Интегрированная инерциально-спутниковая навигационная система с использованием многогипотезной фильтрации
Номер патента: U 7385
Опубликовано: 30.06.2011
Авторы: Шабан Сергей Александрович, Мороз Андрей Николаевич, Солонар Андрей Сергеевич, Сидорович Олег Викторович


Текст
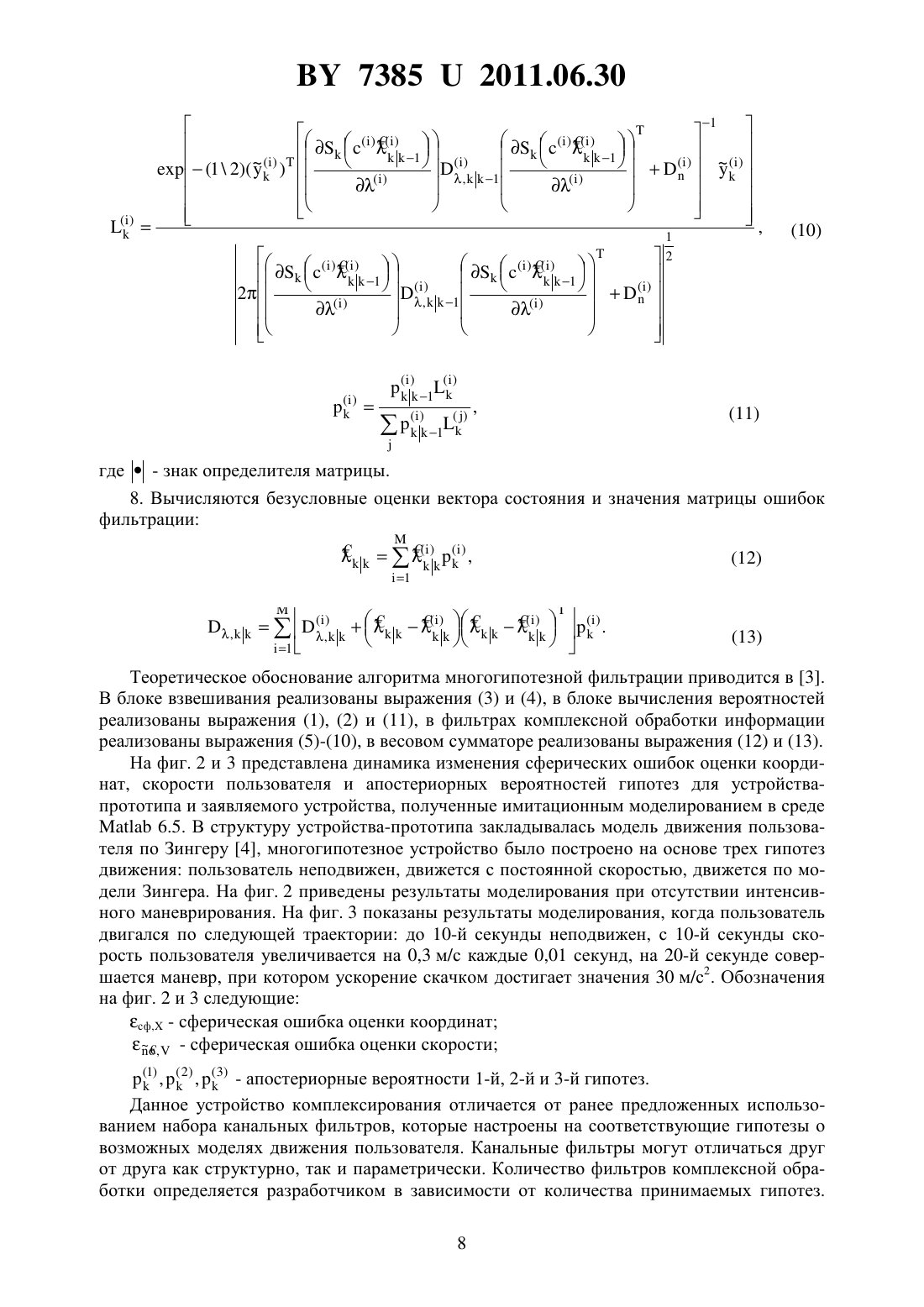
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Военная академия Республики Беларусь(72) Авторы Шабан Сергей Александрович Солонар Андрей Сергеевич Мороз Андрей Николаевич Сидорович Олег Викторович(73) Патентообладатель Учреждение образования Военная академия Республики Беларусь(57) Интегрированная инерциально-спутниковая навигационная система с использованием многогипотезной фильтрации, содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и 73852011.06.30 измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, отличающаяся тем,что в нее дополнительно введены блок взвешивания, блок вычисления вероятностей, весовой сумматор и три комплексных фильтра, выходы с первого по шестой блока взвешивания соединены с двумя первыми входами каждого комплексного фильтра, входы с первого по шестой блока взвешивания соединены с одноименными входами весового сумматора, а также вторым и третьим выходами трех комплексных фильтров, входы с седьмого по девятый блока взвешивания соединены с первой группой выходов блока вычисления вероятностей, вторая группа выходов которого соединена с седьмого по девятый входами весового сумматора, первый выход каждого комплексного фильтра соединен с одним из трех входов блока вычисления вероятностей, вторая группа входов вычислителя начальных данных соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый весового сумматора, а третья группа из трех входов соединена с первыми тремя выходами блока вычисления местоположения пользователя, шесть выходов блока вычисления местоположения пользователя связаны с седьмыми входами комплексных фильтров, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с шестыми входами комплексных фильтров и с входами с седьмого по двенадцатый вычислителя навигационных параметров, а выходы с первого по третий непосредственно связаны с пятыми входами комплексных фильтров, вход три которых соединен с тремя первыми входами вычислителя навигационных параметров, девять выходов которого соединены с выходами системы непосредственно, и подключен к трем выходам корректора угловой скорости,четвертый вход комплексных фильтров соединен с тремя вторыми входами вычислителя навигационных параметров и подключен к трем выходам корректора кажущегося ускорения, а восьмой вход связан с выходом таймера, при этом выходы весового сумматора с первого по третий соединены со второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по двенадцатый соединены с выходами системы непосредственно.(56) 1. Патент Российской Федерации 2087867, МПК 01 С 23/00, 1993. 2. Патент Российской Федерации 2277696, МПК 01 23/00 (2006.01),01 5/14 Полезная модель относится к устройствам навигационной техники и может быть использована при проектировании комплексированных инерциально-спутниковых навигационных систем различных подвижных объектов. 73852011.06.30 Известна система 1, которая содержит радиоприемник, соединенный через усилитель с антенной, а выходами подключенный к вычислителю местоположения навигационных спутников, подключенному другими входами к блоку начальной установки альманаха данных об орбитах спутников, а выходы этого вычислителя соединены с входами блока выделения радиовидимых спутников. Выходы этого блока подключены к входам блока выделения рабочего созвездия спутников, соединенного выходами с входами блока вычислителя местоположения потребителя. В систему входят измеритель проекций абсолютной угловой скорости, состоящий из трех ортогонально установленных лазерных гироскопов, измеритель проекций кажущегося ускорения, включающий три акселерометра, установленных по соответствующим осям лазерных гироскопов. Указанные измерители через блоки коррекции подключены к вычислителю навигационных параметров,выходы которого связаны через третий блок коррекции с выходами системы и с выходами дисплея, при этом часть выходов системы подключена к входам блока выделения радиовидимых спутников, а часть выходов вычислителя навигационных параметров подключена к первой группе входов анализатора достоверности информации, другая группа входов которого соединена с выходами блока вычисления местоположения потребителя. Выходы анализатора через блок ключей связаны с входами навигационного фильтра, первая группа выходов которого соединена соответственно с входами двух блоков коррекции, а вторая группа выходов подключена к входам третьего блока коррекции. Эта система довольно точно решает задачу навигации, но при этом требует ввода начальных данных о широте, долготе, высоте местоположения подвижного объекта, а также ориентации относительно меридиана - азимуте, а также не обеспечивает формирование выходных сигналов, пропорциональных параметрам движения, полученным на основе только инерциальной навигации. Наиболее близкой к предлагаемой системе по технической сущности является система 2, которая содержит многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников,таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров,блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с группой входов из шести вычислителя навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, а выходы с первого по третий непосредственно связаны с входами с 3 73852011.06.30 седьмогопо девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников,выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по девятнадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно. Данная система обладает автономностью по сравнению с системой 1, что позволяет довольно точно решать задачу навигации на основе только инерциальных измерений. Указанная система имеет расширенный состав выходных сигналов по сравнению с системой 1, что позволяет использовать ее в пилотажно-навигационных комплексах летательных аппаратов. Недостатком существующей системы является значительный рост ошибок в условиях интенсивного маневрирования потребителя, которые в определенных условиях могут превысить ширину дискриминационной характеристики и привести к срыву сопровождения. Задачей настоящей полезной модели является повышение устойчивости работы инерциально-спутниковой навигационной системы. Техническим результатом осуществления полезной модели является повышение устойчивости работы в условиях интенсивного маневрирования потребителя. Для решения поставленной задачи предложена интегрированная инерциальноспутниковая навигационная система с использованием многогипотезной фильтрации, содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, в которую дополнительно введены блок взвешивания,блок вычисления вероятностей, весовой сумматор и три комплексных фильтра, выходы с первого по шестой блока взвешивания соединены с двумя первыми входами каждого комплексного фильтра, входы с первого по шестой блока взвешивания соединены с одноименными входами весового сумматора, а также вторым и третьим выходами трех комплексных фильтров, входы с седьмого по девятый блока взвешивания соединены с первой группой выходов блока вычисления вероятностей, вторая группа выходов которого соединена с седьмого по девятый входами весового сумматора, первый выход каждого комплексного фильтра соединен с одним из трех входов блока вычисления вероятностей,вторая группа входов вычислителя начальных данных соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый весового сумматора, а третья группа из трех входов соединена с первыми тремя 4 73852011.06.30 выходами блока вычисления местоположения пользователя, шесть выходов блока вычисления местоположения пользователя связаны с седьмыми входами комплексных фильтров, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с шестыми входами комплексных фильтров и с входами с седьмого по двенадцатый вычислителя навигационных параметров, а выходы с первого по третий непосредственно связаны с пятыми входами комплексных фильтров, вход три которых соединен с тремя первыми входами вычислителя навигационных параметров, девять выходов которого соединены с выходами системы непосредственно, и подключен к трем выходам корректора угловой скорости, четвертый вход комплексных фильтров соединен с тремя вторыми входами вычислителя навигационных параметров и подключен к трем выходам корректора кажущегося ускорения, а восьмой вход связан с выходом таймера, при этом выходы весового сумматора с первого по третий соединены со второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по двенадцатый соединены с выходами системы непосредственно. На фиг. 1 приведена блок-схема предлагаемой системы. В соответствии с фиг. 1 система содержит 1 - многоканальный радиоприемник (РП) 2 - усилитель (УС) 3 - антенна 4 - вычислитель местоположения спутников (ВМС) 5 - блок начальной установки альманаха данных о спутниках (БНУАДС) 6 - таймер 7 - блок выделения радиовидимых спутников (БВРВС) 8 - блок выбора рабочего созвездия спутников (БВРСС) 9 - блок вычисления местоположения пользователя (БВМП) 10 - вычислитель начальных данных (ВНД) 11 - измеритель проекций абсолютной угловой скорости (ИПАУС) 12 - измеритель проекций вектора кажущегося ускорения (ИПВКУ) 13 - корректор угловой скорости (КУС) 14 - корректор кажущегося ускорения (ККУ) 15 - вычислитель навигационных параметров (ВНП) 16 - блок взвешивания (БВ) 17 - блок вычисления вероятностей (БВВ) 18 - весовой сумматор (ВС) 19, 20, 21 - первый, второй и третий комплексные фильтры (КФ 1, КФ 2, КФ 3). Согласно прототипу, в качестве измерителей трех проекций абсолютной угловой скорости и кажущегося ускорения могут быть использованы, например, три одноосных лазерных гироскопа и три акселерометра, оси которых образуют единую ортогональную систему координат, связанную с носителем системы. Все блоки системы за исключением БВ, БВВ, ВС, КФ 1, КФ 2 и КФ 3 реализуют алгоритмы прототипа. Данные блоки реализуются с помощью алгоритмов, представленных ниже. Предлагаемая интегрированная инерциально-спутниковая навигационная система с использованием многогипотезной фильтрации работает следующим образом. Исходной информацией являются сигналы с трех связанных с корпусом пользователя и установленных ортогонально друг другу гироскопов и акселерометров, входящих в состав измерителей проекций абсолютной угловой скорости и вектора кажущегося ускорения соответственно. 73852011.06.30 Сигналы с гироскопов и акселерометров поступают в вычислитель начальных данных и через корректоры угловой скорости и кажущегося ускорения на вход трех комплексных фильтров, а также в вычислитель навигационных параметров. В вычислитель начальных данных поступают также сигналы, пропорциональные широте, высоте и долготе пользователя из блока вычисления местоположения пользователя,а также сигналы ошибок измерений проекций абсолютной угловой скорости из весового сумматора для их запоминания в энергонезависимой памяти блока. В начальный момент времени эти сигналы отсутствуют. В ВНД осуществляется подготовка начальных данных для комплексных фильтров и ВНП по алгоритму аналогичному 2. В КУС осуществляется учет ошибок измерений угловой скорости вращения путем суммирования сигналов, пришедших с ИПВКУ, с сигналами, пропорциональными ошибкам гироскопов, оцениваемым в комплексных фильтрах. В ККУ осуществляется учет ошибок измерений кажущегося ускорения путем суммирования сигналов, пришедших с ИПВКУ, с сигналами, пропорциональными ошибкам акселерометров, оцениваемым в комплексных фильтрах. В ВНП по сигналам, поступающим из корректоров угловой скорости и кажущегося ускорения, с учетом начальных данных, поступивших из ВНД, осуществляется оперативное вычисление навигационных параметров углов ориентации относительно географического меридианаи плоскости местного горизонта ,северной , вертикальнойи восточнойсоставляющих относительной скорости поступательного движения, а также географических координат , , ,. Указанные параметры выдаются во внешние системы. Порядок вычисления выходных сигналов ВНД аналогичен 2. Принимаемые антенной сигналы от навигационных спутников через усилитель поступают на многоканальный радиоприемник, который после их обработки выдает информацию о спутниках в вычислитель местоположения спутников. ВМС по данным об орбитах спутников, выдаваемым блоком БНУАДС информации из радиоприемника и по сигналу таймера, вычисляет местоположение спутников, из совокупности которых затем будет выбрана группа, обеспечивая наилучшую точность навигационного решения. Это осуществляется в блоке выбора рабочего созвездия спутников, на входы которого,помимо спутниковой информации из БВРВС, поступают сигналы, пропорциональные географическим координатам пользователя из весового сумматора, полученным на основе инерциальных данных и соответствующим их результирующей оценке на выходе весового сумматора. С учетом этих сигналов в БВРСС осуществляется рациональный выбор рабочего созвездия спутников при количестве радиовидимых спутников, большем четырех,повышающий достоверность и точность последующих навигационных решений. Далее информация о спутниках, включенных в рабочее созвездие, поступает в блок вычисления местоположения пользователя, в котором вырабатываются сигналы, пропорциональные географическим координатам пользователя и его скорости. Все указанные сигналы поступают в комплексные фильтры для коррекции навигационных параметров. Кроме того, значения широты, высоты и долготы поступают в ВНД для начальной выставки при включении системы. Комплексирование инерциальной и спутниковой информации осуществляется в фильтрах комплексной обработки, блоке взвешивания, блоке вычисления вероятностей и весовом сумматоре. На вход комплексных фильтров поступают сигналы скорректированной угловой скорости вращения из КУС, скорректированного кажущегося ускорения из ККУ,а также сигналы из блока БВМП о местоположении и скорости пользователя и сигнал секундной метки от таймера для синхронизации инерциальной и спутниковой информации. После включения системы в комплексные фильтры одноразово поступают также сигналы из ВНД о местоположении 0, 0, 0, ориентации 0, 0, 0 пользователя и ошибках гиро 6 73852011.06.30 скопов 0, 0, 0. Выходные сигналы формируются в соответствии со следующим алгоритмом многогипотезной фильтрации 1. Вычисляется априорная вероятность -й ( ,1,) гипотезы модели движения потребителя( )) где- априорные вероятности перехода( 1 - апостериорная вероятность -й гипотезы. 2. Определяются условные вероятности перехода 1 из -й модели движения потребителя в -ю с учетом апостериорных вероятностей гипотез (-1)-го шага измерения как 3. Определяются взвешенные значения апостериорных условных оценок 11 как сумма условных оценок (-1)-го шага фильтрации где- знак математического ожидания,а также условные взвешенные значения матрицы ошибок фильтрации 4. Определяются экстраполированные условные оценки и матрицы ошибок фильтрации( где 1(11 ,,) 1 - заданные для каждой из моделей входного воздействия условные динамические матрицы пересчета и корреляционные матрицы случайного маневра. 5. По результатам новых наблюденийопределяется неувязка измерений( )( ) ,где( ) . 6. Определяются условные результирующие оценки и ошибки фильтрации вектора состояния 7. Определяются коэффициенты правдоподобия для каждой гипотезы и апостериорные вероятности гипотез где- знак определителя матрицы. 8. Вычисляются безусловные оценки вектора состояния и значения матрицы ошибок фильтрации Теоретическое обоснование алгоритма многогипотезной фильтрации приводится в 3. В блоке взвешивания реализованы выражения (3) и (4), в блоке вычисления вероятностей реализованы выражения (1), (2) и (11), в фильтрах комплексной обработки информации реализованы выражения (5)-(10), в весовом сумматоре реализованы выражения (12) и (13). На фиг. 2 и 3 представлена динамика изменения сферических ошибок оценки координат, скорости пользователя и апостериорных вероятностей гипотез для устройствапрототипа и заявляемого устройства, полученные имитационным моделированием в среде 6.5. В структуру устройства-прототипа закладывалась модель движения пользователя по Зингеру 4, многогипотезное устройство было построено на основе трех гипотез движения пользователь неподвижен, движется с постоянной скоростью, движется по модели Зингера. На фиг. 2 приведены результаты моделирования при отсутствии интенсивного маневрирования. На фиг. 3 показаны результаты моделирования, когда пользователь двигался по следующей траектории до 10-й секунды неподвижен, с 10-й секунды скорость пользователя увеличивается на 0,3 м/с каждые 0,01 секунд, на 20-й секунде совершается маневр, при котором ускорение скачком достигает значения 30 м/с 2. Обозначения на фиг. 2 и 3 следующие сф, - сферическая ошибка оценки координат,- сферическая ошибка оценки скорости Данное устройство комплексирования отличается от ранее предложенных использованием набора канальных фильтров, которые настроены на соответствующие гипотезы о возможных моделях движения пользователя. Канальные фильтры могут отличаться друг от друга как структурно, так и параметрически. Количество фильтров комплексной обработки определяется разработчиком в зависимости от количества принимаемых гипотез. 73852011.06.30 Результирующая оценка формируется по результатам работы всех фильтров, которые беруться с различным весом. При соответствии априорных данных, заложенных в структуру комплексного фильтра,построенного на основе уравнений расширенной фильтрации Калмана, модели задающего воздействия, одноканальный измеритель будет давать более точную оценку по сравнению с многогипотезным измерителем, выигрыш составит порядка 10 при оценивании координат пользователя. Это объясняется влиянием ошибок, вносимых параллельными каналами многогипотезного измерителя, вес которых достаточно близок, но не равен нулю. Однако в процессе маневрирования пользователя структура одноканального комплексного измерителя становится неоптимальной. Большое структурное или параметрическое различие априорной информации и задающего воздействия неизбежно приводит к большим ошибкам навигационных определений. Таким образом, использование многогипотезной фильтрации для комплексирования инерциальной и спутниковой информации повышает точность и устойчивость навигационных определений системы в условиях маневрирования пользователя. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01C 23/00
Метки: многогипотезной, использованием, интегрированная, навигационная, система, инерциально-спутниковая, фильтрации
Код ссылки
<a href="https://by.patents.su/9-u7385-integrirovannaya-inercialno-sputnikovaya-navigacionnaya-sistema-s-ispolzovaniem-mnogogipoteznojj-filtracii.html" rel="bookmark" title="База патентов Беларуси">Интегрированная инерциально-спутниковая навигационная система с использованием многогипотезной фильтрации</a>
Спутниковая система связи
Номер патента: 287
Опубликовано: 30.12.1994
Автор: Петер Дондль
МПК: H04B 7/185
Метки: спутниковая, связи, система
Текст:
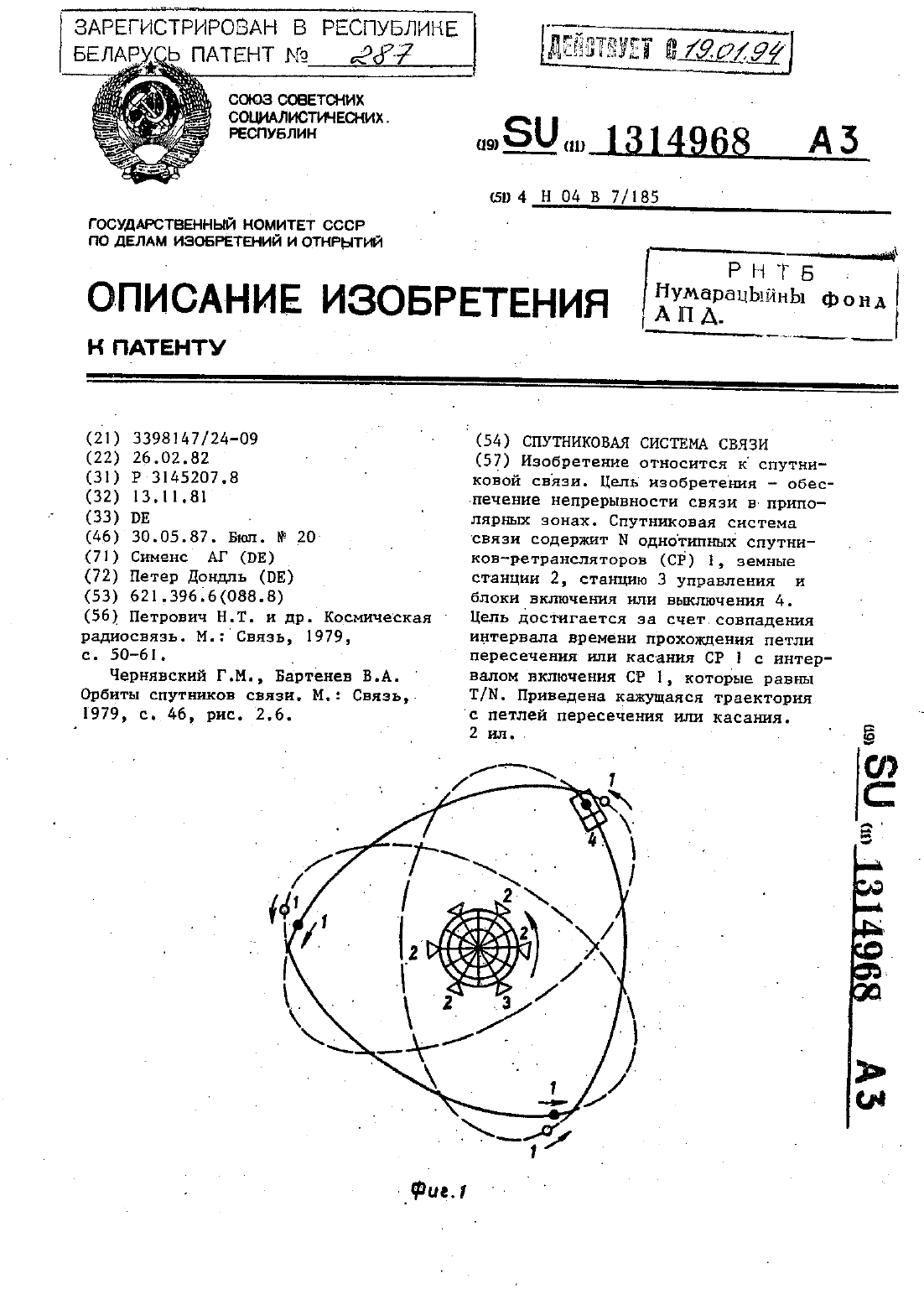
...касания установить на 10 восточной долготылии), то два других номинальных положения получаются сами собой.В северном полушарии одно 130 восточной долготы (над Манчжурией в Китае) и второе - 1100 западной долготы (над штатом Уайоминг, США). В этом примере исполнения неблагоприятная немецкая радиостанция связи будет во Фленсбурге где антенну придется двигать из направленя на Зенит до минимального угла меставремени, при сопровождении...
Система безналичной оплаты товаров и услуг с использованием мобильной связи
Номер патента: U 6756
Опубликовано: 30.10.2010
Автор: Курилович Борис Алексеевич
МПК: G06F 19/00, H04W 4/02, G06F 3/023...
Метки: мобильной, товаров, безналичной, оплаты, услуг, система, связи, использованием
Текст:
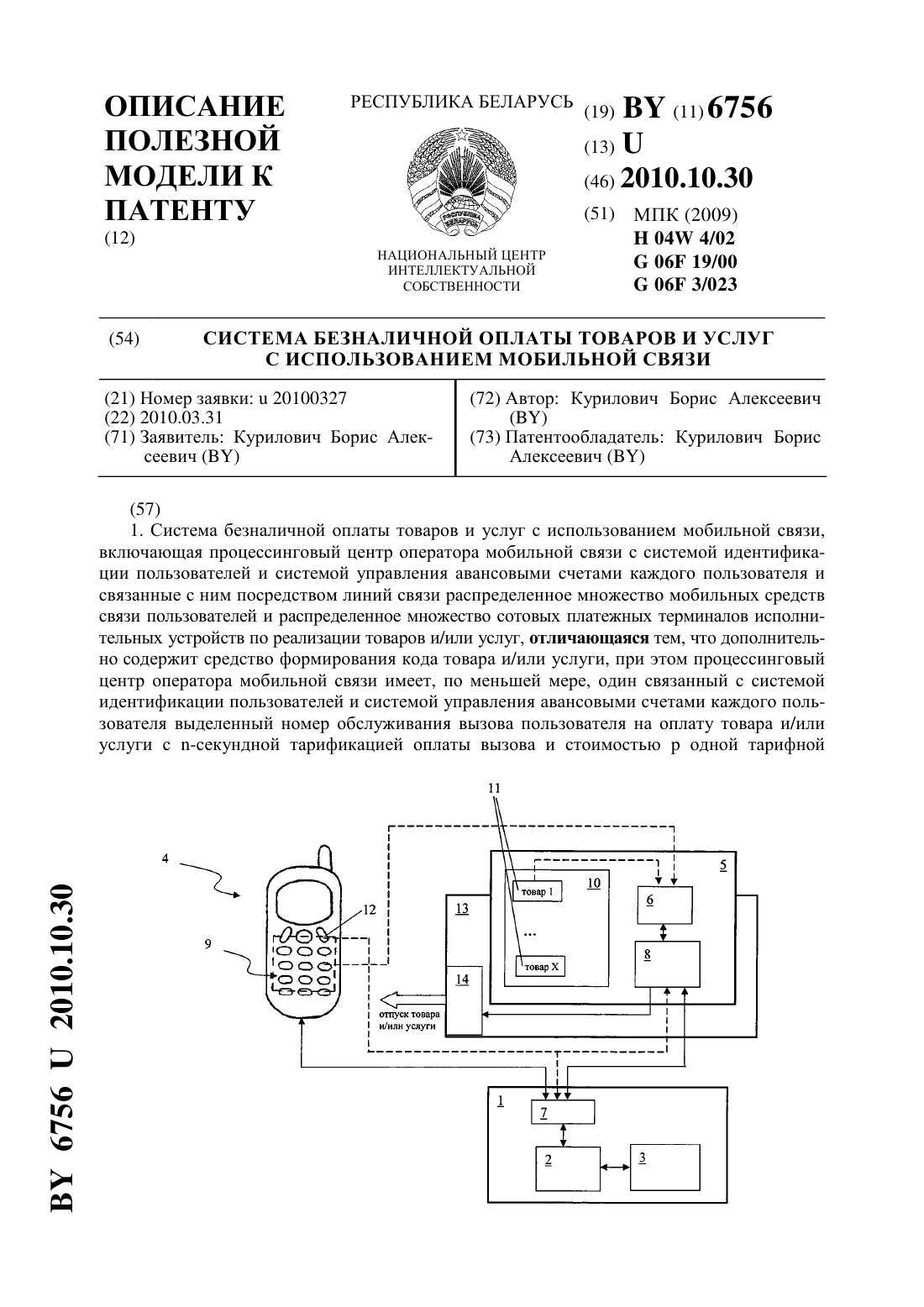
...с системой идентификации пользователей и системой управления авансовыми счетами каждого пользователя и связанные с ним посредством линий связи распределенное множество мобильных средств связи пользователей и распределенное 5 67562010.10.30 множество платежных терминалов исполнительных устройств по реализации товаров и/или услуг. Поставленная задача решается за счет того, что заявляемая система дополнительно содержит средство формирования...
Высокоскоростной декодер для коррекции модуля ошибок
Номер патента: U 4092
Опубликовано: 30.12.2007
Авторы: Фам Хак Хоан, Конопелько Валерий Константинович, Липницкий Валерий Антонович, Шкиленок Александр Владимирович
МПК: H03M 13/00
Метки: модуля, ошибок, декодер, коррекции, высокоскоростной
Текст:
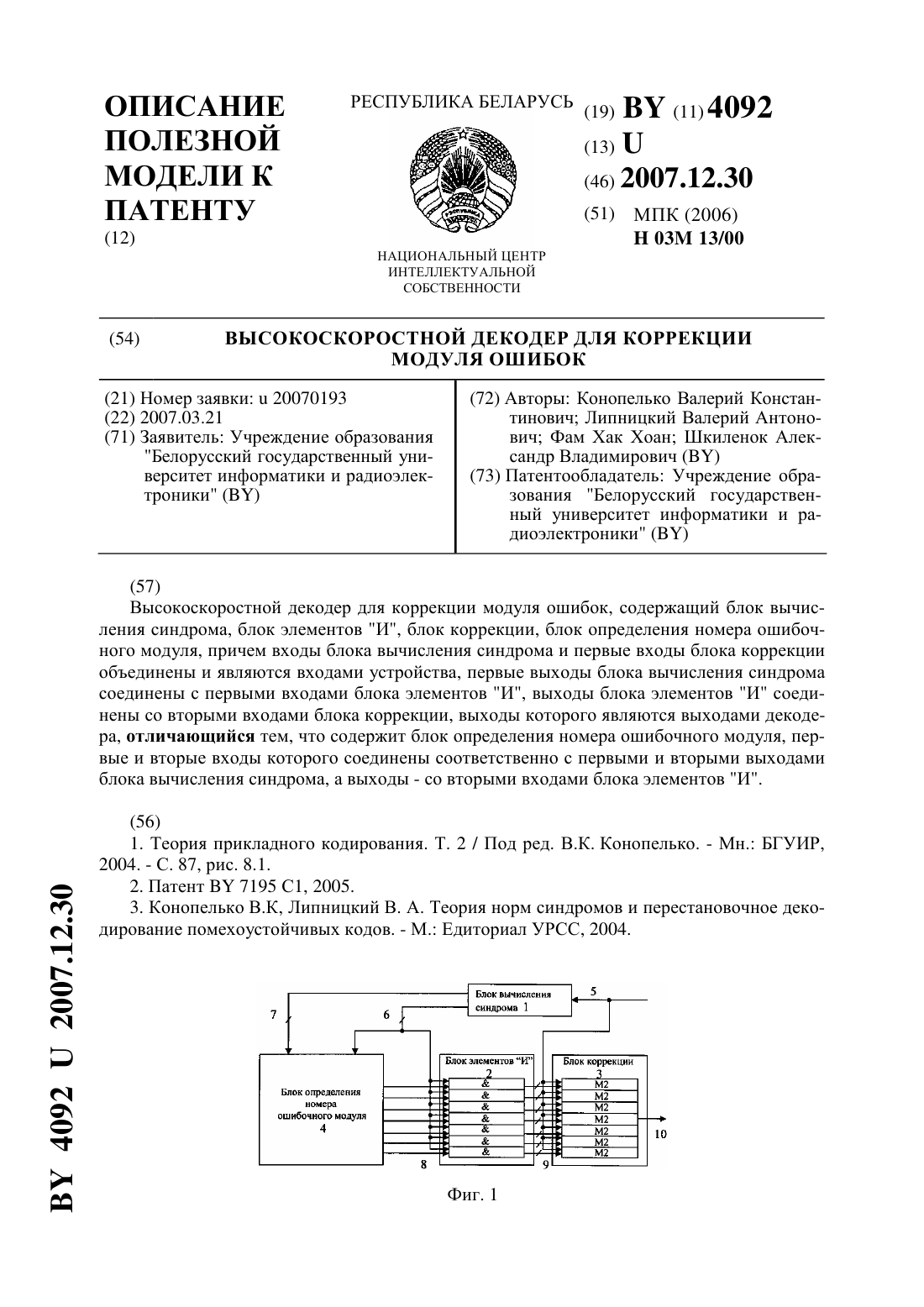
...которого являются выходами декодера, отличающийся тем, что содержит блок определения номера ошибочного модуля, первые и вторые входы которого соединены соответственно с первыми и вторыми выходами блока вычисления синдрома, а выходы - со вторыми входами блока элементов И. Сущность заявляемой полезной модели заключается в том, что предлагаемый декодер позволяет исправлять ошибки любой кратности в пределах модуля с малыми аппаратурными и...
Система подогрева и подачи дополнительного вязкого топлива в дизельный двигатель с использованием тепла отработавших газов

Номер патента: U 5287
Опубликовано: 30.06.2009
Авторы: Товстыка Виктор Станиславович, Гурков Геннадий Никитович, Карташевич Анатолий Николаевич
МПК: F02M 43/00
Метки: дополнительного, топлива, дизельный, использованием, двигатель, газов, подачи, подогрева, отработавших, вязкого, тепла, система
Текст:
...коллекторе дизеля, для подогрева дополнительного топлива до заданной температуры (например 120 С), регулируемый дроссель, датчик температуры с постоянно разомкнутыми контактами, сигнальную лампу. На фигуре представлена система подогрева и подачи дополнительного вязкого топлива в дизельный двигатель с использованием тепла отработавших газов. Система содержит контур подачи дизельного топлива, включающий бак дизельного топлива 1,...
Устройство декодирования для коррекции модуля ошибок
Номер патента: 7195
Опубликовано: 30.09.2005
Авторы: Конопелько Валерий Константинович, Земляков Алексей Леонидович, Липницкий Валерий Антонович
МПК: G11C 29/00
Метки: декодирования, коррекции, модуля, устройство, ошибок
Текст:
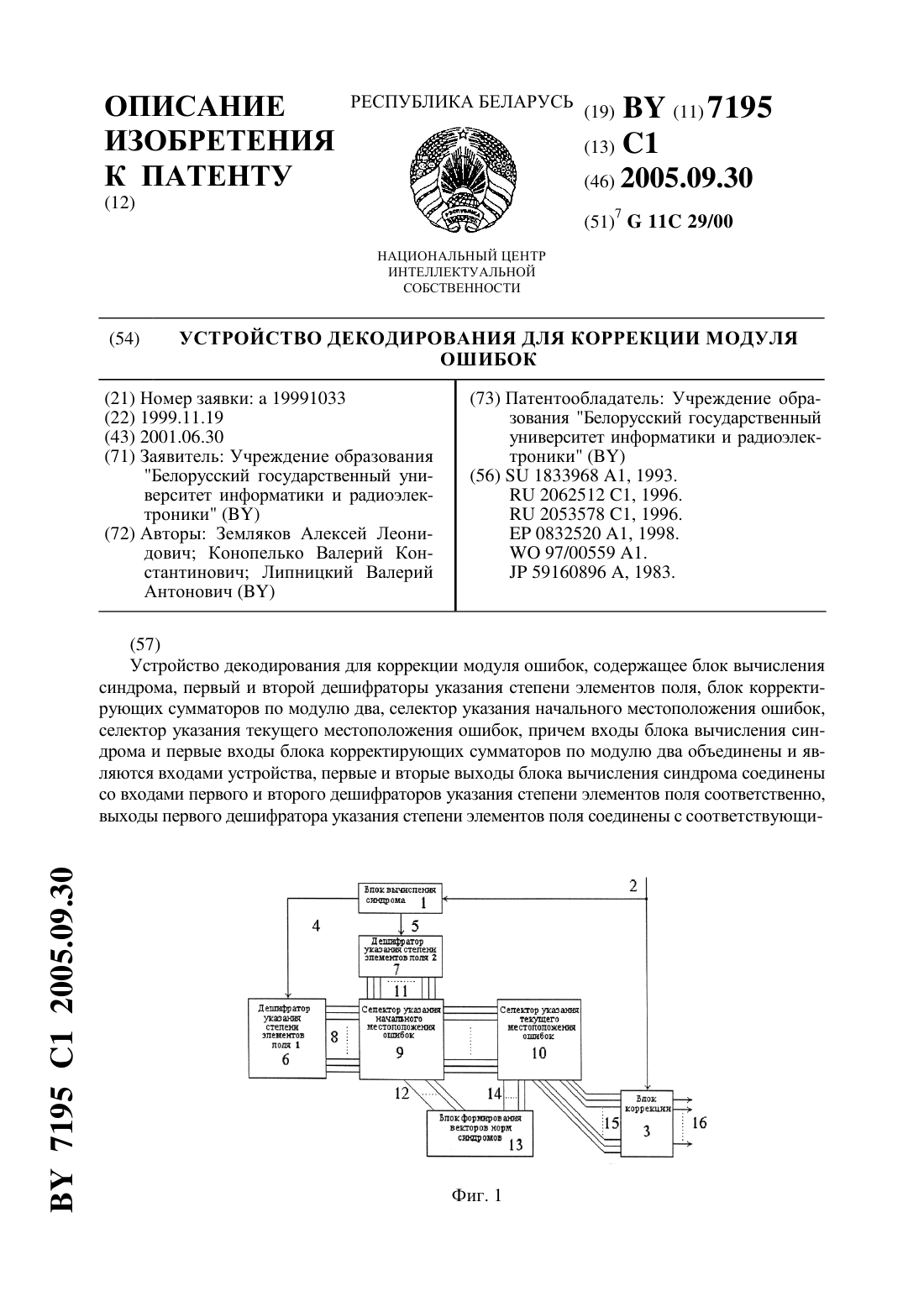
...соединены с выходами селектора указания начального местоположения ошибок, а выходы являются вторыми входами селектора указания текущего местоположения ошибок. Сущность данного изобретения заключается в том, что предлагаемое устройство корректирует ошибки любой кратности в пределах модуля с высоким быстродействием за счет применения специальной обработки кода Рида-Соломона, введения в устройство блока формирования векторов норм синдромов и...
Предыдущий патент: Устройство калибровки резервуаров
Следующий патент: Устройство для моделирования системы связи
Случайный патент: Пневмаэластическое устройство для обтурации наружных кишечных свищей