Способ определения расстояния до объекта посредством цифровой фотокамеры
Текст
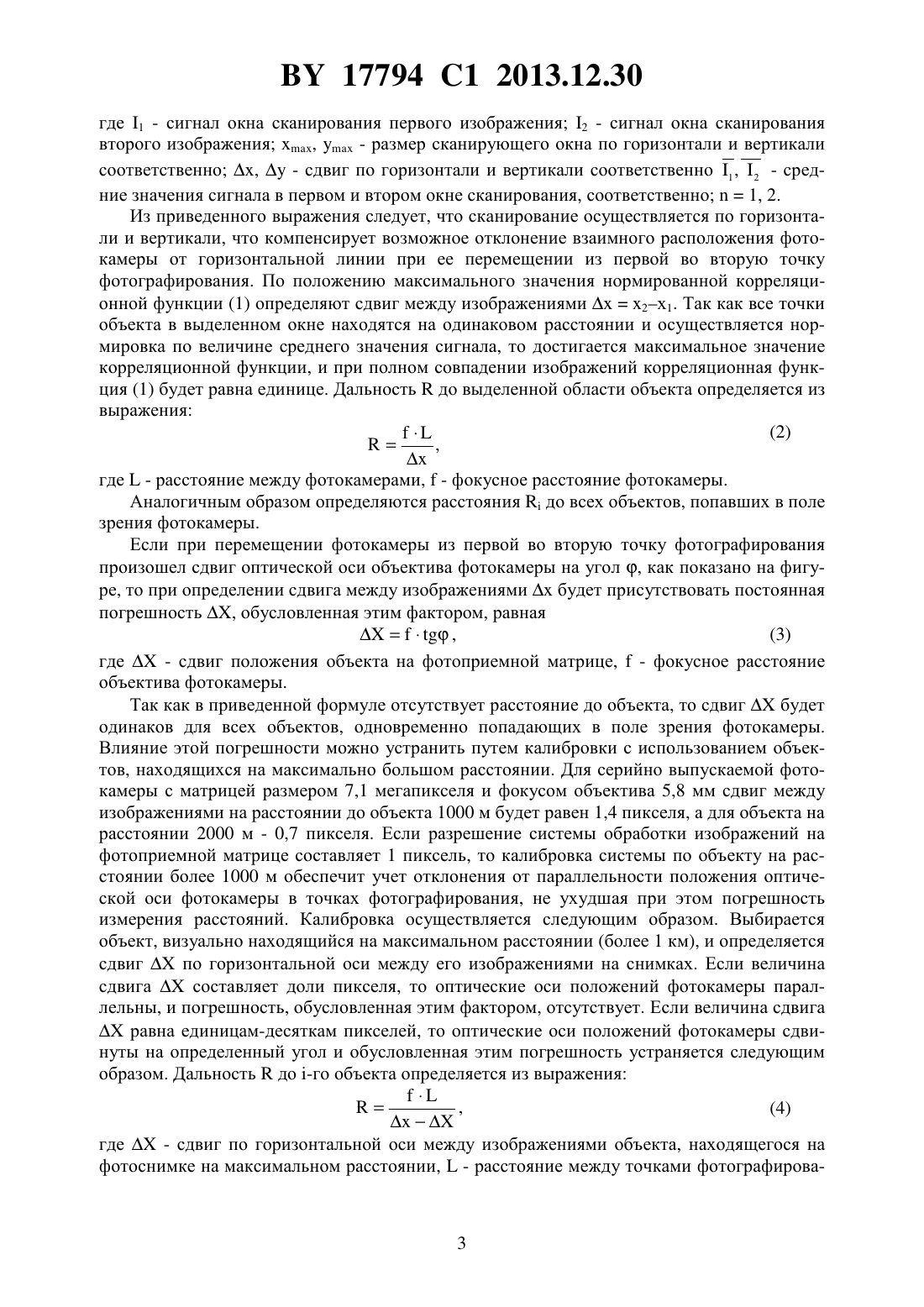
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПОСРЕДСТВОМ ЦИФРОВОЙ ФОТОКАМЕРЫ(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ определения расстояния до объекта посредством цифровой фотокамеры с известным фокусным расстоянием , в котором с помощью указанной фотокамеры делают первый снимок указанного объекта, перемещают фотокамеру по горизонтали в направлении, не совпадающем с направлением на объект, на заданное расстояние , делают второй снимок объекта после окончания перемещения, далее по положению максимума нормированной корреляционной функции определяют величинугоризонтального сдвига между изображениями объекта на первом и втором снимках, а затем определяют искомое расстояниев соответствии с выражением где- заранее определенная аналогичным образом величина горизонтального сдвига изображения калибровочного объекта, находившегося при съемках на максимальном рабочем расстоянии от фотокамеры. 17794 1 2013.12.30 Изобретение относится к области информационно-измерительных систем и предназначается для решения задач измерения дальности до объектов по их цифровым фотографическим изображениям. Известен способ измерения дальности до объекта 1, обладающего осью симметрии, с использованием двух цифровых фотокамер, разнесенных в пространстве по горизонтали на известное расстояние. Недостатком этого устройства является ограниченная точность измерений дальности. Наиболее близким к предлагаемому изобретению является измеритель расстояний 2,основанный на получении двух цифровых фотографических изображений объекта из двух точек, разнесенных в пространстве по горизонтали на известное расстояние, а дальность определяют по сдвигу между изображениями по горизонтальной оси. Недостатком способа является низкая точность измерений, обусловленная непараллельностью оптических осей при получении первого и второго изображений объекта. Задача изобретения - повышение точности измерения расстояний. Поставленная задача решается путем того, что в способе определения расстояния до объекта посредством цифровой фотокамеры с фокусным расстоянием , в котором с помощью указанной фотокамеры делают первый снимок указанного объекта, перемещают фотокамеру по горизонтали в направлении, не совпадающем с направлением на объект, на заданное расстояние , делают второй снимок объекта после окончания перемещения, далее по положению максимума нормированной корреляционной функции определяют величинугоризонтального сдвига между изображениями объекта на первом и втором снимках, а затем определяют искомое расстояниев соответствии с выражением,где- заранее определенная величина горизонтального сдвига изображения калибровочного объекта, находящегося при съемках на максимальном рабочем расстоянии от фотокамеры. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя расстояний на основе цифрового фотоаппарата. Система содержит измеряемый объект 1, цифровой фотоаппарат, состоящий из линзы 2 и фотоприемной матрицы 3, вычислительный блок 4. Измеритель расстояний работает следующим образом. С помощью цифрового фотоаппарата на фотоприемной матрице 3 регистрируются цифровые фотографические изображения измеряемого объекта из двух точек, разнесенных в пространстве по горизонтали на известное расстояние. Полученные два цифровых изображения одного и того же объекта поступают в вычислительный блок, где производится измерение расстояний по следующему алгоритму. На первом изображении формируется окно сканирования, размер которого выбирают таким образом, чтобы разность расстояний до отдельных фрагментов выделенного объекта была меньше инструментального разрешения по дальности. Если поверхность объекта является плоскостью, перпендикулярной горизонтали и оси наблюдения, то все точки плоскости будут находиться на одинаковом расстоянии от объектива. Если предмет имеет объемную форму, то необходимо на нем выделить плоскую поверхность. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем осуществляется сканирование одного окна относительно другого по горизонтали и вертикали, при этом вычисляется значение двухмерной нормированной корреляционной функции между выделенными изображениями в соответствии с выражением(, )(1 (, )1 )(2 (,)2 ) 17794 1 2013.12.30 где 1 - сигнал окна сканирования первого изображения 2 - сигнал окна сканирования второго изображения ,- размер сканирующего окна по горизонтали и вертикали соответственно ,- сдвиг по горизонтали и вертикали соответственно 1 ,2 - средние значения сигнала в первом и втором окне сканирования, соответственно 1, 2. Из приведенного выражения следует, что сканирование осуществляется по горизонтали и вертикали, что компенсирует возможное отклонение взаимного расположения фотокамеры от горизонтальной линии при ее перемещении из первой во вторую точку фотографирования. По положению максимального значения нормированной корреляционной функции (1) определяют сдвиг между изображениями 2 х 1. Так как все точки объекта в выделенном окне находятся на одинаковом расстоянии и осуществляется нормировка по величине среднего значения сигнала, то достигается максимальное значение корреляционной функции, и при полном совпадении изображений корреляционная функция (1) будет равна единице. Дальностьдо выделенной области объекта определяется из выражения где- расстояние между фотокамерами,- фокусное расстояние фотокамеры. Аналогичным образом определяются расстояниядо всех объектов, попавших в поле зрения фотокамеры. Если при перемещении фотокамеры из первой во вторую точку фотографирования произошел сдвиг оптической оси объектива фотокамеры на угол , как показано на фигуре, то при определении сдвига между изображениямибудет присутствовать постоянная погрешность , обусловленная этим фактором, равная(3),где- сдвиг положения объекта на фотоприемной матрице,- фокусное расстояние объектива фотокамеры. Так как в приведенной формуле отсутствует расстояние до объекта, то сдвигбудет одинаков для всех объектов, одновременно попадающих в поле зрения фотокамеры. Влияние этой погрешности можно устранить путем калибровки с использованием объектов, находящихся на максимально большом расстоянии. Для серийно выпускаемой фотокамеры с матрицей размером 7,1 мегапикселя и фокусом объектива 5,8 мм сдвиг между изображениями на расстоянии до объекта 1000 м будет равен 1,4 пикселя, а для объекта на расстоянии 2000 м - 0,7 пикселя. Если разрешение системы обработки изображений на фотоприемной матрице составляет 1 пиксель, то калибровка системы по объекту на расстоянии более 1000 м обеспечит учет отклонения от параллельности положения оптической оси фотокамеры в точках фотографирования, не ухудшая при этом погрешность измерения расстояний. Калибровка осуществляется следующим образом. Выбирается объект, визуально находящийся на максимальном расстоянии (более 1 км), и определяется сдвигпо горизонтальной оси между его изображениями на снимках. Если величина сдвигасоставляет доли пикселя, то оптические оси положений фотокамеры параллельны, и погрешность, обусловленная этим фактором, отсутствует. Если величина сдвигаравна единицам-десяткам пикселей, то оптические оси положений фотокамеры сдвинуты на определенный угол и обусловленная этим погрешность устраняется следующим образом. Дальностьдо -го объекта определяется из выражения,(4)где- сдвиг по горизонтальной оси между изображениями объекта, находящегося на фотоснимке на максимальном расстоянии,- расстояние между точками фотографирова 3 17794 1 2013.12.30 ния в пространстве,- фокусное расстояние фотокамеры,- сдвиг между изображениями объекта по горизонтальной оси. Таким образом, за счет калибровки по объекту, находящемуся на фотоснимке на максимальном расстоянии, достигается учет отклонения от параллельности положения оптической оси фотокамеры в двух точках фотографирования, что обеспечивает повышение точности измерения расстояний. Источники информации 1.5432594, МПК 01 3/00, 1995. 2. Патент 7502, МПК 01 С 3/00, 2011. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01C 3/00
Метки: объекта, посредством, определения, расстояния, цифровой, способ, фотокамеры
Код ссылки
<a href="https://by.patents.su/4-17794-sposob-opredeleniya-rasstoyaniya-do-obekta-posredstvom-cifrovojj-fotokamery.html" rel="bookmark" title="База патентов Беларуси">Способ определения расстояния до объекта посредством цифровой фотокамеры</a>
Способ определения дальности до объекта и его скорости посредством цифровой фотокамеры
Номер патента: 16674
Опубликовано: 30.12.2012
Автор: Козлов Владимир Леонидович
Метки: скорости, фотокамеры, определения, объекта, способ, цифровой, посредством, дальности
Текст:
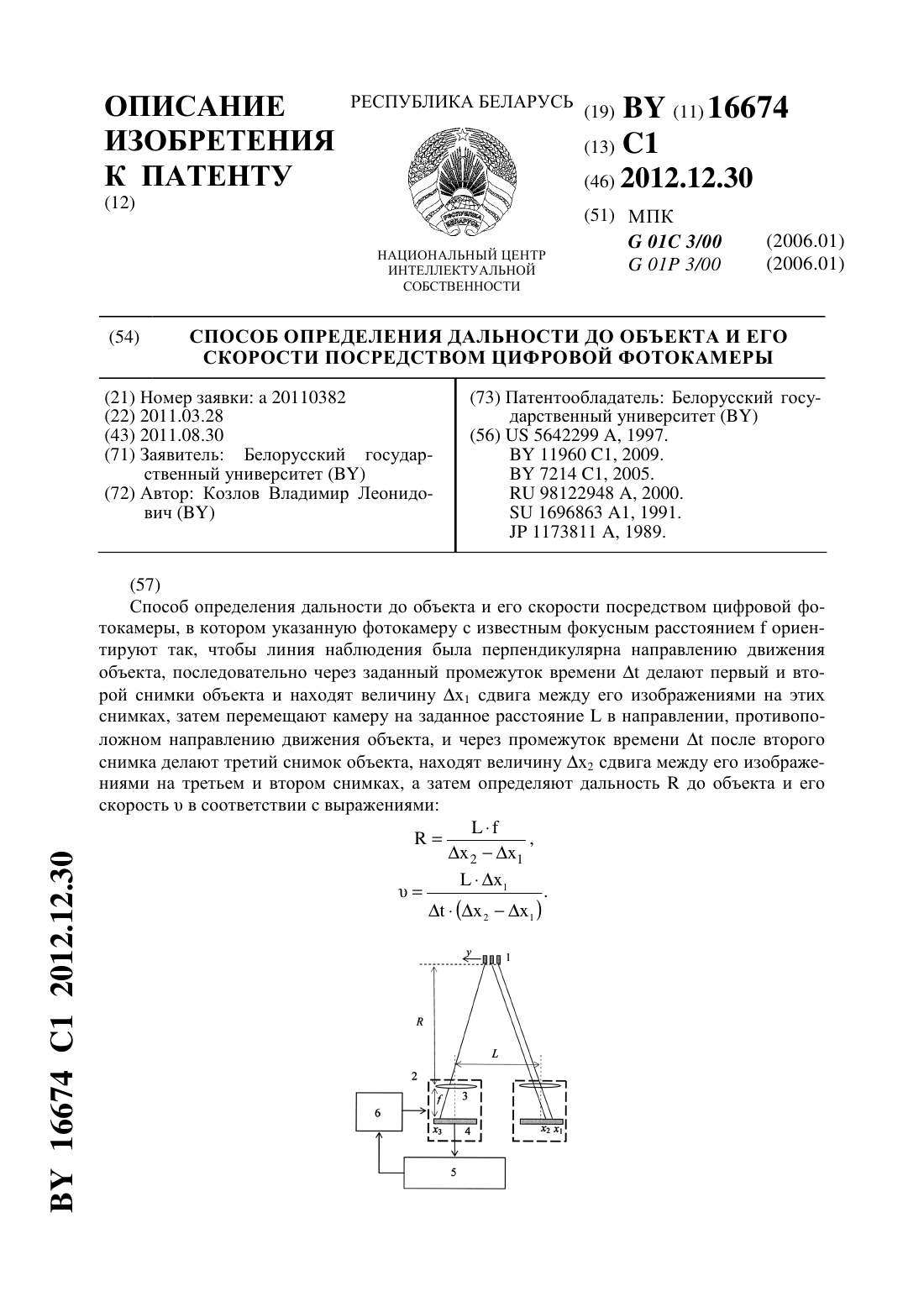
...) Свойство, появляющееся у заявляемого объекта, - это обеспечение возможности измерять дальность до движущихся объектов, а также скорость их движения. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя дальности и скорости на основе цифровой фотокамеры. Система содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5,...
Способ определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры

Номер патента: 17252
Опубликовано: 30.06.2013
Автор: Козлов Владимир Леонидович
МПК: G01C 23/00, G01P 3/00, G01C 3/00...
Метки: движущегося, скорости, дальности, фотокамеры, цифровой, способ, определения, посредством, объекта
Текст:
...фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5, блок перемещения фотокамеры 6. Система работает следующим образом. Предположим, измеряемый объект движется со скоростьюпод углом к линии горизонта(фигура). С помощью цифровой фотокамеры на фотоприемной матрице 4 формируется первое цифровое изображение измеряемого объекта с координатой 1 (фигура). Затем через интервал времени 1 формируется второе цифровое...
Способ определения расстояния до объекта
Номер патента: 17251
Опубликовано: 30.06.2013
Автор: Козлов Владимир Леонидович
МПК: G01C 3/00
Метки: объекта, расстояния, определения, способ
Текст:
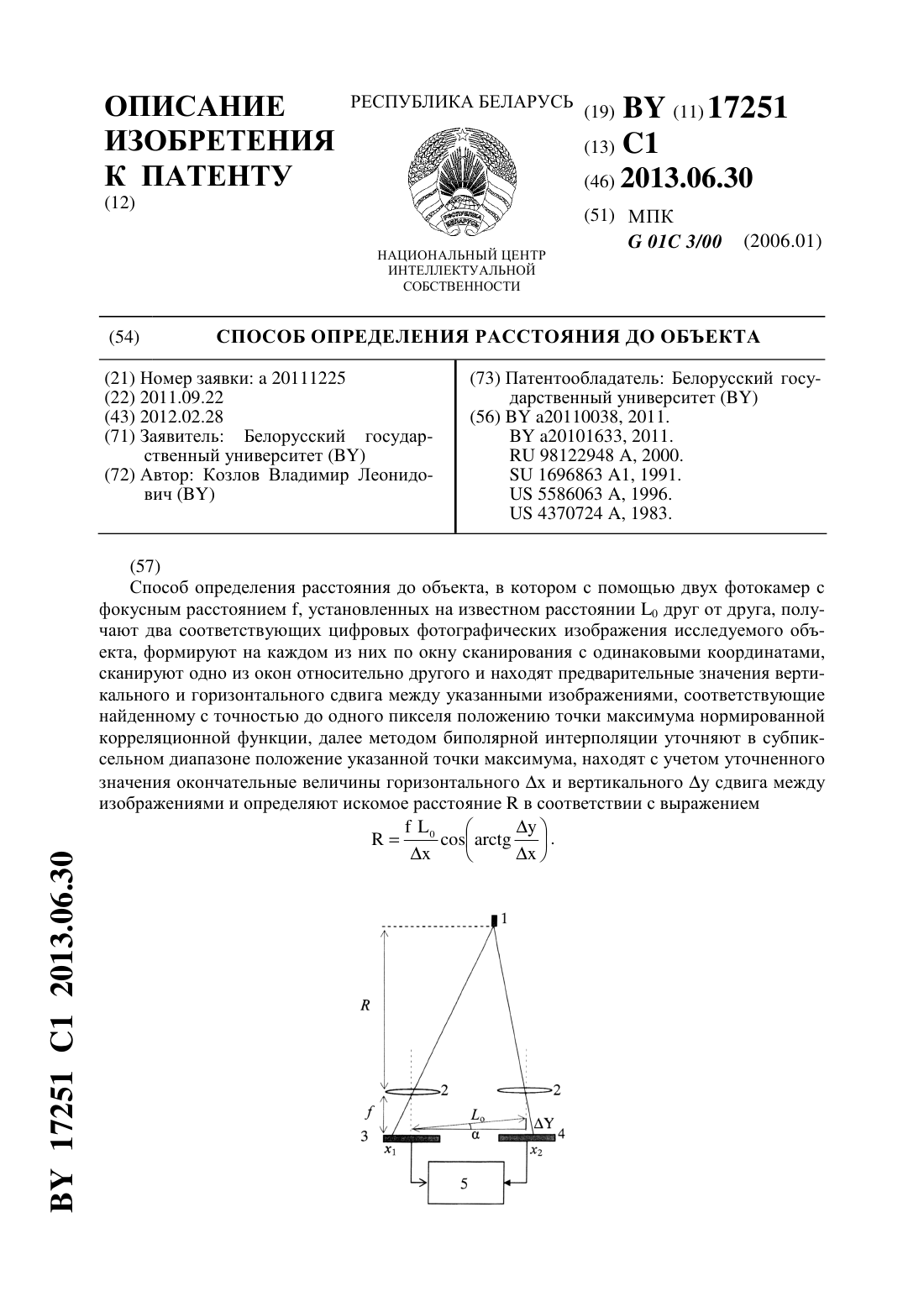
...3 и 4 формируются цифровые изображения измеряемых объектов. Полученные два цифровых изображения одних и тех же объектов поступают в вычислительный блок, где производится измерение расстояний по следующему алгоритму. На первом изображении формируется окно сканирования. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем осуществляется сканирование одного окна относительно другого по горизонтали и...
Способ определения дальности до объекта, его высоты и ширины
Номер патента: 16007
Опубликовано: 30.06.2012
Авторы: Кузьмичев Илья Романович, Козлов Владимир Леонидович
Метки: ширины, высоты, способ, определения, объекта, дальности
Текст:
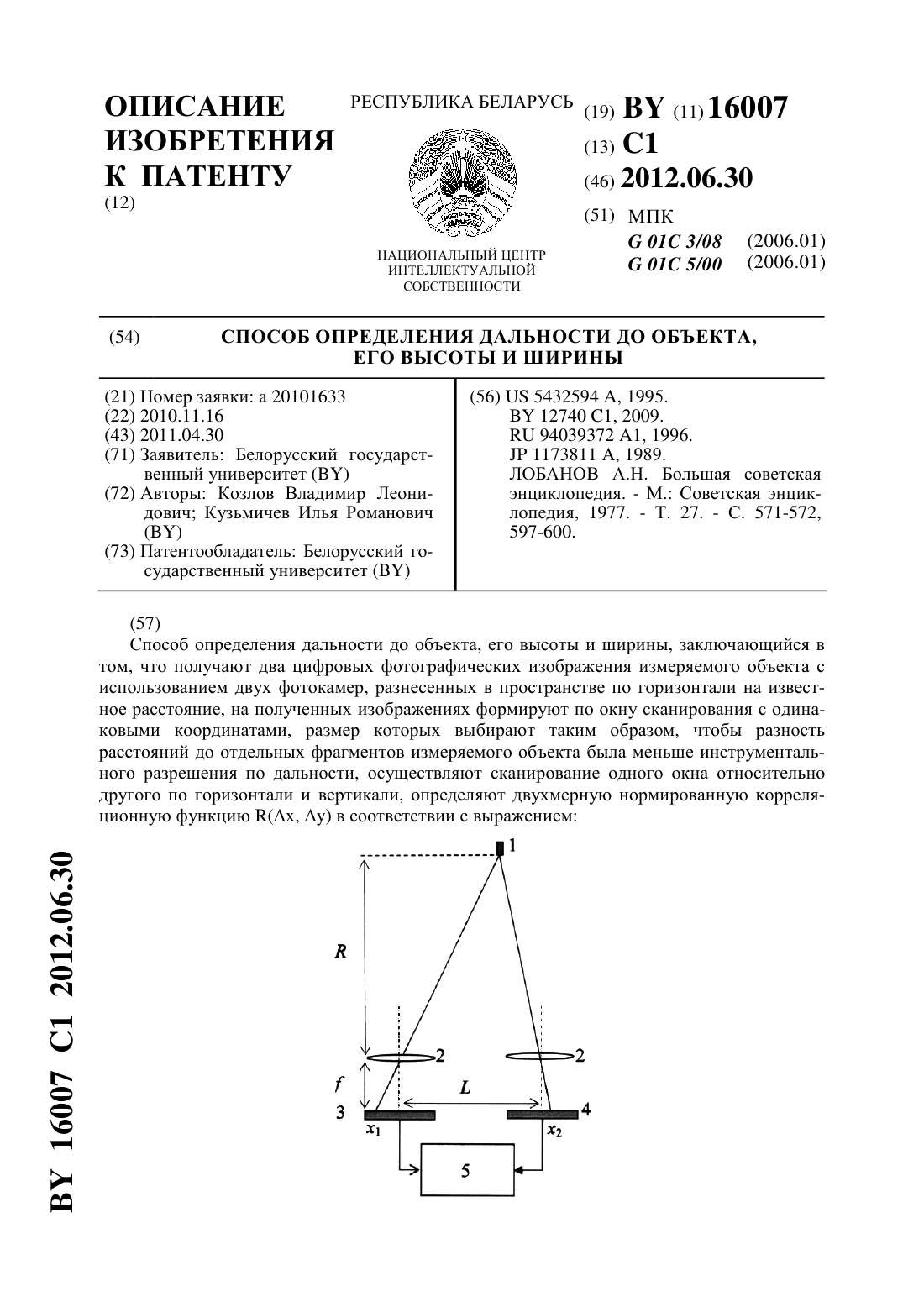
...горизонтали и вертикали соответственно. Свойство, появляющееся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное тем, что за счет выбора соответствующего размера сканирующего окна достигается максимальное значение корреляционной функции, а следовательно, большая точность определения сдвига между изображениями. Так как вычисляется двухмерная корреляционная функция и осуществляется ее нормировка, то устраняется...
Способ определения дальности до объекта, его высоты и ширины
Номер патента: 16426
Опубликовано: 30.10.2012
Авторы: Козлов Владимир Леонидович, Кузьмичев Илья Романович
Метки: ширины, высоты, способ, объекта, определения, дальности
Текст:
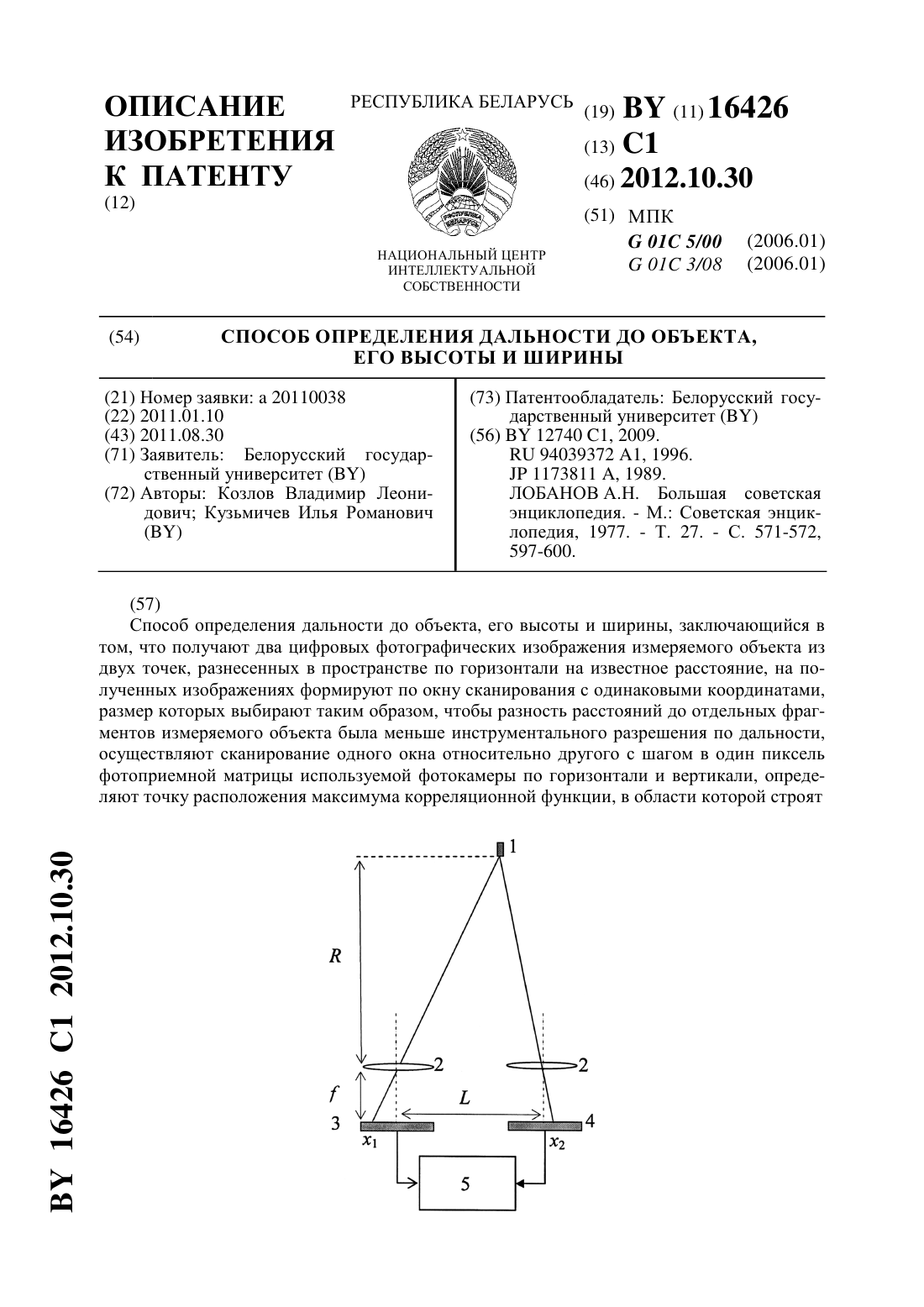
...и интенсивности узлов сетки, соседствующих с узлом сетки с максимальным значением интенсивности ,- координата и интенсивность узла сетки с максимальным значением интенсивности а дальностьдо объекта определяют из выражения, где- фокусное расстояние используемой фотокамеры- расстояние между точками фотографирования а высотуи ширинуобъекта определяют из выражений где ,- размеры объекта на фотоприемной матрице по горизонтали и вертикали....
Предыдущий патент: Резинометаллический шарнир для гусеничной цепи транспортного средства
Следующий патент: Устройство для вычисления полиномиальных симметрических булевых функций десяти переменных
Случайный патент: Средство для определения лейкоцитов в моче