Способ селекции радиолокационных целей
Номер патента: 16978
Опубликовано: 30.04.2013
Авторы: Грищенков Максим Леонидович, Васковская Лидия Федоровна, Короленко Владимир Анатольевич, Галуза Алексей Сергеевич
Текст
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ(71) Заявитель Открытое акционерное общество АГАТ - системы управления - управляющая компания холдинга Геоинформационные системы управления(72) Авторы Васковская Лидия Федоровна Галуза Алексей Сергеевич Грищенков Максим Леонидович Короленко Владимир Анатольевич(73) Патентообладатель Открытое акционерное общество АГАТ - системы управления - управляющая компания холдинга Геоинформационные системы управления(57) Способ селекции радиолокационных целей, характеризующийся тем, что в зоне радиолокационного пространства с повышенной плотностью целей экстраполируют положение стробов сопровождаемых целей на момент поступления входных отметок целей,отбирают в стробы отметки, удаленные от центра соответствующего строба на расстояние, не превышающее его размеры, и выделяют среди них одну отметку с минимальным удалением от центра строба для формирования траектории цели, причем предварительно осуществляют смещение входных отметок и стробов по дальности в сторону ее увеличения от точки стояния радиолокационной станции на одинаковую величину при неизменном азимуте, а отбор отметок в стробы и выделение одной отметки в стробе осуществляют по смещенным координатам отметок и стробов. Изобретение относится к радиолокации и может быть использовано в радиолокационной станции (РЛС) и в автоматизированных системах обработки радиолокационной информации (РЛИ), формирующих трассы по обнаруженным отметкам. Известен способ селекции сигналов радиолокационных целей в стробе сопровождения, при котором экстраполируют положение стробов сопровождаемых целей на момент поступления входных отметок целей, отбирают в стробы отметки, удаленные от центра соответствующего строба на расстояние, не превышающее его размеры, и выделяют среди них одну отметку с минимальным удалением от центра строба. Недостатком известного способа является то, что в ближней зоне РЛС недостаточная достоверность формирования траекторий целей (велика вероятность перепутывания траекторий и формирования ложных траекторий). Известный способ наиболее близок по технической сущности к заявляемому способу и является его прототипом. 16978 1 2013.04.30 Технической задачей изобретения является повышение качества обработки РЛИ. Поставленная задача решена со следующим техническим результатом - повышена достоверность формирования траекторий целей за счет снижения вероятности перепутывания траекторий и уменьшения количества ложных траекторий. Для достижения указанного технического результата применяют заявляемый способ селекции радиолокационных целей, а именно в зоне радиолокационного пространства с повышенной плотностью целей экстраполируют положение стробов сопровождаемых целей на момент поступления входных отметок целей, отбирают в стробы отметки, удаленные от центра соответствующего строба на расстояние, не превышающее его размеры, и выделяют среди них одну отметку с минимальным удалением от центра строба для формирования траектории цели, причем предварительно осуществляют смещение входных отметок и стробов по дальности в сторону ее увеличения от точки стояния радиолокационной станции на одинаковую величину при неизменном азимуте, а отбор отметок в стробы и выделение одной отметки в стробе осуществляют по смещенным координатам отметок и стробов. Заявляемый способ селекции радиолокационных целей выполняют следующим образом. Обработку данных осуществляют в заданной зоне радиолокационного пространства РЛС. В качестве заданной зоны выбирают область пространства с повышенной плотностью целей, чаще всего ближнюю зону РЛС. Входные отметки обнаруженных целей прежде всего проверяют на принадлежность к заданной зоне пространства. Отметки с отрицательным исходом проверки обрабатываются известными способами, а с положительным исходом - заявляемым способом. Пусть заданы следующие исходные данные в качестве заданной зоны определена ближняя зона РЛС 1 - индекс входной отметки, находящейся в заданной зоне 1 - индекс сопровождаемой цели местоположение -й отметки определено в полярной системе координат - дальностьи азимут . Тогда данные каждой -й отметки обрабатываются следующим образом 1) фиксируют время поступления -й отметки 2) в полярных координатах принятой отметки ( и ) увеличивают дальностьна заданную величину, азимутсохраняют неизменным (т.е. осуществляют смещение отметки по дальности) и затем определяют смещенные декартовые координаты отметки Хотмсмещ, отмсмещ 3) экстраполируют на момент поступления -й отметки координаты центров всех -х сопровождаемых целей, затем положения центров (экстраполированные) в полярной системе координат смещают по дальности на ту же величину, что и дальность -й отметки. В результате рассчитывают декартовые координаты смещенных центров стробов э. смещ,э. смещ 4) выполняют для -й отметки селекцию -х стробов сопровождения по одновременному выполнению условий Хсмещстр. смещстр.,где стр., стр. - размеры стробов сопровождения по осям координат , декартовой системы координат Хсмещ, смещ - удаление -й отметки от центра строба -й цели по осям координат 16978 1 2013.04.30 смещ.отм. смещ.э.смещ.,смещ.отм. смещ.э.смещ.5) из числа отметок, попавших в результате действий 4) в строб каждой -й цели выбирают одну единственную отметку, ближайшую к центру соответствующего ей строба, по которой в дальнейшем рассчитывают вторичные параметры цели (скорость, курс, сглаженные координаты и т.д.). В действиях 2)-4) по мере необходимости производят по известным формулам взаимное преобразование координат между полярной и декартовой системами. Основное отличие заявляемого способа состоит в смещении по дальности в сторону ее увеличения принятых отметок, принадлежащих заданной зоне, и отождествляемых с ними сопровождаемых экстраполированных целей, а также в отборе отметок в стробы целей и выборе (селекции) единственной отметки в стробе каждой цели по смещенным координатам отметок и стробов. При увеличении дальности (и сохранении неизменными значений азимутов) принятых отметок и экстраполированных положений целей, в силу расхождения азимутальных линий по мере их удаления от точки стояния РЛС, увеличиваются расстояния как между отметками, так и между сопровождаемыми целями. Увеличение расстояний между отметками снижает вероятность перепутываний при привязке отметок к целям. Увеличение расстояний между целями при сохранении постоянных размеров стробов, не зависящих от дальности, снижает вероятность попадания одной и той же отметки в несколько стробов целей, что снижает вероятность формирования ложных траекторий. Заявляемый способ селекции радиолокационных целей обеспечивает высокую достоверность формирования траекторий целей в ближней зоне РЛС благодаря качественному отбору отметок. Источники информации 1. Патент 2052836, МПК 601 13/02, 13/72, 1996 (прототип). Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: G01S 13/66
Метки: целей, селекции, радиолокационных, способ
Код ссылки
<a href="https://by.patents.su/3-16978-sposob-selekcii-radiolokacionnyh-celejj.html" rel="bookmark" title="База патентов Беларуси">Способ селекции радиолокационных целей</a>
Устройство радиолокационного сопровождения целей
Номер патента: 14711
Опубликовано: 30.08.2011
Авторы: Галуза Алексей Сергеевич, Друзь Юрий Дмитриевич, Васковская Лидия Федоровна, Короленко Владимир Анатольевич
МПК: G01S 13/66
Метки: сопровождения, целей, радиолокационного, устройство
Текст:
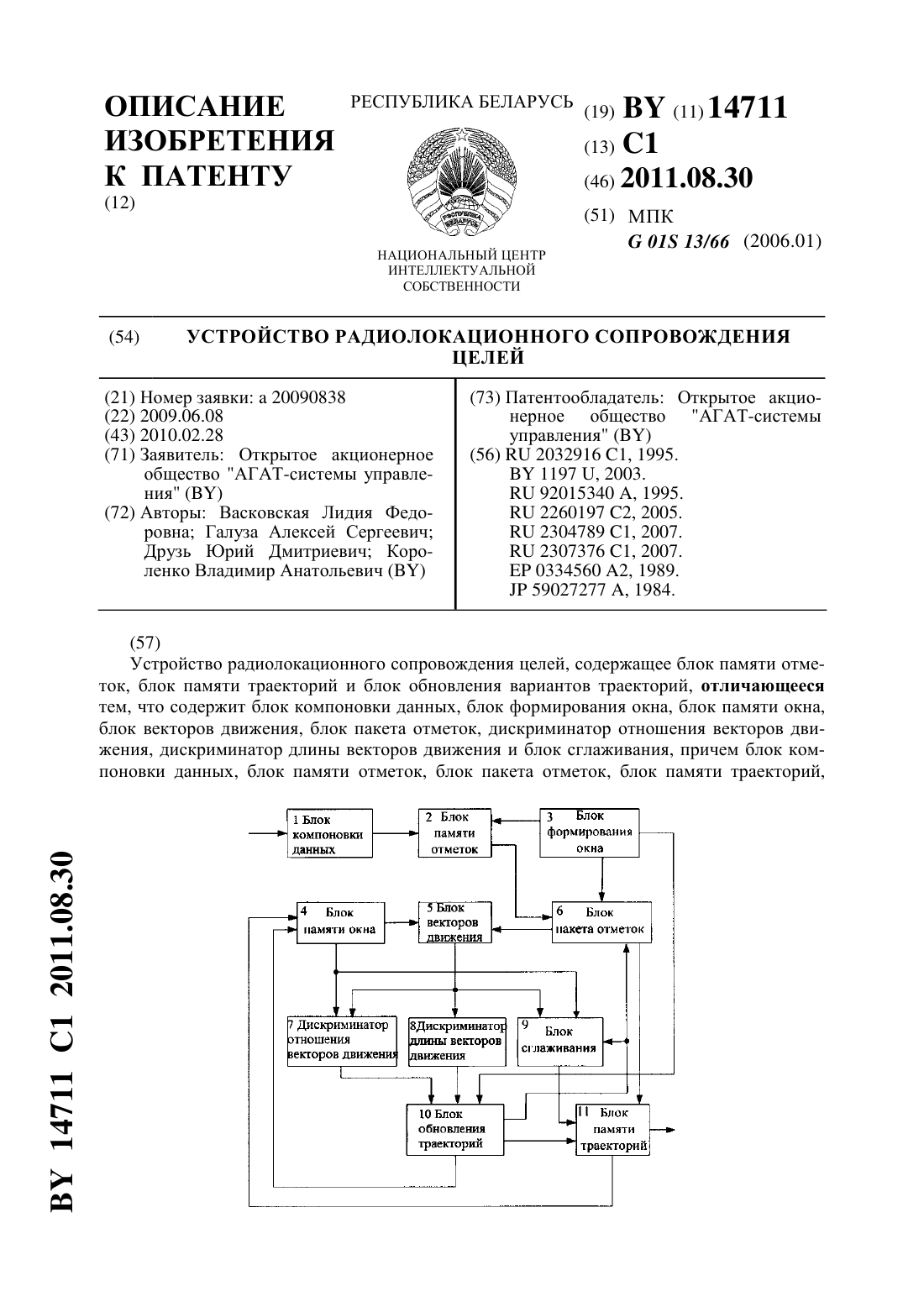
...на блок 5 векторов движения и мультиплексным выходом на блок 11 памяти траекторий. Дискриминатор 7 отношения векторов движения сравнивает с заданной точностью значения пакета входных векторов, результаты передает на вход блока 10 обновления траекторий. Дискриминатор 8 длины векторов движения определяет отношение длины расчетных векторов (пакета векторов от блока 5) с константой допустимого значения длины векторов. Выход дискриминатора 8...
Способ сопровождения целей и устройство для его реализации
Номер патента: 16975
Опубликовано: 30.04.2013
Авторы: Каранчук Елена Олеговна, Короленко Владимир Анатольевич, Галуза Алексей Сергеевич, Васковская Лидия Федоровна
МПК: G01S 13/72
Метки: сопровождения, реализации, устройство, способ, целей
Текст:
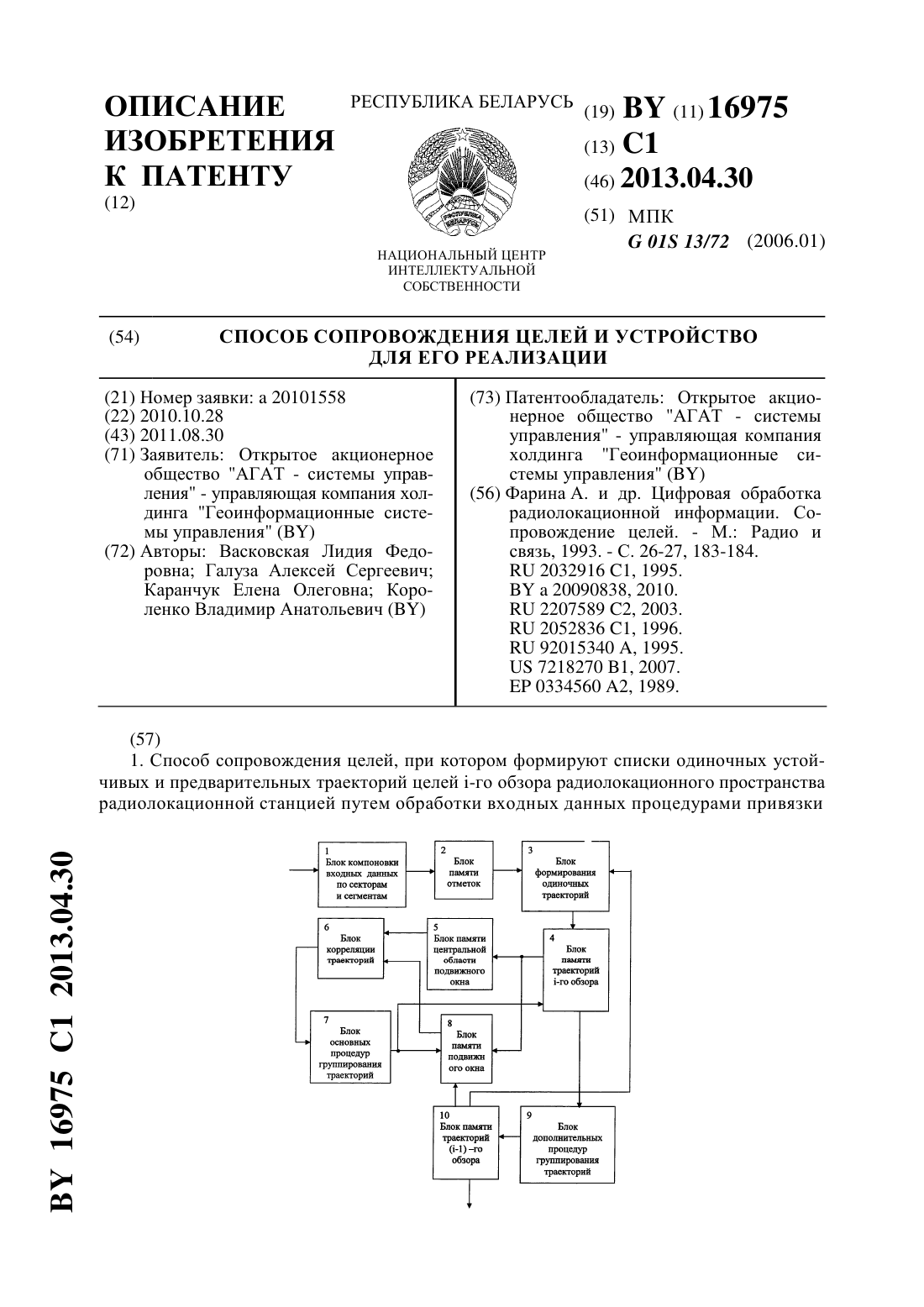
...подвижного окна (-1)-го обзора по критерию равенства вектора движения одиночной траектории с обобщенным вектором движения групповой траектории. При положительном исходе проверки на корреляцию одиночную траекторию вместе с обобщенным вектором движения коррелирующей с ней групповой траектории вносят в список групповых устойчивых траекторий -го обзора. После каждого положительного исхода процедуры привязки повторяют процедуру включения...
Способ селекции свиней по комплексу репродуктивных качеств
Номер патента: 8272
Опубликовано: 30.08.2006
Авторы: Епишко Татьяна Ивановна, Курак Ольга Павловна, Шейко Иван Павлович
МПК: A01K 67/02
Метки: селекции, качеств, способ, свиней, комплексу, репродуктивных
Текст:
...определяют многоплодие, молочность, массу гнезда, количество поросят при отъеме. Затем берут, например, третью группу свиней в количестве 20 голов со следующими показателями продуктивности. Масса Количество поросят гнезда, кг при отъеме, гол 191,2 9 189,5 8 190,3 10 192,7 10 190,1 9 190,5 9 189,7 9 189,6 8 188,4 9 188,8 8 189,8 8 191,2 8 193,2 9 190,1 8 185,4 7 190,0 9 186,7 7 184,1 8 188,5 9 198,4 8 189,9 8,5 8272 1 2006.08.30...
Способ селекции свиней
Номер патента: 8506
Опубликовано: 30.10.2006
Авторы: Епишко Татьяна Ивановна, Шейко Иван Павлович, Курак Ольга Павловна, Федоренкова Лидия Алексеевна
МПК: A01K 67/02
Метки: способ, селекции, свиней
Текст:
...корреляции (общепринятыми методами, например Г.Ф. Лакин, 1973 г.) между анализируемыми признаками. Результаты записывают в виде матрицы 1 0,4373994 0,217012 0,124122 0,005682 0,247869 0,091087 0,4373994 1 0,245421 0,592733 0,113093 0,283743 0,159036 0,217012 0,245421 1 0,379306 0,239368 0,062122 0,475561 0,124122 0,592733 0,379306 1 0,502006 0,200322 0,109552 0,005682 0,113093 0,239368 0,502006 1 0,558018 0,229608 0,247869 0,283743 0,062122...
Способ селекции свиней по комплексу откормочных и мясных качеств
Номер патента: 8271
Опубликовано: 30.08.2006
Авторы: Шейко Иван Павлович, Курак Ольга Павловна, Епишко Татьяна Ивановна
МПК: A01K 67/02
Метки: откормочных, мясных, комплексу, качеств, селекции, способ, свиней
Текст:
...97 28,5 10,4 28,1 189 714 3,38 96 31,8 10,2 26,9 187 713 3,68 97 25,8 9,8 27,15 187 711 3,7 95 32,8 10,3 28,3 188 713 3,42 97 28,5 10,4 26,8 199 676 3,4 98 26,9 10,5 27,6 192 702 3,65 97 24,4 10,7 28,7 192 700 3,69 95 32,1 10,6 27,36 190 680 3,69 97 25,5 10,2 27,6 191 631 3,8 95 37 11,1 28,3 187 730 3,37 96 33,8 10,5 27,1 191 701 3,7 97 24,3 10,7 29,7 2 Возраст досЗатраты СреднесуДлина Толщина Масса Площадь тижения жикорма на 1 точный туши,...
Предыдущий патент: Способ фотодинамической терапии цервикальной эктопии
Следующий патент: Способ получения метансульфоната 4-[(4-метил-1-пиперазинил)метил]-N-[4-метил-3-{[4-(3-пиридинил)-2-пиримидинил]амино}фенил]бензамида
Случайный патент: Колесо транспортного средства