Всенаправленная система тревожной сигнализации транспортного средства
Номер патента: U 10291
Опубликовано: 30.08.2014
Авторы: ЧИУ, Чэн-Юй, ЛИ, Вэй, ЛЯО, Дэ-Жэнь, ФАН, Хуа-Инь, ЛИН, Фон-Жэнь, ЧАН, Чи-Хань, ХУН, Сяо-Сынь, ЧИН, Пэй-Хань, ЦАЙ, Пи-Су, ЧАН, Шунь-Чи, ХУАН, Чи-Вэй, ЧЭНЬ, Чиэнь-Син, ЛИ, Юн-Пин, СУНЬ, Чиа-Ян
Текст
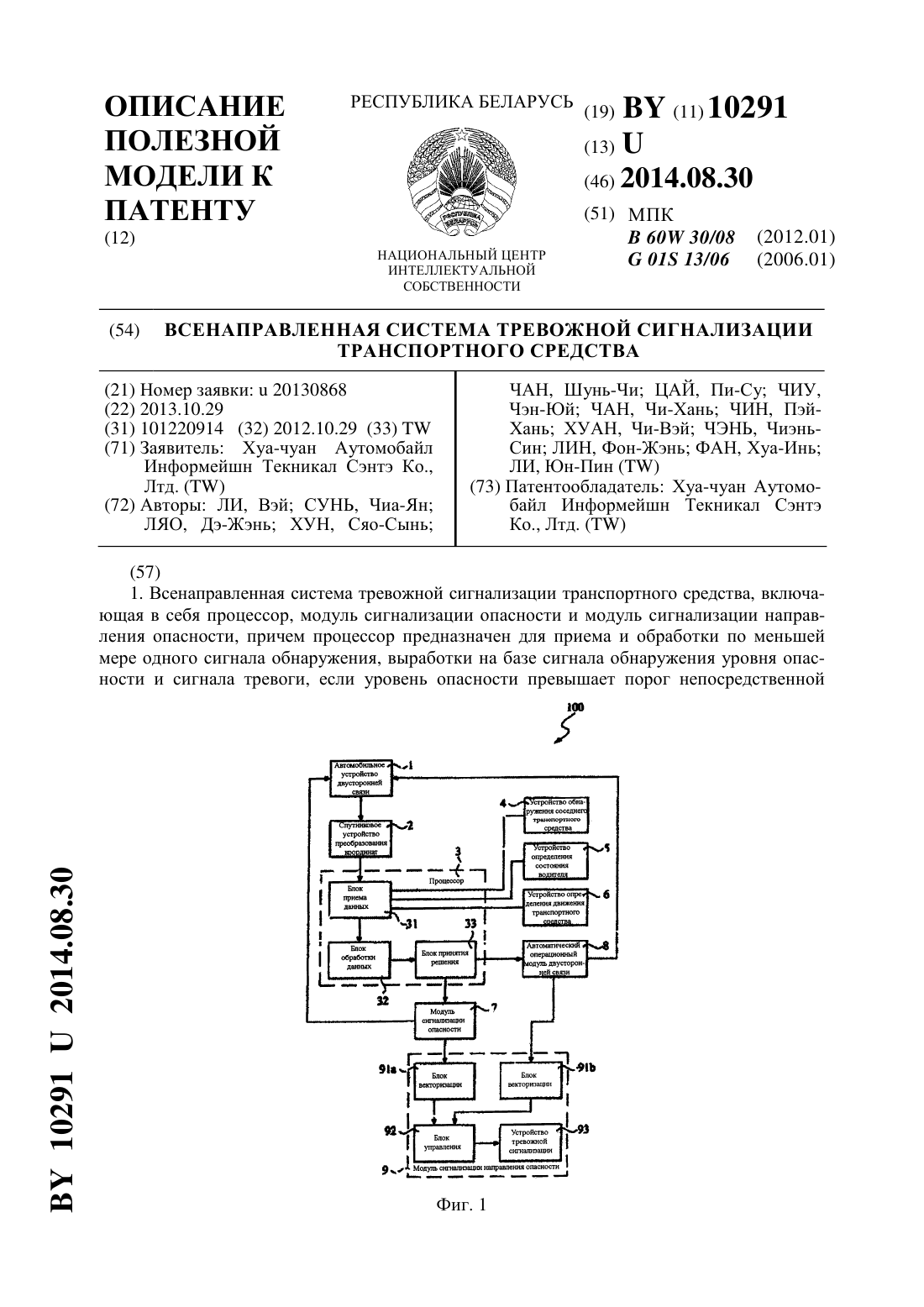
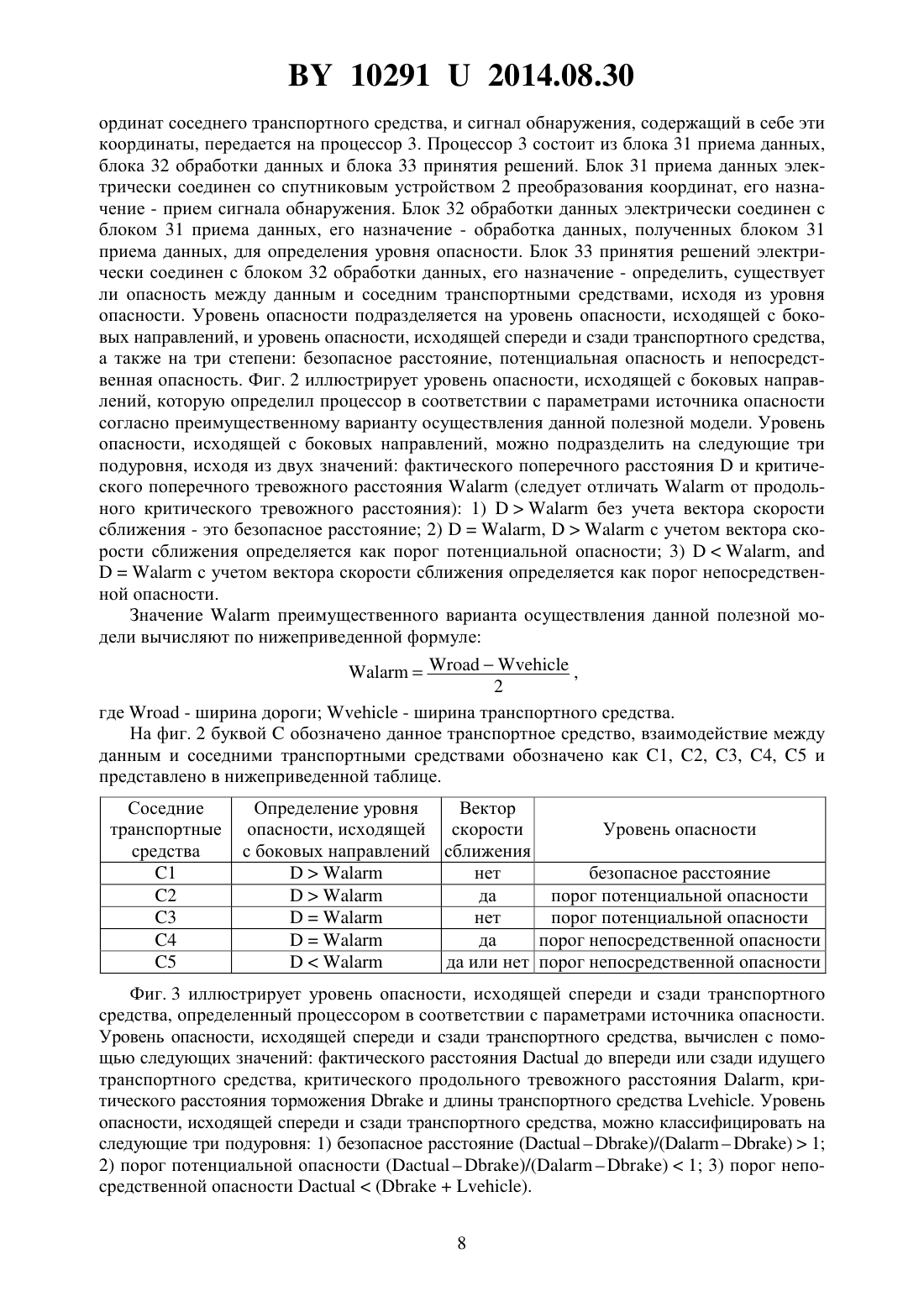
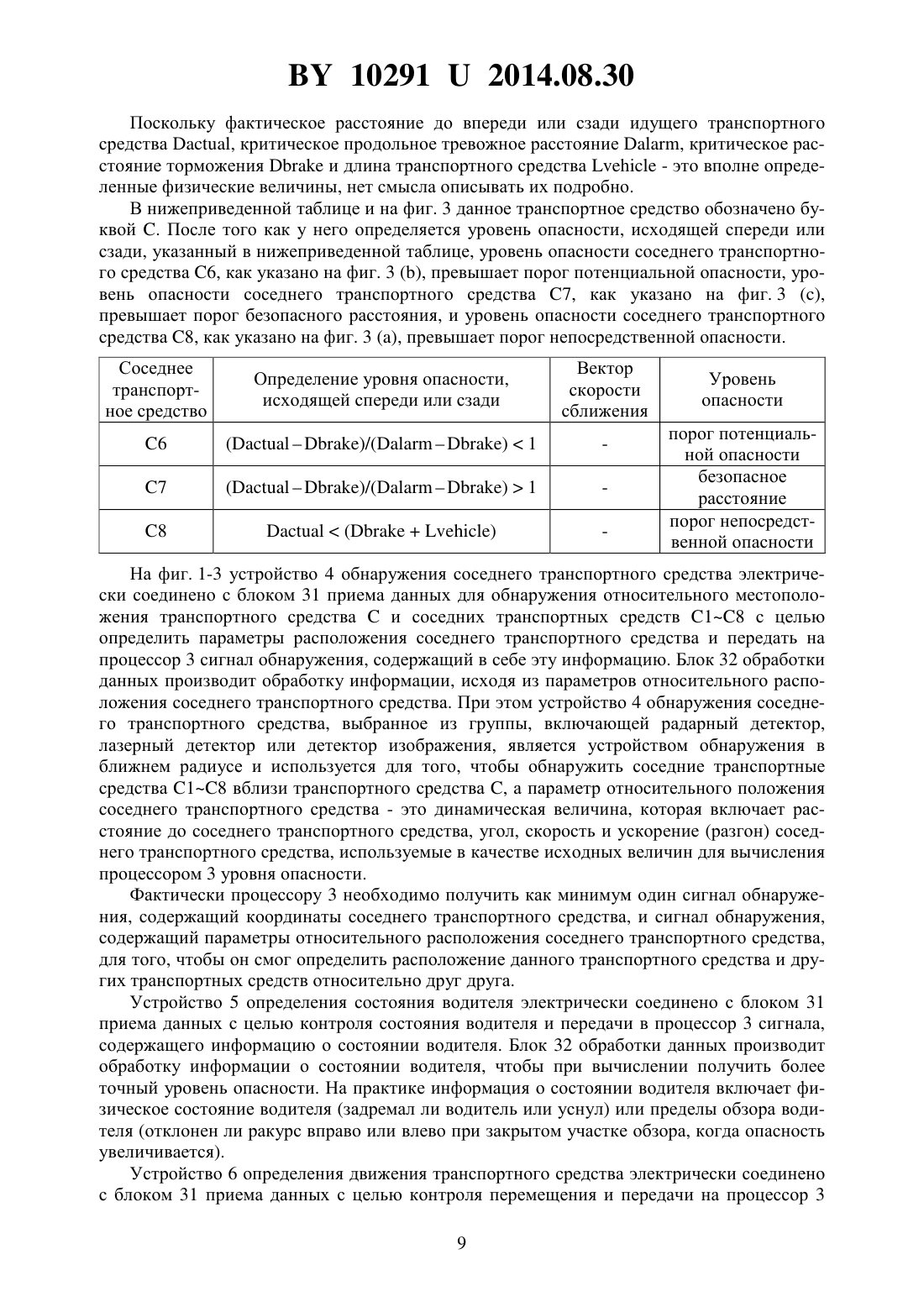
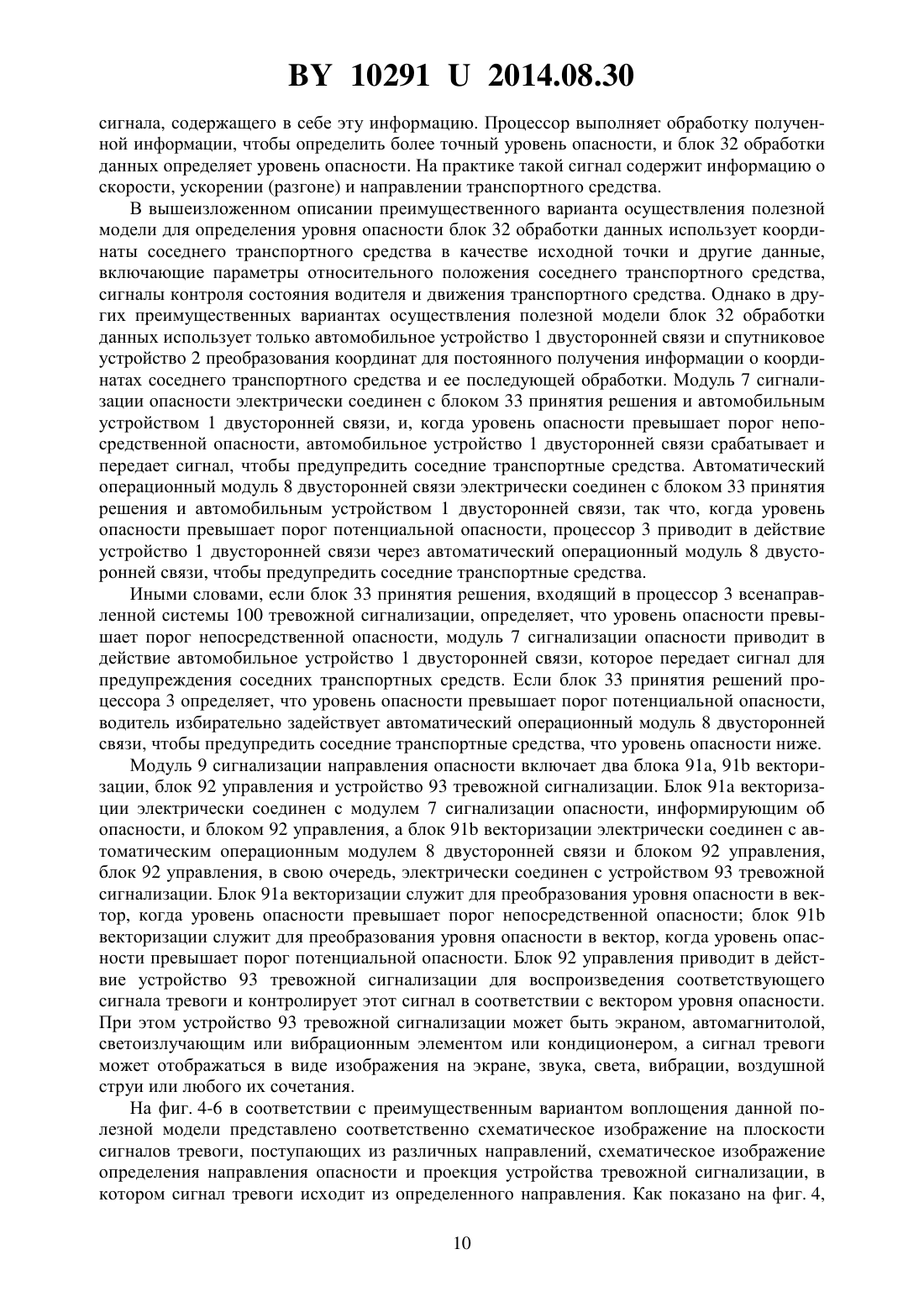
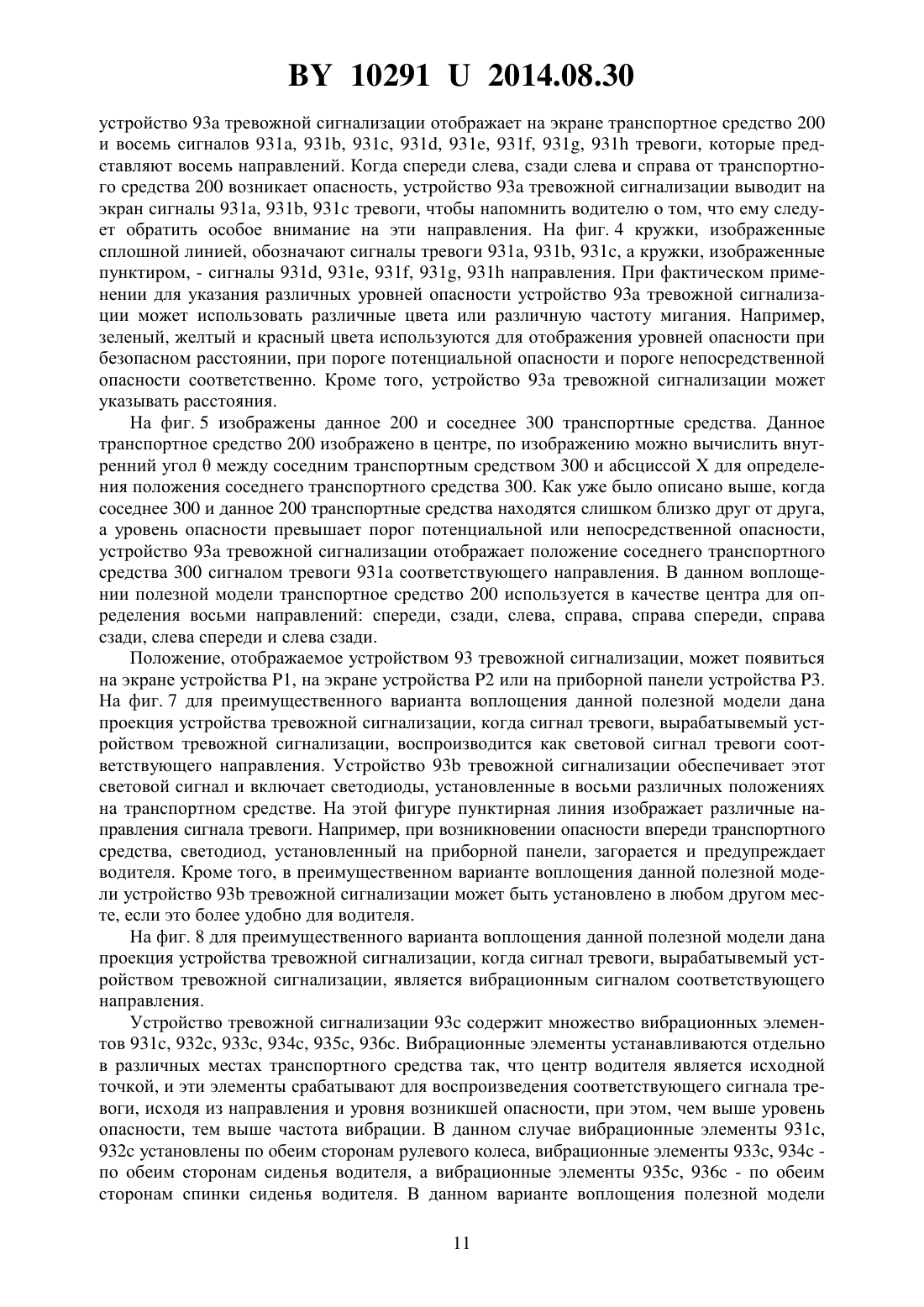
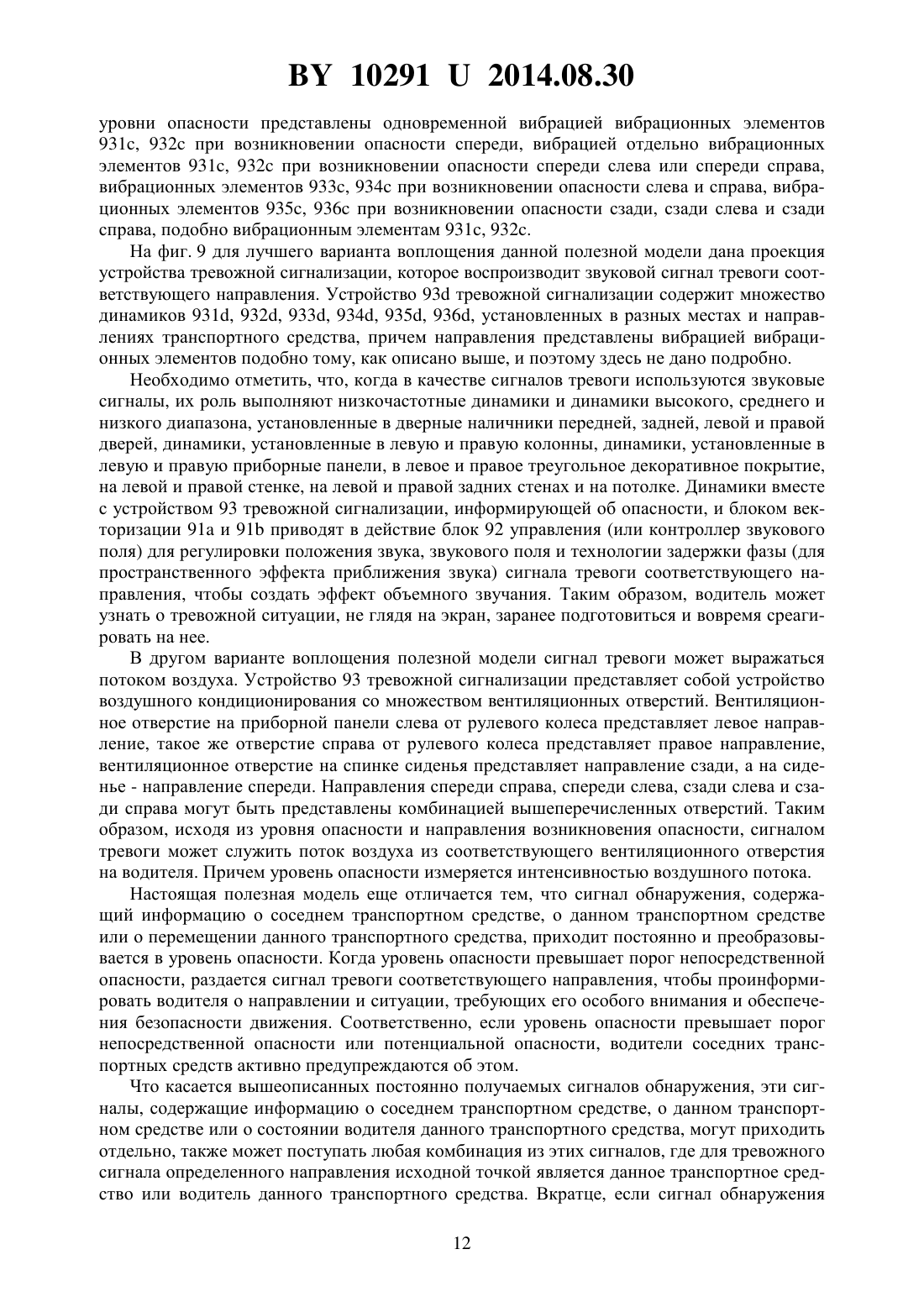
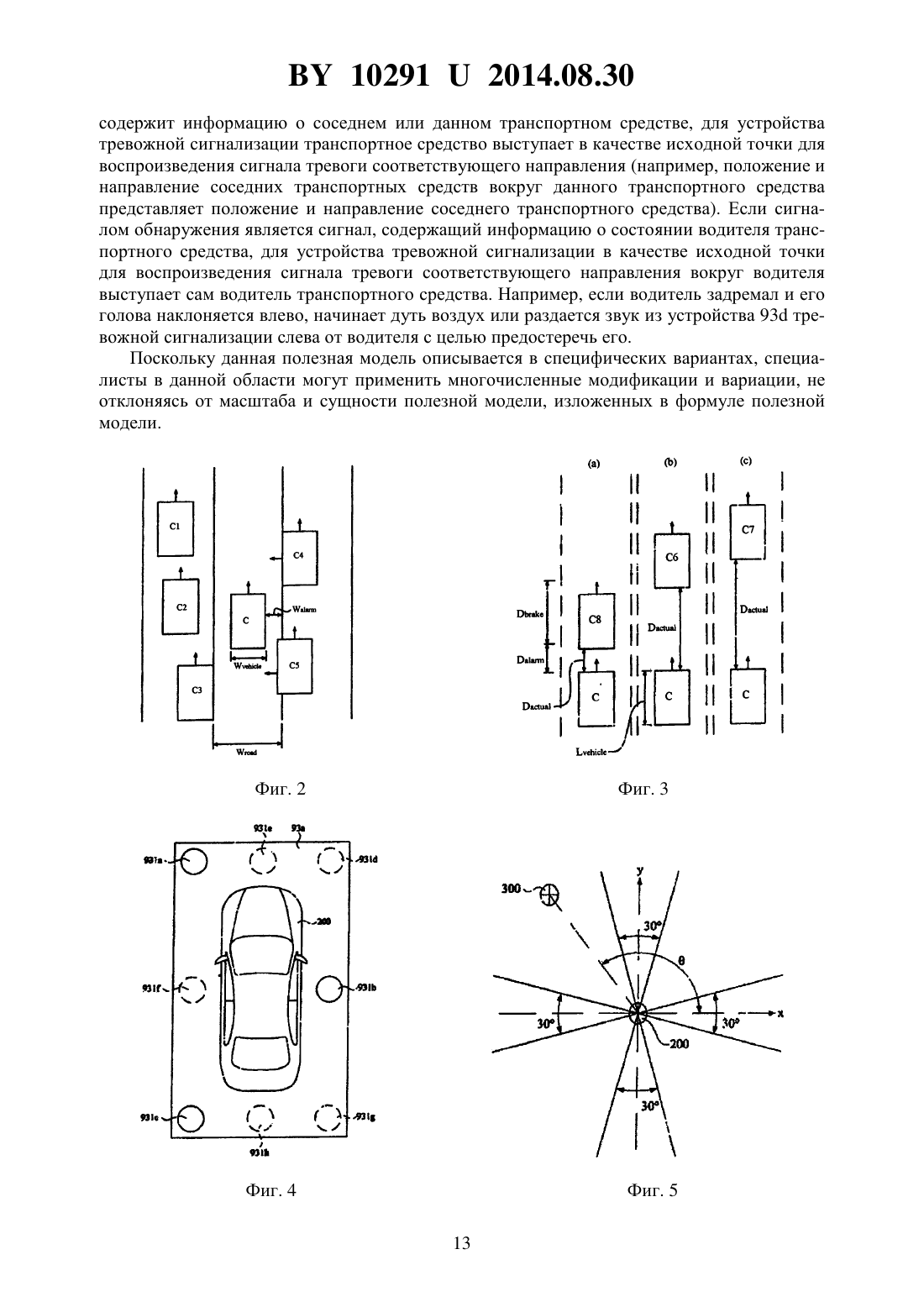
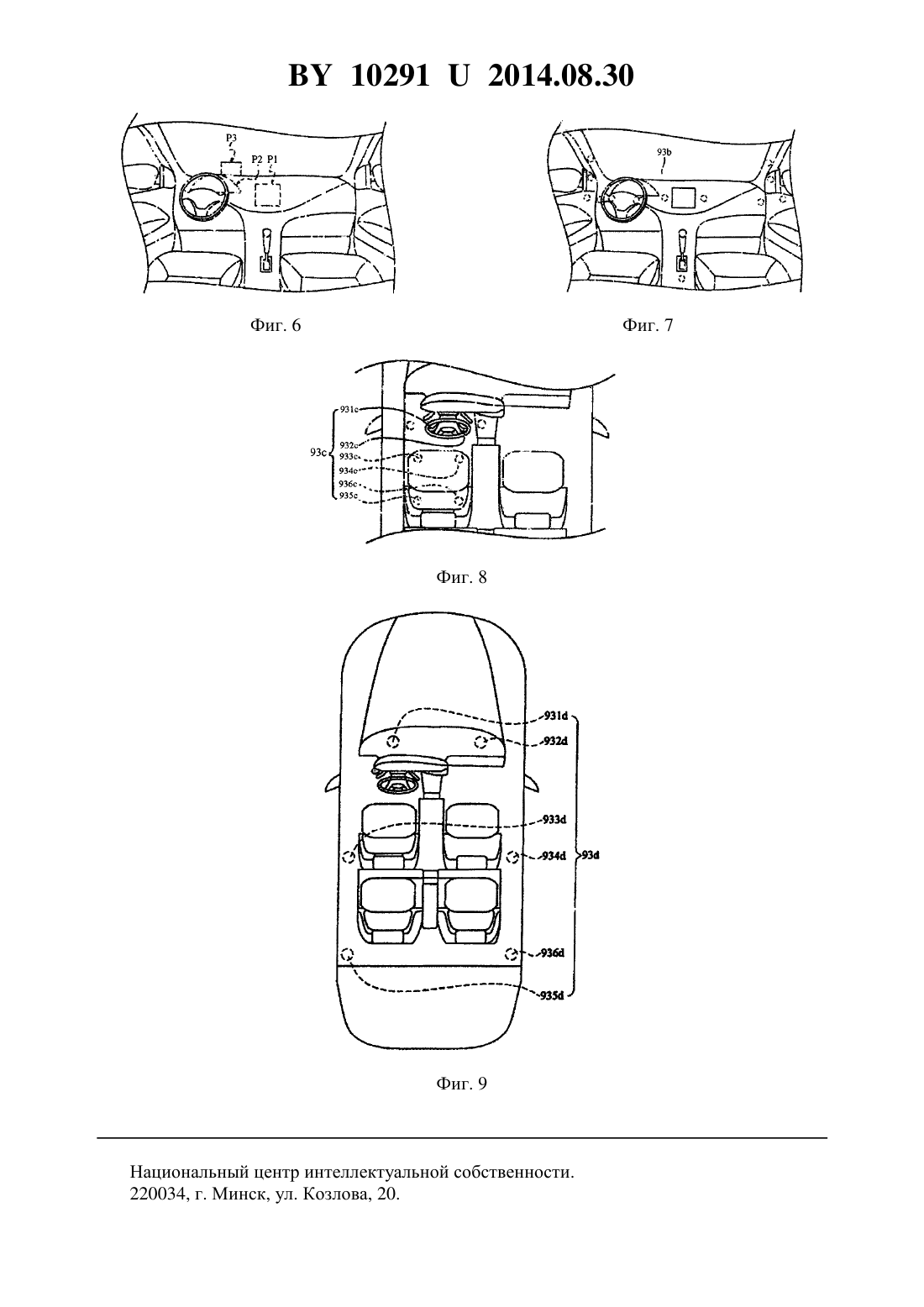
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ВСЕНАПРАВЛЕННАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Хуа-чуан Аутомобайл Информейшн Текникал Сэнтэ Ко.,Лтд.(73) Патентообладатель Хуа-чуан Аутомобайл Информейшн Текникал Сэнтэ Ко., Лтд.(57) 1. Всенаправленная система тревожной сигнализации транспортного средства, включающая в себя процессор, модуль сигнализации опасности и модуль сигнализации направления опасности, причем процессор предназначен для приема и обработки по меньшей мере одного сигнала обнаружения, выработки на базе сигнала обнаружения уровня опасности и сигнала тревоги, если уровень опасности превышает порог непосредственной 102912014.08.30 опасности, модуль сигнализации опасности электрически соединен с процессором и предназначен для приема сигнала тревоги и передачи сигнала запуска, а модуль сигнализации направления опасности электрически соединен с модулем сигнализации опасности и предназначен для выработки знака направления сигнала тревоги на базе сигнала запуска. 2. Система сигнализации по п. 1, отличающаяся тем, что также включает в себя автомобильное устройство двусторонней связи и спутниковое устройство преобразования координат, причем автомобильное устройство двусторонней связи предназначено для передачи сигнала обнаружения, который включает в себя сигнал двусторонней связи между данным транспортным средством и соседним транспортным средством, а спутниковое устройство преобразования координат электрически включено между автомобильным устройством двусторонней связи и процессором и предназначено для выработки значения координат соседнего транспортного средства на базе сигнала двусторонней связи и передачи в процессор сигнала обнаружения, несущего значение координат соседнего транспортного средства, причем процессор выполнен также с возможностью выработки уровня опасности на базе значения координат соседнего транспортного средства. 3. Система сигнализации по п. 2, отличающаяся тем, что модуль сигнализации опасности электрически соединен с автомобильным устройством двусторонней связи, предназначенным для передачи сигнала обнаружения, при этом модуль сигнализации опасности выполнен также с возможностью выработки сигнала двусторонней связи для предупреждения соседнего транспортного средства, когда уровень опасности превышает порог непосредственной опасности. 4. Система сигнализации по п. 2, отличающаяся тем, что сигнал двусторонней связи выбран из группы, включающей сигнал выделенной связи малой дальности , сигнал беспроводной связи высокоскоростной передачи данных , сигнал беспроводного Интернета (-), сигнал мобильной связи третьего поколения (3) и сигнал универсальной беспроводной связи на большие расстояния . 5. Система сигнализации по п. 2, отличающаяся тем, что также включает в себя автоматический операционный модуль двусторонней связи, который электрически включен между процессором и автомобильным устройством двусторонней связи, при этом автомобильное устройство двусторонней связи выполнено с возможностью передачи сигнала двусторонней связи для уведомления соседнего транспортного средства, когда уровень опасности превышает порог потенциальной опасности. 6. Система сигнализации по п. 5, отличающаяся тем, что автоматический операционный модуль двусторонней связи электрически соединен с модулем сигнализации направления опасности, при этом модуль сигнализации направления опасности выполнен с возможностью выработки сигнала тревоги соответствующего направления, когда уровень опасности превышает порог потенциальной опасности. 7. Система сигнализации по п. 1, отличающаяся тем, что также включает в себя устройство обнаружения соседнего транспортного средства, причем устройство обнаружения соседнего транспортного средства электрически соединено с процессором и предназначено для определения положения соседнего транспортного средства относительно данного и для передачи сигнала обнаружения, содержащего параметр относительного положения соседнего транспортного средства, в процессор для выработки уровня опасности на базе параметра относительного положения соседнего транспортного средства. 8. Система сигнализации по п. 7, отличающаяся тем, что параметр относительного положения соседнего транспортного средства включает в себя по меньшей мере один параметр, выбранный из группы, включающей расстояние до соседнего транспортного средства, угол относительно соседнего транспортного средства, скорость соседнего транспортного средства и ускорение соседнего транспортного средства. 9. Система сигнализации по п. 7, отличающаяся тем, что устройство обнаружения соседнего транспортного средства выбрано из группы, включающей в себя радарный детектор, лазерный детектор или детектор изображения. 2 102912014.08.30 10. Система сигнализации по п. 1, отличающаяся тем, что процессор выполнен с возможностью определения уровня опасности в продольном направлении и уровня опасности в поперечном направлении. 11. Система сигнализации по п. 1, отличающаяся тем, что модуль сигнализации направления опасности включает в себя блок управления и устройство тревожной сигнализации, причем устройство тревожной сигнализации электрически соединено с блоком управления, а блок управления предназначен для управления устройством тревожной сигнализации, предназначенным для выработки соответствующего знака направления сигнала тревоги согласно уровню опасности. 12. Система сигнализации по п. 11, отличающаяся тем, что модуль сигнализации направления опасности также включает в себя по меньшей мере один блок векторизации,причем блок векторизации электрически соединен с блоком управления и предназначен для векторизации уровня опасности в вектор уровня опасности, чтобы квантифицировать знак направления опасности. 13. Система сигнализации по п. 2, отличающаяся тем, что также включает в себя устройство определения состояния водителя, которое электрически соединено с процессором и предназначено для определения состояния водителя и выработки сигнала, который содержит информацию о состоянии водителя, процессор выполнен также с возможностью выработки уровня опасности на базе информации о состоянии водителя. 14. Система сигнализации по п. 2, отличающаяся тем, что также включает в себя устройство определения движения транспортного средства, которое электрически соединено с процессором и предназначено для определения состояния движения транспортного средства и выработки сигнала, который содержит информацию о динамике транспортного средства, при этом процессор выполнен также с возможностью выработки уровня опасности на базе информации о динамике транспортного средства. 15. Система сигнализации по п. 1, отличающаяся тем, что сигнал тревоги выбран из группы, состоящей из картинки, звука, света, вибрации, воздушной струи или любого их сочетания. 16. Система сигнализации по п. 1, отличающаяся тем, что направление сигнала тревоги включает в себя восемь направлений - спереди, сзади, слева, справа, спереди справа,спереди слева, сзади справа и сзади слева. 17. Система сигнализации по п. 1, отличающаяся тем, что для оценки направления сигнала тревоги опорной точкой является центр транспортного средства или центр положения водителя. Настоящая полезная модель относится к всенаправленной системе тревожной сигнализации транспортного средства, то есть к той системе тревожной сигнализации, которая информирует водителей об опасности сигналом тревоги, исходящим из определенного направления. Еще недавно передовые системы предотвращения столкновения автомобилей активно разрабатывались в различных странах с целью повышения безопасности дорожного движения. В настоящее время системы, широко используемые для этих целей, в основном подразделяются на технические средства передачи информации об обнаружении опасности в ближнем радиусе и на технические средства передачи информации о состоянии дороги в широком диапазоне, причем разрабатываемые системы передачи информации в ближнем радиусе предусматривают использование радиолокационных станций для предупреждения столкновений, лазерных установок и камер, так как такие системы в основном необходимы на закрытых участках обзора и помогают водителю сразу же принять необходимые меры для того, чтобы избежать ДТП. Системы передачи информации о состоянии дороги в широком диапазоне изначально основывались на текстовых/графических 3 102912014.08.30 телекоммуникационных системах, информирующих водителя о состоянии дорожного окружения и полос движения на достаточно большом расстоянии, но такие системы не способны передавать информацию мгновенно и детально, поэтому такие системы не подходят для мгновенной передачи данных о состоянии дороги в ближнем радиусе. По этой причине во многих странах для этих целей развивается беспроводная сеть ближнего радиуса действия, технология . В октябре 2004 года правительством США были внесены изменения в стандарт, который теперь позволяет производителям и сервисному обслуживанию транспортных средств использовать иные системы получения информации на дорогах в ближнем радиусе. С этих пор вышеупомянутые системы стали объединять с устройствами спутниковой навигации и сигналы транспортного средства используют для развития интеллектуальной транспортной системыдля того, чтобы обеспечить полностью автоматическое регулирование дорожного движения, а также значительно повысить уровень безопасности и комфорта на дорогах, т.е. обеспечить условия для безаварийной езды. В современных системах двусторонней связи между транспортными средствами используется устройство обмена сигналами между данным транспортным средством и транспортным средством, находящимся в непосредственной близости от данного, для обеспечения безопасности между ними, а также для передачи информации о состоянии на дорогах в целях информирования водителя о необходимости преждевременной готовности. Например,используется для передачи тормозного сигнала вследствие экстренного торможения сзади идущим транспортным средствам, а также для определения безопасного расстояния между данным транспортным средством и окружающими его транспортными средствами и передачи сигнала тревоги при возникновении возможности столкновения. Кроме того, известные устройства двусторонней связи предусматривают наличие экрана в салоне транспортного средства с целью показывать водителю расстояние между транспортными средствами и сигналы тревоги, чтобы обеспечить водителя необходимой информацией и напоминать ему о возможной опасности. Для того чтобы в экстренной ситуации водитель не отвлекся от экрана во время управления транспортным средством,все больше распространяется использование сигнализации со встроенными вибрационными элементами на обеих сторонах рулевого колеса. Эти элементы информируют водителя о приближающихся транспортных средствах слева и справа. Хотя известные системы способны напоминать водителю об опасной ситуации на дорогах с помощью комбинации устройства двусторонней связи и устройства тревожной сигнализации и при этом информация устройства тревожной сигнализации отражается на экране, водители во время езды отвлекают свое внимание от экрана, что легко может привести к опасной ситуации или аварии. Кроме того, встроенные вибрационные элементы по обеим сторонам рулевого колеса могут служить для информирования водителя о приближающихся транспортных средствах слева и справа, но не могут обеспечить всенаправленную тревожную сигнализацию об опасности. Подводя итог сказанному выше, можно сделать вывод, что известные системы тревожной сигнализации обычно предусматривают устройство двусторонней связи между транспортными средствами и устройство тревожной сигнализации с целью информирования водителя о возможной опасности, а также экран, на который сигнальное устройство тревожной сигнализации передает эту информацию, хотя в процессе вождения не исключено, что водитель может отвлечь свое внимание от экрана, что может привести к аварии. Впоследствии эти системы стали предусматривать использование вибрационных элементов, встроенных по обеим сторонам рулевого колеса, с целью любым способом передать водителю информацию о возможной опасности. Но на практике такие системы используются редко. Таким образом, основной задачей данной полезной модели является разработка всенаправленной системы тревожной сигнализации транспортного средства, способной определить уровень опасности, исходя из расстояния между транспортными средствами. Еще 4 102912014.08.30 одной задачей данной полезной модели является разработка всенаправленной системы тревожной сигнализации транспортного средства, способной определить уровень опасности исходя из состояния водителя и условий движения самого транспортного средства. Поставленные выше задачи решаются тем, что согласно данной полезной модели всенаправленная система тревожной сигнализации транспортного средства включает в себя процессор, модуль сигнализации опасности, информирующий об опасности, и модуль сигнализации направления опасности, информирующий о направлении, откуда грозит непосредственная опасность. Процессор предназначен для приема и обработки по меньшей мере одного сигнала обнаружения, выработки уровня опасности на базе сигнала обнаружения и сигнала тревоги, когда уровень опасности превышает порог непосредственной опасности. Модуль сигнализации опасности электрически соединен с процессором и предназначен для приема сигнала тревоги и передачи сигнала запуска. Модуль сигнализации направления опасности электрически соединен с модулем сигнализации опасности и предназначен для выработки знака направления тревоги на базе сигнала запуска. В преимущественном воплощении заявляемая система сигнализации включает также автомобильное устройство двусторонней связи и спутниковое устройство преобразования координат. Автомобильное устройство двусторонней связи предназначено для передачи сигнала обнаружения, который включает в себя сигнал двусторонней связи между данным транспортным средством и соседним транспортным средством, находящимся в непосредственной близости от него. Спутниковое устройство преобразования координат электрически связано с упомянутым автомобильным устройством двусторонней связи и процессором и предназначено для выработки значения координат соседнего транспортного средства на базе сигнала двусторонней связи и передачи в процессор сигнала обнаружения, несущего значение координат соседнего транспортного средства, причем процессор выполнен также с возможностью выработки уровня опасности на базе значения координат соседнего транспортного средства. В предпочтительном варианте воплощения заявляемой системы сигнализации модуль сигнализации опасности электрически соединен с автомобильным устройством двусторонней связи, предназначенным для передачи сигнала обнаружения, при этом модуль сигнализации опасности выполнен также с возможностью выработки сигнала двусторонней связи для предупреждения соседнего транспортного средства, когда уровень опасности превышает порог непосредственной опасности. Предпочтительными являются следующие сигналы двусторонней связи сигнал выделенной связи малой дальности , сигнал беспроводной связи высокоскоростной передачи данных , сигнал беспроводного Интернета (-), сигнал мобильной связи третьего поколения (3) и сигнал универсальной беспроводной связи на большие расстояния . В предпочтительном варианте воплощения заявляемая система сигнализации включает также автоматический операционный модуль двусторонней связи, электрически подключенный между процессором и автомобильным устройством двусторонней связи, при этом автомобильное устройство двусторонней связи выполнено с возможностью передачи сигнала двусторонней связи для уведомления соседнего транспортного средства, когда уровень опасности превышает порог потенциальной опасности. В предпочтительном варианте воплощения заявляемой системы сигнализации автоматический операционный модуль двусторонней связи электрически соединен с модулем сигнализации направления опасности, информирующим о направлении опасности. При этом модуль сигнализации направления опасности выполнен с возможностью выработки сигнала тревоги соответствующего направления, когда уровень опасности превышает порог потенциальной опасности. В предпочтительном варианте заявляемая система сигнализации также включает устройство обнаружения соседнего транспортного средства, электрически соединенное с процессором и предназначенное для определения расположения соседнего транспортного 5 102912014.08.30 средства относительно данного и для передачи сигнала обнаружения, включающего параметр относительного положения соседнего транспортного средства, в процессор для выработки на базе этой информации уровня опасности. Предпочтительно, чтобы параметр относительного положения соседнего транспортного средства включал по меньшей мере один параметр, выбранный из группы, включающей расстояние до соседнего транспортного средства, угол относительно соседнего транспортного средства, скорость и ускорение соседнего транспортного средства. Предпочтительно, чтобы устройство обнаружения соседнего транспортного средства было выбрано из группы, включающей радарный, лазерный детектор или детектор изображения. В предпочтительном варианте заявляемой системы сигнализации процессор выполнен с возможностью определения уровня опасности в продольном направлении и уровня опасности в поперечном направлении, т.е. уровень опасности подразделяется на уровень опасности,исходящий с боковых направлений, и уровень опасности, исходящий спереди и сзади транспортного средства. В предпочтительном варианте заявляемой системы сигнализации модуль сигнализации направления опасности включает электрически соединенные блок управления и устройство тревожной сигнализации, при этом блок управления предназначен для управления устройством тревожной сигнализации для выработки знака направления тревоги в соответствии с уровнем опасности. В предпочтительном варианте модуль сигнализации направления опасности включает минимум один блок векторизации, электрически соединенный с блоком управления и предназначенный для преобразования уровня опасности в вектор уровня опасности для того, чтобы квантифицировать знак направления сигнала тревоги. В предпочтительном варианте заявляемая система сигнализации также включает устройство определения состояния водителя, электрически соединенное с процессором и предназначенное для выработки сигнала, который содержит информацию о состоянии водителя, при этом процессор выполнен так, что сигнал обнаружения, вырабатываемый процессором, содержит в себе информацию о состоянии водителя. На базе этой информации процессор определяет уровень опасности. В предпочтительном варианте заявляемая система сигнализации также включает устройство определения движения транспортного средства, электрически соединенное с процессором и вырабатывающее сигнал, содержащий информацию о динамике транспортного средства, при этом процессор выполнен с возможнотью определения уровня опасности на базе упомянутой информации о динамике транспортного средства. Предпочтительно,когда в заявляемой системе сигнализации вышеупомянутый сигнал тревоги отображается на экране в виде условного образа, выбранного из группы, содержащей картинку, звук,свет, вибрации, воздушную струю или любое их сочетание. Предпочтительно, когда в заявляемой системе сигнализации направление сигнала тревоги включает восемь направлений вперед, назад, вправо, влево, вправо вперед, влево вперед, вправо назад, влево назад. Предпочтительно, когда в заявляемой системе сигнализации опорной точкой для оценки направления сигнала тревоги является центр транспортного средства или центр положения водителя. Вышеуказанный уровень опасности подразделяется на уровень опасности, исходящий с боковых направлений, и уровень опасности, исходящий спереди и сзади транспортного средства. По сравнению с традиционными автомобильными устройствами двусторонней связи и тревожной сигнализацией всенаправленная система тревожной сигнализации транспортного средства согласно данной полезной модели характеризуется тем, что процессор определяет опасную ситуацию, в которой могут оказаться данное и соседнее транспортные средства, модуль сигнализации опасности воспроизводит сигнал тревоги, указывающий водителю на конкретное направление возникшей опасности, чтобы проинформировать его о ситуации, требующей его особого внимания. 6 102912014.08.30 Кроме того, всенаправленная система тревожной сигнализации транспортного средства согласно данной полезной модели обрабатывает сигнал обнаружения, затем процессор определяет, попадает ли состояние водителя в пределы непосредственной опасности, при этом модуль сигнализации опасности воспроизводит сигнал тревоги, исходящий из соответствующего направления и указывающий водителю направление, откуда грозит непосредственная опасность. Пример конкретного воплощения всенаправленной системы тревожной сигнализации в соответствии с преимущественным вариантом осуществления данной полезной модели представлен на нижеописанных фигурах. На фиг. 1 представлена блок-схема заявляемой всенаправленной системы тревожной сигнализации в соответствии с данной с полезной моделью фиг. 2 иллюстрирует уровень опасности, исходящей с боковых направлений, которую определил процессор в соответствии с параметрами источника опасности фиг. 3 иллюстрирует уровень опасности, исходящей спереди и сзади, которую определил процессор в соответствии с параметрами источника опасности на фиг. 4 представлено схематическое изображение на плоскости сигналов тревоги,поступающих из различных направлений на фиг. 5 представлено схематическое изображение определения направления опасности всенаправленной системой тревожной сигнализации согласно заявляемой полезной модели на фиг. 6 дана проекция устройства тревожной сигнализации, в котором сигнал тревоги исходит из определенного направления на фиг. 7 дана проекция устройства тревожной сигнализации, в котором сигнал тревоги выражается в световом эффекте на фиг. 8 дана проекция устройства тревожной сигнализации, в котором сигнал тревоги выражается вибрацией, и на фиг. 9 дана проекция устройства тревожной сигнализации, в котором сигнал тревоги является звуковым. Технические характеристики всенаправленной системы тревожной сигнализации согласно данной полезной модели следуют из нижеприведенного подробного описания преимущественного варианта его осуществления на базе описанных выше фигур. На фиг. 1 представлена блок-схема заявляемой всенаправленной системы тревожной сигнализации всоответствии с данной с полезной моделью. Всенаправленная система тревожной сигнализации 100 транспортного средства содержит автомобильное устройство 1 двусторонней связи, спутниковое устройство 2 преобразования координат, процессор 3, устройство 4 обнаружения соседнего транспортного средства, устройство 5 определения состояния водителя, устройство 6 определения движения транспортного средства, модуль 7 сигнализации опасности, информирующий об опасности, автоматический операционный модуль 8 двусторонней 10 связи и модуль 9 сигнализации направления опасности. Всенаправленная система 100 тревожной сигнализации транспортного средства разработана для постоянного приема как минимум одного сигнала обнаружения. Автомобильное устройство 1 двусторонней связи осуществляет обмен сигналами между данным и соседним транспортным средством, и этим сигналом может быть сигнал,выбранный из группы, включающей сигнал выделенной связи малой дальности ,сигнал беспроводной связи высокоскоростной передачи данных , сигнал беспроводного Интернета (-), сигнал мобильной связи третьего поколения (3) и сигнал универсальной беспроводной связи на большие расстояния . Спутниковое устройство 2 преобразования координат электрически соединено с автомобильным устройством 1 двусторонней связи. Когда автомобильное устройство 1 двусторонней связи получает сигнал, этот сигнал вместе с информацией, полученной на , определяет значение ко 7 102912014.08.30 ординат соседнего транспортного средства, и сигнал обнаружения, содержащий в себе эти координаты, передается на процессор 3. Процессор 3 состоит из блока 31 приема данных,блока 32 обработки данных и блока 33 принятия решений. Блок 31 приема данных электрически соединен со спутниковым устройством 2 преобразования координат, его назначение - прием сигнала обнаружения. Блок 32 обработки данных электрически соединен с блоком 31 приема данных, его назначение - обработка данных, полученных блоком 31 приема данных, для определения уровня опасности. Блок 33 принятия решений электрически соединен с блоком 32 обработки данных, его назначение - определить, существует ли опасность между данным и соседним транспортными средствами, исходя из уровня опасности. Уровень опасности подразделяется на уровень опасности, исходящей с боковых направлений, и уровень опасности, исходящей спереди и сзади транспортного средства,а также на три степени безопасное расстояние, потенциальная опасность и непосредственная опасность. Фиг. 2 иллюстрирует уровень опасности, исходящей с боковых направлений, которую определил процессор в соответствии с параметрами источника опасности согласно преимущественному варианту осуществления данной полезной модели. Уровень опасности, исходящей с боковых направлений, можно подразделить на следующие три подуровня, исходя из двух значений фактического поперечного расстоянияи критического поперечного тревожного расстояния(следует отличатьот продольного критического тревожного расстояния) 1)без учета вектора скорости сближения - это безопасное расстояние 2),с учетом вектора скорости сближения определяется как порог потенциальной опасности 3),с учетом вектора скорости сближения определяется как порог непосредственной опасности. Значениепреимущественного варианта осуществления данной полезной модели вычисляют по нижеприведенной формуле,2 где- ширина дороги- ширина транспортного средства. На фиг. 2 буквойобозначено данное транспортное средство, взаимодействие между данным и соседними транспортными средствами обозначено как 1, 2, 3, 4, 5 и представлено в нижеприведенной таблице. Соседние транспортные средства 1 2 3 4 5 Определение уровня Вектор опасности, исходящей скорости Уровень опасности с боковых направлений сближениянет безопасное расстояниеда порог потенциальной опасностинет порог потенциальной опасностида порог непосредственной опасностида или нет порог непосредственной опасности Фиг. 3 иллюстрирует уровень опасности, исходящей спереди и сзади транспортного средства, определенный процессором в соответствии с параметрами источника опасности. Уровень опасности, исходящей спереди и сзади транспортного средства, вычислен с помощью следующих значений фактического расстояниядо впереди или сзади идущего транспортного средства, критического продольного тревожного расстояния , критического расстояния торможенияи длины транспортного средства . Уровень опасности, исходящей спереди и сзади транспортного средства, можно классифицировать на следующие три подуровня1) безопасное расстояние /1 2) порог потенциальной опасности /1 3) порог непосредственной опасности. 8 102912014.08.30 Поскольку фактическое расстояние до впереди или сзади идущего транспортного средства , критическое продольное тревожное расстояние , критическое расстояние торможенияи длина транспортного средства- это вполне определенные физические величины, нет смысла описывать их подробно. В нижеприведенной таблице и на фиг. 3 данное транспортное средство обозначено буквой . После того как у него определяется уровень опасности, исходящей спереди или сзади, указанный в нижеприведенной таблице, уровень опасности соседнего транспортного средства 6, как указано на фиг. 3 , превышает порог потенциальной опасности, уровень опасности соседнего транспортного средства 7, как указано на фиг. 3 ,превышает порог безопасного расстояния, и уровень опасности соседнего транспортного средства 8, как указано на фиг. 3 , превышает порог непосредственной опасности. Соседнее транспортное средство Уровень опасности порог потенциальной опасности безопасное расстояние порог непосредственной опасности На фиг. 1-3 устройство 4 обнаружения соседнего транспортного средства электрически соединено с блоком 31 приема данных для обнаружения относительного местоположения транспортного средстваи соседних транспортных средств 18 с целью определить параметры расположения соседнего транспортного средства и передать на процессор 3 сигнал обнаружения, содержащий в себе эту информацию. Блок 32 обработки данных производит обработку информации, исходя из параметров относительного расположения соседнего транспортного средства. При этом устройство 4 обнаружения соседнего транспортного средства, выбранное из группы, включающей радарный детектор,лазерный детектор или детектор изображения, является устройством обнаружения в ближнем радиусе и используется для того, чтобы обнаружить соседние транспортные средства 18 вблизи транспортного средства , а параметр относительного положения соседнего транспортного средства - это динамическая величина, которая включает расстояние до соседнего транспортного средства, угол, скорость и ускорение (разгон) соседнего транспортного средства, используемые в качестве исходных величин для вычисления процессором 3 уровня опасности. Фактически процессору 3 необходимо получить как минимум один сигнал обнаружения, содержащий координаты соседнего транспортного средства, и сигнал обнаружения,содержащий параметры относительного расположения соседнего транспортного средства,для того, чтобы он смог определить расположение данного транспортного средства и других транспортных средств относительно друг друга. Устройство 5 определения состояния водителя электрически соединено с блоком 31 приема данных с целью контроля состояния водителя и передачи в процессор 3 сигнала,содержащего информацию о состоянии водителя. Блок 32 обработки данных производит обработку информации о состоянии водителя, чтобы при вычислении получить более точный уровень опасности. На практике информация о состоянии водителя включает физическое состояние водителя (задремал ли водитель или уснул) или пределы обзора водителя (отклонен ли ракурс вправо или влево при закрытом участке обзора, когда опасность увеличивается). Устройство 6 определения движения транспортного средства электрически соединено с блоком 31 приема данных с целью контроля перемещения и передачи на процессор 3 102912014.08.30 сигнала, содержащего в себе эту информацию. Процессор выполняет обработку полученной информации, чтобы определить более точный уровень опасности, и блок 32 обработки данных определяет уровень опасности. На практике такой сигнал содержит информацию о скорости, ускорении (разгоне) и направлении транспортного средства. В вышеизложенном описании преимущественного варианта осуществления полезной модели для определения уровня опасности блок 32 обработки данных использует координаты соседнего транспортного средства в качестве исходной точки и другие данные,включающие параметры относительного положения соседнего транспортного средства,сигналы контроля состояния водителя и движения транспортного средства. Однако в других преимущественных вариантах осуществления полезной модели блок 32 обработки данных использует только автомобильное устройство 1 двусторонней связи и спутниковое устройство 2 преобразования координат для постоянного получения информации о координатах соседнего транспортного средства и ее последующей обработки. Модуль 7сигнализации опасности электрически соединен с блоком 33 принятия решения и автомобильным устройством 1 двусторонней связи, и, когда уровень опасности превышает порог непосредственной опасности, автомобильное устройство 1 двусторонней связи срабатывает и передает сигнал, чтобы предупредить соседние транспортные средства. Автоматический операционный модуль 8 двусторонней связи электрически соединен с блоком 33 принятия решения и автомобильным устройством 1 двусторонней связи, так что, когда уровень опасности превышает порог потенциальной опасности, процессор 3 приводит в действие устройство 1 двусторонней связи через автоматический операционный модуль 8 двусторонней связи, чтобы предупредить соседние транспортные средства. Иными словами, если блок 33 принятия решения, входящий в процессор 3 всенаправленной системы 100 тревожной сигнализации, определяет, что уровень опасности превышает порог непосредственной опасности, модуль 7 сигнализации опасности приводит в действие автомобильное устройство 1 двусторонней связи, которое передает сигнал для предупреждения соседних транспортных средств. Если блок 33 принятия решений процессора 3 определяет, что уровень опасности превышает порог потенциальной опасности,водитель избирательно задействует автоматический операционный модуль 8 двусторонней связи, чтобы предупредить соседние транспортные средства, что уровень опасности ниже. Модуль 9 сигнализации направления опасности включает два блока 91, 91 векторизации, блок 92 управления и устройство 93 тревожной сигнализации. Блок 91 векторизации электрически соединен с модулем 7 сигнализации опасности, информирующим об опасности, и блоком 92 управления, а блок 91 векторизации электрически соединен с автоматическим операционным модулем 8 двусторонней связи и блоком 92 управления,блок 92 управления, в свою очередь, электрически соединен с устройством 93 тревожной сигнализации. Блок 91 векторизации служит для преобразования уровня опасности в вектор, когда уровень опасности превышает порог непосредственной опасности блок 91 векторизации служит для преобразования уровня опасности в вектор, когда уровень опасности превышает порог потенциальной опасности. Блок 92 управления приводит в действие устройство 93 тревожной сигнализации для воспроизведения соответствующего сигнала тревоги и контролирует этот сигнал в соответствии с вектором уровня опасности. При этом устройство 93 тревожной сигнализации может быть экраном, автомагнитолой,светоизлучающим или вибрационным элементом или кондиционером, а сигнал тревоги может отображаться в виде изображения на экране, звука, света, вибрации, воздушной струи или любого их сочетания. На фиг. 4-6 в соответствии с преимущественным вариантом воплощения данной полезной модели представлено соответственно схематическое изображение на плоскости сигналов тревоги, поступающих из различных направлений, схематическое изображение определения направления опасности и проекция устройства тревожной сигнализации, в котором сигнал тревоги исходит из определенного направления. Как показано на фиг. 4, 10 102912014.08.30 устройство 93 тревожной сигнализации отображает на экране транспортное средство 200 и восемь сигналов 931, 931, 931, 931, 931, 931, 931, 931 тревоги, которые представляют восемь направлений. Когда спереди слева, сзади слева и справа от транспортного средства 200 возникает опасность, устройство 93 тревожной сигнализации выводит на экран сигналы 931, 931, 931 тревоги, чтобы напомнить водителю о том, что ему следует обратить особое внимание на эти направления. На фиг. 4 кружки, изображенные сплошной линией, обозначают сигналы тревоги 931, 931, 931, а кружки, изображенные пунктиром, - сигналы 931, 931, 931, 931, 931 направления. При фактическом применении для указания различных уровней опасности устройство 93 тревожной сигнализации может использовать различные цвета или различную частоту мигания. Например,зеленый, желтый и красный цвета используются для отображения уровней опасности при безопасном расстоянии, при пороге потенциальной опасности и пороге непосредственной опасности соответственно. Кроме того, устройство 93 тревожной сигнализации может указывать расстояния. На фиг. 5 изображены данное 200 и соседнее 300 транспортные средства. Данное транспортное средство 200 изображено в центре, по изображению можно вычислить внутренний уголмежду соседним транспортным средством 300 и абсциссойдля определения положения соседнего транспортного средства 300. Как уже было описано выше, когда соседнее 300 и данное 200 транспортные средства находятся слишком близко друг от друга,а уровень опасности превышает порог потенциальной или непосредственной опасности,устройство 93 тревожной сигнализации отображает положение соседнего транспортного средства 300 сигналом тревоги 931 соответствующего направления. В данном воплощении полезной модели транспортное средство 200 используется в качестве центра для определения восьми направлений спереди, сзади, слева, справа, справа спереди, справа сзади, слева спереди и слева сзади. Положение, отображаемое устройством 93 тревожной сигнализации, может появиться на экране устройства 1, на экране устройства 2 или на приборной панели устройства 3. На фиг. 7 для преимущественного варианта воплощения данной полезной модели дана проекция устройства тревожной сигнализации, когда сигнал тревоги, вырабатывемый устройством тревожной сигнализации, воспроизводится как световой сигнал тревоги соответствующего направления. Устройство 93 тревожной сигнализации обеспечивает этот световой сигнал и включает светодиоды, установленные в восьми различных положениях на транспортном средстве. На этой фигуре пунктирная линия изображает различные направления сигнала тревоги. Например, при возникновении опасности впереди транспортного средства, светодиод, установленный на приборной панели, загорается и предупреждает водителя. Кроме того, в преимущественном варианте воплощения данной полезной модели устройство 93 тревожной сигнализации может быть установлено в любом другом месте, если это более удобно для водителя. На фиг. 8 для преимущественного варианта воплощения данной полезной модели дана проекция устройства тревожной сигнализации, когда сигнал тревоги, вырабатывемый устройством тревожной сигнализации, является вибрационным сигналом соответствующего направления. Устройство тревожной сигнализации 93 содержит множество вибрационных элементов 931, 932, 933, 934, 935, 936. Вибрационные элементы устанавливаются отдельно в различных местах транспортного средства так, что центр водителя является исходной точкой, и эти элементы срабатывают для воспроизведения соответствующего сигнала тревоги, исходя из направления и уровня возникшей опасности, при этом, чем выше уровень опасности, тем выше частота вибрации. В данном случае вибрационные элементы 931,932 установлены по обеим сторонам рулевого колеса, вибрационные элементы 933, 934 по обеим сторонам сиденья водителя, а вибрационные элементы 935, 936 - по обеим сторонам спинки сиденья водителя. В данном варианте воплощения полезной модели 102912014.08.30 уровни опасности представлены одновременной вибрацией вибрационных элементов 931, 932 при возникновении опасности спереди, вибрацией отдельно вибрационных элементов 931, 932 при возникновении опасности спереди слева или спереди справа,вибрационных элементов 933, 934 при возникновении опасности слева и справа, вибрационных элементов 935, 936 при возникновении опасности сзади, сзади слева и сзади справа, подобно вибрационным элементам 931, 932. На фиг. 9 для лучшего варианта воплощения данной полезной модели дана проекция устройства тревожной сигнализации, которое воспроизводит звуковой сигнал тревоги соответствующего направления. Устройство 93 тревожной сигнализации содержит множество динамиков 931, 932, 933, 934, 935, 936, установленных в разных местах и направлениях транспортного средства, причем направления представлены вибрацией вибрационных элементов подобно тому, как описано выше, и поэтому здесь не дано подробно. Необходимо отметить, что, когда в качестве сигналов тревоги используются звуковые сигналы, их роль выполняют низкочастотные динамики и динамики высокого, среднего и низкого диапазона, установленные в дверные наличники передней, задней, левой и правой дверей, динамики, установленные в левую и правую колонны, динамики, установленные в левую и правую приборные панели, в левое и правое треугольное декоративное покрытие,на левой и правой стенке, на левой и правой задних стенах и на потолке. Динамики вместе с устройством 93 тревожной сигнализации, информирующей об опасности, и блоком векторизации 91 и 91 приводят в действие блок 92 управления (или контроллер звукового поля) для регулировки положения звука, звукового поля и технологии задержки фазы (для пространственного эффекта приближения звука) сигнала тревоги соответствующего направления, чтобы создать эффект объемного звучания. Таким образом, водитель может узнать о тревожной ситуации, не глядя на экран, заранее подготовиться и вовремя среагировать на нее. В другом варианте воплощения полезной модели сигнал тревоги может выражаться потоком воздуха. Устройство 93 тревожной сигнализации представляет собой устройство воздушного кондиционирования со множеством вентиляционных отверстий. Вентиляционное отверстие на приборной панели слева от рулевого колеса представляет левое направление, такое же отверстие справа от рулевого колеса представляет правое направление,вентиляционное отверстие на спинке сиденья представляет направление сзади, а на сиденье - направление спереди. Направления спереди справа, спереди слева, сзади слева и сзади справа могут быть представлены комбинацией вышеперечисленных отверстий. Таким образом, исходя из уровня опасности и направления возникновения опасности, сигналом тревоги может служить поток воздуха из соответствующего вентиляционного отверстия на водителя. Причем уровень опасности измеряется интенсивностью воздушного потока. Настоящая полезная модель еще отличается тем, что сигнал обнаружения, содержащий информацию о соседнем транспортном средстве, о данном транспортном средстве или о перемещении данного транспортного средства, приходит постоянно и преобразовывается в уровень опасности. Когда уровень опасности превышает порог непосредственной опасности, раздается сигнал тревоги соответствующего направления, чтобы проинформировать водителя о направлении и ситуации, требующих его особого внимания и обеспечения безопасности движения. Соответственно, если уровень опасности превышает порог непосредственной опасности или потенциальной опасности, водители соседних транспортных средств активно предупреждаются об этом. Что касается вышеописанных постоянно получаемых сигналов обнаружения, эти сигналы, содержащие информацию о соседнем транспортном средстве, о данном транспортном средстве или о состоянии водителя данного транспортного средства, могут приходить отдельно, также может поступать любая комбинация из этих сигналов, где для тревожного сигнала определенного направления исходной точкой является данное транспортное средство или водитель данного транспортного средства. Вкратце, если сигнал обнаружения 102912014.08.30 содержит информацию о соседнем или данном транспортном средстве, для устройства тревожной сигнализации транспортное средство выступает в качестве исходной точки для воспроизведения сигнала тревоги соответствующего направления (например, положение и направление соседних транспортных средств вокруг данного транспортного средства представляет положение и направление соседнего транспортного средства). Если сигналом обнаружения является сигнал, содержащий информацию о состоянии водителя транспортного средства, для устройства тревожной сигнализации в качестве исходной точки для воспроизведения сигнала тревоги соответствующего направления вокруг водителя выступает сам водитель транспортного средства. Например, если водитель задремал и его голова наклоняется влево, начинает дуть воздух или раздается звук из устройства 93 тревожной сигнализации слева от водителя с целью предостеречь его. Поскольку данная полезная модель описывается в специфических вариантах, специалисты в данной области могут применить многочисленные модификации и вариации, не отклоняясь от масштаба и сущности полезной модели, изложенных в формуле полезной модели. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60W 30/08, G01S 13/06
Метки: тревожной, сигнализации, всенаправленная, средства, система, транспортного
Код ссылки
<a href="https://by.patents.su/14-u10291-vsenapravlennaya-sistema-trevozhnojj-signalizacii-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Всенаправленная система тревожной сигнализации транспортного средства</a>
Дополнительная передняя система световой сигнализации торможения транспортного средства
Номер патента: U 4056
Опубликовано: 30.12.2007
Автор: Валери ВОЛЬФ
МПК: B60Q 1/44
Метки: дополнительная, система, передняя, сигнализации, торможения, средства, транспортного, световой
Текст:
...передняя система световой сигнализации позволяет предупредить и водителя другого транспортного средства, а именно транспортного средства, выполняющего маневр по направлению к транспортному средству, оборудованному дополнительной передней системой световой сигнализации, о торможении транспортного средства. То есть предлагаемая дополнительная система позволяет повысить уровень безопасности участников дорожного движения. Цвет сигнала,...
Устройство световой сигнализации транспортного средства модульное с несменными источниками света
Номер патента: U 7210
Опубликовано: 30.04.2011
Авторы: Балохонов Дмитрий Валентинович, Савчиц Андрей Геннадьевич, Сернов Сергей Павлович, Журавок Александр Александрович, Зуйков Игорь Евгеньевич, Колонтаева Татьяна Владимировна
МПК: B60Q 1/30, F21V 5/00, F21S 8/10...
Метки: средства, несменными, световой, источниками, света, сигнализации, устройство, транспортного, модульное
Текст:
...отражения направляется параллельно оптической оси устройства 23-26. Однако применение металлизированных рефлекторов экономически нецелесообразно, а сложная геометрия коллимирующих линз не обеспечивает необходимую эффективность в силу многократного отражения от фронтальной и тыльной поверхностей. 4 72102011.04.30 Прототипом являются устройства, состоящие из несменного источника света на основе мощного светодиода и драйвера, размещенных...
Система стабилизации кабины транспортного средства
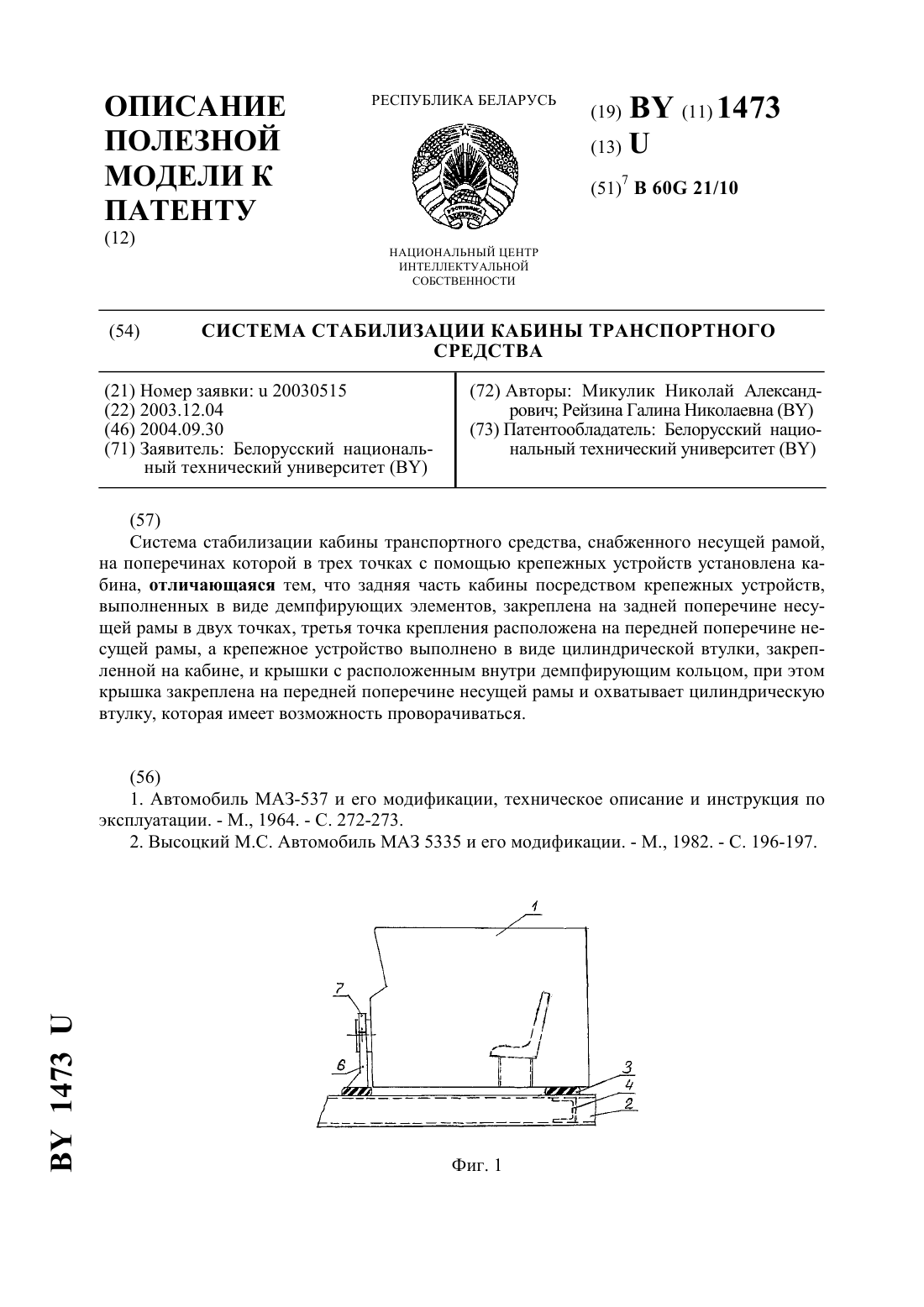
Номер патента: U 1473
Опубликовано: 30.09.2004
Авторы: Рейзина Галина Николаевна, Микулик Николай Александрович
МПК: B60G 21/10
Метки: средства, транспортного, кабины, стабилизации, система
Текст:
...крепления кабины и улучшении комфортабельности работы водителя за счет снижения крутильных деформаций. Поставленная задача решается тем, что в системе стабилизации кабины транспортного средства, снабженного несущей рамой, на поперечинах которой в трех точках с помощью крепежных устройств установлена кабина, задняя часть кабины посредством крепежных устройств, выполненных в виде демпфирующих элементов, закреплена на задней поперечине...
Тормозная система транспортного средства
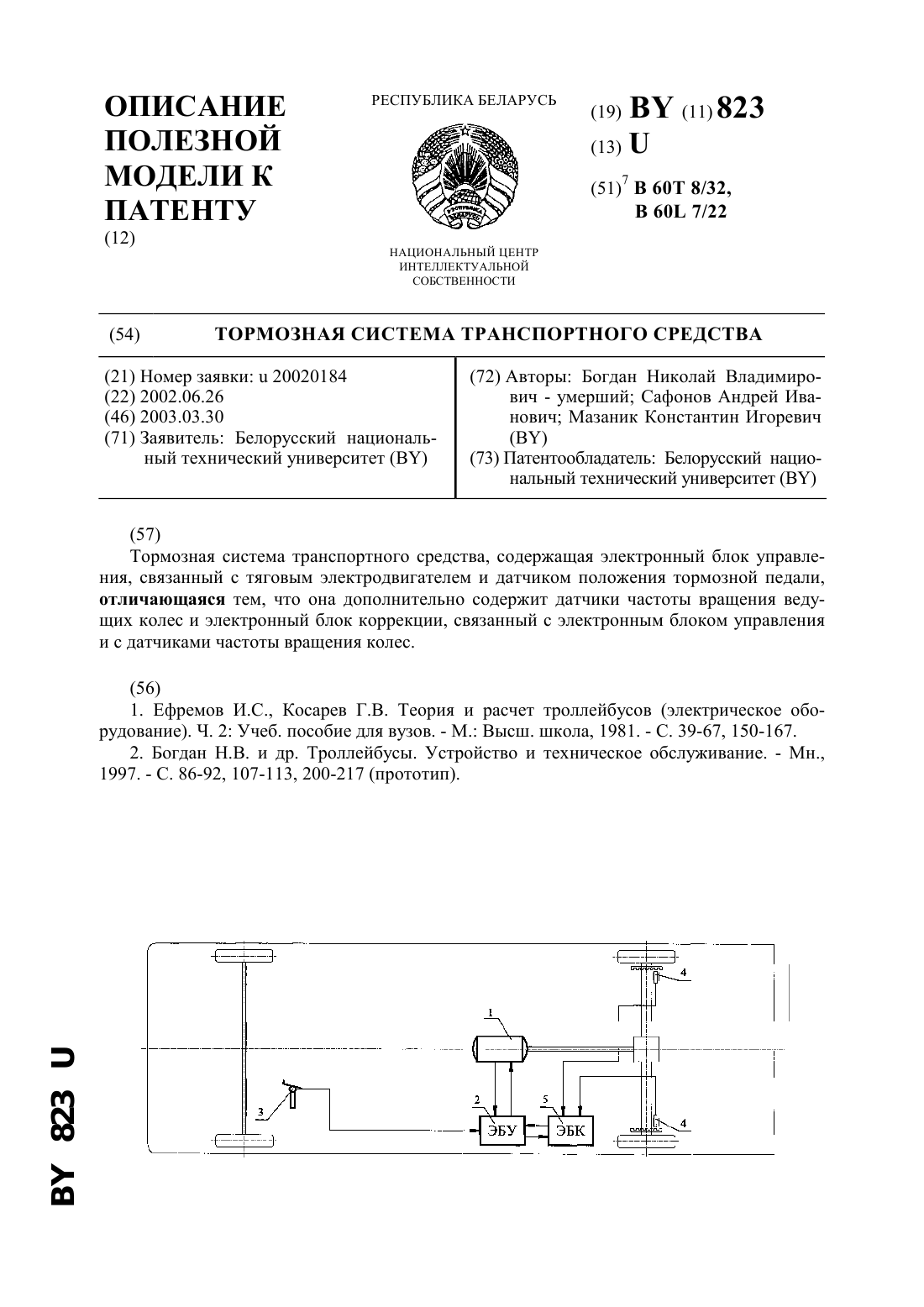
Номер патента: U 823
Опубликовано: 30.03.2003
Авторы: Сафонов Андрей Иванович, Мазаник Константин Игоревич, Богдан Николай Владимирович (умерший)
Метки: транспортного, система, средства, тормозная
Текст:
...и датчиком положения тормозной педали, дополнительно содержит датчики частоты вращения ведущих колес и электронный блок коррекции, связанный с электронным блоком управления и с датчиками частоты вращения колес. На чертеже изображена схема тормозной системы транспортного средства. Система содержит тяговый электродвигатель 1, передающий вращающий момент на колеса ведущего моста. Электронный блок 2 управления связан с тяговым электродвигателем...
Система салонных зеркал заднего обзора транспортного средства
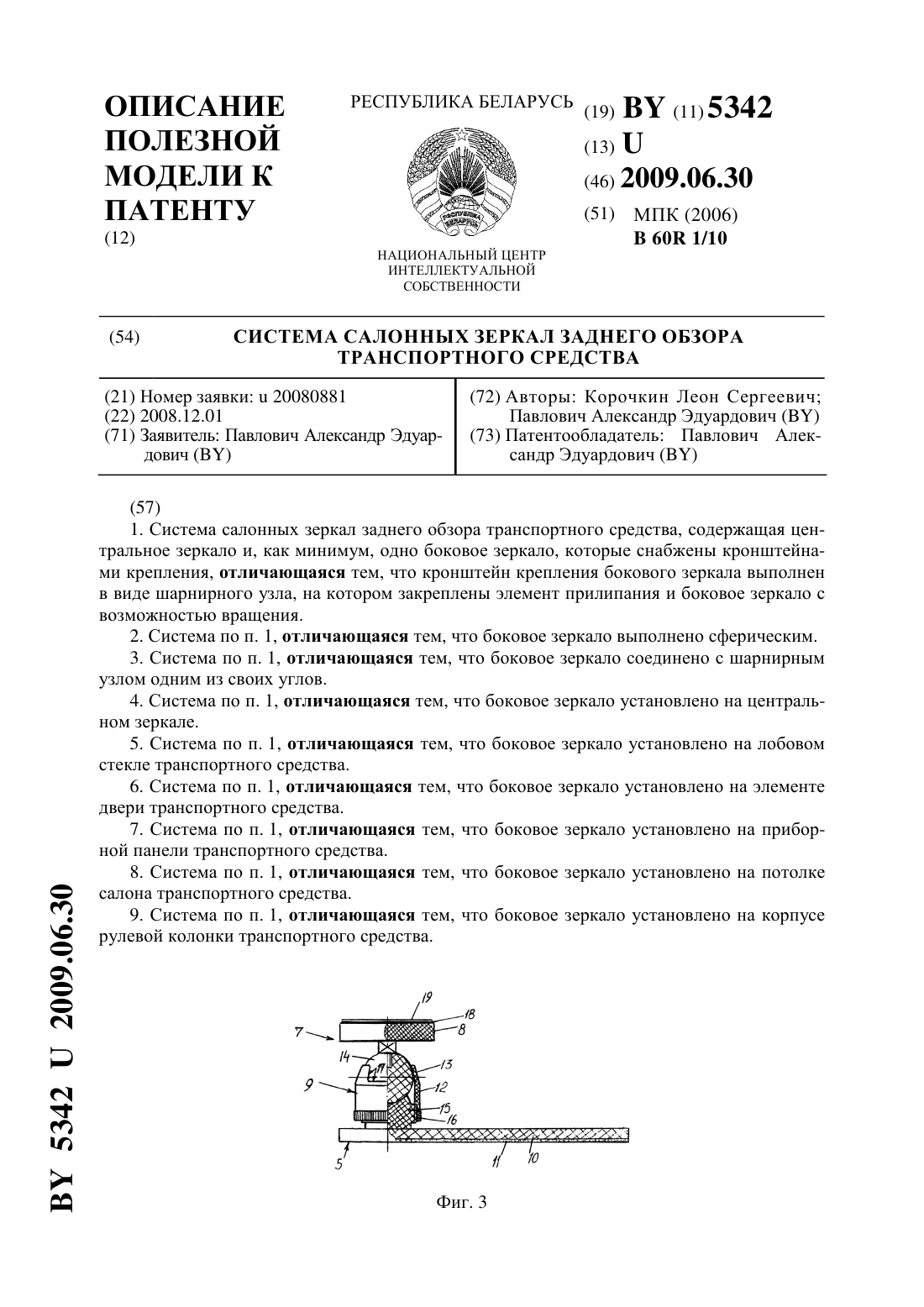
Номер патента: U 5342
Опубликовано: 30.06.2009
Авторы: Корочкин Леон Сергеевич, Павлович Александр Эдуардович
МПК: B60R 1/10
Метки: транспортного, заднего, зеркал, салонных, система, обзора, средства
Текст:
...зеркало установлено в задней части салона транспортного средства, например, на его заднем стекле или заднем сиденье боковое зеркало установлено на перегородке салона транспортного средства элемент прилипания выполнен в виде вакуумной присоски элемент прилипания выполнен в виде гибкой полимерной пластины, покрытой адгезивным слоем шарнирный узел кронштейна крепления бокового зеркала выполнен из полой втулки,охватывающей своим седлом элемент...
Предыдущий патент: Биореактор для промышленного глубинного культивирования микроводорослей
Следующий патент: Автоматическая душевая установка
Случайный патент: Сумматор-накопитель