Высокоэффективный преобразователь мощности для модуляторов и передатчиков
Текст
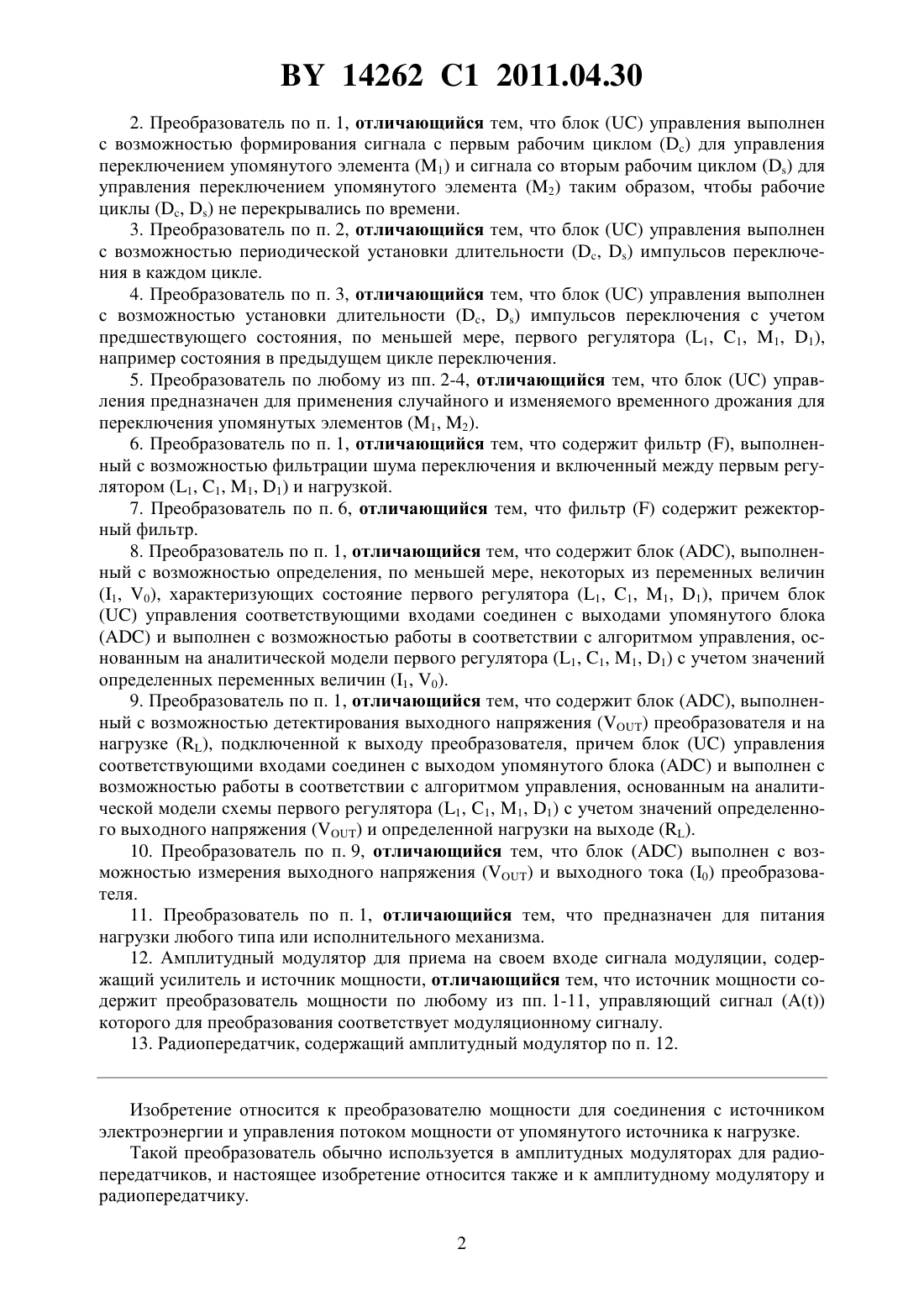
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ВЫСОКОЭФФЕКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ МОЩНОСТИ ДЛЯ МОДУЛЯТОРОВ И ПЕРЕДАТЧИКОВ(71) Заявитель СЕЛЕКС КОММЬЮНИКЕЙШН С.П.А.(73) Патентообладатель СЕЛЕКС КОММЬЮНИКЕЙШН С.П.А.(57) 1. Преобразователь мощности для соединения с источником электроэнергии и управления потоком мощности от упомянутого источника к нагрузке, соответствующим входом соединенный с источником управляющего сигнала для преобразования, содержащий схему сохранения энергии источника, включающую первый регулятор (1, 1, 1,1) широтно-импульсной модуляции для пошагового понижения, входом соединенный с источником положительного напряжения , схему восстановления энергии источника,включающую второй регулятор (2, 2, 2) широтно-импульсной модуляции для пошагового повышения, соответствующими входами соединенный с источником отрицательного напряженияи с выходом упомянутого первого регулятора (1, 1, 1, 1) для обеспечения разряда энергохранящих элементов (1, 1) первого регулятора, а выходом - со входом первого регулятора (1, 1, 1, 1) блокуправления переключением элементов (1, 2) соответственно первого (1, 1, 1, 1) и второго (2, 2, 2) регуляторов в зависимости от управляющего сигнала в соответствии с алгоритмом управления,основанным на аналитической модели упомянутого первого регулятора (1, 1, 1, 1). 14262 1 2011.04.30 2. Преобразователь по п. 1, отличающийся тем, что блокуправления выполнен с возможностью формирования сигнала с первым рабочим цикломдля управления переключением упомянутого элемента (1) и сигнала со вторым рабочим цикломдля управления переключением упомянутого элемента (2) таким образом, чтобы рабочие циклы (, ) не перекрывались по времени. 3. Преобразователь по п. 2, отличающийся тем, что блокуправления выполнен с возможностью периодической установки длительности (, ) импульсов переключения в каждом цикле. 4. Преобразователь по п. 3, отличающийся тем, что блокуправления выполнен с возможностью установки длительности (, ) импульсов переключения с учетом предшествующего состояния, по меньшей мере, первого регулятора (1, 1, 1, 1),например состояния в предыдущем цикле переключения. 5. Преобразователь по любому из пп. 2-4, отличающийся тем, что блокуправления предназначен для применения случайного и изменяемого временного дрожания для переключения упомянутых элементов (1, 2). 6. Преобразователь по п. 1, отличающийся тем, что содержит фильтр , выполненный с возможностью фильтрации шума переключения и включенный между первым регулятором (1, 1, 1, 1) и нагрузкой. 7. Преобразователь по п. 6, отличающийся тем, что фильтрсодержит режекторный фильтр. 8. Преобразователь по п. 1, отличающийся тем, что содержит блок , выполненный с возможностью определения, по меньшей мере, некоторых из переменных величин(1, 0), характеризующих состояние первого регулятора (1, 1, 1, 1), причем блок управления соответствующими входами соединен с выходами упомянутого блока и выполнен с возможностью работы в соответствии с алгоритмом управления, основанным на аналитической модели первого регулятора (1, 1, 1, 1) с учетом значений определенных переменных величин (1, 0). 9. Преобразователь по п. 1, отличающийся тем, что содержит блок , выполненный с возможностью детектирования выходного напряженияпреобразователя и на нагрузке , подключенной к выходу преобразователя, причем блокуправления соответствующими входами соединен с выходом упомянутого блокаи выполнен с возможностью работы в соответствии с алгоритмом управления, основанным на аналитической модели схемы первого регулятора (1, 1, 1, 1) с учетом значений определенного выходного напряженияи определенной нагрузки на выходе . 10. Преобразователь по п. 9, отличающийся тем, что блоквыполнен с возможностью измерения выходного напряженияи выходного тока (0) преобразователя. 11. Преобразователь по п. 1, отличающийся тем, что предназначен для питания нагрузки любого типа или исполнительного механизма. 12. Амплитудный модулятор для приема на своем входе сигнала модуляции, содержащий усилитель и источник мощности, отличающийся тем, что источник мощности содержит преобразователь мощности по любому из пп. 1-11, управляющий сигнал которого для преобразования соответствует модуляционному сигналу. 13. Радиопередатчик, содержащий амплитудный модулятор по п. 12. Изобретение относится к преобразователю мощности для соединения с источником электроэнергии и управления потоком мощности от упомянутого источника к нагрузке. Такой преобразователь обычно используется в амплитудных модуляторах для радиопередатчиков, и настоящее изобретение относится также и к амплитудному модулятору и радиопередатчику. 2 14262 1 2011.04.30 Такой преобразователь может быть применен, например, если необходимо эффективно согласовать или преобразовать мощность и управлять ею аналоговым или цифровым сигналом. При разработке радиопередатчика, способного осуществить любой тип модуляции(аналоговой и/или цифровой), обычный подход заключается в том, чтобы использовать модулятор с низким уровнем - (в декартовых координатах), соответствующий классурадиочастотных усилителей, при этом высокая эффективность не достигается, а реальная эффективность составляет менее 50 . Эта задача может быть решена с использованием полярного модулятора , показанного схематично на фиг. 1, который принимает на своем входе сигнал модуляции , разделяет его на амплитуднуюи фазовую Ф составляющие сигнала модуляции посредством, например,процессора и выдает на выходе амплитудно-модулированный радиочастотный сигнал , то есть(0 Ф(. Полярный модулятор (фиг. 1) имеет модуляцию фазы, выполняемую синтезатором ,усиление сигнала, произведенного синтезатором , с использованием цепочки радиочастотных усилителей мощностив режиме насыщения (класс , , , ,или ) для достижения высокой эффективности на радиочастоте огибающую, то есть амплитуду модулированного сигнала, введенную через преобразователь мощностив оконечном каскаде радиочастотного усилителя изменением его напряжения питания. Модулятор огибающей управляет почти всей мощностью, поглощаемой передатчиком поэтому важно, чтобы его эффективность была очень высокой. Кроме того, модулятор огибающей должен подавать на оконечный каскад усилителя изменяемое напряжение с динамическим диапазоном, устанавливаемым модулирующим сигналом . Достижение амплитудной модуляции изменением напряжения питания оконечного каскада усилителя известно в течение, по меньшей мере, 70 лет, часто называется анодной модуляцией и достигается применением модуляционного трансформатора например,,, 1943. Возможность осуществления амплитудного модулятора посредством шагового понижающего регулятора широтно-импульсной модуляции, то есть регулятора , тем самым исключая модуляционный трансформатор, была предложена приблизительно в конце 1960-х. Сегодня в научной литературе хорошо известны оба способа например, , , , , 34 2004 и в патентной документации например, патенты 3413570,3506920, 3588744,4896372. Вообще говоря, подход, предложенный в этой литературе, состоит всегда в применении регулятора с пошаговым понижением, управляющего радиочастотным усилителем мощности класса , , , ,илиили других классов с насыщением, изменением его напряжения питания. Дальнейшее развитие было предложено в 1999 г. в патенте 6636112, в котором предлагается добавленный каскад срегулятором пошагового понижения, причем линейный регулятор имеет двойные функциональные возможности) для следования за более быстрой динамикой сигнала, компенсируя трудности, присущиерегулятору, описанные ниже в настоящем документе,) для снижения шума, привносимого переключением врегуляторе, который обычно приводит к паразитным компонентам в передаваемом сигнале патент 6636112,столбец 8, строки 34-39. Такой линейный регулятор снижает общую эффективность системы, поскольку в силу своих свойств она рассеивает часть энергии, поставляемойрегулятором патент 6636112, столбец 9, строки 7-13. 3 14262 1 2011.04.30 В патенте 6636112 (столбец 8, строки 1-14) предполагается, что сопротивление оконечного каскада на его вводе питания постоянно. Задачей настоящего изобретения является устранение или сокращение недостатков предшествующего уровня техники. Поставленная задача решена путем создания преобразователя мощности, имеющего характеристики, указанные в формуле изобретения, которую следует рассматривать совместно с настоящим описанием. Настоящее изобретение основано на идее восстановления избыточной энергии, накопленной на выходе, с использованием подходящей схемы и, в частности, передачи ее на вход. Дополнительный инновационный аспект настоящего изобретения можно понять при изучении патента 6636112, столбец 8, строки 1-14, где предполагается, что сопротивление оконечного каскада на его вводе питания постоянно. Это справедливо только при наличии идеально согласованных нагрузок и важно в вышеупомянутом патенте для успешного и независимого от всего расчета напряжения, подаваемого на оконечный каскад для получения желательной мощности. В решении, предложенном настоящим изобретением, такое ограничение отсутствует способ управления позволяет рассчитывать (периодически) рабочий цикл, реализуемый(для получения напряжения, подаваемого на оконечный каскад) даже при наличии усилителя мощности, сопротивление которого на вводе питания изменяется. Истинное сопротивление усилителя мощности поэтому может быть измерено (периодически), и это значение (или среднее от этого значения) может быть использовано в следующем цикле. Поэтому с настоящим изобретением (в силу также оригинального способа управления) могут использоваться существенно несогласованные или изменяющиеся нагрузки. Ниже изобретение поясняется подробнее с помощью соответствующих чертежей,предназначенных только для пояснения, но не в качестве ограничивающих примеров, на которых фиг. 1 изображает блок-схему передатчика с амплитудной модуляцией согласно изобретению фиг. 2 - упрощенную схему первого варианта реализации преобразователя, согласно изобретению фиг. 3 - диаграмму фазора на - плоскости, согласно изобретению фиг. 3 - диаграмму изменения амплитуды фазора на фиг. 3 со временем и соответствующего выходному напряжению преобразователя, согласно изобретению фиг. 4 - диаграммы изменения тока 1 в соответствии с формулой (3) и изменения напряженияв соответствии со вторым предположением, на котором основывается аналитическая модель настоящего изобретения и с формулой (4), согласно изобретению фиг. 5 - возможный вариант изменения тока 2 и соответствующий интеграл , вычисленный в соответствии с формулой (19), согласно изобретению фиг. 6 - упрощенную схему второго варианта реализации преобразователя, согласно изобретению фиг. 7 - упрощенную схему третьего варианта реализации преобразователя, согласно изобретению. Для достижения высокой эффективности преобразователь в соответствии с настоящим изобретением использует широтно-импульсную модуляцию или , показанную на фиг. 2, 6 и 7. Один из инновационных аспектов настоящего изобретения заключается в объединении двух различных регуляторовпервого, состоящего из катушки индуктивности 1,конденсатора 1, транзистора 1 и диода 1, являющегося регулятором пошагового снижения и управляющего потоком мощности из главного источника питания, то есть источника положительного напряжения , на нагрузку , предположительно фактически резистивную второго, состоящего из катушки индуктивности 2, транзистора 2 и диода 4 14262 1 2011.04.30 2, являющегося регулятором пошагового повышения и обеспечивающего быстрый разряд схемных элементов 1 и 1, то есть двух элементов первого регулятора, которые сохраняют энергию. Другими словами, регулятор пошагового повышения пригоден для передачи, без рассеивания, энергии от элементов схемы 1 и 1 к главному источнику . Для достаточно быстрого выполнения предпочтительно используется вторичный источник электропитания, то есть источник отрицательного напряжения . Естественно, два регулятораи их элементы 1 и 2 схемы переключения,управляются соответствующим блокомуправления (фиг. 2, 6 и 7) элемент 1 управляется сигналом переключения с рабочим циклом , и элемент 2 управляется сигналом переключения с рабочим циклом . Что касается элементов схемы переключения, то при соответственном выборе управляющей схемы транзисторы 1 и 2 могут быть -канальными или -канальными структурами , независимо один от другого, или могут быть транзисторами других типов. Что касается диодов 1 и 2, то они могут бытьпереходом или диодами Шоттки. Кроме того, эти диоды могут быть заменены или собраны вместе с транзисторами, например соответствующим образом управляемойструктурой, для получения очень ограниченного скачка напряжения на этих элементах схемы в течение режимов проводимости это дополнительно увеличивает эффективность. Главный генератордолжен обеспечивать подачу всей необходимой мощности на оконечный каскад радиочастотного усилителя. Пошаговый понижающий регулятор, управляемый сигналом с рабочим циклом , передает мощность на выход, позволяя выходному напряжениюизменяться, как это требуется в соответствии с модуляционным сигналом . Установившийся отклик регулятора пошагового снижения имеет вид(1),где- напряжение главного источника(0,) - выходное напряжение(0,1) - рабочий цикл. Динамический отклик различается это вызвано двумя различными физическими явлениями, то есть низкочастотным линейным откликом элементов 1, 1,и нелинейным откликом вследствие топологии элементов 1 и 1 схемы, которая позволяет току протекать отдо , но не наоборот. Линейное поведение регулятора пошагового снижения может быть скомпенсировано для действия на рабочий циклсигнала, управляющего транзистором 1. Пошаговый понижающий регулятор обнаруживает нелинейное поведение, если для выходного напряжениятребуется крутой отрицательный наклон в этом случае ни транзистор 1, ни диод 1 не могут удалить энергию из катушки индуктивности 1 и конденсатора 1 и выходное напряжение падает в соответствии с законом -1/1. Можно показать, что нелинейное искажение начинается тогда, когда наклон (отрицательный) желаемого выходного напряжения превышает время релаксации схемы с 1, 1, (фиг. 3)(2)01 1 Прямое следствие формулы (2) заключается в том, что максимально допустимый наклон выходного напряжения 0 стремится к нулю. Если напряжение 0 близко к нулю,то выходное сопротивлениене обеспечит быстрый разряд конденсатора 1 и в результате напряжениебудет иметь (отрицательную) производную, близкую к нулю. Этот результат показывает главную проблему, связанную с топологией пошагового снижения схема не может воспроизвести формы сигналов с острыми перегибами вблизи нуля. 5 14262 1 2011.04.30 Типичный пример показан на фиг. 3, в частности на фиг. 3 показана траектория фазора ( ) с модулеми фазой Ф, который, на - плоскости проходит через начало координат траектории этого типа обычны для многих схем модуляции, таких как или других. На фиг. 3 показано соответствующее изменение амплитудыфазора ( ) и действующего выходного напряжениявыходное сопротивлениеблизко к острому перегибу и не может разрядить конденсатор 1 достаточно быстро, и в результатеотклоняется от . Для решения этой специфической задачи используется регулятор пошагового повышения. Второй регулятор, управляемый сигналом с рабочим циклом , существует для обращения направления потока энергии от выхода или, еще лучше, от элементов 1 и 1 к главному источнику . Регулятор пошагового повышения использует поддерживающий отрицательное напряжение источникдля увеличения скорости разряда схемы выхода. Таким образом, этот модулятор может следовать и за быстрой динамикой сигнала модуляции и за прохождением через ноль, и приближение к нулю с ненулевой производной сигнала модуляции. Кроме того, регулятор пошагового повышения, допуская удаление избыточной энергии на выходе посредством ее передачи главному генератору , поддерживает и полную эффективность на высоком уровне. Использование регуляторовпошагового снижения и пошагового повышения для изменения напряженияприводит к высокой эффективности и высокой динамичности, но привносит шум на частоте переключения и на ее гармониках. Этот шум может быть замечен из-за присутствия паразитных компонент в амплитудной модуляции (на частоте переключения и на ее гармониках) с возможными проблемами шума соседнего канала. Частота переключения должна (в соответствии с теоремой Найквиста), по меньшей мере, вдвое превышать максимальную ширину спектра сигнала модуляции. Результат состоит в том, что проблема передачи паразитных компонент относится не к внутриполосному сигналу, а к смежным каналам. Для решения этой проблемы рассматривается два различных подхода. Первый подход заключается в удалении нежелательных частот (частоты переключенияи ее гармоник 2, 3) путем использования составного режекторного фильтра. Изменение фазы, вводимое этим фильтром на частотах огибающей модулятора, рассматривается как часть полного отставания по фазе междуи . Режекторный фильтр при этом имеет структуру, которая минимизирует эквивалентную емкость относительно земли, поскольку она добавляется к емкости конденсатора 1 и он является главным элементом, отвечающим за отмеченные выше нелинейные искажения. На фиг. 2, 6 и 7 составной режекторный фильтр обозначен как . Второй подход заключается в растягивании нежелательных частот путем применения случайного и изменяющегося временного дрожания для переключения при соответствующем небольшом, непрерывном и случайном изменении продолжительностипериода переключения. Это простое схемное решение увеличивает сложность управляющего блока(фиг. 2, 6 и 7) не только из-за введения генератора случайного сигнала, но также и потому,что в формулах алгоритма управления длительность периода переключения становится переменной. Следует отметить, что эти два подхода могут успешно использоваться одновременно. Относительно управления систему можно рассматривать как имеющую два входа, то есть рабочие циклыи , и один выход, то есть выходное напряжение . Поэтому была разработана аналитическая модель, предназначенная для цифрового электронного управления. 14262 1 2011.04.30 Эта модель рассчитывает значение выходного напряжениякак функцию рабочего циклав конце каждого цикла переключения. Эта модель может легко быть инвертирована, представляя рабочий циклкак функцию выходного напряжения . Приемлемый диапазон значений длянаходится между 0 и 1 если рассчитанное значениеменьше нуля, то алгоритм рассчитывает рабочий цикл , который гарантирует желаемое выходное напряжение. Далее сделаны следующие шесть допущений. В соответствии с первым допущением напряжение 0 на конденсаторе 1 равно выходному напряжениюв диапазоне изменения . Такое допущение оправдано режекторной структурой выходного фильтра, который поэтому существенно не ослабляет сигналы в спектре сигнала модуляции. В соответствии со вторым допущением напряжение 0 на конденсаторе 1 постоянно в течение каждого цикла переключения. В соответствии с третьим допущением усилитель мощности представляется как резистор со значением . Далее в описании допускается, что сопротивлениепостоянно в каждом цикле переключения. Если усилитель мощности представить как имеющий характеристику, то можно также учесть возможное нелинейное поведение усилителя в модели. В этом случае может использоваться следующее выражение. В соответствии с четвертым допущением пороговое напряжение диода 1 и диода 2 предполагается равным нулю. В соответствии с пятым допущением ток 2, текущий через катушку индуктивности 2,равен нулю в конце каждого цикла переключения. Этот выбор был сделан, поскольку поток энергии главным образом направлен от источникана нагрузкуи только в некоторых частных случаях - в обратном направлении. Таким образом возникают два преимущества. Первое преимущество связано с тем фактом, что имеются только две (вместо трех) переменные состояния для системы, поскольку две являются компонентами, сохраняющими энергию от одного цикла к другому, а именно катушка индуктивности 1 и конденсатор 1. Второе преимущество связано с тем фактом, что конструкция позволяет избежать энергетических петель. Другими словами, никогда не возникает нежелательный режим,при котором энергия берется от источника , переносится на выход (регулятором пошагового снижения) и затем возвращается (регулятором пошагового повышения) к источнику . В соответствии с шестым допущением изменение в рабочем циклеот одного цикла переключения до следующего оказывается малым по сравнению с рабочим циклом. Модель использует два соотношения непрерывность тока 1, текущего через катушку индуктивности 1, отображается приведенной ниже формулой (3), и сохранение заряда на конденсаторе 1 отображается приведенной ниже формулой (4). 1 На фиг. 4 показано, как изменяется ток 1 и как изменяется напряжениев соответствии со сделанными допущениями. Подставляя в формулы (3) и (4) нижеследующие формулы (5), (6) и (7), получаем следующие формулы (8) и (9) Формулы (8) и (9) отображают упрощенно, но очень эффективно модель пошагового понижающегорегулятора и позволяют рассчитать напряжение 0 на конденсаторе 1 (которое соответствует выходному напряжению ) и ток 1, протекающий через катушку индуктивности 1, в цикле 1 на основе значений тока 1, напряжения ,рабочего циклаи длительностипериода переключения в цикле . На основе этой аналитической модели могут быть осуществлены эффективные способы управления элементами переключения регуляторов , включенных в преобразователь мощности в соответствии с настоящим изобретением. Первый способ управления основан просто на аналитической модели с использованием формул (8) и (9). Упрощенная схема соответствующего преобразователя показана на фиг. 2. Проблема, которая должна быть решена, заключается в расчете того, какой рабочий(1 циклдолжен быть применен к циклу на фиг. 4) с) (новое целевое напря( жение),и 1 ) (настоящие значения двух переменных состояния системы) и при известном . Поэтому формула (9) должна быть обработана, выражая рабочий циклкак функцию остальных параметров. Проблема заключается в нелинейности формулы (9) относительно рабочего цикла . Вместо того, чтобы решать квадратное уравнение со сложной обработкой, которая потребовала бы сложную логическую схему, вводится предварительно упомянутое шестое допущение совместно с тем фактом, что изменение в выражении 1( ) 2 определенно меньше, чем изменение в(оба присутствуют во втором слагаемом формулы (9. Поэтому это приводит к Формула (10) позволяет получать рабочий цикл , реализуемый в цикледля по( лучения напряжения, с известными значениями, 1 ) и( 1) . Логический блокуправления проводит расчет в каждом цикле по следующей паре формул, причем формула (11) вначале следует за формулой (12)(12), если 1 1)01 1)0. 1 1 Полагая, что ток 1 не может изменить свое направление, формула (12) должна ограни(( чиваться нулем, то есть если 1 1)01 1)0 . Результат формулы (11), однако, может быть положительным или отрицательным, но отрицательный рабочий цикл не имеет никакого физического смыла. В этом случае мо( дель указывает на то, что для достижения требуемого напряжения 1) заряд немедленно следует отвести от 1, и это может быть достигнуто установкой 0 и 0. Формулы (8) и (9) модели в этом случае будут оставаться справедливыми, установкой 0 и с добавлением величины заряда( ) , который должен быть удален от 1, имеем( В рассматриваемом цикле заряд( ) , удаляемый от С 1 для получения 1) , может быть рассчитан как 2 Следует отметить, что формула (15), кроме масштабного множителя -1, соответствует числителю формулы (11) и поэтому не должна быть повторно пересчитана. Если поэтому в циклерезультатом является 0, то должно быть положено 0, и удаляемый от конденсатора 1 заряд должен быть рассчитан на основе формулы (15) (причем заряд является определенно положительным, поскольку знаменатель формулы (11) определенно положительный). В этом смысле, используя также ранее упомянутое пятое допущение, рабочий цикл(может быть рассчитан по заряду) (фиг. 5)( )Ограничение, наложенное в соответствии с ранее упомянутым пятым допущением, отражено в максимальном значении, которое должно быть равно 1. Из этого следует,что) не может превысить некоторое значение, которое обозначим какможет быть рассчитано как функция) В заключение, алгоритм для расчетаиследующий. Этап 1 (первый способ) 2 где) должен быть ограничен дов соответствии с (18). Этап 3 (первый способ)( если 01 1)0. Формула (23) наиболее трудна для расчета посредством назначенной логической схе мы из-за наличия выражения и из-за квадратного корня. Учитывая, что разряд (и поэтому расчет по формуле (23 имеет место обычно, когда мало, может быть применено следующее приближение Второй способ управления основан на аналитической модели формул (8) и (9), но вме( сто получения 1 ) из модели и допуская, что требуемоеэто действительно то, что получено, он измеряет эти две величины. Упрощенная схема соответствующего преобразователя показана на фиг. 6, которая отличается от схемы на фиг. 2 добавлением двух элементов- аналого-цифровых преобразователей для выполнения измерений. Этот второй способ имеет следующие преимущества меньшая сложность алгоритма, поскольку расчетов, относящихся к этапам 3 и 4, указанным выше, можно избежать возможность включения защитных мер против избыточных токов или избыточных напряжений более точное управление в течение начального переходного процесса, когда ток 1 модели еще недостаточно стабилен. Естественно, необходимо обеспечить измерение схемой вышеупомянутых величин. 14262 1 2011.04.30 Идея заключается в том, чтобы использовать измеренные величины не для управления замкнутым контуром в обычном смысле, но как начальные значения цикладля расчета посредством модели рабочего цикла.(( ) Прии 1 ) , используемых для указания измерений, алгоритм оказывается состоящим просто из следующих двух этапов. Этап 1 (второй способ) где- следующее значение выходного напряжения как следствие входного . Этап 2 (второй способ) где) должно быть ограничено значениемв соответствии с (18). Третий способ управления основан на аналитической модели формул (8) и (9), но он требует измерения выходного напряженияи определения используемой на выходе нагрузки, в частности фактического значения резистивной нагрузки . В примере на фиг. 7 нагрузка определяется измерением выходного тока 0 отношение измеренного значения напряженияи измеренного значения тока 0 соответствует значению сопротивления нагрузки. Нагрузка может быть определена другими способами, например измерением мощности, передаваемой на нагрузку, или измерением входного тока преобразователя и оценкой выхода преобразователя. Упрощенная схема преобразователя, основанного на этом способе, показана на фиг. 7 это отличается от схемы на фиг. 2 добавлением двух элементов- аналого-цифровых преобразователей для выполнения измерений. Истинное сопротивление усилителя мощности, в частности его выходного каскада,может поэтому быть задано (цикл за циклом, если это желательно), и упомянутое значение (или среднее его значение) может быть использовано в следующем цикле для точного расчета рабочего цикла, необходимого для получения желательной мощности. Прии(0 ) , используемых для указания измерений, алгоритм оказывается состоящим из следующих этапов. Этап 1 (третий способ) 2( где 1) - следующее значение выходного напряжения как следствие входного сигнала 1 ) - значение тока через катушку индуктивности 1, рассчитанное с использованием( модели( )/0 ) - резистивная нагрузка, которую усилитель мощности имеет на вводе питания. где) должен быть ограничен значениемв соответствии с (18). Этап 3 (третий способ)( если 01 1)0. Схемы на фиг. 2, 6 и 7 достаточно полные, но упрощенные, например, схемы управления транзисторомотсутствуют также, например, только обозначена схема,формирующая сигналы напряжения, которые подаются на элементысхемы в случае определения сигнала напряжения она сводится к однопроводной, тогда как в случае определения сигнала тока она сводится к резистору, а именно к резистору . Практически, например, будет необходимо ввести схему для адаптации сигнала напряжения для возможности выборки к динамическому диапазону аналогового входного напряжения конкретных элементоввыбранной схемы в случае детектирования токового сигнала необходимо выбрать подходящий преобразователь ток-напряжение. Кроме того, детектированные сигналы должны быть соответственно отфильтрованы(сглаживающим фильтром), чтобы не допустить выборку гармоник и других частот, вне полосы элементовсхемы. Наконец, на элементысхемы должен подаваться синхронизирующий сигнал на требуемой частоте осуществления выборки. Следует отметить, что на этих схемах оба преобразователясоединены непосредственно друг с другом однако нельзя исключать, что это соединение может быть выполнено не непосредственно, а через другие элементы схемы, не представленные на этих схемах. В завершение, ниже в таблице представлен список элементов, которые могут использоваться в этих схемах. Элемент схемы Изготовитель Идентификация элемента 19343 15010 1 14262 1 2011.04.30 Ясно, что возможны различные модификации изобретения, и описанные средства или материалы могут быть заменены эквивалентными средствами или материалами без отступления от заявленных патентных притязаний. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 14
МПК / Метки
МПК: H02M 3/00
Метки: высокоэффективный, модуляторов, мощности, преобразователь, передатчиков
Код ссылки
<a href="https://by.patents.su/14-14262-vysokoeffektivnyjj-preobrazovatel-moshhnosti-dlya-modulyatorov-i-peredatchikov.html" rel="bookmark" title="База патентов Беларуси">Высокоэффективный преобразователь мощности для модуляторов и передатчиков</a>
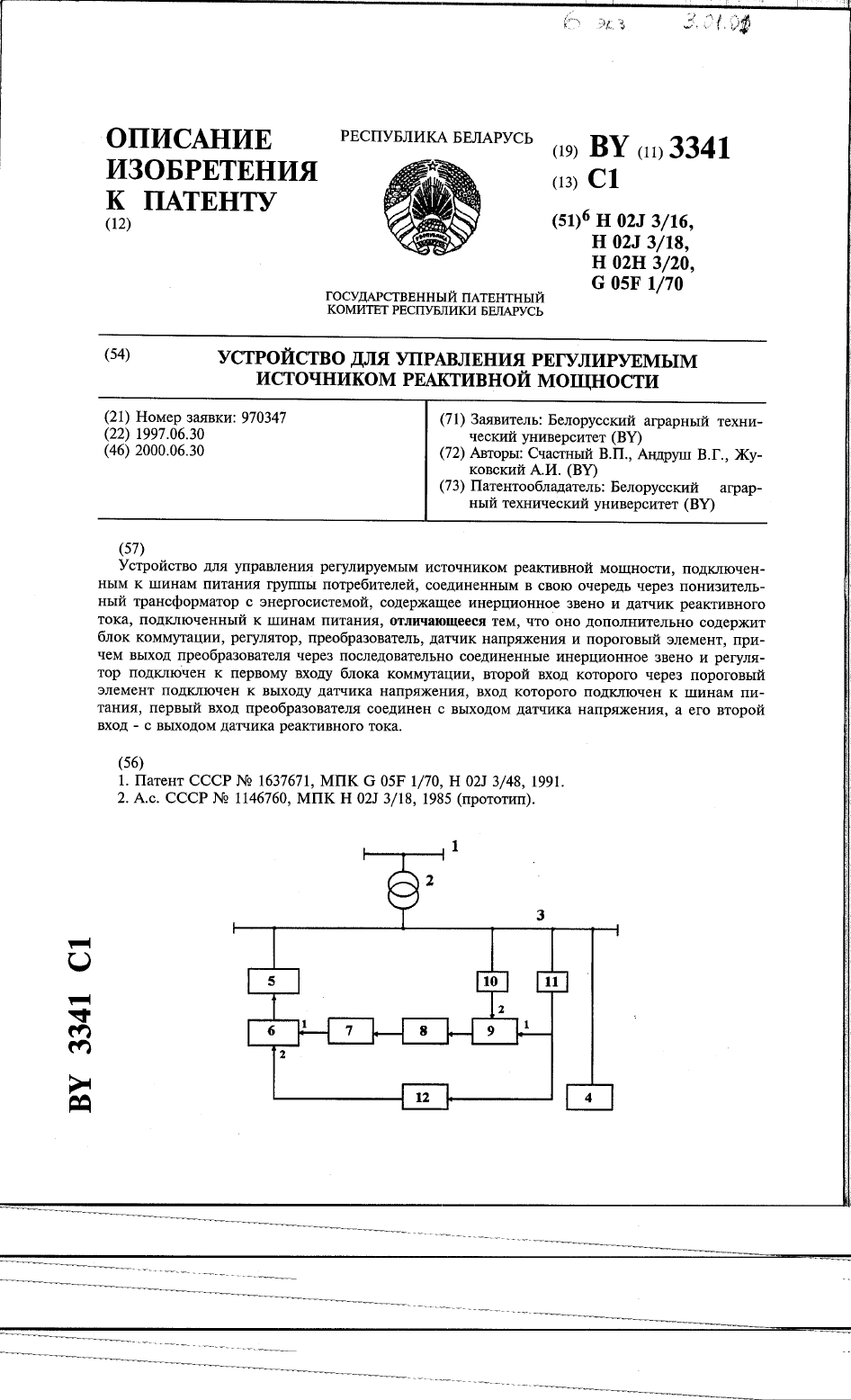
Устройство для управления регулируемым источником реактивной мощности
Номер патента: 3341
Опубликовано: 30.06.2000
Авторы: Жуковский Александр Иванович, Андруш Виталий Григорьевич, Счастный Валерий Петрович
МПК: H02J 3/16, G05F 1/70, H02H 3/20...
Метки: регулируемым, управления, устройство, мощности, источником, реактивной
Текст:
...регулятор,преобразователь, датчик напряжения и пороговый элемент, причем выход преобразователя через последовательно соединенные инерционное звено и регулятор подключен к первому входу блока коммутации, второй вход которого через пороговый элемент подключен к выходу датчика напряжения, вход которого подключен к шинам питания, первый вход преобразователя соединен с выходом датчика напряжения, а его второй вход - с выходом датчика...
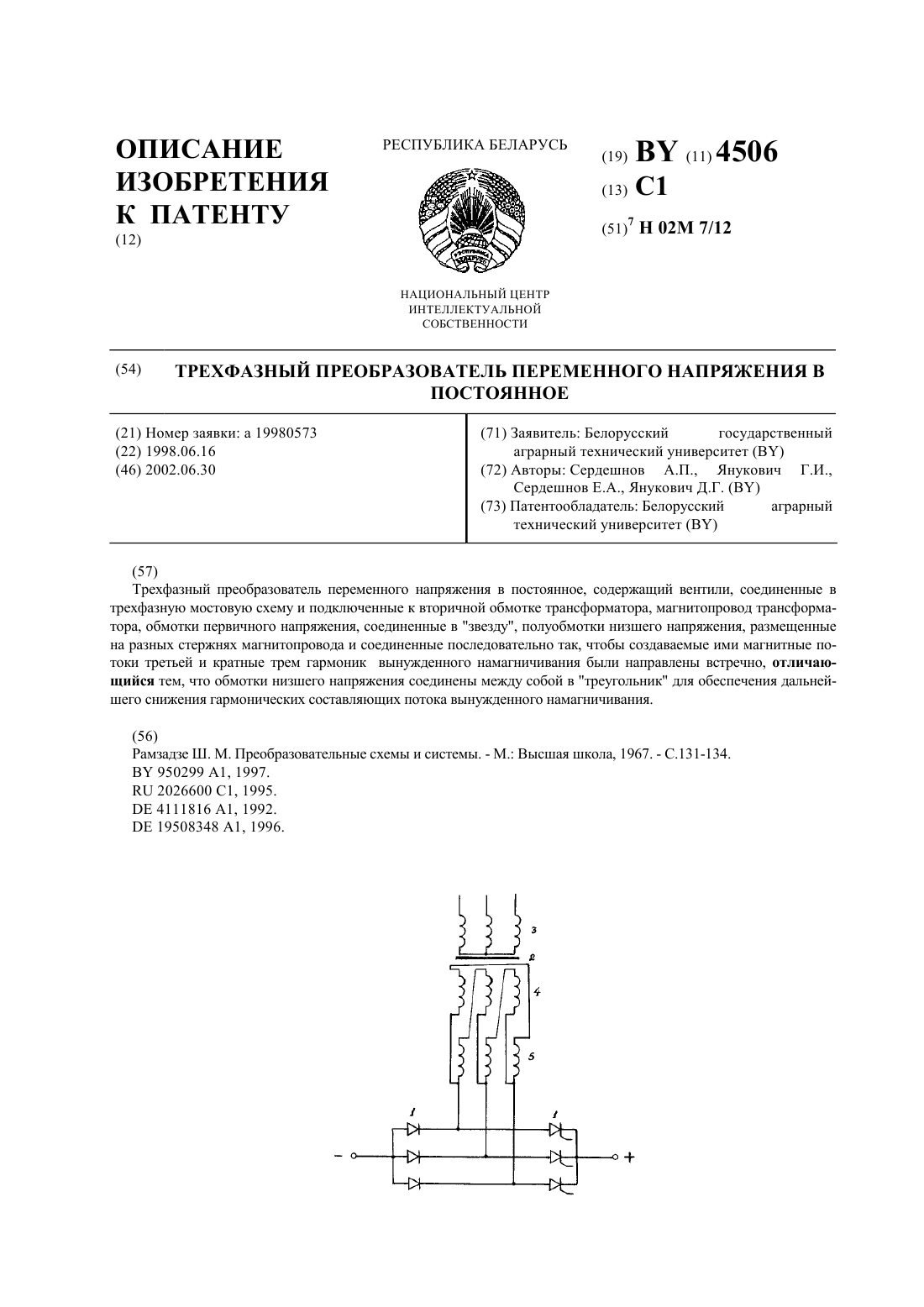
Трехфазный преобразователь переменного напряжения в постоянное
Номер патента: 4506
Опубликовано: 30.06.2002
Авторы: Янукович Дмитрий Генрихович, Сердешнов Анатолий Петрович, Янукович Генрих Иосифович, Сердешнов Евгений Анатольевич
МПК: H02M 7/12
Метки: преобразователь, трехфазный, постоянное, напряжения, переменного
Текст:
...низшего напряжения соединены в звезду 1. Недостатком такого трансформатора в выпрямительном устройстве является то, что потоки вынужденного намагничивания компенсируются не достаточно полно, а это требует увеличения сечения магнитопровода и,следовательно, повышения расчетной мощности трансформатора. Задачи, которые решает данное изобретение, заключаются в сокращении расхода электротехнических материалов, уменьшении высших гармоник в кривой...
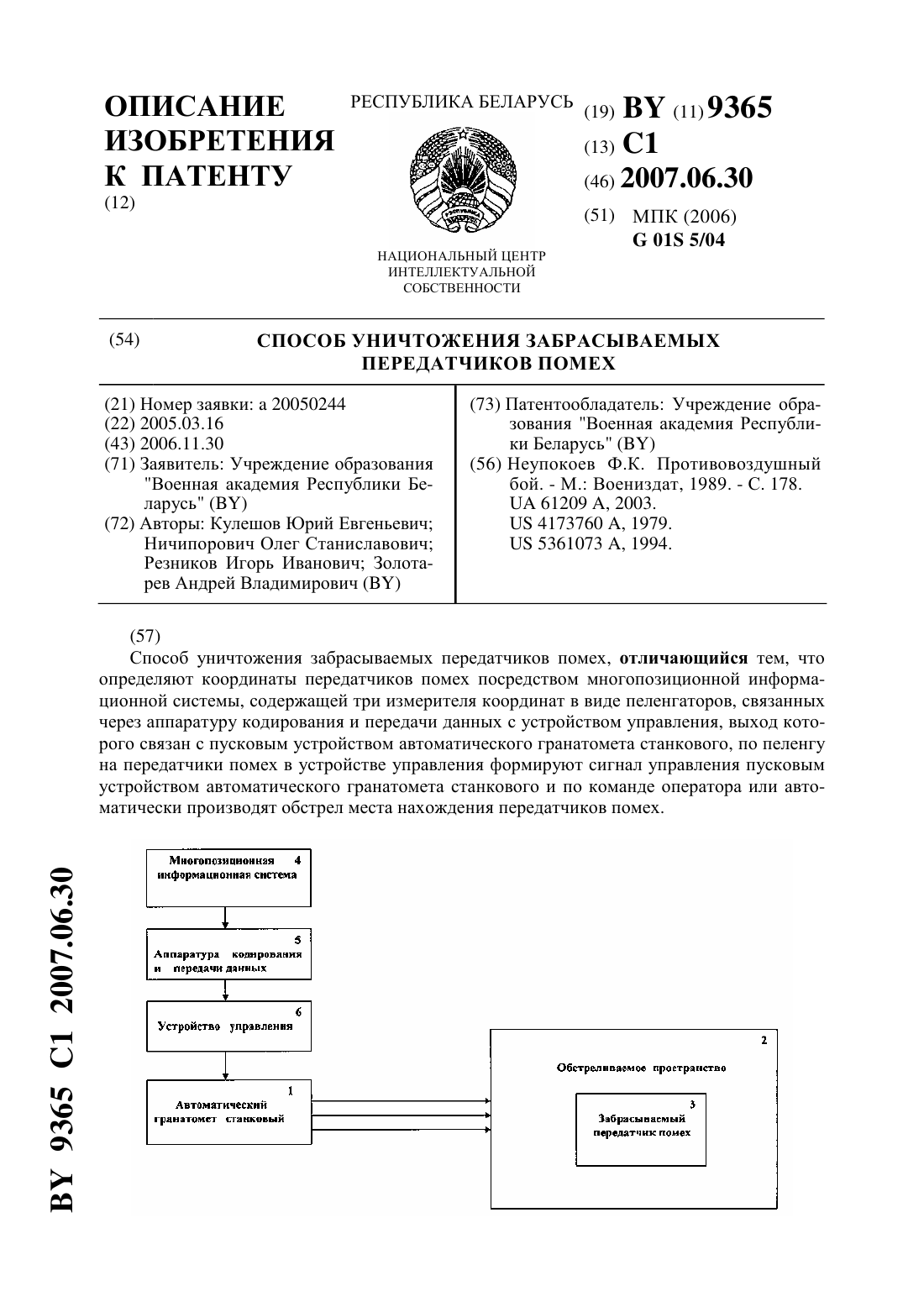
Способ уничтожения забрасываемых передатчиков помех
Номер патента: 9365
Опубликовано: 30.06.2007
Авторы: Золотарев Андрей Владимирович, Резников Игорь Иванович, Кулешов Юрий Евгеньевич, Ничипорович Олег Станиславович
МПК: G01S 5/04
Метки: забрасываемых, способ, уничтожения, передатчиков, помех
Текст:
...учета всего многообразия способов доставки забрасываемых передатчиков помех в район боевых позиций, в том числе и с использованием разведывательно-диверсионных групп и сил специальных операций. Задачей изобретения является увеличение эффективности и обеспечение безопасности уничтожения забрасываемых передатчиков помех при их обезвреживании за счет дистанционного, бесконтактного и точного поражения забрасываемых передатчиков помех с больших...
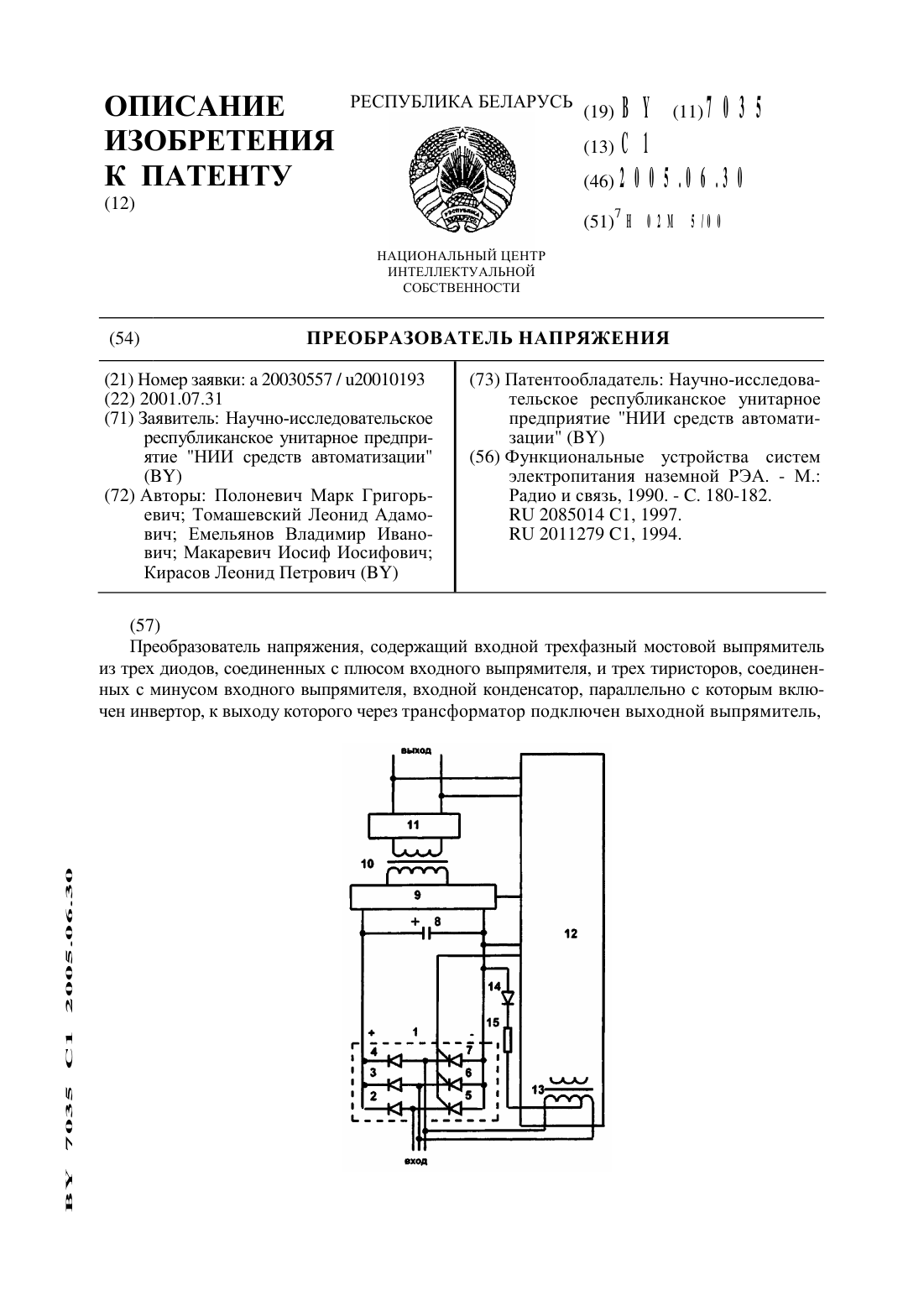
Преобразователь напряжения
Номер патента: 7035
Опубликовано: 30.06.2005
Авторы: Кирасов Леонид Петрович, Макаревич Иосиф Иосифович, Полоневич Марк Григорьевич, Емельянов Владимир Иванович, Томашевский Леонид Адамович
МПК: H02M 5/00
Метки: преобразователь, напряжения
Текст:
...в которой вспомогательный трансформатор, соединен с входом входного выпрямителя. Недостатком преобразователя является наличие в схеме плавного пуска ненадежного элемента - реле, а также тиристора, который снижает КПД преобразователя.Технической задачей изобретения является повышение надежности работы преобразователя напряжения.Поставленная задача решена при создании заявляемого объекта с техническими результатами схемная реализация...
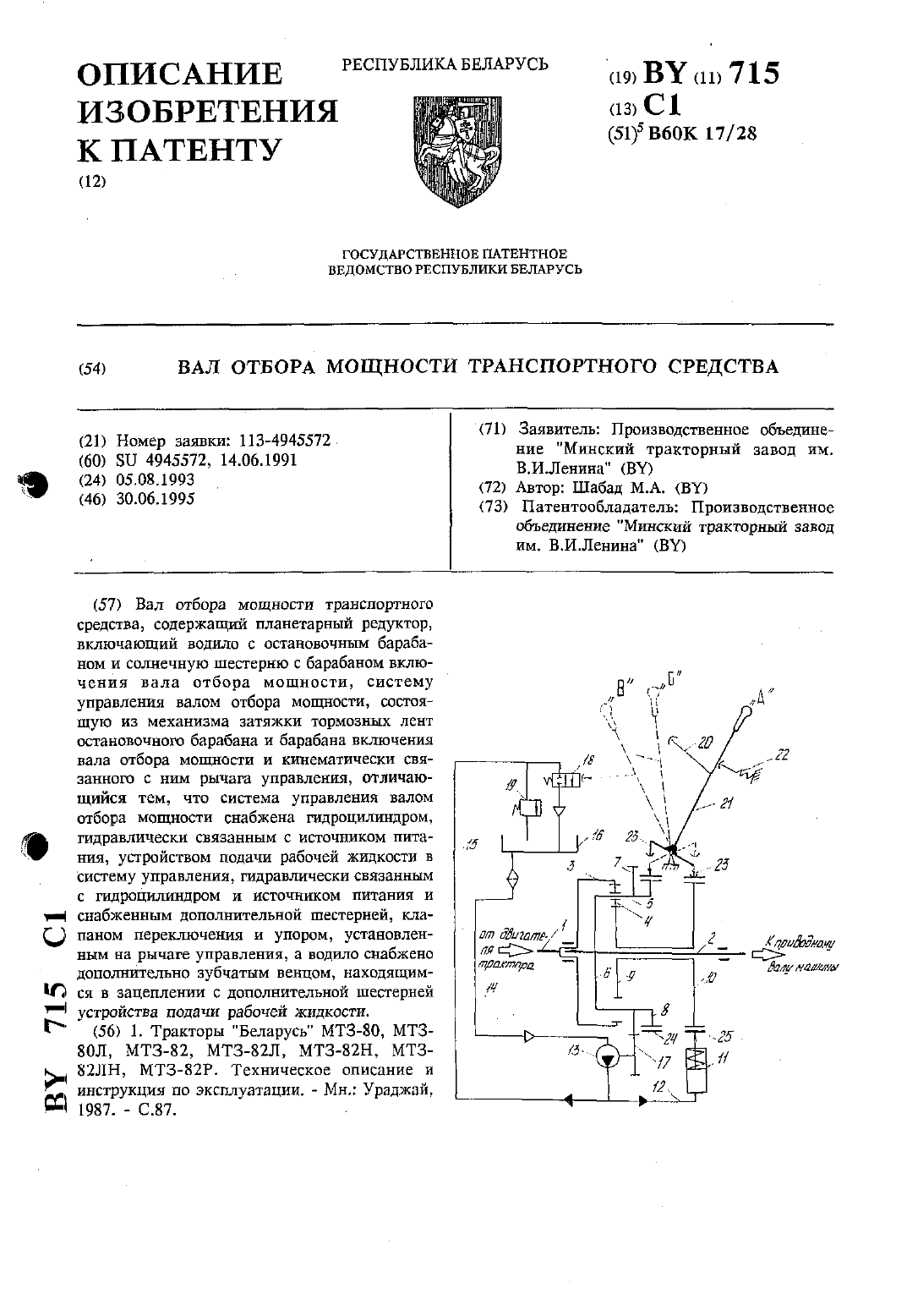
Вал отбора мощности транспортного средства
Номер патента: 715
Опубликовано: 30.06.1995
Автор: Шабад М. А.
МПК: B60K 17/28
Метки: вал, средства, отбора, мощности, транспортного
Текст:
...вал отбора мощности транспортного средства отличается тем,что система управления валом отбора мощно сти снабжена тидроцилиндром, гидравличе ски связанным с источником питания,устройством подачи рабочей жидкости в сис 10тему управления, гидравлически связанным с гидроцилнндром и источником питания и снабженным дополнительной шестерней, клапаном переключения и упором, установленным на рычаге управления, а водило снабжено дополнительно...
Предыдущий патент: Машина для уборки фрезерного торфа
Следующий патент: Устройство для контроля работоспособности сцепного устройства автотранспортного средства
Случайный патент: Захватное устройство