Способ определения расстояния до объекта

Текст
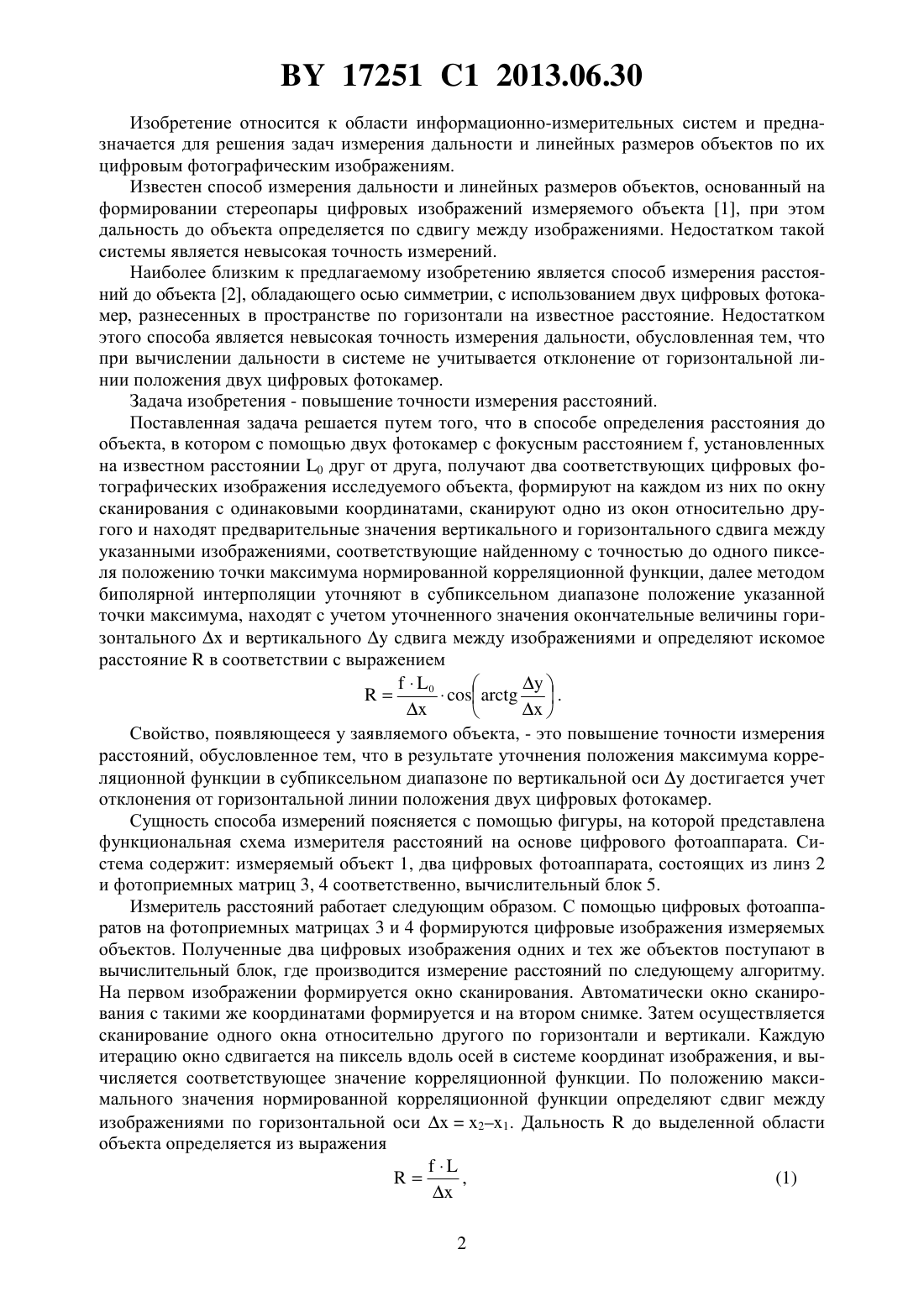
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ определения расстояния до объекта, в котором с помощью двух фотокамер с фокусным расстоянием , установленных на известном расстоянии 0 друг от друга, получают два соответствующих цифровых фотографических изображения исследуемого объекта, формируют на каждом из них по окну сканирования с одинаковыми координатами,сканируют одно из окон относительно другого и находят предварительные значения вертикального и горизонтального сдвига между указанными изображениями, соответствующие найденному с точностью до одного пикселя положению точки максимума нормированной корреляционной функции, далее методом биполярной интерполяции уточняют в субпиксельном диапазоне положение указанной точки максимума, находят с учетом уточненного значения окончательные величины горизонтальногои вертикальногосдвига между изображениями и определяют искомое расстояниев соответствии с выражением 0 17251 1 2013.06.30 Изобретение относится к области информационно-измерительных систем и предназначается для решения задач измерения дальности и линейных размеров объектов по их цифровым фотографическим изображениям. Известен способ измерения дальности и линейных размеров объектов, основанный на формировании стереопары цифровых изображений измеряемого объекта 1, при этом дальность до объекта определяется по сдвигу между изображениями. Недостатком такой системы является невысокая точность измерений. Наиболее близким к предлагаемому изобретению является способ измерения расстояний до объекта 2, обладающего осью симметрии, с использованием двух цифровых фотокамер, разнесенных в пространстве по горизонтали на известное расстояние. Недостатком этого способа является невысокая точность измерения дальности, обусловленная тем, что при вычислении дальности в системе не учитывается отклонение от горизонтальной линии положения двух цифровых фотокамер. Задача изобретения - повышение точности измерения расстояний. Поставленная задача решается путем того, что в способе определения расстояния до объекта, в котором с помощью двух фотокамер с фокусным расстоянием , установленных на известном расстоянии 0 друг от друга, получают два соответствующих цифровых фотографических изображения исследуемого объекта, формируют на каждом из них по окну сканирования с одинаковыми координатами, сканируют одно из окон относительно другого и находят предварительные значения вертикального и горизонтального сдвига между указанными изображениями, соответствующие найденному с точностью до одного пикселя положению точки максимума нормированной корреляционной функции, далее методом биполярной интерполяции уточняют в субпиксельном диапазоне положение указанной точки максимума, находят с учетом уточненного значения окончательные величины горизонтальногои вертикальногосдвига между изображениями и определяют искомое расстояниев соответствии с выражением 0 Свойство, появляющееся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное тем, что в результате уточнения положения максимума корреляционной функции в субпиксельном диапазоне по вертикальной осидостигается учет отклонения от горизонтальной линии положения двух цифровых фотокамер. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя расстояний на основе цифрового фотоаппарата. Система содержит измеряемый объект 1, два цифровых фотоаппарата, состоящих из линз 2 и фотоприемных матриц 3, 4 соответственно, вычислительный блок 5. Измеритель расстояний работает следующим образом. С помощью цифровых фотоаппаратов на фотоприемных матрицах 3 и 4 формируются цифровые изображения измеряемых объектов. Полученные два цифровых изображения одних и тех же объектов поступают в вычислительный блок, где производится измерение расстояний по следующему алгоритму. На первом изображении формируется окно сканирования. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем осуществляется сканирование одного окна относительно другого по горизонтали и вертикали. Каждую итерацию окно сдвигается на пиксель вдоль осей в системе координат изображения, и вычисляется соответствующее значение корреляционной функции. По положению максимального значения нормированной корреляционной функции определяют сдвиг между изображениями по горизонтальной оси 21. Дальностьдо выделенной области объекта определяется из выражения 17251 1 2013.06.30 где- расстояние между фотокамерами по горизонтальной оси,- фокусное расстояние фотокамер. Аналогичным образом определяются расстояниядо всех объектов, попавших в поле зрения фотокамеры. Так как сканирование одного окна относительно другого осуществляется со сдвигом на один пиксель вдоль осей координат, то положение максимума корреляционной функции и, следовательно, сдвиг между изображениями определяются также с точностью в один пиксель. Для уточнения величины сдвигав субпиксельном диапазоне используется билинейная интерполяция сигнала с заданным шагом, алгоритм которой заключается в следующем. Обычно область уточнения выбирается шириной и высотой в 2 пикселя. В точке максимального значения корреляционной функции (, ), полученного на этапе грубой оценки с точностью в один пиксель, строится сетка ячеек, соответствующих узлам интерполяции, и ведется повторное сканирование с шагом, равным 1/ пикселя, где- целое число (520). Таким образом, вычисляется значение корреляционной функции для 2 узлов сетки. Интенсивность (,) узла сетки вычисляется из выражения(2)(1)(,1)2(1,1),где 1/ - шаг сетки ,- горизонтальный и вертикальный индексы узла соответственно(, ) - максимальное значение корреляционной функции (1, ), (,1),(1,1) - значения интенсивности корреляционной функции в точках, ближайших к максимальному. Из выражения (2) находится узел сетки с максимальным значением интенсивностии координатами,, которые определяют сдвиг между изображениями объекта по горизонтальной и вертикальной оси соответственно. Если фотокамеры расположены точно на одной горизонтальной линии, то сдвиг между изображениями объекта по вертикальной оси будет отсутствовать, т.е.0, следовательно, расстояние между фотокамерами в пространстве 0 будет равно расстоянию между фотокамерами по горизонтальной оси 0. Если имеется сдвиг между фотокамерами по вертикальной оси , как показано на фигуре (при этом оптические оси объективов камер параллельны), то расстояние между фотокамерами по горизонтальной оси не будет равно 0, а будет определяться следующим образом(3)0,где 0 - расстояние между фотокамерами в пространстве,- угол между горизонтальной осью и линией, соединяющей фотокамеры. При этом сдвиг между изображениями объекта на фотокамерах по вертикальной оси не будет равен нулю 0. Определив сдвиг между изображениями объекта по горизонтальной и вертикальной осии , можно найти уголиз выражения(4)/. Таким образом, расчетная формула для определения дальности (1), учитывающая отклонение от горизонтальной линии положения двух цифровых фотокамер, будет иметь вид 0 где 0 - расстояние между точками фотографирования в пространстве,- фокусное расстояние фотокамеры,- сдвиг между изображениями объекта по горизонтальной оси,сдвиг между изображениями объекта по вертикальной оси. Таким образом, за счет измерения положения максимума корреляционной функции в субпиксельном диапазоне по вертикальной оси учитывается отклонение от горизонтальной линии положения двух цифровых фотокамер, за счет чего достигается повышение 3 17251 1 2013.06.30 точности измерения расстояний на основе анализа двух цифровых фотографических изображений, полученных с двух точек, разнесенных в пространстве по горизонтали. Источники информации 1. Грузман И.С. и др. Цифровая обработка изображений в информационных системах. Новосибирск НГТУ, 2000. - С. 143-156. 2.20110038, 2011. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01C 3/00
Метки: определения, объекта, расстояния, способ
Код ссылки
<a href="https://by.patents.su/4-17251-sposob-opredeleniya-rasstoyaniya-do-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ определения расстояния до объекта</a>
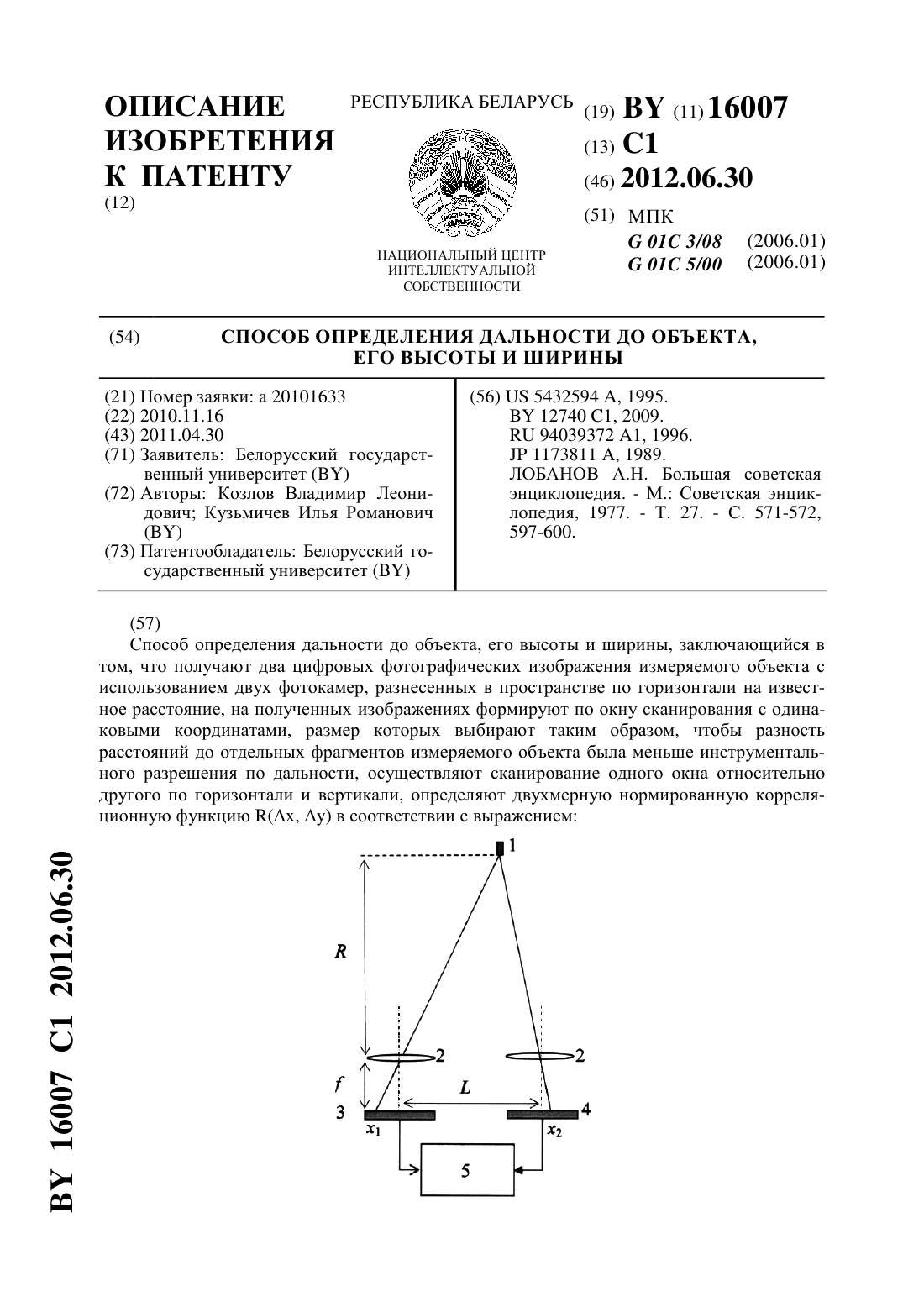
Способ определения дальности до объекта, его высоты и ширины
Номер патента: 16007
Опубликовано: 30.06.2012
Авторы: Кузьмичев Илья Романович, Козлов Владимир Леонидович
Метки: способ, дальности, высоты, ширины, объекта, определения
Текст:
...горизонтали и вертикали соответственно. Свойство, появляющееся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное тем, что за счет выбора соответствующего размера сканирующего окна достигается максимальное значение корреляционной функции, а следовательно, большая точность определения сдвига между изображениями. Так как вычисляется двухмерная корреляционная функция и осуществляется ее нормировка, то устраняется...
Способ определения дальности до объекта, его высоты и ширины
Номер патента: 16426
Опубликовано: 30.10.2012
Авторы: Кузьмичев Илья Романович, Козлов Владимир Леонидович
Метки: ширины, дальности, высоты, способ, объекта, определения
Текст:
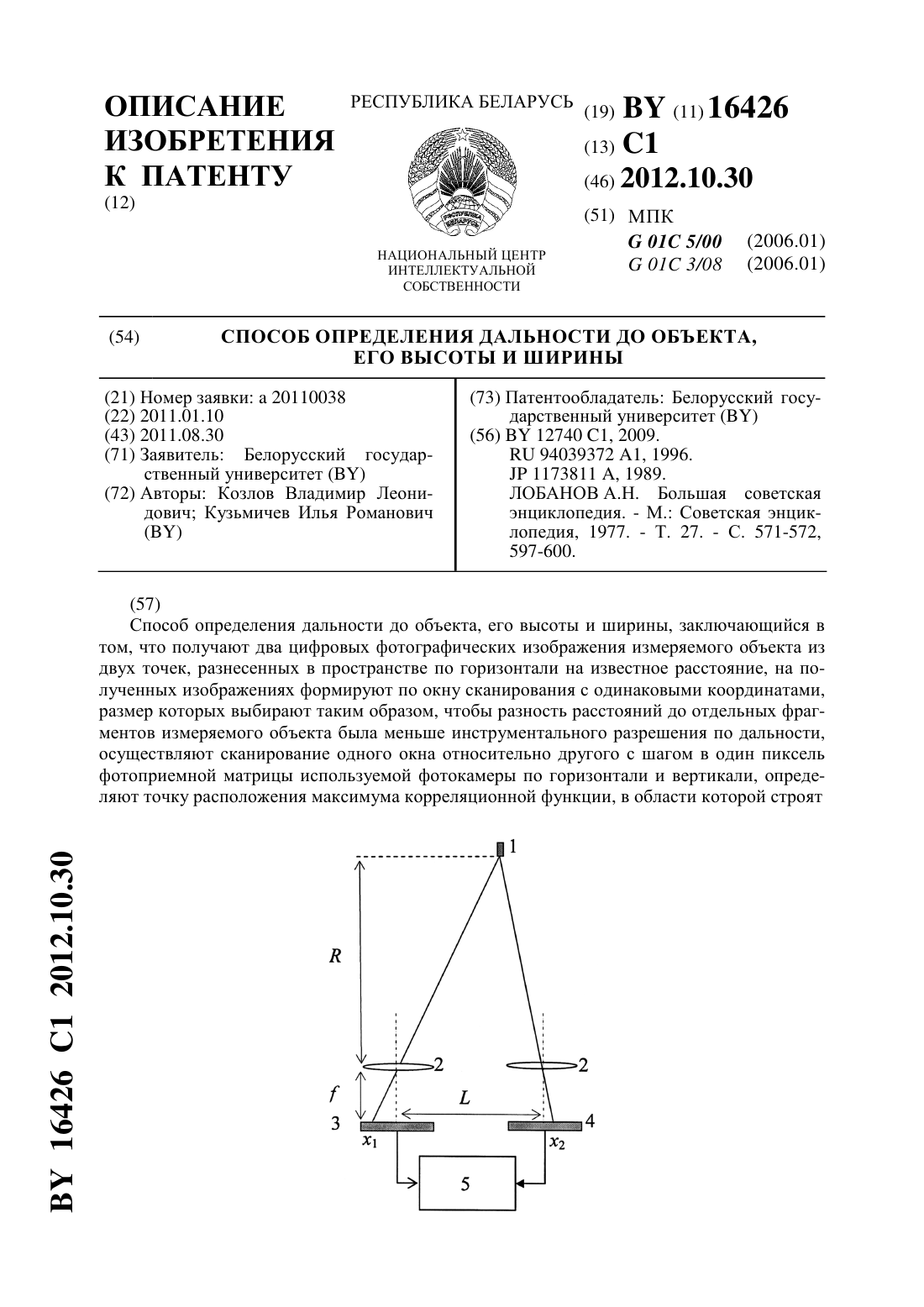
...и интенсивности узлов сетки, соседствующих с узлом сетки с максимальным значением интенсивности ,- координата и интенсивность узла сетки с максимальным значением интенсивности а дальностьдо объекта определяют из выражения, где- фокусное расстояние используемой фотокамеры- расстояние между точками фотографирования а высотуи ширинуобъекта определяют из выражений где ,- размеры объекта на фотоприемной матрице по горизонтали и вертикали....
Способ определения дальности до объекта и его скорости посредством цифровой фотокамеры
Номер патента: 16674
Опубликовано: 30.12.2012
Автор: Козлов Владимир Леонидович
Метки: определения, скорости, дальности, фотокамеры, цифровой, посредством, объекта, способ
Текст:
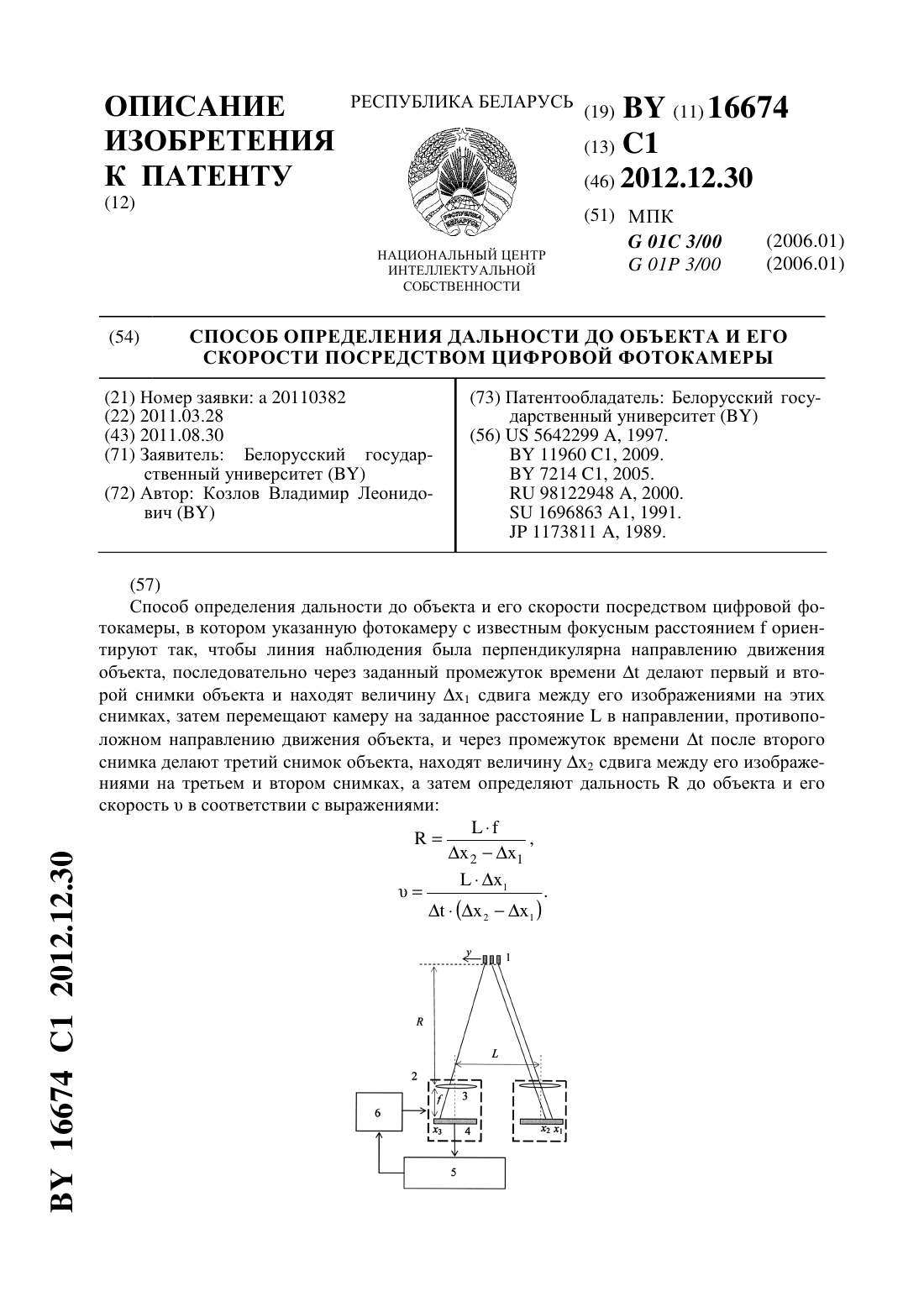
...) Свойство, появляющееся у заявляемого объекта, - это обеспечение возможности измерять дальность до движущихся объектов, а также скорость их движения. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя дальности и скорости на основе цифровой фотокамеры. Система содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5,...
Акустическое устройство измерения расстояния до объекта
Номер патента: 4774
Опубликовано: 30.12.2002
Авторы: Осипов Анатолий Николаевич, Достанко Анатолий Павлович, Шахлевич Григорий Михайлович, Боженков Владимир Владимирович
МПК: G01S 15/08
Метки: устройство, объекта, измерения, акустическое, расстояния
Текст:
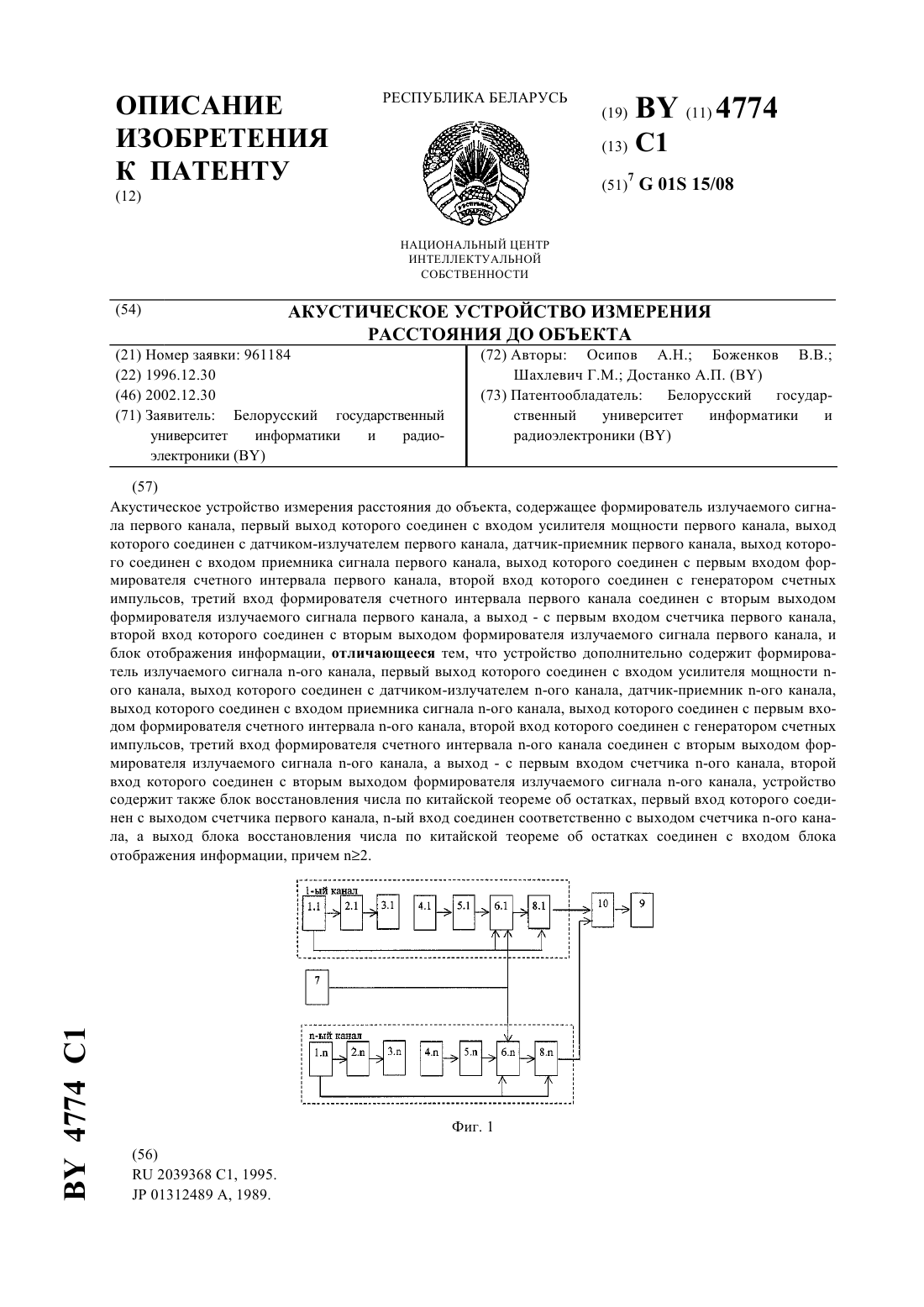
...Объект зондируетсясигналами, характеризующимися различными периодами следования сигнала, и определение расстояния до объекта производится порезультатам измерений в соответствии с китайской теоремой об остатках. Это позволяет измерять расстояние до объекта зондирующими сигналами с малой скважностью. На фиг. 1 приведена структурная схема устройства. На фиг. 2 и фиг. 3 приведены структурные схемы соответственно формирователя излучаемого...
Способ определения дальности до объекта и его скорости
Номер патента: 13509
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
Метки: скорости, дальности, объекта, способ, определения
Текст:
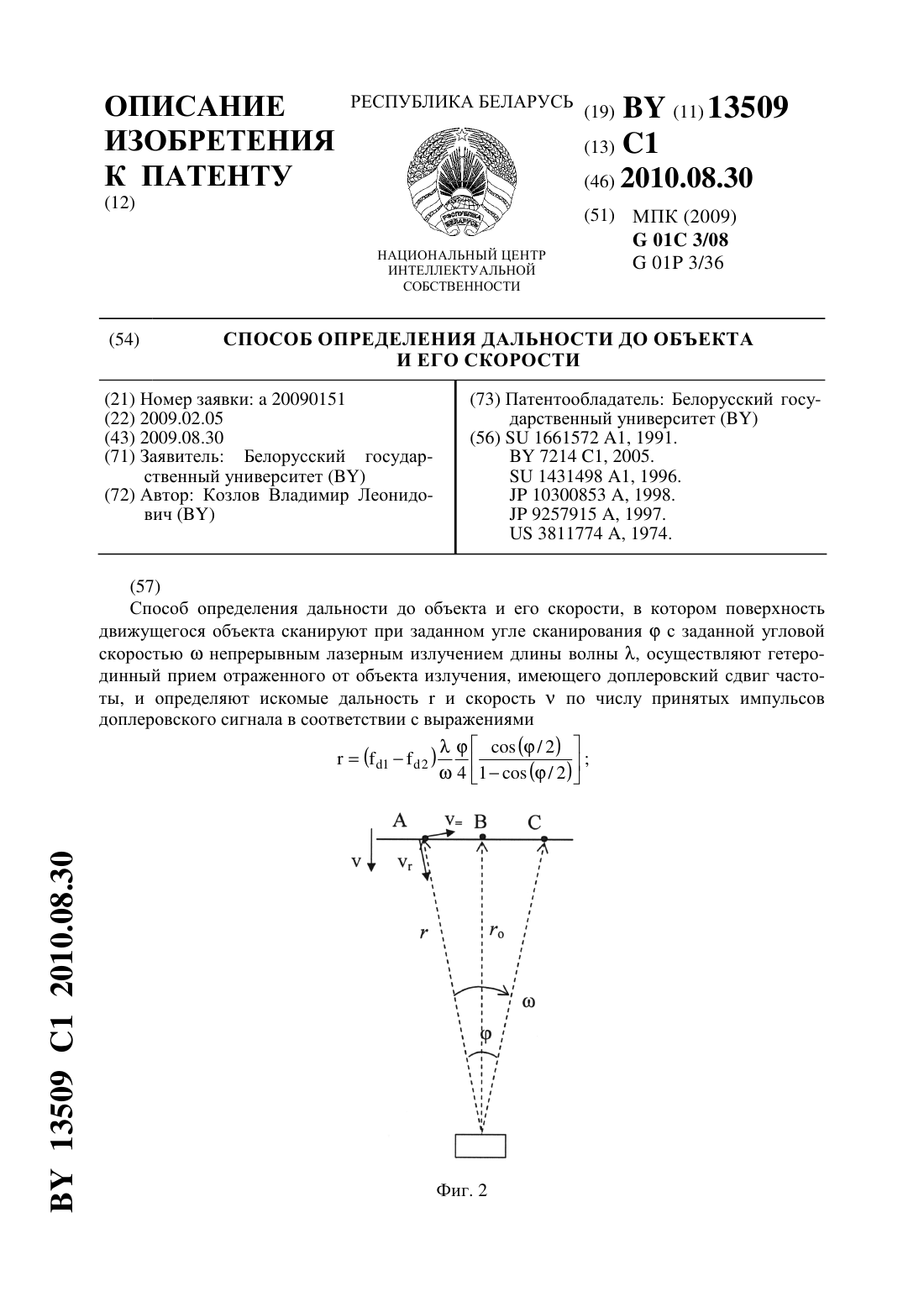
...неподвижна, поэтому отраженное от поверхности оптическое излучение будет сдвигаться по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , обусловленную только сканированием поверхности лазерным лучом, мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,скорость света,- длина волны...
Предыдущий патент: 4,4’–Бис[1-(4-гидрокси-3-карбокси-6-метил)фенилазо]дифенил и его металлпроизводные соли как фотоориентирующий тонкопленочный материал
Следующий патент: Способ определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры
Случайный патент: Устройство для ультразвуковой контактной очистки изделий