Цифровая система управления
Номер патента: 162
Опубликовано: 30.09.1994
Авторы: Найденов Г. А., Филиппович В. Н., Овод-Марчук Г. В.
Текст
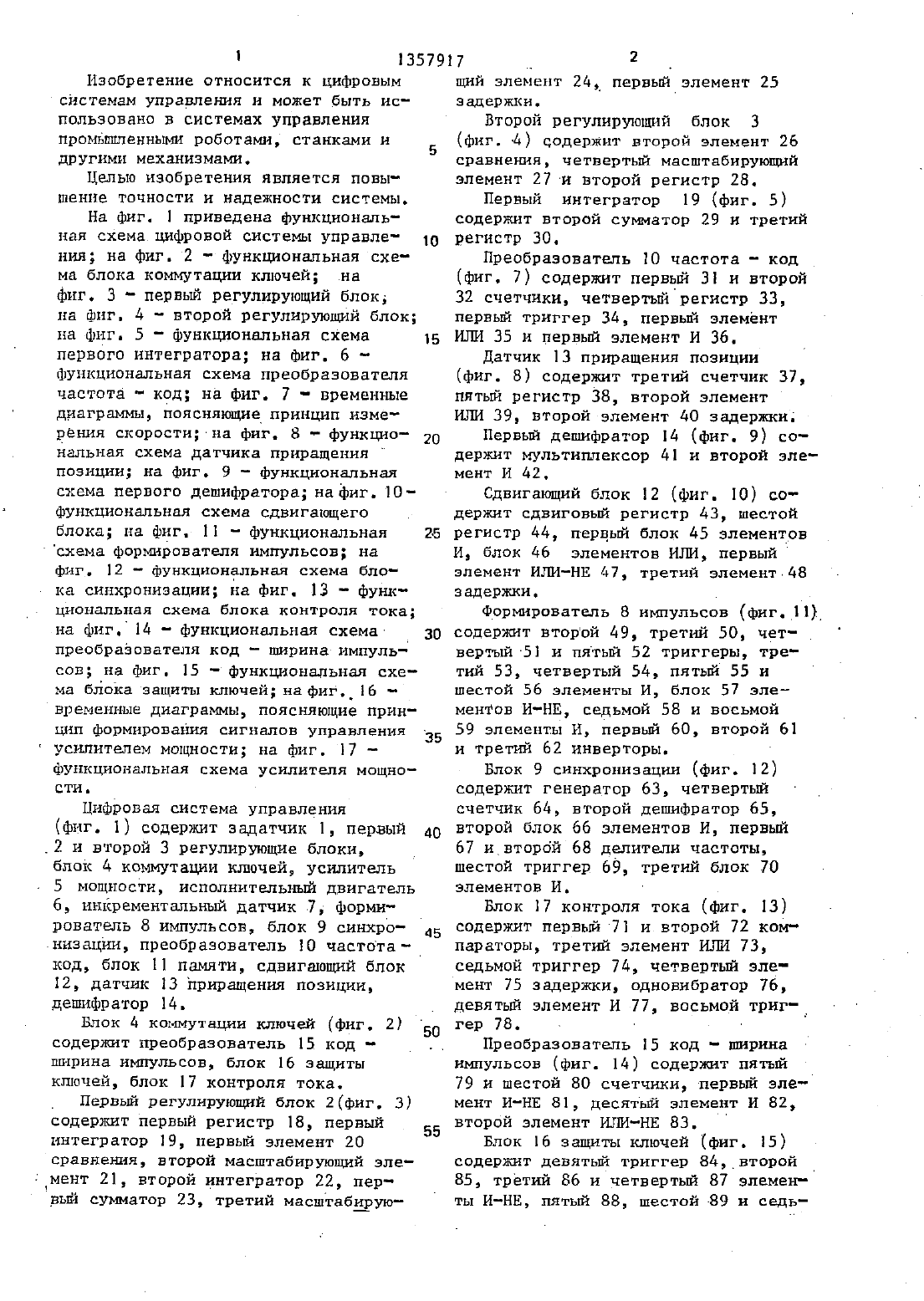
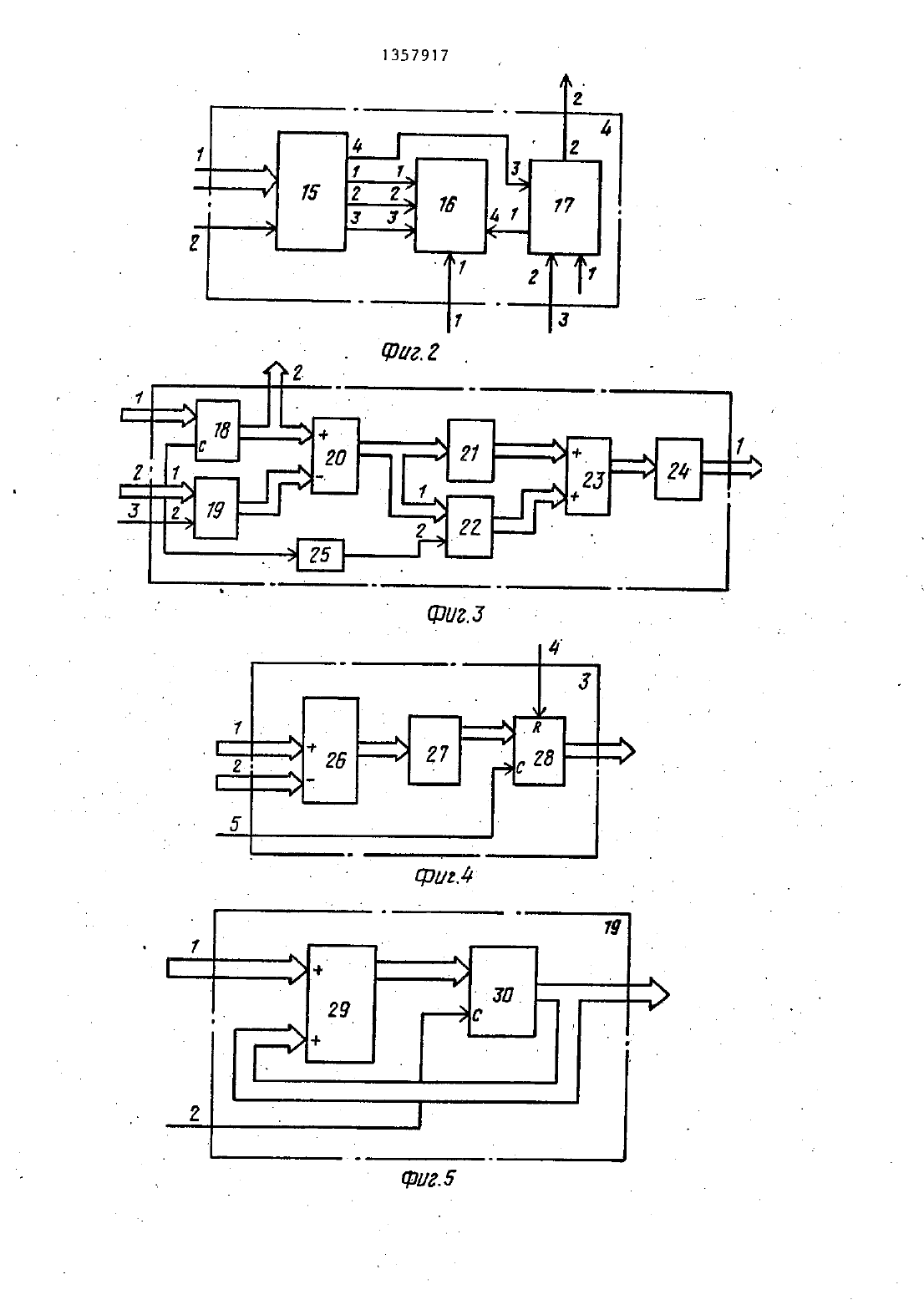
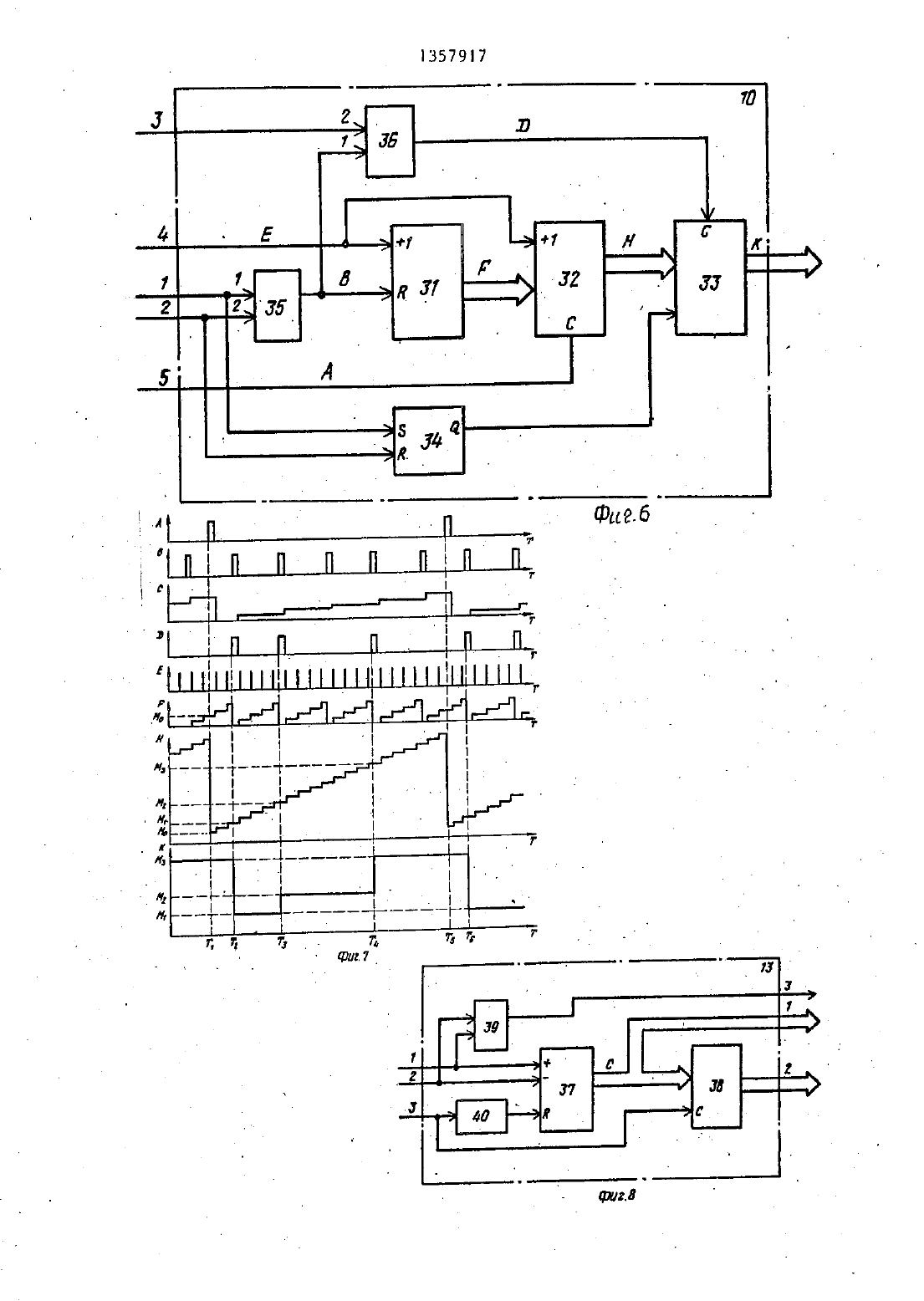
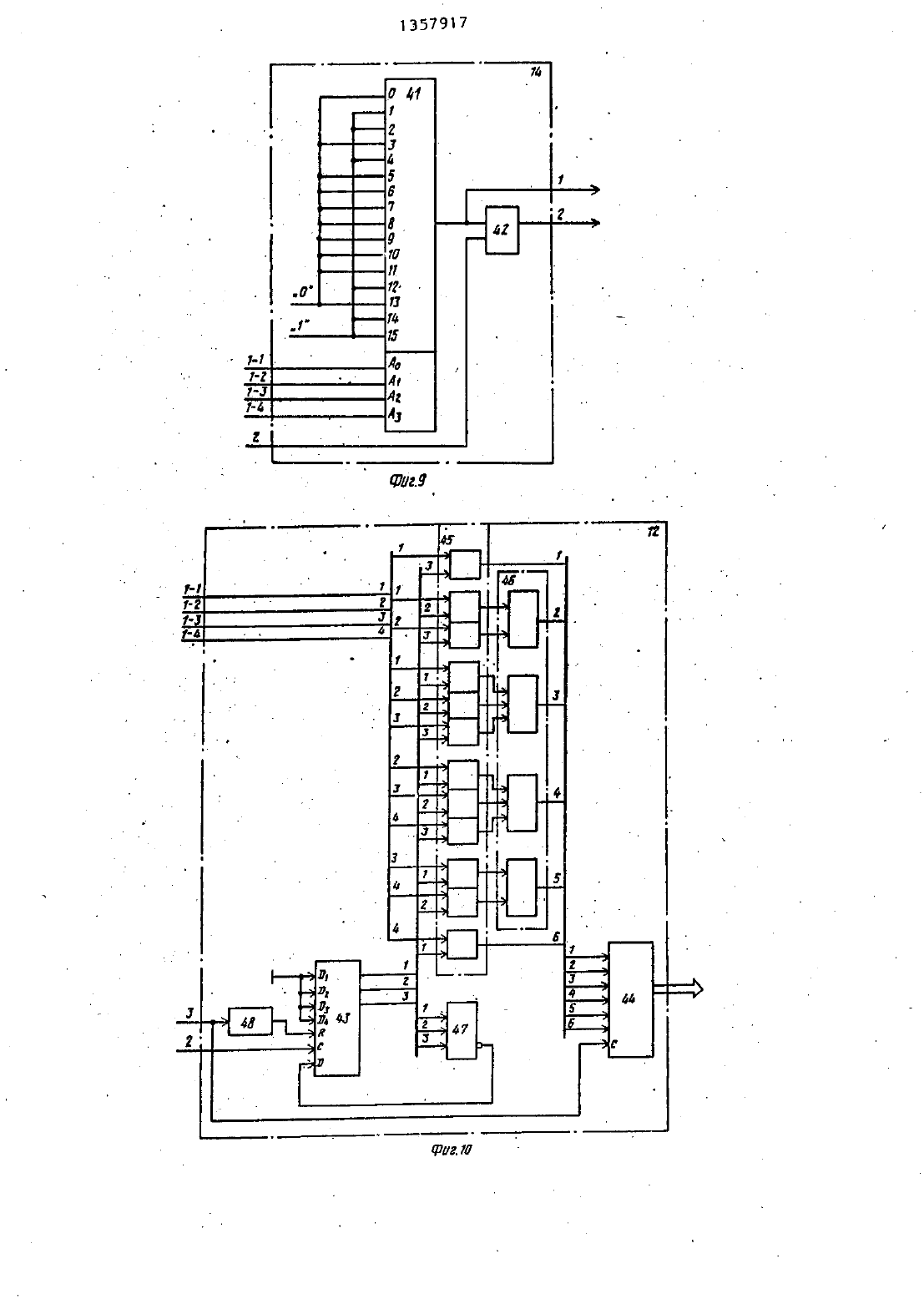
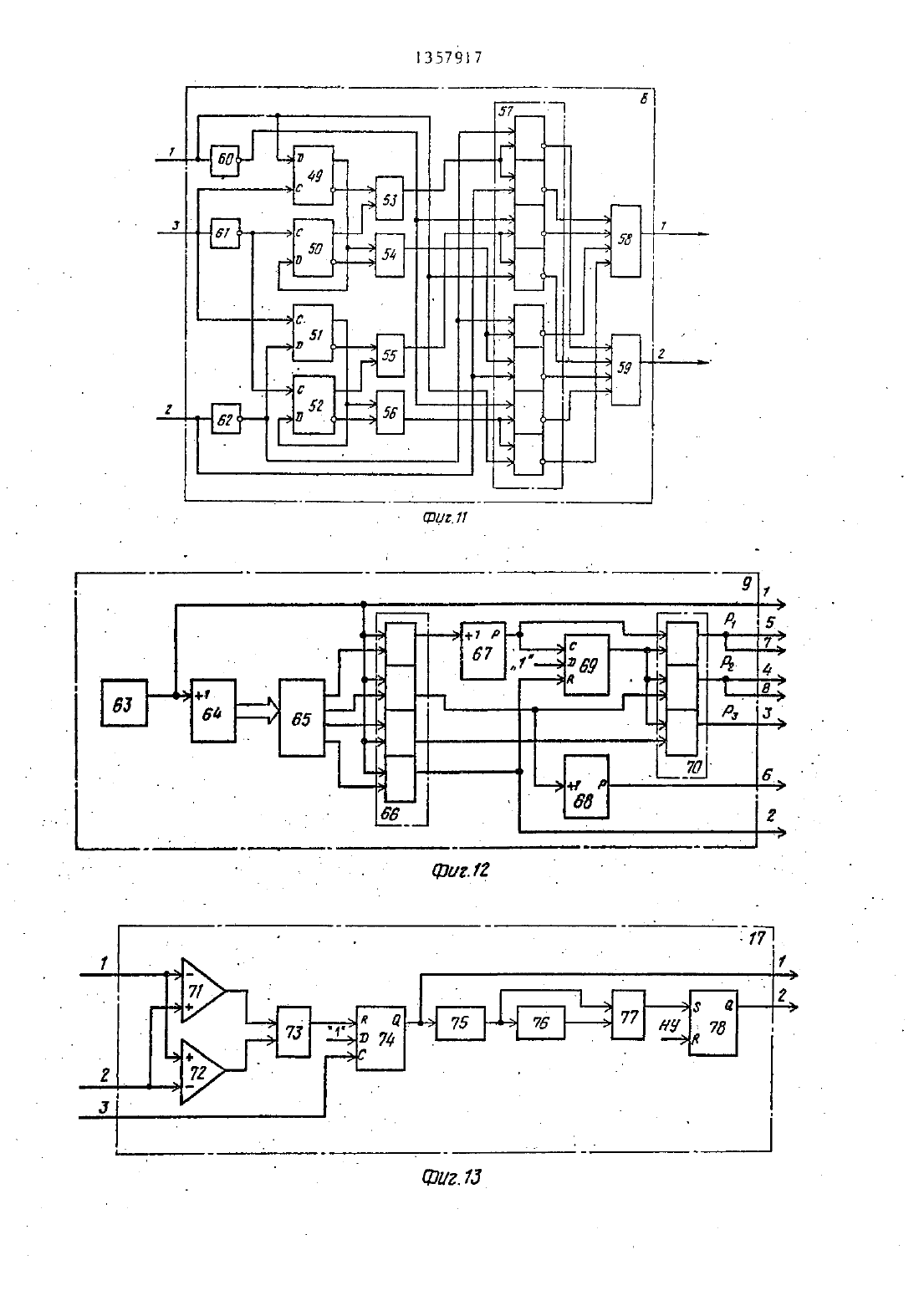
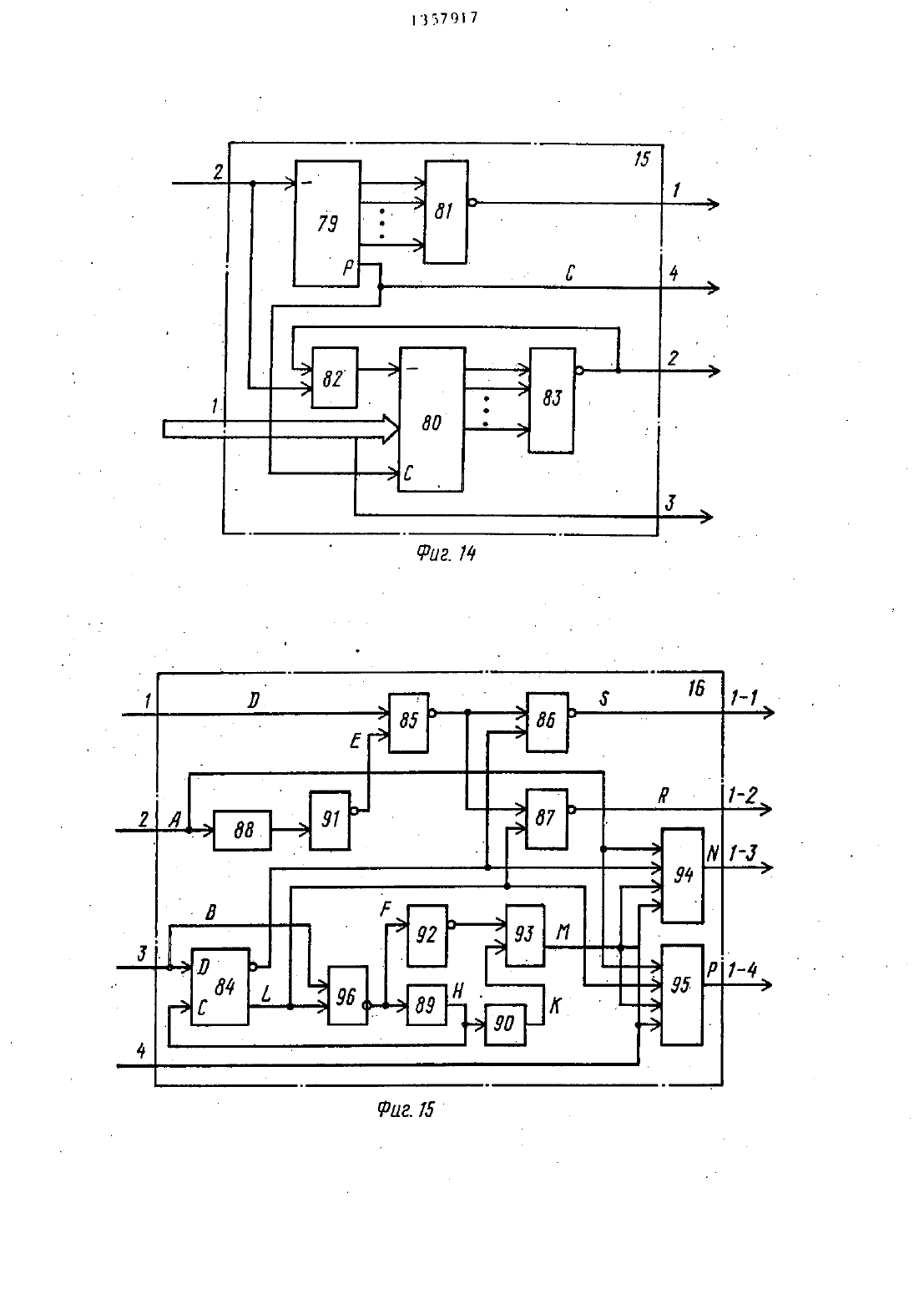
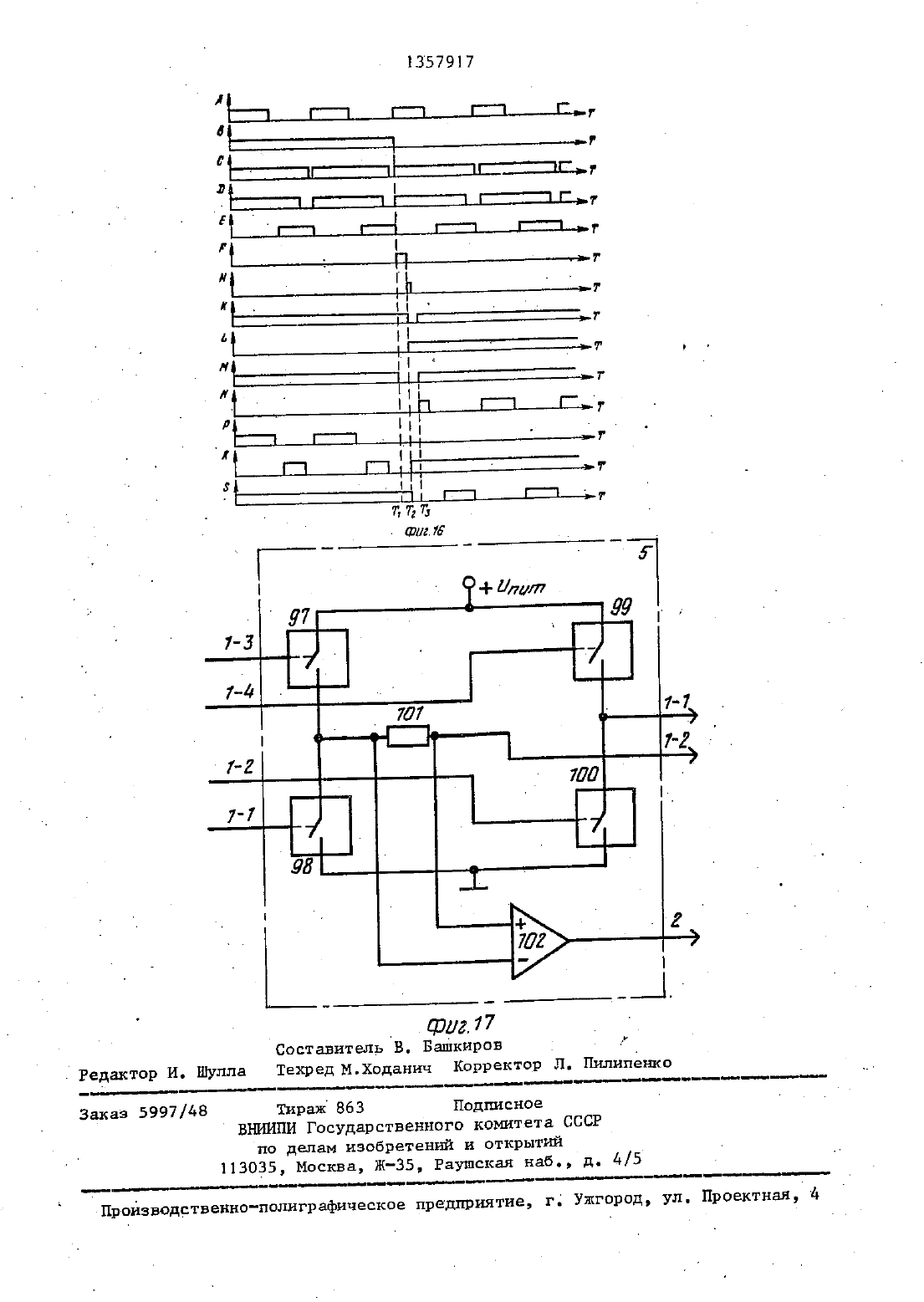
Изобретение относится к цифровым исистемам управленя и может быть нспользовано в системах управления промыленныи роботами, станками и другими механизмами.Целью изобретения является повышение точности и надежности системы.На фиг. 1 приведена функциональная скема.цифровой системы управления на фиг. 2 - функциональная скема блока коммутации ключей .на фиг. 3 - первый регулирующий блок,на фиг. 4 - второй регулирующй блок на фиг. 5 - функциональная схема первого интегратора на фиг. 6 функциональная схема преобразователя частота - код на фиг. 7 - временные диаграммы, поясняющие принцип изме рения скорости на фиг. 8 - функцио 20нальиая схема датчика приращения позиции на фиг. 9 - функциональная схема первого дешифраторан 1 фиг. 10 функциональная схема сдвигающего блока на фиг. 11 - функциональнаясхема формрователя импульсов нафиг. 12 - функциональная схема блока синхронизации на фиг. 13 - функциональная схема блока контроля тока.На фиг. 14 - функциональная схема преобразователя код - ширина импульсов на фиг. 15 - функциональная схема блока защиты ключей иа.фиг.16 временные диаграммы, поясняющие принцнп формирования сигналов управления усилителем мощности на фиг. 17 функциональная схема усилителя мощности. Цифровая система управленияПервый регулирующй блок 2(фиг. 3) содержит первый регистр 18, первый интегратор 19, первый элемент 20 сравнения, второй масштабирующий эле 5 мент 21, второй интегратор 22, пер вый сумматор 23, третий масштабирую щй элемент 24, первьй элемент 25 задержки.Второй регулирующий блок 3(фиг. 4) содержит второй элемент 26 сравнения, четверты масштабирующий элемент 27-и второй регистр 28.Первый интегратор 19 (фиг. 5) содержит второй сумматор 29 и третий регистр 30.(фиг. 7) содержит первый 31 н второй 32 счетчики, четвертый регистр 33,первьй триггер 34, первьй элемент ИЛ 35 и первьт элемент И 36.(фиг. 8) содержит трети счетчик 37,пятьй регистр 38, второй элемент ИЛМ 39, второй элемент 40 задержкиСдвнгающий блок 12 (фиг. 10) содержит сдвиговьй регистр 43, шестой регистр 44, перцьй блок 45 элементов И, блок 46 элементов ИЛИ, первый элемент ИЛ-НЕ 47, третий элемент 48 задержки.Блок 17 контроля тока (фиг. 13) содержит первьй 71 и второй 72 компараторы, трети элемент ИЛ 73,седьмой триггер 74, четвертый элемент 75 задержки, цдновибратор 76,девятый элемент И 77, восьмой трнггер 78.Блок 16 защиты ключей (фиг. 15) содержит девятый триггер 84, второй У 85, третий 86 и четверты 87 элементы И-НЕ, пяты 88, шестой-89 н седь З 1357917 4 рмой 90 элементы задержки, четвертьш 91 н пяты 92 инверторы, одиннадцатй 93, двенадцатый 94 и тринадцатый 95 элементы И, пяты элемент И-НЕ 96. Усилитель 5 мощности (фиг. 17) содержит первый 97, второй 98, третий 99 и четвертый 100 ключи, датчик 101 токаи диффереициальньй усилитепь 1 О 2 Система работает следующим образом. . Очередной цикл работы начинается с.появления на пятом выходе блока 9 синхронизации тактирующего сигнала,которьй производит в датчике 13 приращеняпозиции перезапись кода третьего счетчика 37 в пятый регистр 38(фиг. 8). Величина этого кода представляет собой перемещение исполнительного двигателя 6 за предьщущнй цикл работы системы. Одновременно тактирушцгпй сигнал с седьмого выхода блока 9 синхрониааци, поступая на пятый вход преобразователя 10 частота код, переписывает кодс выхода первого счетчика 31 во второй счетчик 32 (фиг. 6), подготавливая ЕГО ДЛЯ ИЗМЕРЕНИЯ ННТЕРВЭЛЗ В ОЧЕРЭД ном цикле работы системы.Тактирующий сигнал, поступая с четвертого выходаблока 9 синхронизации на третий вход первого регулирующего блока 2, производит запись кода приращения позиции в первый интегратор 19(фиг. 3), кода заданной позиции - в35 первым регистр 18. Величина этого кода представляет собой приращение кодазаданной позици за предыдущий цикл работы системы. Код ошибки по позиции с выхода, 40первого элемента 20 сравнения накапливается во втором интеграторе 22.Его выходной код суммируется впервом сумматоре 23 с выходным кодом второго масштабирующего элемента 21 и на выходе третьего масштабирующего элемента 24 формируется код заданной скорости. С приходом тактирующего сигнала с восьмого выхода блока 9 синхронизации на третий вход сдвигающего блока 12 (фиг. 10) на его выходе формируется код действительной скорости (КДС), который поступает на вычнтающий вход второго элемента 26 сравнения второго регулирующего блока 55 3 (фиг. 4)Ц На его суммирующий вход поступает код.заданной скорости (кзсд Код управления (КУП) с выхода четвер того масштабирующего элемента 7 пер 15вого регулирующего блока 2 записывается во второй регистр 28 второго регулирующего блока 3 тактирующим сигналом, поступающим с третьего выхода блока 9 синхронизации.Импульс с выхода заема пятого счетчика 79 преобразователя 15 код - ширина ипульсов (фиг. 15) переписывает код управления в шестой счетчик 80. Если код управления не равен нулю,уровень сигнала на первом входе десятого элемеита И 82 разрешает прохождение ипульсов на вычитающий вход Шестого счетчика 80 до момента его обнуления. Таким образом на втором вьшоде преобразователя 15 код ширина имульсов формируются импульсы длительность которых пропорциональна КОДУ управления, ЭТОТ СИГННЛ ПОЛЕ ляется на выходе тринадцатого элемента И 95 блока 16 защиты ключей(фиг. 16), если знак кода управления(ПРЯМОЙ ВЫХОД девятого триггера 84) имеет уровень логической единицы, а если знак кода управления имеет уровень логического нуля, то широтноМОДУЛНРОВЗННЫЗ ИМШУЛЬСЫ ПОЯВЛЯЮТСЯ на выходе двенадцатого элемента И 9 д. Во время пауз между широтно-модулированнми импульсами с целью обеспеЧЕНИЯ НЕПРЕРЫВНОСТИ ПРОТЭКЗННЯ ЯКОР ного тока исполнительного двигателя 6 формруются импульсы на выходах третьего 86 и четвертого 87 элементов И-НЕ в соответствии с диаграммой(фиг. 17). Высокому уровню сигналов соответствует замкнутое состояние первого 97, второго 98, третьего 99 и и четвертого 100 ключей усилителя 5 мощности (фиг. 17). Изменение состояния указанных ключей друг относительно друга происходит с временнЫми задержками в соответствии с фиг. 16,что исключает протекание сквознх токов и повышает надежность работы усилителя 5 мощности.Смена знака кода управления(фиг. 16)показана в момент времени Т. При этом в момент времен Т 1 изменяется состояние девятого триггера 84, а в момент Та появляется широтномодулированный импульс. Временные задержки 3 ТТ, Т 2 и 132 ГЕЙ, Тэ исключают протекание сквозных токовпри ИЗМЕНЕНИИ знака ХСОДВ. управления.Исполнительий двигатель 6 и механически связанный с ним инкременталь 5 1357917 ный датчик 7 вращаются со скоростью,среднее значение которой пропорционально длительности шнротно-модулированных импульсов.а направление ЗЗДБЕТСЯ ЗННКОВЬТМ РНЗРЯДОМ КОД УПравления При этом на одном на выходов (например, на первом)-формирователн 8 ньшульсов появляются позиционные импульсы (фиг. 7 В. Каждьт позиционный импульс изменяет на единицу содержимое третьего счетчика 37 датчика 13 приращения позиции(фиг. 7 С). Первый дешифратор 1 дформпрует на первом выходе разрешающий сигнал,-а на втором выходе - импульсной сигнал (фиг. 7 П), если текущий код на выходе третьего счетчика 37 равен Ы, 2, п 0,1,2, .на второй вход сдвигающего блока 12(фиг. 10), обеспечивает коммутацию каждого 1-го разрядного кода на его первом входе соответствующим пг разрядным входом шестого регистра дд,причем Ш 1 3 1, где 3 п 1.Одновременно в преобразователе 10 частота - код происходит формирование кода интервала. Тактирующий сигнал на его пятом входе в момент времени ШТ (фиг. 7 А) переписывает код из первого счетчика 31 во второй счетчик 32 (фиг. 7). Этот код равен числу имульсов, поступивших с пятого выхода блока 9 синхронизации за время между приходом последнего позиционного имульса В предыдущем Цйклет И первого позиционного нмульса в текущем цикле работы систем. Далее вовтором счетчике 32 происходит Накоп пение импульсов, поступающих с шестого выхода блока 9 синхронизации. При наличии разрешающего уровня на втором входе первого элемента И-36 позиционные импульсы с выхода первого элемента ИЛИ 35 переписывают текущий код второго.счетчика 32 в четвертый регистр 33 В результатев последнем накапливается код интервала М 3 между числом позиционных импульсов Ы 5 при п 2 (фиг. 7 К). Код интервала Ш Мд поступает на вход(адресный) блока 11 памяти, на выходе которого появляется код, равны Ш 3 К/Мд.С появлением очередного тактирующего сигнала с пятого выхода блока 9 синхронизации в датчике 13 прираще 45Нил позиции формируется код приращення позиции за текущий цикл работы системы. С появлением тактирушщих сигналов на четвертом и восьмом выходах блока 9 синхронизации начинаетСд РНСЧЕТ ОЧЕРЕДНОГО кода заданнойскорости на первом выходе первого регулирующего блока 2, а также формирование кода действительной скорости на выходе сдвигающего блока 12. Так как код ИЗ В данном случае соответствует измеренному интервалу между числом импульсов Ы 1 5, то в сдвнгающем блоке 12 для 3 3 обеспечивается двойной сдвиг в сторону старшх разрядов кода Ы, и код действительной скорости на его выходе становится равным.Ы 3 4. Далее во втором регулирующем блоке3 формируется код управления и работа системы происходит аналогично указ анному . Если после прихода каждого импуль са на третий вход блока 17 контроля тока (фиг. 13) выход седьмого триггера 74 устанавливается в состояние логического нуля, то на выходе четвер того элемента 75 задержки сохраняется уровень логической единицы н запускается одновнбратор 76. Если данное состояние на выходе четвертого элемента 75 задержки сохраняется в течение 0,5 с, то сигнал с второго выхода блока 17 контролятока сбрасывает код управления во втором регистре 28 второго регулирующего блока ЗД Нулевой код на выходе второго регистра 28 г СОХРЗНЯЕТСЯ ДО перезапуска СИСТЕМЫ Н появления сигнала начальной установки на входе сброса восьмого триггера 78 (фиг. 13). Это обеспечивает защиТУ СИСТЕМЫ ОТ аваршйных режимов. Повышение точности работы цифровой системы управления достигается за счет повышеня точности измерения скорости и реализации законов регулирования, обеспечивающих уменьшение ошибки по позиции и скорости. Повышение надежности достигается за счет исклшчения сквозных токов В усилителе 5 мощности, а также за счет предотвращения аварийных реЖИМОВ.Ф о р м.у л а и 3 о б р е т е н и я 1. Цифровая система управления, содержащая-эадатчик, подключенный выходами к первым входам первого регу 7 13579 пирующего блока, соединенного первымм выходами с первым входам второго регулирующего блока, выходы которого подключены к первы входам бло ка комутации ключей, второй вход ко- 5 торого соединен с первым выходом бло- ка синхронизации, а первый выход - с входом усилителя мощности, соеди-.н ненного первым выходом через испол- 16нтельнй двигатель с входом инкре ментального датчика, вторьш выходомс третьим входом блока комутацииключей, второй выод которого подключеи к второму входу второго регулиру-15инкрементального датчика соединены с одноименным входам формирователя импульсов, третий вход которого подключен к второму выходу блока синхро-20 низации, соединенного третьим и четвертым выходами соответственно с третьими входами второго и первого регулирующих блоков, о т п и ч а ю щ а я с я 3 тем, что, с целью повышения точности и надежности снстеы,в нее введены преобразователь частота - код, блок памяти, сдвигающий блок, дешифратор н датчик приращения позиции, первьй и второй входы преоб 30 разователя частота - код и датчика приращения позиции соединены с соответствующими выходами формирователя импульсов, третий вход датчика приращения позици подключен к пятомувы 25ходу блока синхронизации.а первый, 35 второйн третий выходы соответственно н первым входам дешфратора вторым входам первого регулирующего блока и второму входу дешифратора. 4 ОСОЕДИНЕННОГО ПЕРВЫМ ВЫХОДОМ С ТРЭТЪИМ входом преобразователя частота - код,четвертьй н пятый входы которого подключен соответственнок шестому и седьмому выходам блока синхронизации, 45 а выходы через блок памяти к первым входамсдвигающего блока, соединенноговторым и третьим входами со. ОТЗТСТВВННО С ВТОРМ ЕЫЕОДОМ дЕЩИф ратора и восьмы выодом блока синХРОНИЗЗЦИН, 8 ВЫМОДЗМИ С ВТОРЫВХОДНЫЕ ВТОРОГО РВГУПНРУЮЩВГО блока.7 8 7 2. Цифровая система по п. 1, о тли ч а ю Щ а я с я тем, чтопреобразователь частота - код содержит первьй и второй счетчики, регистр,триггер, элемент ИЛИ и элемент И,первый вход преобразователя частотакод соединен с Бвходом триггера и первым входом элемента ИЛ, а второй вход с В-входом триггера и вторым входом элемента ИЛ, подключенного выходом к входу сброса первого счетчика и первому входу элемента И,БТОВОН ВХОД КОТОБОГО СОЕДИНЕН С третьим входом преобразователя частота код, а выод с входом записи регистра суммрующие входы первого и второго счетчиков подключен к четвертотму входу преобразователя частота код, пятый вход которого соединен с входом записи второго счетчика, подключенного информационнымм входами кИНФОРМЗЦИОННЫМ выходам первого счетПервым Информационным входам регистра, второй информационный вход которого соединен с выходом триггера, а информационные выходы - с выходами преобразоватепячастота - код.3 Цифровая система по п. 1,ь о т л и ч а ю щ а я с я тем, что,блок коммутации ключей содержит блокзащиты ключей, блок контроля тока и преобразователь код ширина импульСа Первые и второй входы которого соединены с-соответствующими входами блока К 0 МУтации ключей, а первый, второй и трети выходы с соответствующими входам блока защиты ключей, подкпюченногочетвертым входом к первому выходу блока контроля тока,а-первым, вторым и третьим входами которого соединенного соответственно с шиной. уставки тока, третьим вхо. дом блока коммутации ключей и четвер тым выходом преобразователя код шм-, рина импульса,выход блока защиты ключей и второй вышодблока контррля тока подключены соответственно к первому и второму выходам блоха комутации ключей.
МПК / Метки
МПК: G05B 19/18
Метки: управления, система, цифровая
Код ссылки
<a href="https://by.patents.su/11-162-cifrovaya-sistema-upravleniya.html" rel="bookmark" title="База патентов Беларуси">Цифровая система управления</a>
Цифровая следящая система управления
Номер патента: 29
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G05B 15/02
Метки: цифровая, управления, система, следящая
Текст:
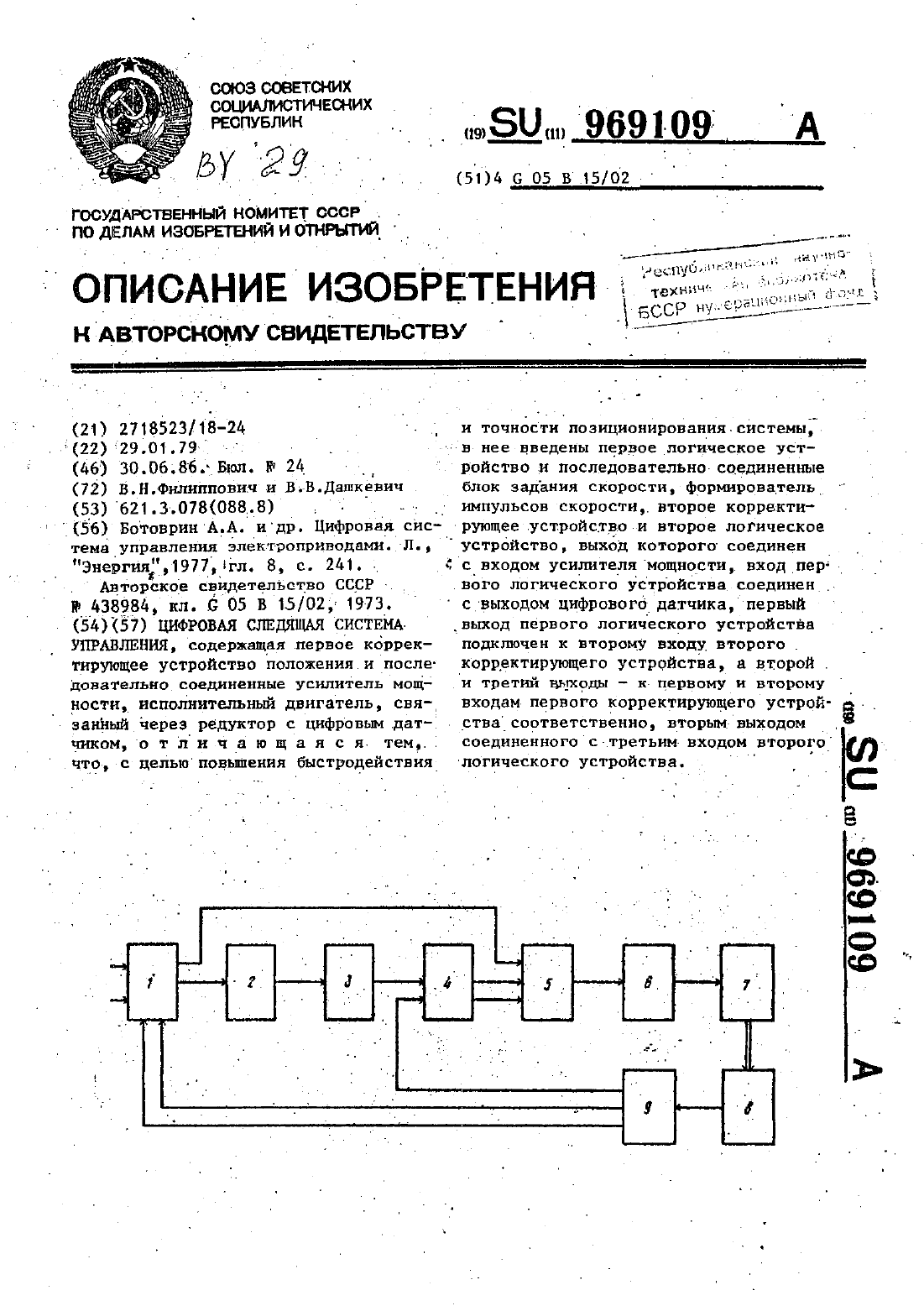
...0 Устройства,И Третий выходы к первому и второму входам первого корректирующего УСТРФЙСТВН соответственно, втдрм-выходом соединенного с третьим входом,второго логического устройства.Такое решение позволит повысить 5 ЫСТрОдЕйствие-и точность позиционирования системы.На чертеже-изображена блоксхема предлагаемой цифровой следящей систет мы управления.Система состоит из последовательно соединенньш первого корректируюЩегоустройства 1,...
Система автоматического управления
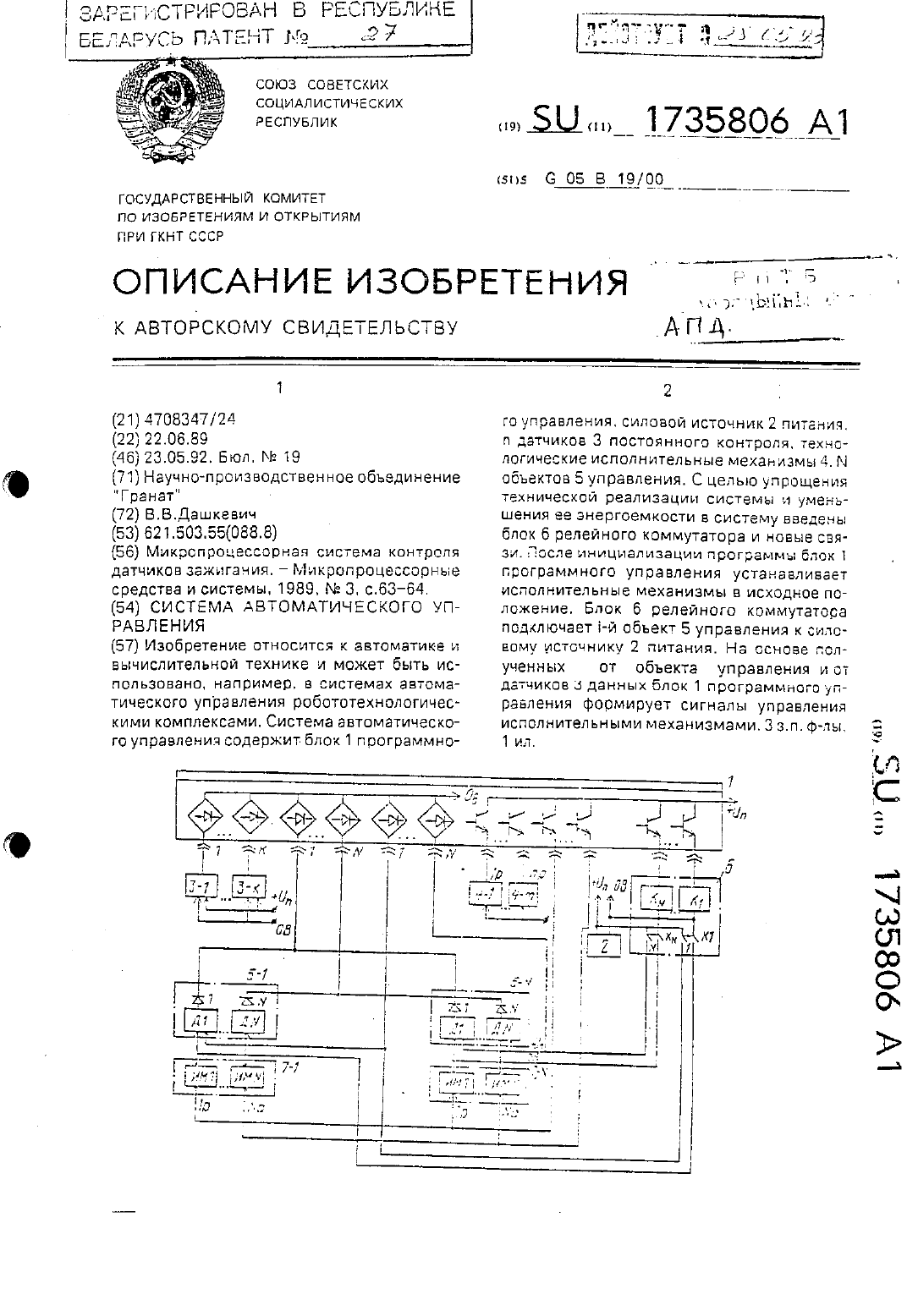
Номер патента: 27
Опубликовано: 30.05.1994
Автор: Дашкевич Валерий Викторович
МПК: G05B 19/00
Метки: система, управления, автоматического
Текст:
...программного управления. силовой источник 2 питания. датчики 3 постоянного контроля. технологические исПОЛНИТВЛЬНЫЕ МЭХЭНИЗМЫ 4, М групп датчиков 5 состояния. блок 6 релейной коммутации. М групп исполнительных механизмов 7.Блок 1 программного управления предНазначен для цихлового управления технологическим оборудованием. В качестве блока 1 программного управления. например, могут быть использованы системы управления промышленным роботом или...
Устройство для автоматического управления электроприводом автономного транспортного средства
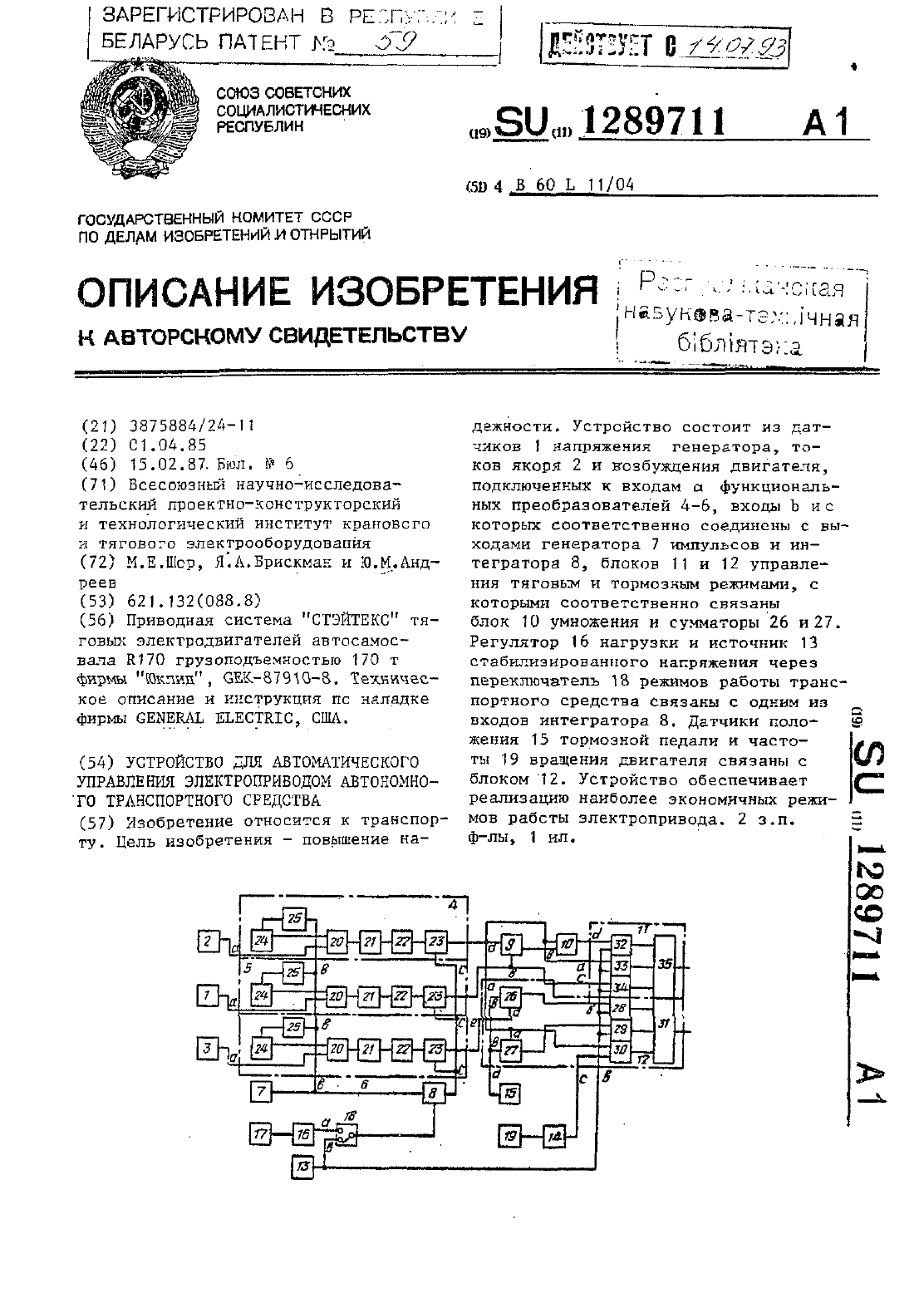
Номер патента: 59
Опубликовано: 30.09.1994
Авторы: Шор М. Е., Андреев Ю. М., Брискман Я. А.
МПК: B60L 11/04
Метки: автономного, управления, устройство, средства, транспортного, автоматического, электроприводом
Текст:
...16 нагрузки преобразует период частоты вращения теплового двигателя в напряжение ПСигнал напряжения, пропорционапьный периоду частоты Ед алгебраически суммируется с постоянным иапряжением которое-корректирует зависимость мощности злектроцвигателя Р от частоты ЕдДВеличина текущего значения вынодного напряжения интегратора 8 пропорциональна величине входного напряжения Сы При этом сигнал навыходе блока 23-памяти пропорционален величине...
Устройство для автоматического управления электроприводом автономного транспортного средства
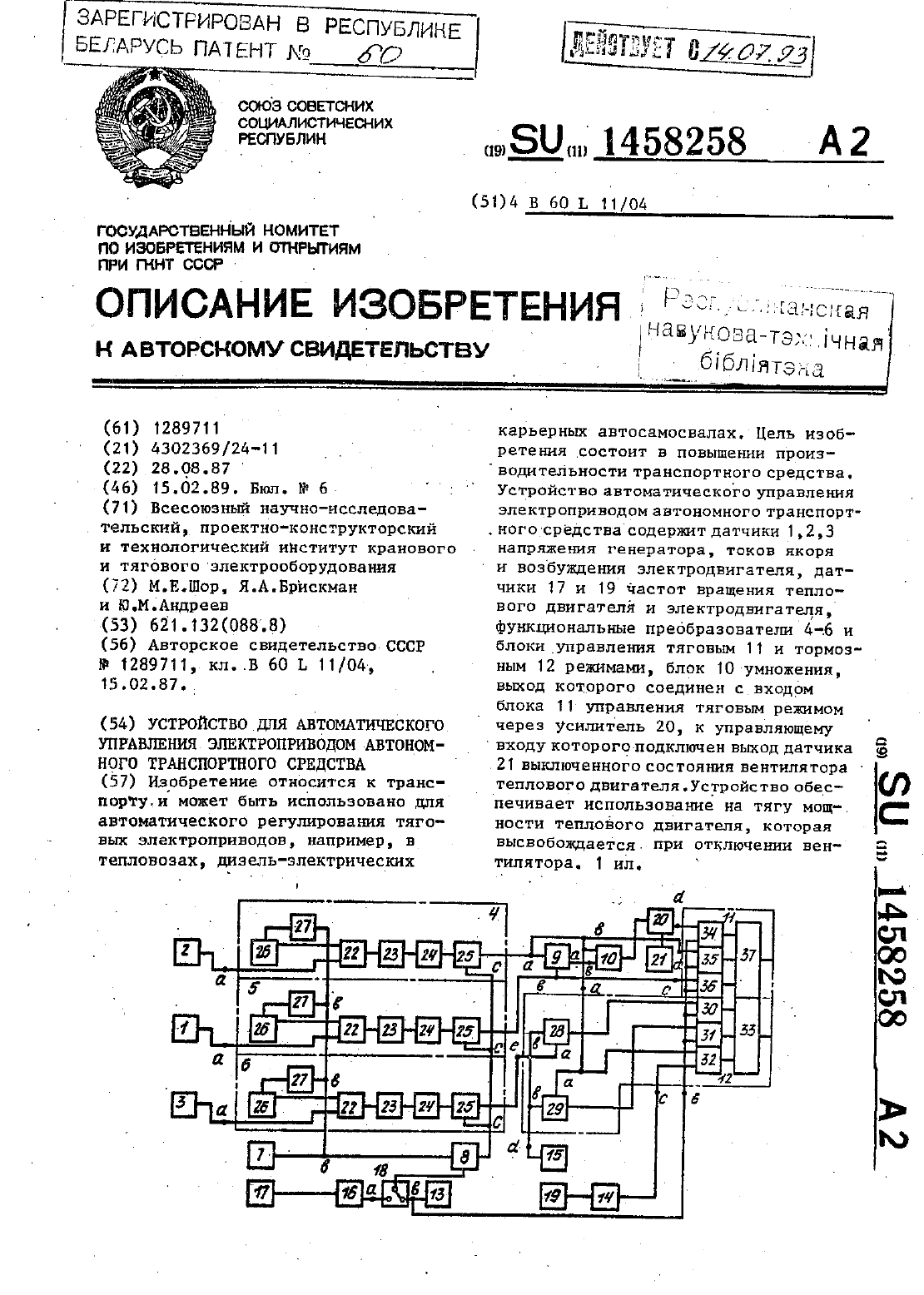
Номер патента: 60
Опубликовано: 30.09.1994
Авторы: Андреев Ю. М., Брискман Я. А., Шор М. Е.
МПК: B60L 11/04
Метки: устройство, электроприводом, автономного, транспортного, управления, автоматического, средства
Текст:
...времени напряжения на выходе-интегра- равномн соседними имулвсами на вьшоде пр К 4 51 КБ-г 1 екомпаратора 22 пропорционален значе Где р павнию измеряемого напряжения Н. Формирователь 23 по переднему фронту нмпульсов компаратора 22 формирует 15где К 4 К 1 К 1 кк,. ч 7 Ед - регулируемый-коэффициент, учитывающй джоулевые поте 7 и 1щееся на выходе интегратора 8 В этот 2 П датиик 21 состояня вентилятора теплового двигателя-формирует логичес...
Устройство для выявления сердечной аритмии
Номер патента: 161
Опубликовано: 30.09.1994
Авторы: Лопато Г. П., Сидоренко Г. И., Усачев О. И., Якубович В. М., Никитин Я. Г.
МПК: A61B 5/04
Метки: выявления, сердечной, аритмии, устройство
Текст:
...приход меренги, хранящиеся в одной груш-хе реги- первого установленноговрачом знака,стров, с контрольными параметрами, на- счетчик СТ-1 фиксирующтш приход перходпшимися в другой группе регистров. 5 вого установленного врачом знака. СчетВ зависимости от длительности предыду- чик СТ 1- устснавливается в исходное. шего н последующего интервалов ЦК состояние О потенциалом Вт-числ в(фиг. 2,4, 5 и 6) блоком 4 выполняется ношу (фиднэ). По...
Предыдущий патент: Велоэргометр
Следующий патент: Способ получения а-интерферона человека
Случайный патент: Передвижной скребковый перегружатель