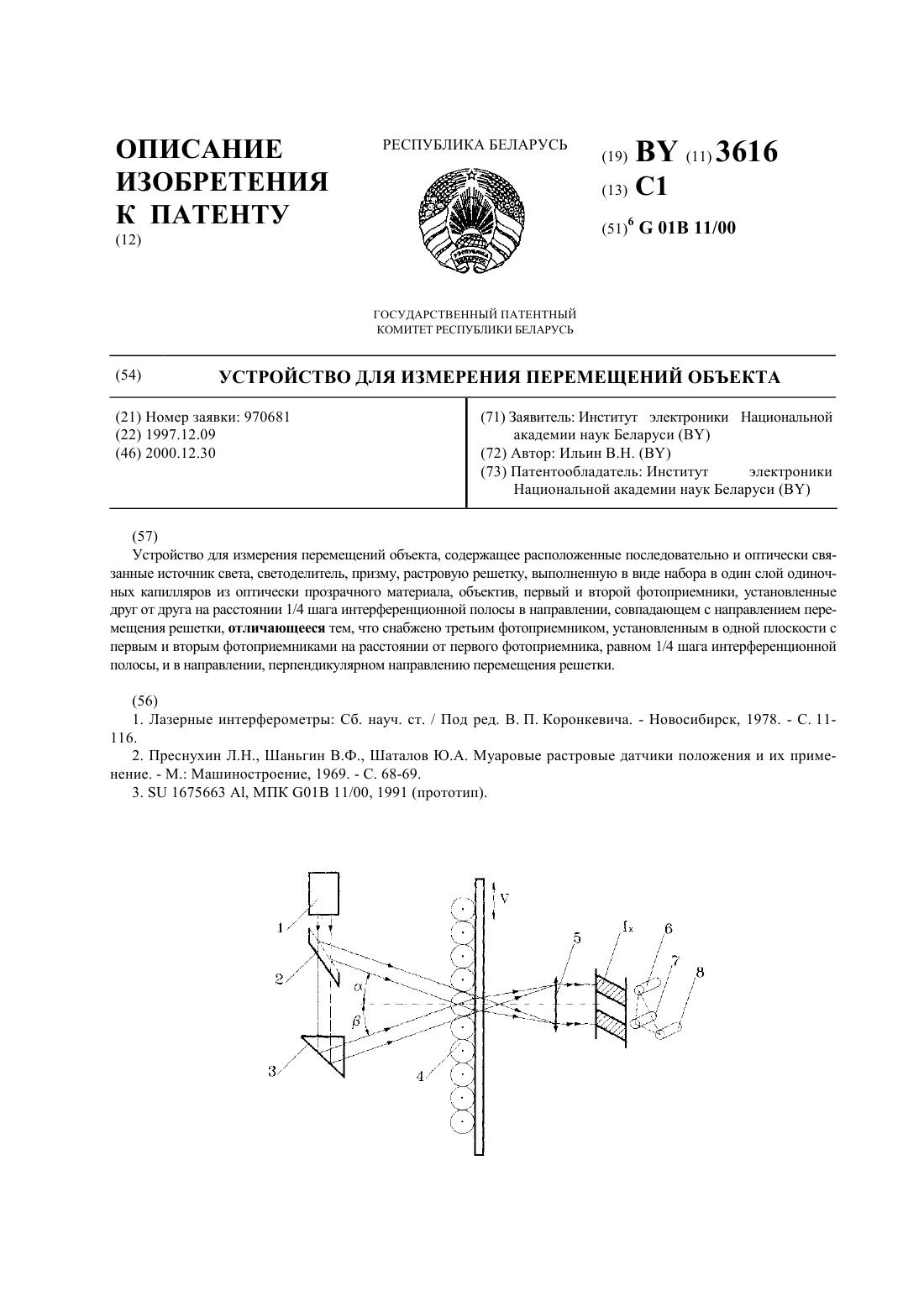
Номер патента: 3616
Опубликовано: 30.12.2000
Автор: Ильин Виктор Николаевич
МПК: G01B 11/00
Метки: объекта, измерения, перемещений, устройство
Текст:
...перпендикулярном направлению перемещения решетки. За счет введения третьего фотоприемника, установленного выше изложенным образом, удается полностью скомпенсировать ошибки, возникающие в случае перекоса растровой решетки на измерительной позиции в процессе ее движения. Фотоприемники, один из которых, например первый, принимается за опорный, а два других за измерительные,считывают текущие фазы интерференционной полосы соответственно...
Фотоэлектрический преобразователь перемещений
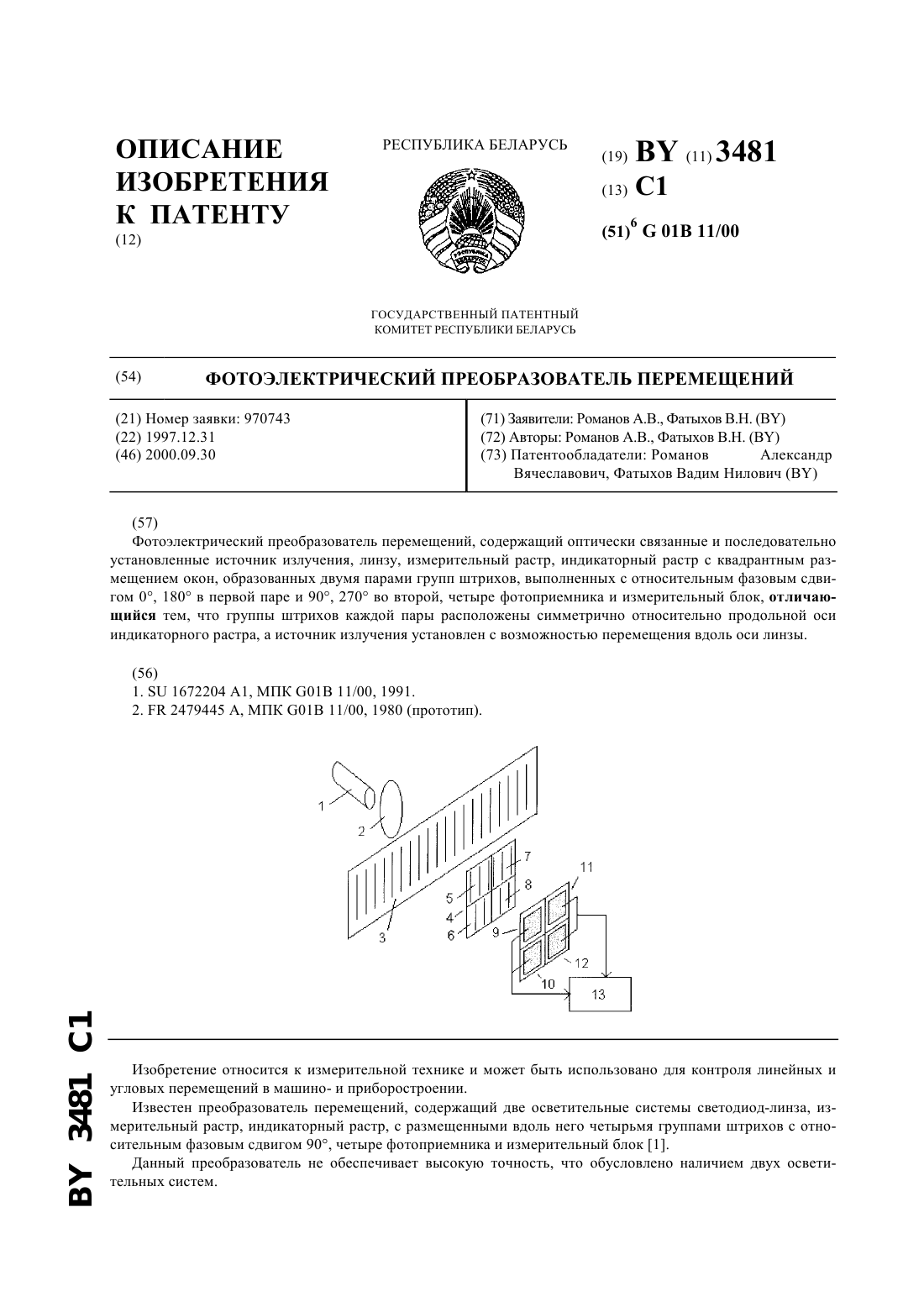
Номер патента: 3481
Опубликовано: 30.09.2000
Авторы: Романов Александр Вячеславович, Фатыхов Вадим Нилович
МПК: G01B 11/00
Метки: фотоэлектрический, преобразователь, перемещений
Текст:
...линза, 3 - измерительный растр, 4 - индикаторный растр, 58 - окна индикаторного растра, 912 - фотоприемники, 13 измерительный блок. Устройство содержит последовательно установленные и оптически связанные источник излучения 1,линзу 2, измерительный растр 3, индикаторный растр 4 с окнами 5-8, четыре фотоприемника 9-12, измерительный блок 13. Источник излучения 1, линза 2, измерительный растр 3, индикаторный растр 4, фотоприемники 9-12...
Способ получения угловых профилей на непрерывных станах
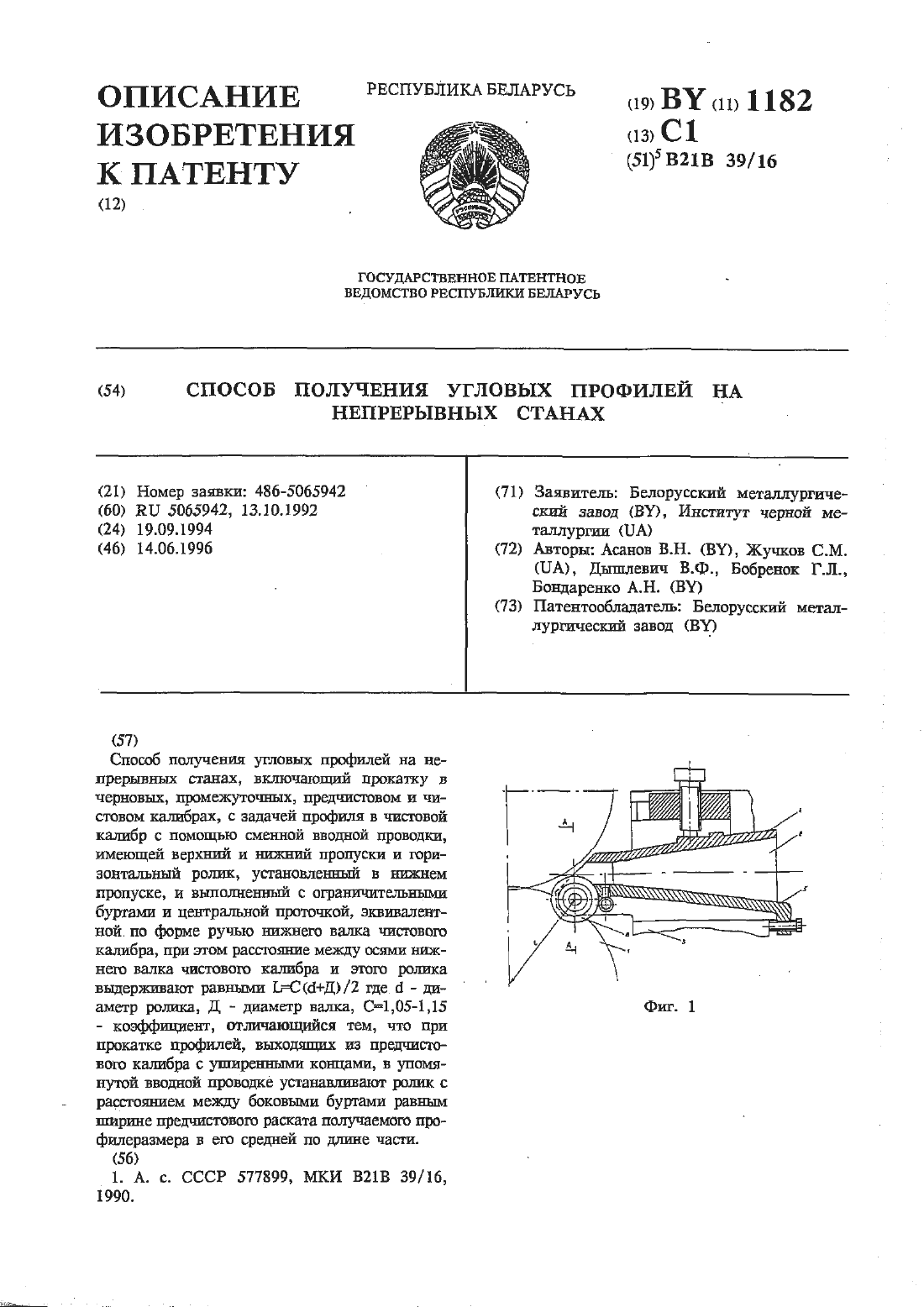
Номер патента: 1182
Опубликовано: 14.06.1996
Авторы: Жучков Сергей Михайлович, Бобренок Геннадий Людвигович, Дышлевич Виктор Федорович, Асанов Валерий Николаевич, Бондаренко Александр Николаевич
МПК: B21B 39/16
Метки: получения, непрерывных, способ, станах, профилей, угловых
Текст:
...сбоку), на фиг. 2 - сечение по А-А на фит. 1, на фиг. 3 - схема взаимодействия предчистового раската с горизонтальным ролшсом проводки чистовой прокатной КИСТИ.Способ осуществляется следующим образом.ИЗ нагретой ЗЗГОТОВКИ В СИСТЕМЕ ЧВРНОВЫХ и промежуточных калибров непрерывного сортового стана формируют угловой раскат. Этот РНСКВТ ПРОКЗТЬГВЗЮТ В ПРЕДЧИСГОВОМ УГЛОВОМ калибре и задают в угловой кадпггбр чистовой прокатной клети 1 с помощью...
Предыдущий патент: Конденсатор с двойным электрическим слоем (варианты)
Следующий патент: Лазер
Случайный патент: Творожное изделие