Способ определения расстояния до объекта посредством цифровой фотокамеры
Номер патента: 17809
Опубликовано: 30.12.2013
Авторы: Васильчук Алексей Сергеевич, Козлов Владимир Леонидович
Текст
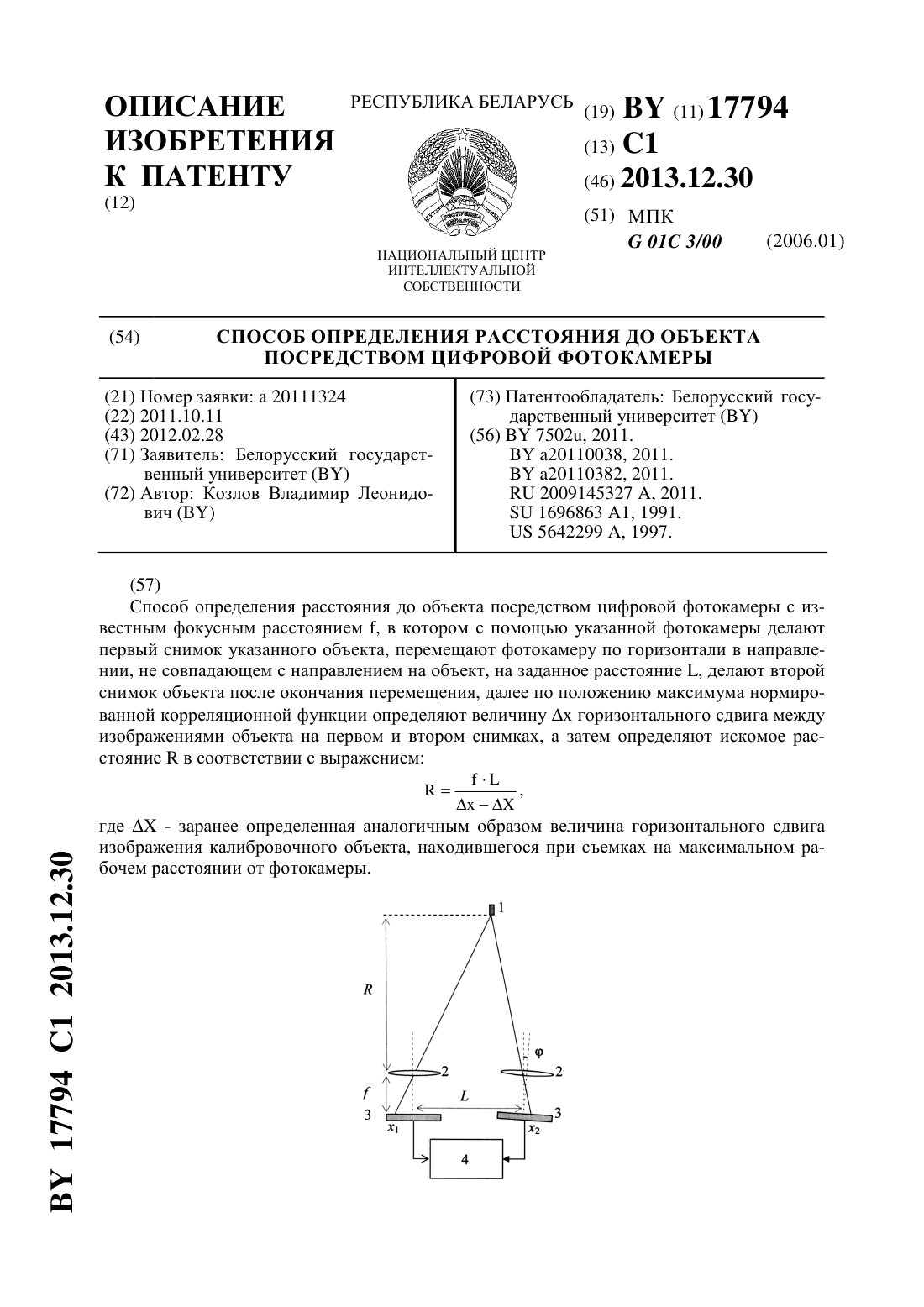
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПОСРЕДСТВОМ ЦИФРОВОЙ ФОТОКАМЕРЫ(71) Заявитель Белорусский государственный университет(72) Авторы Козлов Владимир Леонидович Васильчук Алексей Сергеевич(73) Патентообладатель Белорусский государственный университет(57) Способ определения расстояния до объекта посредством цифровой фотокамеры с известным фокусным расстоянием , в котором с помощью указанной фотокамеры делают первый снимок указанного объекта, перемещают фотокамеру в вертикальном направлении, не изменяя ориентации ее оптической оси в пространстве, на заданное расстояние ,после окончания перемещения делают второй снимок объекта, формируют на каждом из снимков по окну с одинаковыми координатами и размерамиипо горизонтали и вертикали соответственно, проводят сканирование по всем координатам (, ) точек указанных окон, определяют величинувертикального сдвига между изображениями объекта на первом и втором снимках по положению максимума нормированной корреляционной функции (, ) вида где 1 и 2 - принятые камерой сигналы в соответствующих точках окон на первом и втором снимках- горизонтальный сдвиг второго изображения относительно первого, а затем определяют искомое расстояниев соответствии с выражением Изобретение относится к области информационно-измерительных систем и предназначается для решения задач измерения дальности и линейных размеров объектов по их цифровым фотографическим изображениям. Известен способ измерения расстояний 1, использующий две цифровые фотокамеры,разнесенные в пространстве по горизонтали на известное расстояние. Дальность до объекта определяется по сдвигу между изображениями объекта. Недостатком этого устройства является низкая точность измерения дальности. Наиболее близким к предлагаемому изобретению является измеритель расстояний 2,содержащий цифровую фотокамеру, блок процессора, соединенный с блоком индикации,а также контроллер, выход которого соединен с блоком процессора, а вход соединен с цифровым выходом фотокамеры, и блок перемещения, соединенный с контроллером. Недостатком этого устройства является невозможность измерять расстояния до предметов,расположенных горизонтально, а также большое время измерения расстояний. Задача изобретения - уменьшение времени измерения расстояний и обеспечение возможности измерять расстояния до предметов, расположенных горизонтально. Поставленная задача решается путем того, что в способе определения расстояния до объекта посредством цифровой фотокамеры с известным фокусным расстоянием , в котором с помощью указанной фотокамеры делают первый снимок указанного объекта, перемещают фотокамеру в вертикальном направлении, не изменяя ориентации ее оптической оси в пространстве на заданное расстояние , после окончания перемещения делают второй снимок объекта, формируют на каждом из снимков по окну с одинаковыми координатами и размерамиипо горизонтали и вертикали соответственно, проводят сканирование по всем координатам (, ) точек указанных окон, определяют величинувертикального сдвига между изображениями объекта на первом и втором снимках по положению максимума нормированной корреляционной функции (, ) вида( ,),17809 1 2013.12.30 где 1 и 2 - принятые камерой сигналы в соответствующих точках окон на первом и втором снимках- горизонтальный сдвиг второго изображения относительно первого, а затем определяют искомое расстояниев соответствии с выражением Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя расстояний на основе цифрового фотоаппарата. Система содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, контроллер 5, процессор 6, блок перемещения фотокамеры по вертикали 7. Измеритель расстояний работает следующим образом. С помощью цифровой фотокамеры на фотоприемной матрице 4 формируется первое цифровое изображение измеряемых объектов. Затем с помощью блока перемещения 7 фотокамера передвигается в пространстве по вертикали на расстояниеи из этой точки формируется второе цифровое изображение измеряемых объектов. Перемещение осуществляется таким образом, что оптические оси камеры в обоих положениях параллельны. Полученные два цифровых изображения одних и тех же объектов поступают в процессор, где производится измерение расстояний по следующему алгоритму. На первом изображении формируется окно сканирования,размер которого выбирают таким образом, чтобы все фрагменты выделенного объекта находились на одинаковом расстоянии от фотокамеры. Это обеспечивает более высокую точность измерения расстояний. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем в процессоре осуществляется сканирование одного окна относительно другого по горизонтали и вертикали, при этом вычисляется значение двухмерной нормированной корреляционной функции между выделенными изображениями в соответствии с выражением,,где 1 - сигнал окна сканирования первого изображения 2 - сигнал окна сканирования второго изображения ,- размер сканирующего окна по горизонтали и вертикали 1, 2 ,- смещение одного изображения относительно другого по горизонтали и вертикали соответственно. Подставив (2) в (1), получаем выражение Суммы, входящие в выражение (3), можно преобразовать следующим образом 1,17809 1 2013.12.30 Из выражений (4), (5) следует, что для сигнала 1 в процессе сканирования суммы не меняются, т.к. не зависят от , .,Выражения (6), (7) пересчитывают значение суммы 2 при сдвиге окна вдоль осии осисоответственно в сторону возрастания. Первым слагаемым справа от знака равенства в обеих формулах является сумма, вычисленная на предыдущей итерации. Использование результатов предыдущей итерации обеспечивает уменьшение числа вычислительных процедур, а следовательно, уменьшение времени измерений. Аналогичные доводы и формулы будут справедливы при вычислении суммы квадратов интенсивностей 2 . Практический 2 выигрыш по времени при вычислении корреляционной функции выделенных изображений с использованием формул (3), (6), (7) по сравнению с формулами прототипа (1), (2) может составить 10 раз, что имеет существенное значение при работе системы в реальном масштабе времени. По положению максимального значения нормированной корреляционной функции (3) определяют сдвиг между изображениями по вертикали 2-1 (фигура). Так как все точки объекта в выделенном окне находятся на одинаковом расстоянии и осуществляется нормировка по величине среднего значения сигнала, то достигается максимальное значение корреляционной функции, и при полном совпадении изображений корреляционная функция (3) будет равна единице. Дальностьдо выделенной области объекта определяется из выражения где- расстояние между фотокамерами,- фокусное расстояние фотокамер. Аналогичным образом определяются расстояния , до всех объектов, попавших в поле зрения фотокамеры. Определив значение расстояния до -того объектаи размеры этого объекта на фотоприемной матрицепо горизонтали ипо вертикали, ширина объектаи высотаопределяются из выражений,. Вычислительный блок с помощью геометрии полученных изображений объектов может осуществить измерение расстояний между объектами на цифровой фотографии. Источники информации 1. Патент 5432594, МПК 01 3/00, 1995. 2. Патент РБ 7502, МПК 01 3/00, 2011. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01C 3/00
Метки: объекта, цифровой, фотокамеры, расстояния, посредством, определения, способ
Код ссылки
<a href="https://by.patents.su/4-17809-sposob-opredeleniya-rasstoyaniya-do-obekta-posredstvom-cifrovojj-fotokamery.html" rel="bookmark" title="База патентов Беларуси">Способ определения расстояния до объекта посредством цифровой фотокамеры</a>
Способ определения расстояния до объекта посредством цифровой фотокамеры
Номер патента: 17794
Опубликовано: 30.12.2013
Автор: Козлов Владимир Леонидович
МПК: G01C 3/00
Метки: фотокамеры, определения, посредством, расстояния, объекта, способ, цифровой
Текст:
...и оси наблюдения, то все точки плоскости будут находиться на одинаковом расстоянии от объектива. Если предмет имеет объемную форму, то необходимо на нем выделить плоскую поверхность. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем осуществляется сканирование одного окна относительно другого по горизонтали и вертикали, при этом вычисляется значение двухмерной нормированной корреляционной функции...
Способ определения дальности до объекта и его скорости посредством цифровой фотокамеры
Номер патента: 16674
Опубликовано: 30.12.2012
Автор: Козлов Владимир Леонидович
Метки: фотокамеры, посредством, дальности, определения, скорости, объекта, цифровой, способ
Текст:
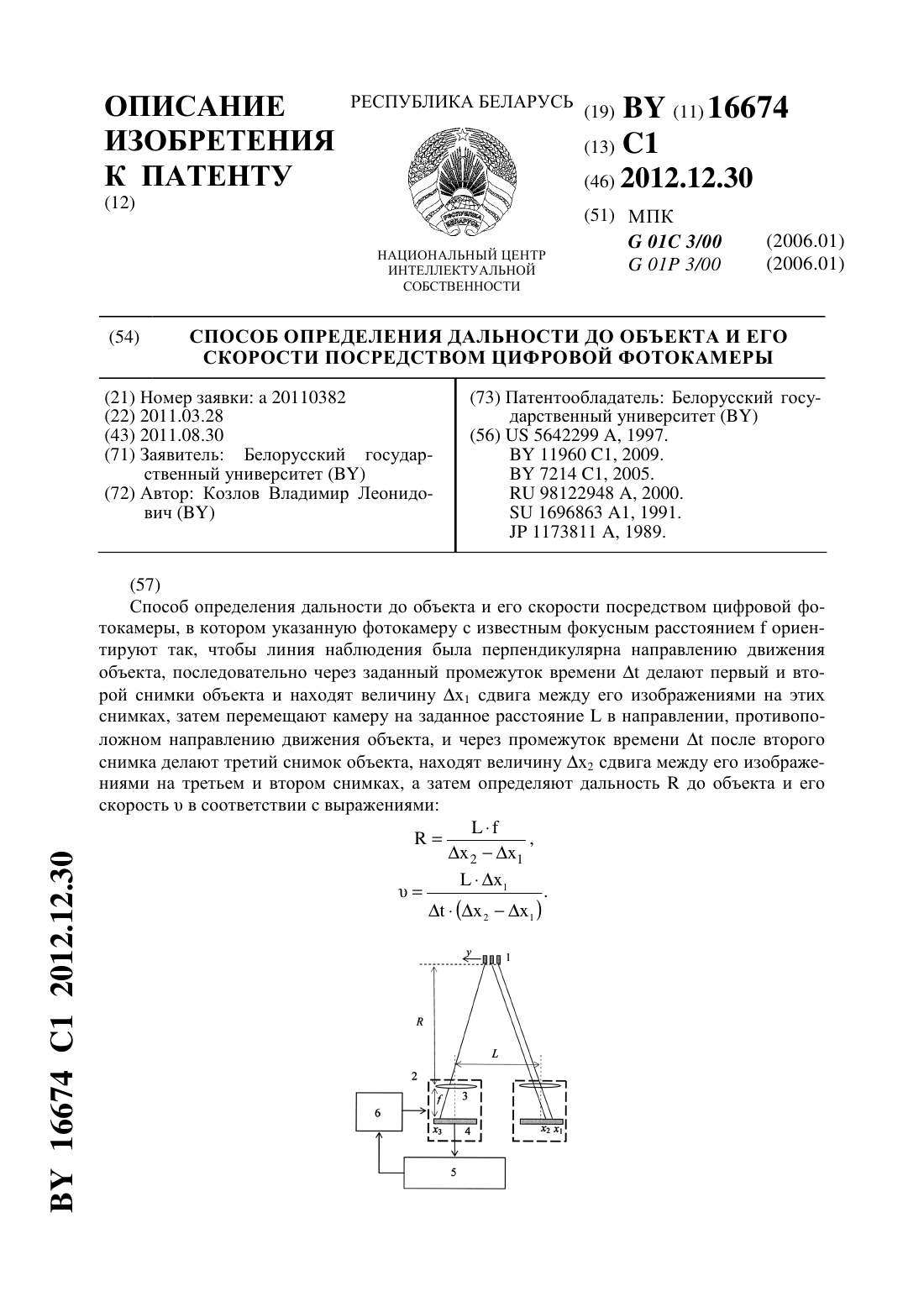
...) Свойство, появляющееся у заявляемого объекта, - это обеспечение возможности измерять дальность до движущихся объектов, а также скорость их движения. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя дальности и скорости на основе цифровой фотокамеры. Система содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5,...
Способ определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры

Номер патента: 17252
Опубликовано: 30.06.2013
Автор: Козлов Владимир Леонидович
МПК: G01C 23/00, G01C 3/00, G01P 3/00...
Метки: объекта, дальности, посредством, движущегося, цифровой, способ, определения, фотокамеры, скорости
Текст:
...фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5, блок перемещения фотокамеры 6. Система работает следующим образом. Предположим, измеряемый объект движется со скоростьюпод углом к линии горизонта(фигура). С помощью цифровой фотокамеры на фотоприемной матрице 4 формируется первое цифровое изображение измеряемого объекта с координатой 1 (фигура). Затем через интервал времени 1 формируется второе цифровое...
Способ определения расстояния до объекта
Номер патента: 17251
Опубликовано: 30.06.2013
Автор: Козлов Владимир Леонидович
МПК: G01C 3/00
Метки: определения, расстояния, способ, объекта
Текст:
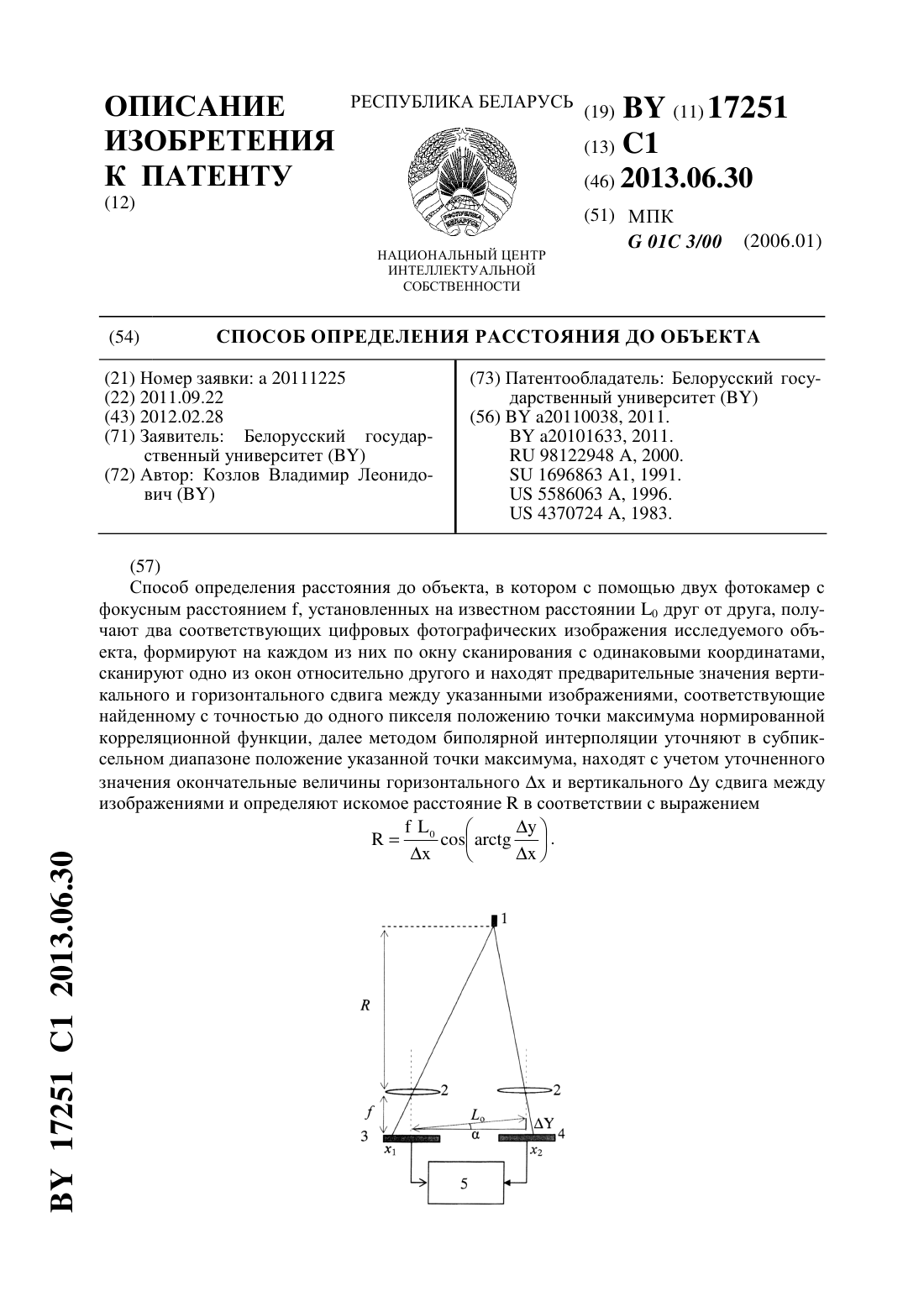
...3 и 4 формируются цифровые изображения измеряемых объектов. Полученные два цифровых изображения одних и тех же объектов поступают в вычислительный блок, где производится измерение расстояний по следующему алгоритму. На первом изображении формируется окно сканирования. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем осуществляется сканирование одного окна относительно другого по горизонтали и...
Способ определения дальности до объекта, его высоты и ширины
Номер патента: 16007
Опубликовано: 30.06.2012
Авторы: Козлов Владимир Леонидович, Кузьмичев Илья Романович
Метки: дальности, определения, ширины, способ, объекта, высоты
Текст:
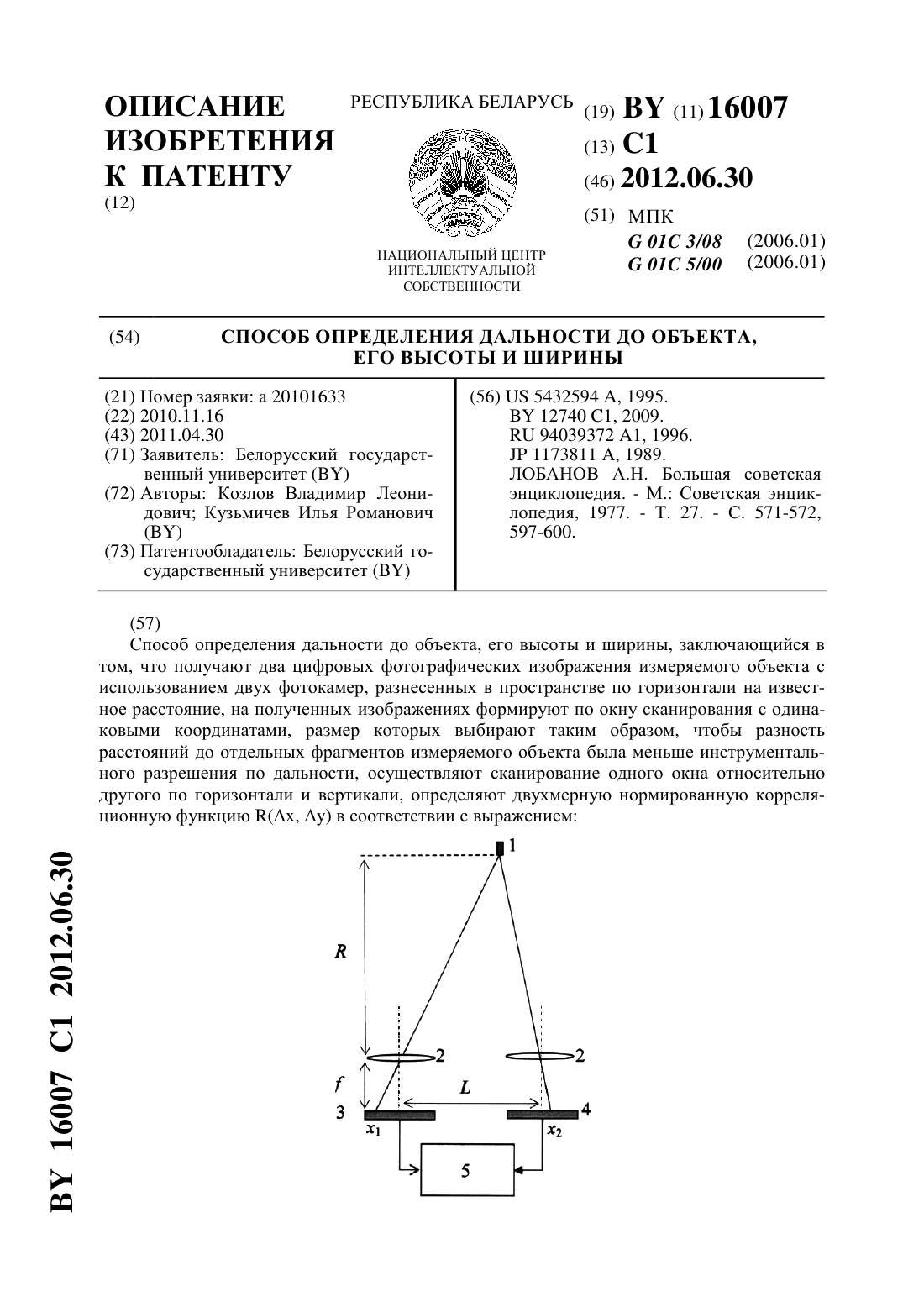
...горизонтали и вертикали соответственно. Свойство, появляющееся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное тем, что за счет выбора соответствующего размера сканирующего окна достигается максимальное значение корреляционной функции, а следовательно, большая точность определения сдвига между изображениями. Так как вычисляется двухмерная корреляционная функция и осуществляется ее нормировка, то устраняется...
Предыдущий патент: Способ получения меламина и способ удаления растворенных газов из водного раствора неочищенного меламина
Следующий патент: Лигатура для легирования платиновых сплавов
Случайный патент: Способ уменьшения слеживаемости измельченных в порошок отходов старых кровельных рубероидных ковров