Способ определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры

Текст
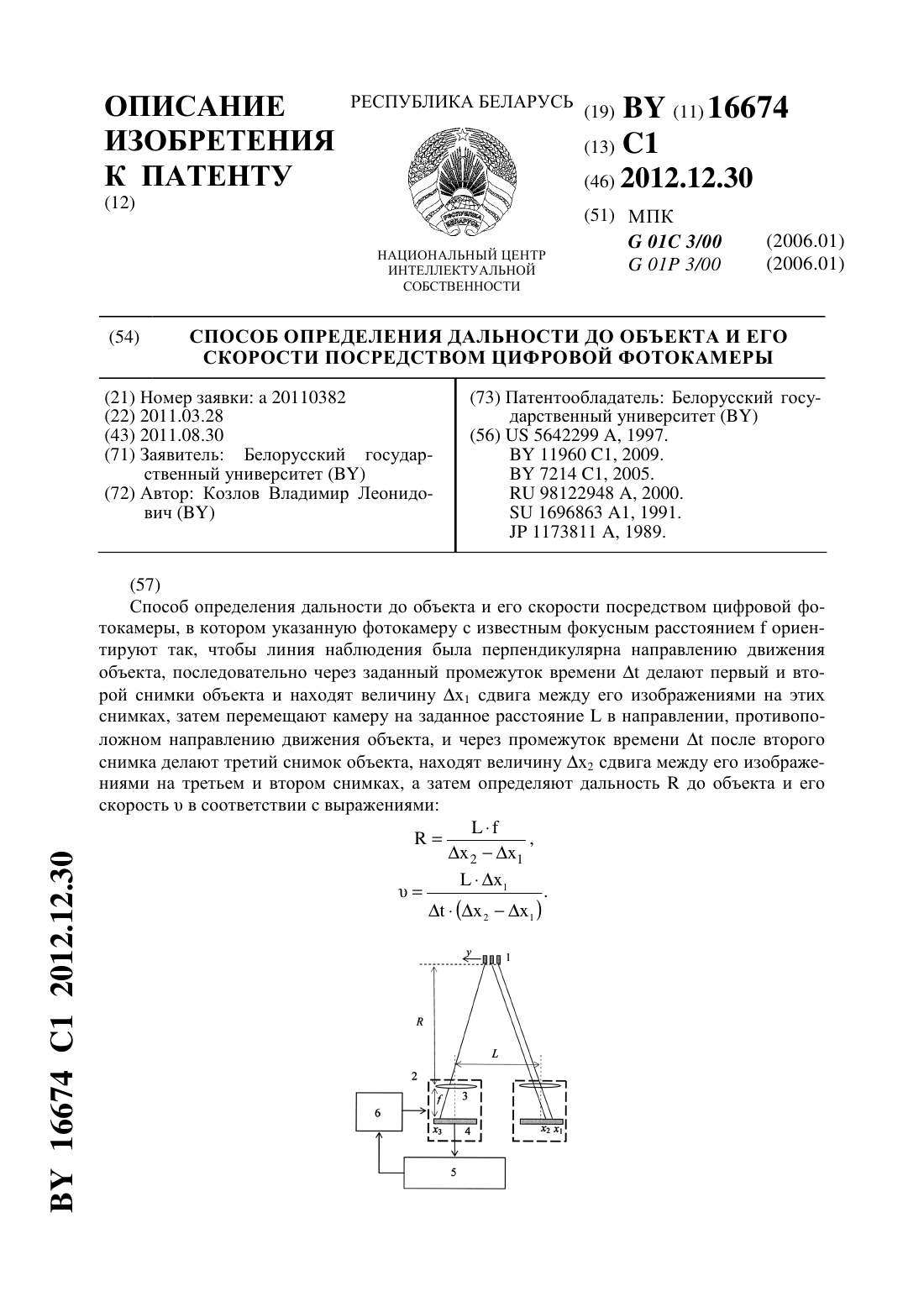
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ДВИЖУЩЕГОСЯ ОБЪЕКТА И ЕГО СКОРОСТИ ПОСРЕДСТВОМ ЦИФРОВОЙ ФОТОКАМЕРЫ(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры, в котором неподвижной фотокамерой с известным фокусным расстояниемпоследовательно через заданный промежуток времениделают первый и второй снимки объекта и находят величину 1 сдвига между его изображениями на втором и первом снимках, затем перемещают камеру по горизонтали на заданное расстояниев направлении, совпадающем с направлением горизонтальной составляющей скорости движения объекта, через промежуток временипосле второго снимка делают третий снимок объекта и находят величину 2 сдвига между его изображениями на третьем и втором снимках, далее через промежуток временипосле третьего снимка при том же положении камеры делают четвертый снимок объекта и находят величину 3 сдвига между 17252 1 2013.06.30 его изображениями на четвертом и третьем снимках, а затем определяют дальностьдо объекта в момент первого снимка, уголмежду направлением его движения и линией горизонта и величинуего скорости в соответствии с выражениями 2 3 Изобретение относится к области информационно-измерительных систем и предназначается для решения задач измерения дальности до движущихся объектов по их цифровым фотографическим изображениям. Известен способ измерения дальности и линейных размеров объектов по их телевизионным изображениям 1, основанный на последовательном формировании двух ТВ-изображений с помощью одной ТВ камеры для разных точек наблюдения, разнесенных между собой на известное расстояние. Недостатком такой системы является невозможность измерять дальность до движущихся объектов. Наиболее близким к предлагаемому изобретению является способ измерения расстояний до объекта 2, обладающего осью симметрии, с использованием двух цифровых фотокамер, разнесенных в пространстве по горизонтали на известное расстояние. Недостатком этого способа является невозможность измерять дальность до движущегося объекта, а также скорость и направление его движения. Задача изобретения - обеспечение возможности измерять дальность до движущегося объекта, а также скорость и направление его движения. Поставленная задача решается путем того, что в способе определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры, подвижной фотокамерой с известным фокусным расстояниемпоследовательно через заданный промежуток времениделают первый и второй снимки объекта и находят величину 1 сдвига между его изображениями на втором и первом снимках, затем перемещают камеру по горизонтали на заданное расстояниев направлении, совпадающем с направлением горизонтальной составляющей скорости движения объекта, через промежуток временипосле второго снимка делают третий снимок объекта и находят величину 2 сдвига между его изображениями на третьем и втором снимках, далее через промежуток временипосле третьего снимка при том же положении камеры делают четвертый снимок объекта и находят величину 3 сдвига между его изображениями на четвертом и третьем снимках,а затем определяют дальностьдо объекта в момент первого снимка, уголмежду направлением его движения и линией горизонта и величинуего скорости в соответствии с выражениями 2 3 17252 1 2013.06.30 Свойство, появляющееся у заявляемого объекта - это обеспечение возможности измерять дальность до движущегося объекта, а также скорость и направление его движения. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя дальности и скорости на основе цифровой фотокамеры. Система содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5, блок перемещения фотокамеры 6. Система работает следующим образом. Предположим, измеряемый объект движется со скоростьюпод углом к линии горизонта(фигура). С помощью цифровой фотокамеры на фотоприемной матрице 4 формируется первое цифровое изображение измеряемого объекта с координатой 1 (фигура). Затем через интервал времени 1 формируется второе цифровое изображение объекта с координатой 2. После этого с помощью блока перемещения 6 фотокамера передвигается в пространстве по горизонтали на расстояние , и из этой точки через интервал времени 2 формируется третье цифровое изображение измеряемого объекта с координатой 3, а через интервал времени 3 - четвертое цифровое изображение объекта с координатой 4. Интервалы времени 1, 2, 3 задаются таймером вычислительного блока. Полученные четыре цифровых изображения поступают в процессор вычислительного блока, где производится измерение расстояния, скорости и угла направления движения объекта по следующему алгоритму. На втором изображении формируется окно сканирования с изображением измеряемого объекта. Автоматически окно сканирования с такими же координатами формируется на первом, третьем и на четвертом снимках. Затем в процессоре осуществляется сканирование окна второго снимка относительно первого снимка и относительно третьего и четвертого снимков. При этом вычисляется значение двухмерной нормированной корреляционной функции между выделенными изображениями. По положению максимального значения нормированной корреляционной функции вычисляются сдвиги между изображениями 121, 232 и 343. Как следует из фигуры, сдвиг между изображениями 2 и 1 объекта, движущегося с горизонтальной скоростью , при первом положении фотокамеры будет определяться только перемещением объекта за время 1. Из геометрии изображений можно записать 11 где- фокусное расстояние фотокамеры,- горизонтальная скорость объекта, - скорость движения объекта,- угол между направлением движения и линией горизонта,- расстояние до объекта в момент первого снимка, 1 - интервал времени между регистрациями первого и второго изображений объекта. Сдвиг между изображениями 3 и 2 объекта при втором положении фотокамеры будет определяться как перемещением объекта за время 2, так и перемещением фотокамеры. Из геометрии изображений можно записать 22 2 где- перемещение фотокамеры, 2 - интервал времени между регистрациями второго и третьего изображений объекта, 2 - расстояние до объекта в момент второго снимка. Знакпередзависит от того, совпадают или нет направление перемещения фотокамеры и направление движения объекта. Будем предполагать, что направление перемещения фотокамеры и направление движения объекта совпадают, в этом случае передбудет знак минус. Сдвиг между изображениями 4 и 3 объекта при втором положении фотокамеры будет определяться только перемещением объекта за время 3. Из геометрии изображений можно записать 3 где 3 - расстояние до объекта в момент третьего снимка, 3 - интервал времени между регистрациями третьего и четвертого изображений объекта. Очевидно, что интервалы между измерениями можно выбрать равными 123. В этом случае разность между расстояниями в моменты фиксации снимков будет равна, т.е. 2, 32, где- расстояние до объекта в момент первого снимка. Система уравнений (1-3) имеет три неизвестных ,и . Решая систему уравнений,определяют горизонтальную скорость движения объекта 21 3(4)(21 3231 2 ) где 121 - сдвиг между изображениями объекта на втором и первом снимках,232 - сдвиг между изображениями объекта на третьем и втором снимках, 343 сдвиг между изображениями объекта на четвертом и третьем снимках. Расстояние до объекта в момент первого снимкабудет равно 2 3(21 3231 2 ) Разность между расстояниями в моменты фиксации снимковбудет равна(13 )(21 3231 2 ) Затем из системы уравненийиопределяются угол направления движенияи скорость(13 )21 3(7)(21 3231 2 )21 3 Таким образом, в результате анализа четырех цифровых фотографических изображений, полученных с двух точек пространства, разнесенных по горизонтали на известное расстояние, обеспечивается возможность измерять дальность до движущегося объекта,скорости движения, а также угол направления движения. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01P 3/00, G01C 23/00, G01C 3/00
Метки: определения, способ, фотокамеры, объекта, цифровой, движущегося, дальности, скорости, посредством
Код ссылки
<a href="https://by.patents.su/4-17252-sposob-opredeleniya-dalnosti-do-dvizhushhegosya-obekta-i-ego-skorosti-posredstvom-cifrovojj-fotokamery.html" rel="bookmark" title="База патентов Беларуси">Способ определения дальности до движущегося объекта и его скорости посредством цифровой фотокамеры</a>
Способ определения дальности до объекта и его скорости посредством цифровой фотокамеры
Номер патента: 16674
Опубликовано: 30.12.2012
Автор: Козлов Владимир Леонидович
Метки: фотокамеры, цифровой, дальности, скорости, посредством, способ, объекта, определения
Текст:
...) Свойство, появляющееся у заявляемого объекта, - это обеспечение возможности измерять дальность до движущихся объектов, а также скорость их движения. Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя дальности и скорости на основе цифровой фотокамеры. Система содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, вычислительный блок 5,...
Способ определения дальности до объекта и его скорости
Номер патента: 11960
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01S 17/00, G01C 3/08, G01P 3/36...
Метки: объекта, дальности, определения, скорости, способ
Текст:
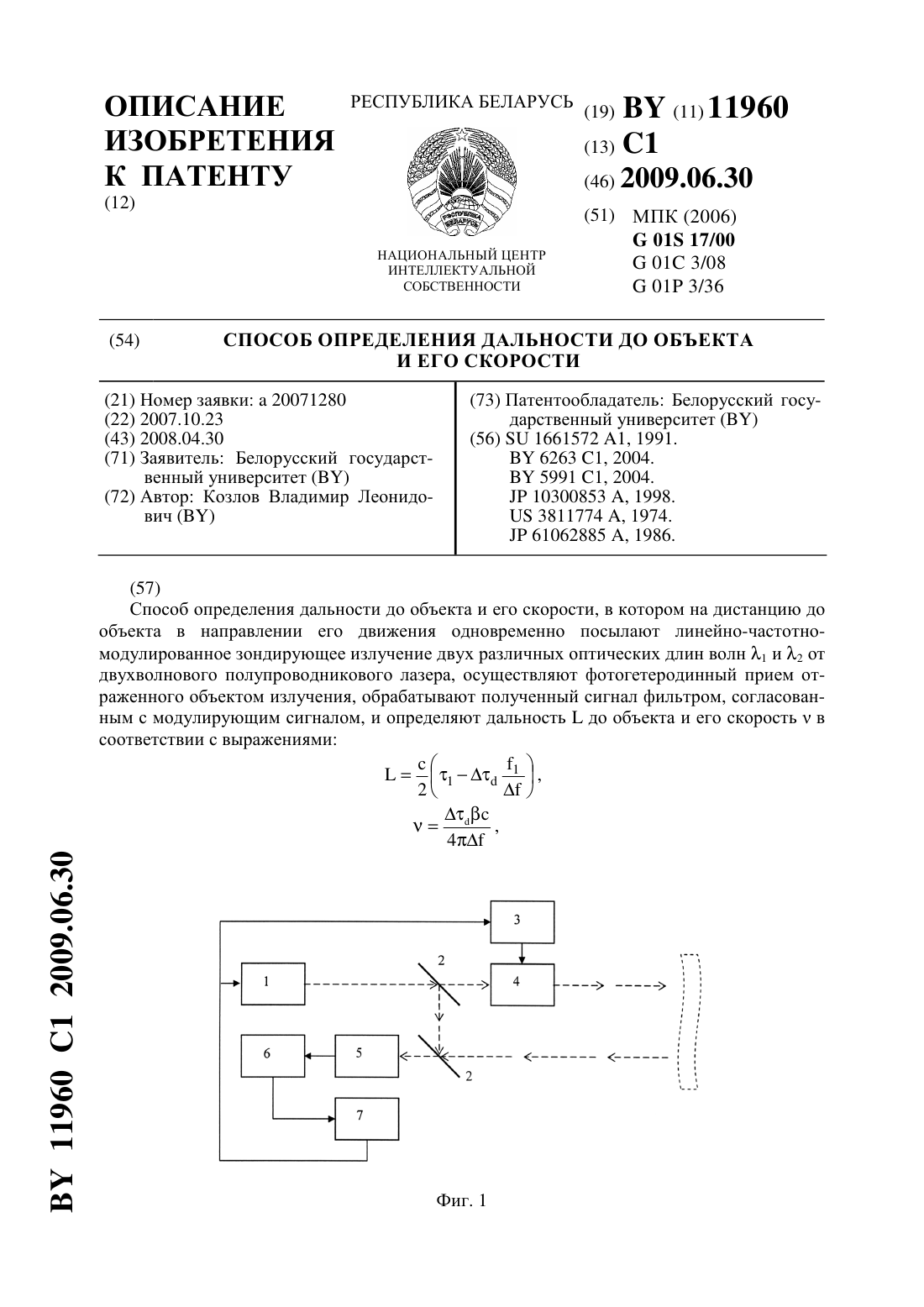
...Для обеспечения возможности одновременного определения за один зондирующий импульс дальности и скорости объекта в качестве источника зондирующего излучения предлагается использовать двухволновой инжекционный полупроводниковый лазер 2,обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных диодов 3 достигает значений 20-100 нм....
Способ определения дальности до объекта и его скорости
Номер патента: 13509
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
Метки: способ, скорости, объекта, дальности, определения
Текст:
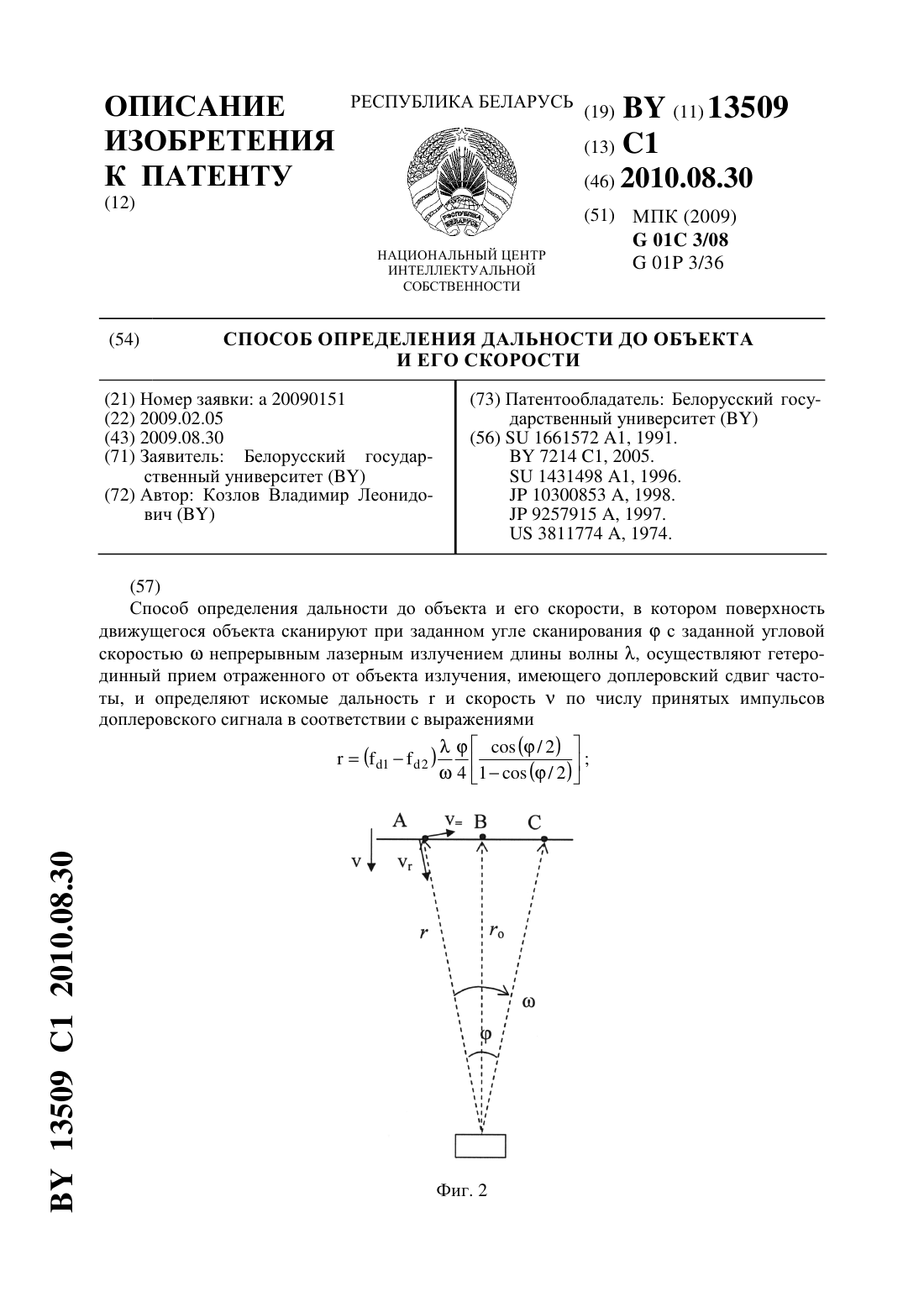
...неподвижна, поэтому отраженное от поверхности оптическое излучение будет сдвигаться по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , обусловленную только сканированием поверхности лазерным лучом, мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,скорость света,- длина волны...
Дальномер на цифровой фотокамере
Номер патента: U 7668
Опубликовано: 30.10.2011
Автор: Козлов Владимир Леонидович
МПК: G01C 3/00
Метки: фотокамере, цифровой, дальномер
Текст:
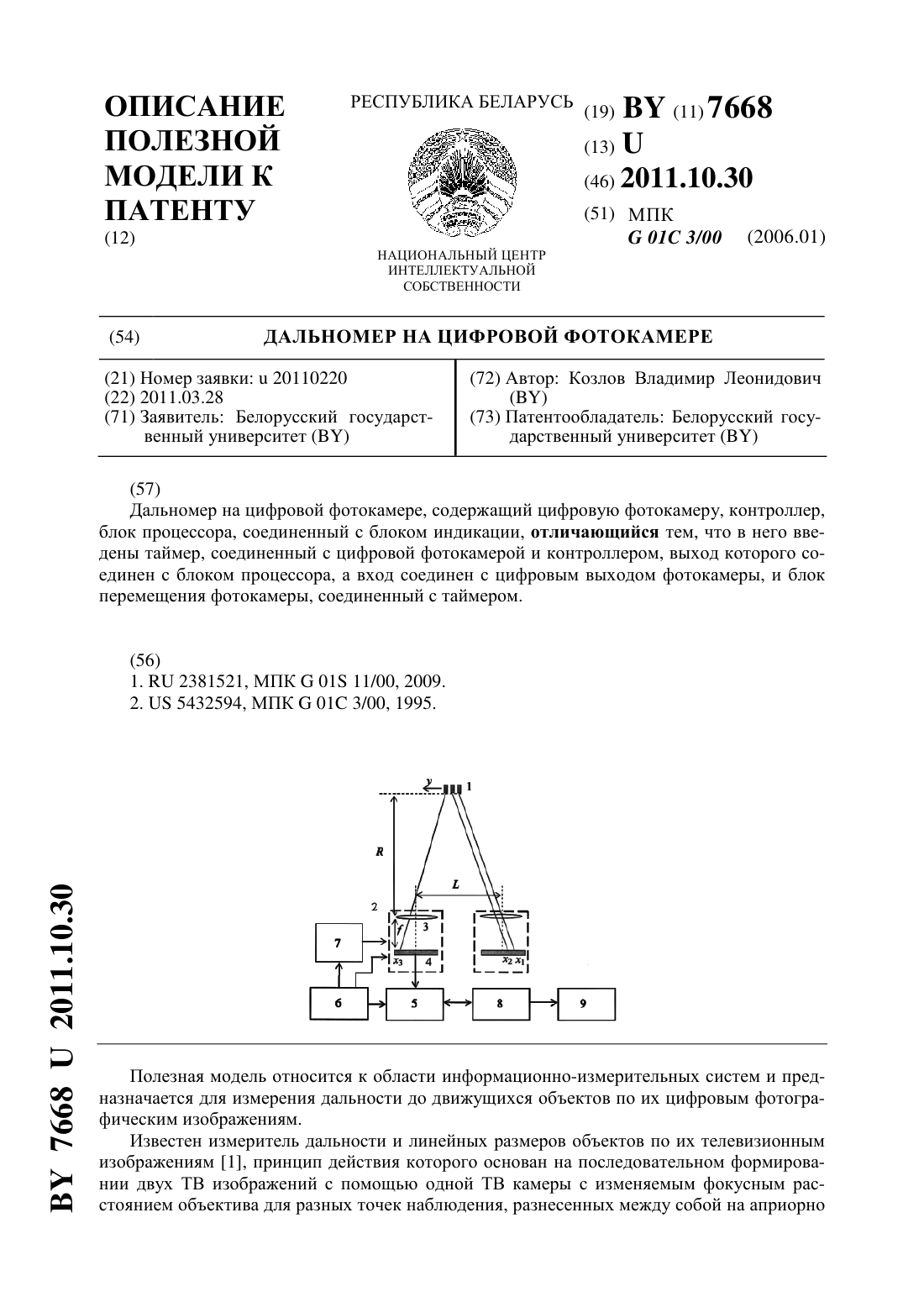
...пространства, разнесенных по горизонтали на известное расстояние. Сущность полезной модели поясняется с помощью фигуры, на которой представлена функциональная схема дальномера на цифровой фотокамере. Устройство содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, контроллер 5, таймер 6, блок перемещения фотокамеры 7, процессор 8, блок индикации 9. Измеритель расстояний работает следующим...
Способ определения дальности до объекта, его высоты и ширины
Номер патента: 16007
Опубликовано: 30.06.2012
Авторы: Кузьмичев Илья Романович, Козлов Владимир Леонидович
Метки: высоты, ширины, способ, объекта, определения, дальности
Текст:
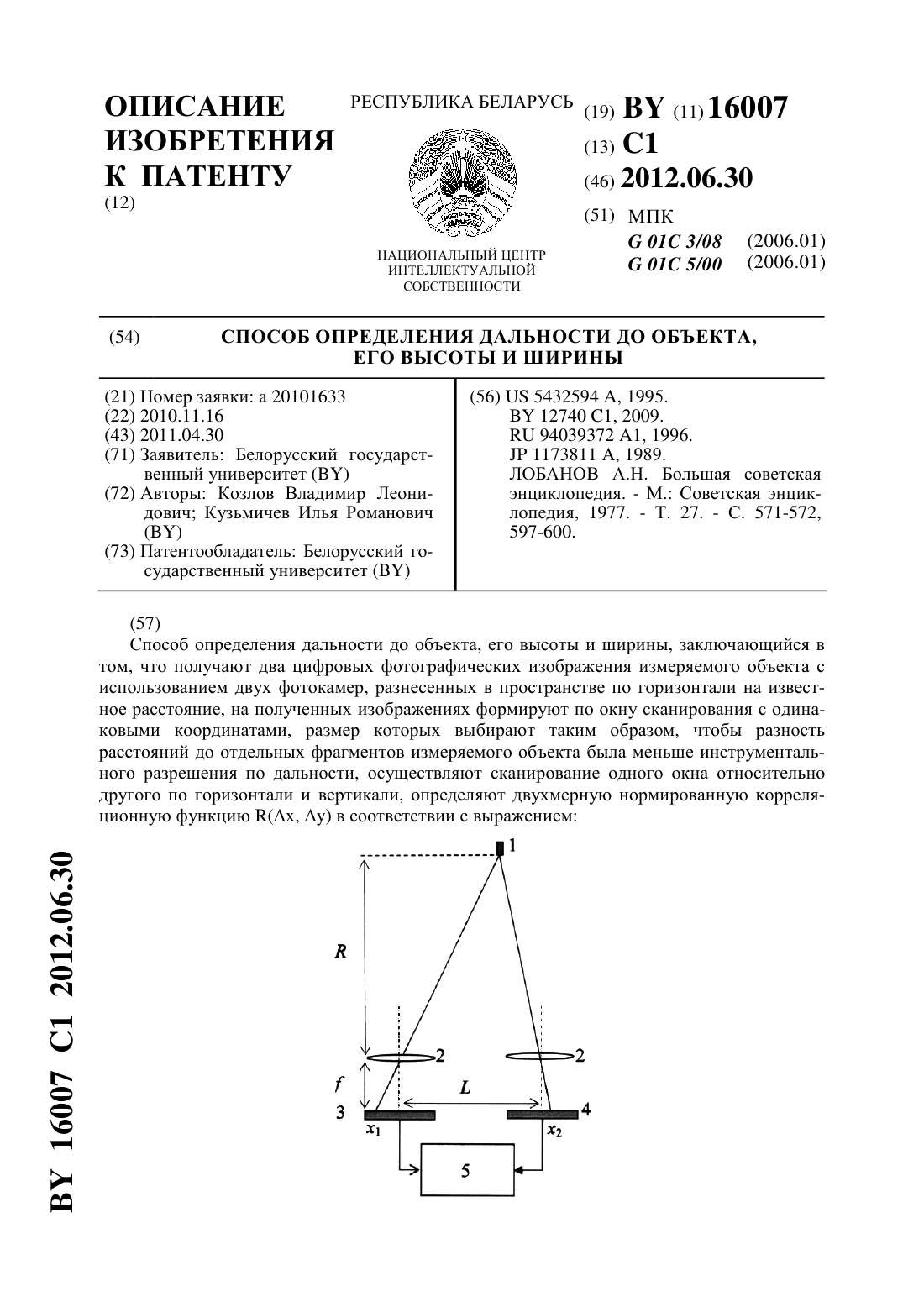
...горизонтали и вертикали соответственно. Свойство, появляющееся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное тем, что за счет выбора соответствующего размера сканирующего окна достигается максимальное значение корреляционной функции, а следовательно, большая точность определения сдвига между изображениями. Так как вычисляется двухмерная корреляционная функция и осуществляется ее нормировка, то устраняется...
Предыдущий патент: Способ определения расстояния до объекта
Следующий патент: Устройство передачи данных
Случайный патент: Плита статора линейного шагового двигателя