Устройство для быстродействующего самозапуска синхронной электродвигательной нагрузки
Номер патента: 9174
Опубликовано: 30.04.2007
Авторы: Баранов Алексей Геннадьевич, Курганов Владимир Васильевич, Крышнев Юрий Викторович
Текст
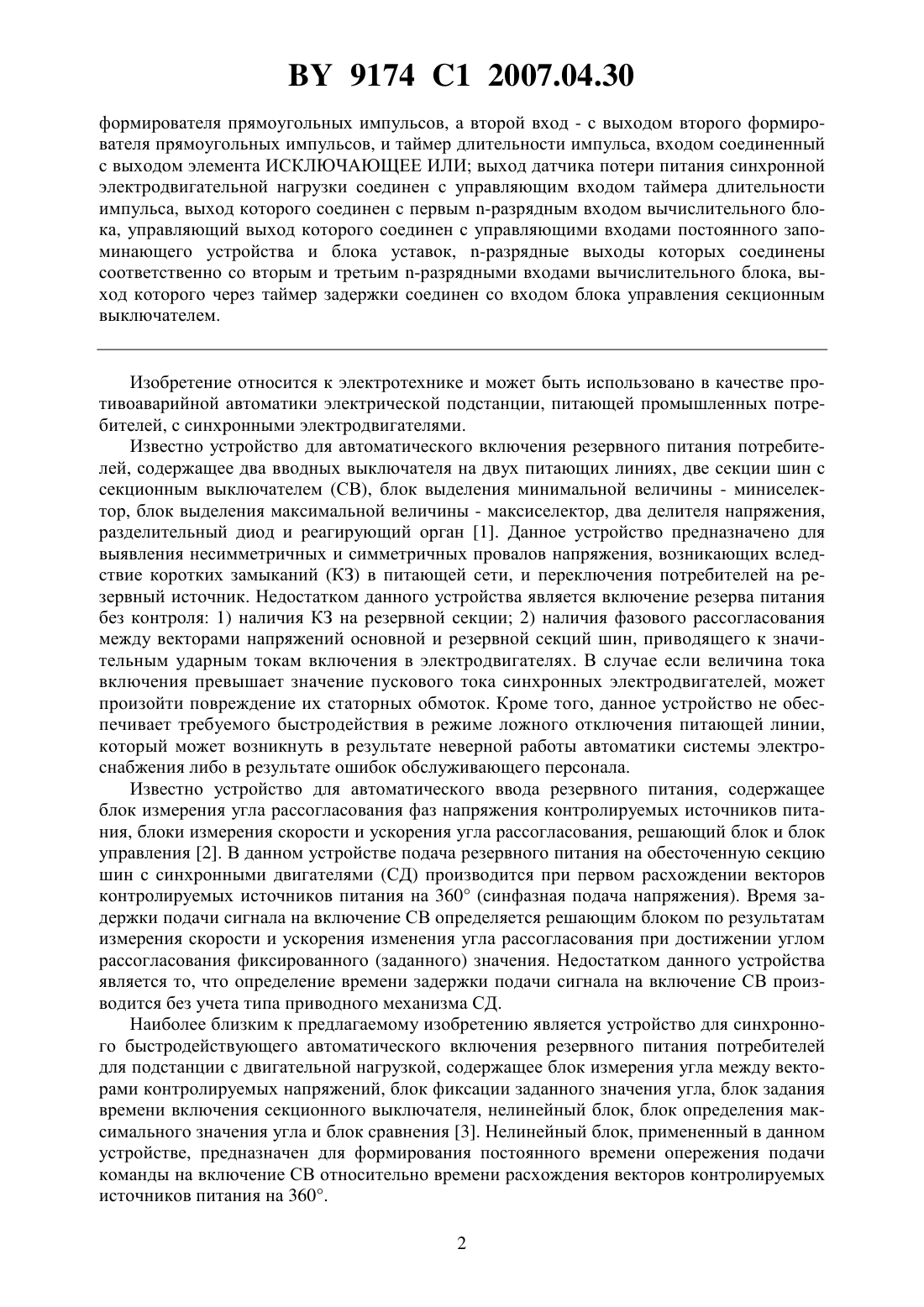
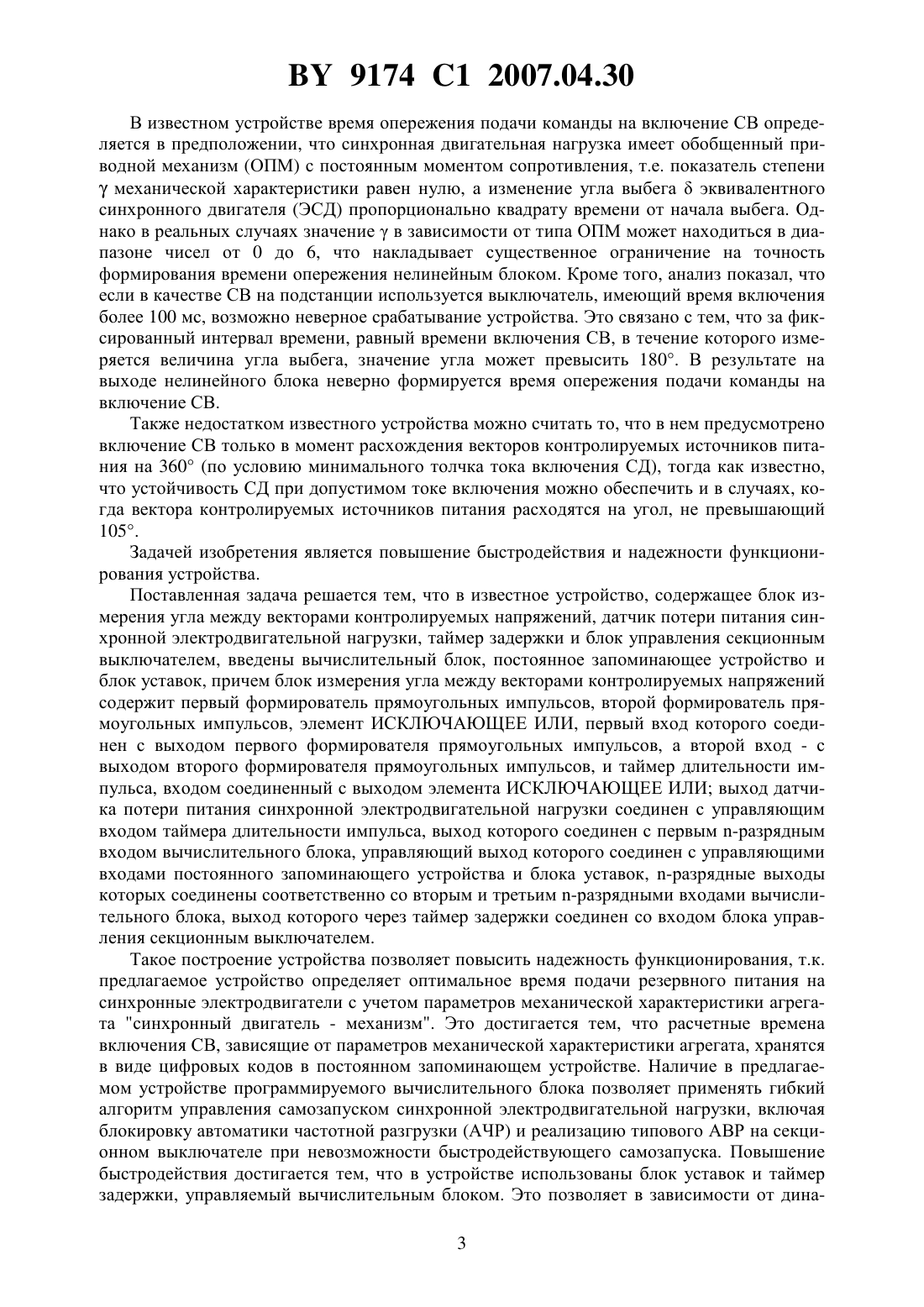
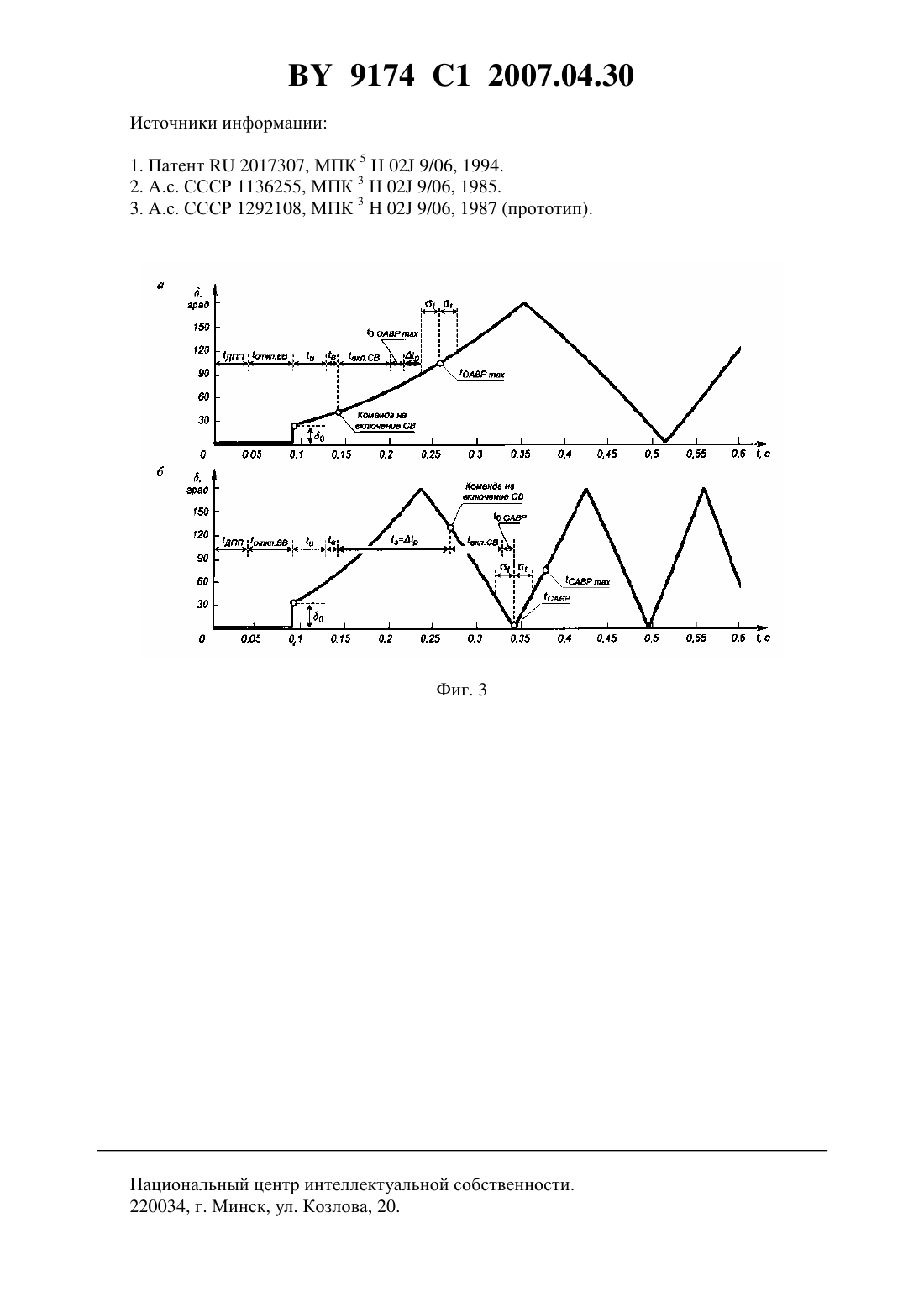
(51)02 9/06 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ БЫСТРОДЕЙСТВУЮЩЕГО САМОЗАПУСКА СИНХРОННОЙ ЭЛЕКТРОДВИГАТЕЛЬНОЙ НАГРУЗКИ(71) Заявитель Учреждение образования Гомельский государственный технический университет имени П.О. Сухого(72) Авторы Курганов Владимир Васильевич Крышнев Юрий Викторович Баранов Алексей Геннадьевич(73) Патентообладатель Учреждение образования Гомельский государственный технический университет имени П.О. Сухого(57) Устройство для быстродействующего самозапуска синхронной электродвигательной нагрузки, содержащее блок измерения угла между векторами контролируемых напряжений, датчик потери питания синхронной электродвигательной нагрузки, таймер задержки и блок управления секционным выключателем, отличающееся тем, что содержит вычислительный блок, постоянное запоминающее устройство и блок уставок, причем блок измерения угла между векторами контролируемых напряжений содержит первый формирователь прямоугольных импульсов, второй формирователь прямоугольных импульсов, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, первый вход которого соединен с выходом первого 9174 1 2007.04.30 формирователя прямоугольных импульсов, а второй вход - с выходом второго формирователя прямоугольных импульсов, и таймер длительности импульса, входом соединенный с выходом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ выход датчика потери питания синхронной электродвигательной нагрузки соединен с управляющим входом таймера длительности импульса, выход которого соединен с первым -разрядным входом вычислительного блока, управляющий выход которого соединен с управляющими входами постоянного запоминающего устройства и блока уставок, -разрядные выходы которых соединены соответственно со вторым и третьим -разрядными входами вычислительного блока, выход которого через таймер задержки соединен со входом блока управления секционным выключателем. Изобретение относится к электротехнике и может быть использовано в качестве противоаварийной автоматики электрической подстанции, питающей промышленных потребителей, с синхронными электродвигателями. Известно устройство для автоматического включения резервного питания потребителей, содержащее два вводных выключателя на двух питающих линиях, две секции шин с секционным выключателем (СВ), блок выделения минимальной величины - миниселектор, блок выделения максимальной величины - максиселектор, два делителя напряжения,разделительный диод и реагирующий орган 1. Данное устройство предназначено для выявления несимметричных и симметричных провалов напряжения, возникающих вследствие коротких замыканий (КЗ) в питающей сети, и переключения потребителей на резервный источник. Недостатком данного устройства является включение резерва питания без контроля 1) наличия КЗ на резервной секции 2) наличия фазового рассогласования между векторами напряжений основной и резервной секций шин, приводящего к значительным ударным токам включения в электродвигателях. В случае если величина тока включения превышает значение пускового тока синхронных электродвигателей, может произойти повреждение их статорных обмоток. Кроме того, данное устройство не обеспечивает требуемого быстродействия в режиме ложного отключения питающей линии,который может возникнуть в результате неверной работы автоматики системы электроснабжения либо в результате ошибок обслуживающего персонала. Известно устройство для автоматического ввода резервного питания, содержащее блок измерения угла рассогласования фаз напряжения контролируемых источников питания, блоки измерения скорости и ускорения угла рассогласования, решающий блок и блок управления 2. В данном устройстве подача резервного питания на обесточенную секцию шин с синхронными двигателями (СД) производится при первом расхождении векторов контролируемых источников питания на 360 (синфазная подача напряжения). Время задержки подачи сигнала на включение СВ определяется решающим блоком по результатам измерения скорости и ускорения изменения угла рассогласования при достижении углом рассогласования фиксированного (заданного) значения. Недостатком данного устройства является то, что определение времени задержки подачи сигнала на включение СВ производится без учета типа приводного механизма СД. Наиболее близким к предлагаемому изобретению является устройство для синхронного быстродействующего автоматического включения резервного питания потребителей для подстанции с двигательной нагрузкой, содержащее блок измерения угла между векторами контролируемых напряжений, блок фиксации заданного значения угла, блок задания времени включения секционного выключателя, нелинейный блок, блок определения максимального значения угла и блок сравнения 3. Нелинейный блок, примененный в данном устройстве, предназначен для формирования постоянного времени опережения подачи команды на включение СВ относительно времени расхождения векторов контролируемых источников питания на 360. 2 9174 1 2007.04.30 В известном устройстве время опережения подачи команды на включение СВ определяется в предположении, что синхронная двигательная нагрузка имеет обобщенный приводной механизм (ОПМ) с постоянным моментом сопротивления, т.е. показатель степенимеханической характеристики равен нулю, а изменение угла выбегаэквивалентного синхронного двигателя (ЭСД) пропорционально квадрату времени от начала выбега. Однако в реальных случаях значениев зависимости от типа ОПМ может находиться в диапазоне чисел от 0 до 6, что накладывает существенное ограничение на точность формирования времени опережения нелинейным блоком. Кроме того, анализ показал, что если в качестве СВ на подстанции используется выключатель, имеющий время включения более 100 мс, возможно неверное срабатывание устройства. Это связано с тем, что за фиксированный интервал времени, равный времени включения СВ, в течение которого измеряется величина угла выбега, значение угла может превысить 180. В результате на выходе нелинейного блока неверно формируется время опережения подачи команды на включение СВ. Также недостатком известного устройства можно считать то, что в нем предусмотрено включение СВ только в момент расхождения векторов контролируемых источников питания на 360 (по условию минимального толчка тока включения СД), тогда как известно,что устойчивость СД при допустимом токе включения можно обеспечить и в случаях, когда вектора контролируемых источников питания расходятся на угол, не превышающий 105. Задачей изобретения является повышение быстродействия и надежности функционирования устройства. Поставленная задача решается тем, что в известное устройство, содержащее блок измерения угла между векторами контролируемых напряжений, датчик потери питания синхронной электродвигательной нагрузки, таймер задержки и блок управления секционным выключателем, введены вычислительный блок, постоянное запоминающее устройство и блок уставок, причем блок измерения угла между векторами контролируемых напряжений содержит первый формирователь прямоугольных импульсов, второй формирователь прямоугольных импульсов, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, первый вход которого соединен с выходом первого формирователя прямоугольных импульсов, а второй вход - с выходом второго формирователя прямоугольных импульсов, и таймер длительности импульса, входом соединенный с выходом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ выход датчика потери питания синхронной электродвигательной нагрузки соединен с управляющим входом таймера длительности импульса, выход которого соединен с первым -разрядным входом вычислительного блока, управляющий выход которого соединен с управляющими входами постоянного запоминающего устройства и блока уставок, -разрядные выходы которых соединены соответственно со вторым и третьим -разрядными входами вычислительного блока, выход которого через таймер задержки соединен со входом блока управления секционным выключателем. Такое построение устройства позволяет повысить надежность функционирования, т.к. предлагаемое устройство определяет оптимальное время подачи резервного питания на синхронные электродвигатели с учетом параметров механической характеристики агрегата синхронный двигатель - механизм. Это достигается тем, что расчетные времена включения СВ, зависящие от параметров механической характеристики агрегата, хранятся в виде цифровых кодов в постоянном запоминающем устройстве. Наличие в предлагаемом устройстве программируемого вычислительного блока позволяет применять гибкий алгоритм управления самозапуском синхронной электродвигательной нагрузки, включая блокировку автоматики частотной разгрузки (АЧР) и реализацию типового АВР на секционном выключателе при невозможности быстродействующего самозапуска. Повышение быстродействия достигается тем, что в устройстве использованы блок уставок и таймер задержки, управляемый вычислительным блоком. Это позволяет в зависимости от дина 3 9174 1 2007.04.30 мики выбега агрегата производить включение секционного выключателя не только в момент расхождения векторов контролируемых источников питания на 360, но и в случаях,когда вектора контролируемых источников питания расходятся на угол, не превышающий 105. На фиг. 1 изображена блок-схема устройства для быстродействующего самозапуска синхронной электродвигательной нагрузки на основе измерения углового ускорения на фиг. 2 - времяимпульсные диаграммы выходных напряжений элементов блок-схемы на фиг. 3 - диаграммы угла выбега, поясняющие работу предлагаемого устройства. Устройство для быстродействующего самозапуска синхронной электродвигательной нагрузки на основе измерения углового ускорения содержит (фиг. 1) блок 1 измерения угла между векторами контролируемых напряжений, состоящий из первого 2 и второго 3 формирователей прямоугольных импульсов, элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 4, таймера 5 длительности импульса (ТДИ), датчик 6 потери питания (ДПП), вычислительный блок 7(ВБ), постоянное запоминающее устройство 8 (ПЗУ), блок 9 уставок (БУ), таймер 10 задержки (ТЗ), блок 11 управления секционным выключателем (БУСВ). Блок 1 измерения угла между векторами контролируемых напряжений предназначен для определения угла фазового рассогласования между векторами основного Е и резервногоисточников питания. Формирователи 2 и 3 прямоугольных импульсов служат для выделения из переменного напряжения основного источникапитания потребителей и переменного напряжения резервного источникаэквивалентных по длительности прямоугольных импульсов, которые будут преобразованы элементом 4 в импульсы Т фазового рассогласования векторов Е и . Таймер 5 длительности импульса представляет собой двоичный счетчик с фиксированной опорной частотой, который служит для преобразования длительности каждого из импульсов Т в соответствующий цифровой код. Датчик 6 потери питания предназначен для выявления режима КЗ в питающей линии по величине и знаку активной мощности на основной секции шин либо для выявления режима ложного отключения питающей линии по величине угламежду векторами Е и . При обнаружении одного из указанных аварийных режимов на выходе датчика 6 будет сформирован сигнал на отключение вводного выключателя (ВВ) основной секции шин. Управляющий сигнал с датчика 6 потери питания через время, равное времени отключения ВВ, поступит на управляющий вход таймера 5 длительности импульса, разрешая преобразование длительностей импульсов Т в цифровой код, который появится на первом -разрядном входе вычислительного блока 7. Формирование управляющего сигнала с выхода датчика 6 потери питания может быть реализовано по факту размыкания блок-контактов ВВ. В соответствии с логикой работы вычислительного блока 7, при возникновении аварийного режима электроснабжение ответственных потребителей 6 (10) кВ должно быть обеспечено путем включения СВ в заданный (расчетный) момент времени в одном из двух следующих режимов. 1. В режиме опережающего автоматического включения резервного питания (ОАВР). В этом случае включение электродвигательной нагрузки на резервное питание производится на интервале времени до первой противофазы векторови Е, когда угол между этими векторами еще не превышает значения 105. В данном режиме обеспечивается сохранение динамической устойчивости эквивалентного СД. 2. В режиме синфазного автоматического включения резервного питания (САВР). В этом случае включение электродвигательной нагрузки на резервное питание производится на интервале времени, соответствующем одному полному провороту вектора Е относительно вектора(т.е. в момент синфазности этих векторов), когда угол включения близок к 360. В данном режиме обеспечивается сохранение результирующей устойчивости эквивалентного СД. Таким образом, вычислительный блок 7 служит для определения оптимального времени включения потребителей, подключенных к основной секции шин, на резервный ис 4 9174 1 2007.04.30 точник питания. Входной информацией для вычислительного блока 7 являются величины импульсов Т, свидетельствующие о динамике изменения угла выбегаЭСД на начальном этапе выбега, а выходной информацией - время з задержки до включения СВ, получаемое путем расчета оптимального момента времени, в который следует подать команду на включение СВ. При этом учитываются значения динамических параметров выбега ЭСД,динамических параметров устройства и скоростных характеристик применяемого СВ. Принцип прогнозирования оптимального времени включения ЭСД на резервную секцию шин основан на том, что в первый момент времени после потери питания начальное угловое ускорение (НУУ) вектора Е, т.е. вектора ЭДС синхронной электродвигательной нагрузки, определяется по формуле где 0 - начальное угловое ускорение вектора ЭДС синхронной электродвигательной нагрузки (рад/с 2) 0 - частота сетевого напряжения, равная 50 Гц- коэффициент загрузки эквивалентного СД по активной мощности при синхронной угловой скорости- эквивалентная электромеханическая постоянная времени синхронной электродвигательной нагрузки с учетом моментов инерции приводных механизмов. Так как изменение угла выбегаЭСД зависит от параметра 0, можно на начальной стадии выбега ЭСД по известной величине 0 рассчитывать значения интервалов времени до достижения определенных значений угла выбега ЭСД. Таким образом, уже на начальном этапе выбега после потери питания ЭСД можно прогнозировать наличие и продолжительность временных зон допустимого включения ЭСД на резервное питание при быстродействующем самозапуске. Диапазон изменения величины 0 в характерных режимах выбега синхронной электродвигательной нагрузки напряжением 6 (10) кВ составляет 40400 рад/с 2. В постоянном запоминающем устройстве 8 содержатся таблицы следующих значений 1) максимальное время ОАВР ОАВР- интервал времени от отключения вводного выключателя до достижения максимально допустимого угла выбега по условию величины тока включения СД при реализации ОАВР, равного 105 2) время синфазности- интервал времени от отключения вводного выключателя до достижения угла выбега 360 (время одного полного проворота вектора Е относительно вектора ) 3) максимальное время САВР- интервал времени от отключения вводного выключателя до достижения максимально допустимого угла выбега по условию величины тока включения СД при реализации САВР, равного 435. При появлении на управляющем входе ПЗУ 8 сигнала от вычислительного блока 7 на втором -разрядном входе последнего установится цифровой код, соответствующий величине времени,либо. Данные коды будут нелинейно зависеть от значения НУУ, передаваемого в ПЗУ 8 вычислительным блоком 7 по входу управления. Таблицы расчетных значений времени ОАВР и времени САВР, которые необходимо записать в ПЗУ 8, составляются после предварительного расчета для ряда дискретных значений 0 в диапазоне от 40 до 400 рад/с 2. Расчетное максимальное время ОАВР, расчетное время синфазности либо расчетное максимальное время САВР при заданном значении НУУ определяют путем численного решения относительно времениуравнения для угла выбега ЭСД , принимаемого равным соответственно 105, 360 или 435 где- показатель степени механической характеристики ОПМ, который может изменяться в диапазоне действительных чисел от 0,01 до 6 0 - относительный начальный момент сопротивления ОПМ (составляющая момента сопротивления, не зависящая от угловой скорости ЭСД). Аналитическое выражение (2) для угла выбега получено путем приближенного решения дифференциального уравнения движения одномассовой системы при электромагнитном моменте, равном нулю, для обобщенного представления момента сопротивления. В случаях переменной загрузки разнотипных агрегатов 6 (10) кВ, участвующих в выбеге, значения величини 0 при расчете по выражению (2) задают как уставки в некотором усредненном виде с учетом минимизации модуля возможной ошибки прогноза по углу включения. При этом отдельно рассматривают, например, коэффициенты загрузки механизмов компрессорной группы (показатель степенимеханической характеристики равен 0) и насосной группы (показатель степени у механической характеристики превышает 2). При изменении параметров электродвигательной нагрузки, подключенной к основной секции шин (например, в связи с заменой одного типа двигателей на другой),производят экспериментальное определение величини 0 , а затем выполняют расчет таблиц значений, ,и перепрограммирование ПЗУ 8. В блоке 9 уставок содержатся значения динамических параметров устройства, а также значения скоростных характеристик применяемого СВ 1) время И измерения величины НУУ,2) времяреализации вычислительного алгоритма вычислительным блоком 7,3) время вкл.СВ включения СВ,4) максимальный разбросвремени включения СВ. Перечисленные величины могут быть откорректированы обслуживающим персоналом в случае изменения типа выключателей, применяемых на подстанции, либо при изменении динамических параметров самого устройства. Цифровые коды значений динамических параметров устройства и скоростных характеристик применяемого СВ с приходом управляющего сигнала от ВБ 7 попадут с выхода БУ 9 на третий -разрядный вход ВБ 7. Таймер 10 задержки выполнен на основе двоичного вычитающего счетчика и предназначен для формирования времени з задержки до включения СВ. При помощи ТЗ 10 цифровой код, который поступит с выхода ВБ 7, будет преобразован в соответствующий интервал времени. По окончании выдержки времени, формируемой таймером 10 задержки, сигнал поступит на вход блока 11 управления секционным выключателем. Таким образом, включение СВ и перевод потерявших питание потребителей на резервный источник питания произойдет в момент времени, при котором возможно сохранение устойчивости синхронной электродвигательной нагрузки, а ток и электромагнитный момент включения СД не превысят критических значений. Устройство для быстродействующего самозапуска синхронной электродвигательной нагрузки на основе измерения углового ускорения работает следующим образом. При функционировании устройства в режиме нормального электроснабжения основной секции шин сигналыиимеют одинаковую частоту, равную 50 Гц, при этом на вводных выключателях обеих секций шин поток активной мощности направлен от источника питания к нагрузке. В указанных условиях ДПП 6 не срабатывает. Длительности импульсов , имеющие в нормальном режиме электроснабжения малую величину, не 9174 1 2007.04.30 проходят на выход таймера 5 длительности импульса и не попадают на вход вычислительного блока 7 сигналы на отключение ВВ и включение СВ не формируются. В аварийном режиме устройство работает следующим образом. 1. В случае возникновения режима КЗ питающей линии основного источника СД переходят в генераторный режим, поток активной мощности направлен от шин питания нагрузки к источнику питания. Благодаря тому, что ДПП 6 контролирует фазовое рассогласование сигналов напряжения и тока во всех трех фазах основной секции шин,распознаются КЗ любого типа. 2. В случае возникновения режима ложного отключения питающей линии уголмежду векторами Е инелинейно возрастает, причем начальное угловое ускорение 0 вектора Е всегда превышает 40 рад/с 2, что позволяет отличить режим потери питания от режима дефицита активной мощности в энергосистеме. Таким образом, при возникновении режима КЗ либо режима ложного отключения питающей линии срабатывает ДПП 6, формируя команду на отключение ВВ. После отключения ВВ вычислительный блок 7 начинает получать на первый -разрядный вход временные интервалы , формируемые на выходе элемента 4 (фиг. 2) и измеряемые таймером 5 длительности импульса. Вычислительный блок 7 записывает в память длительность импульса 0, а затем определяет величину 0 начального углового ускорения вектора Е по величинам четырех смежных временных интерваловкак приближение второй производной функции угла выбега 0(32 )(10 )10 6 ,(3) 2 где 0, Т 1, Т 2, Т 3 - длительности смежных импульсов на выходе элемента 4. Использование четырех, а не трех смежных отсчетов угла выбега при определении значения НУУ обусловлено требованием оптимизации важной эксплуатационной характеристики устройства - независимости рассчитываемой величины 0 от возможного дрейфа порогового уровня формирователей 2 и 3. После определения величины 0 вычислительный блок 7 считывает из ПЗУ 8 расчетные значения, ,, соответствующие данному значению 0. Из блока 9 уставок в вычислительный блок 7 загружаются значения И, , вкл. СВ и . Затем вычислительный блок 7, исходя из известных величин 0 и Т 0, рассчитывает корректирующие интервалы времени 0, 0 , 0, соответствующие разнице между расчетным и фактическим временем от момента отключения ВВ до момента достижения углом выбега значений 105, 360 и 435. Фактическое время включения несколько меньше расчетного за счет наличия некоторого начального угла выбега 0, присутствующего между векторамии Е после отключения ВВ(4) 0200. Корректирующие интервалы времени, приведенные к моменту времени включения СВ, определяются по приближенной формуле 2110 0 ,0 где 0 - длительность корректирующего интервала времени- число проворотов вектора Е относительно вектора . При расчете вычислительным блоком 7 значений по формуле (5) для 0 принимают 0,29, для 0 САВР принимают 1 и для 0 САВРпринимают 1,21. Согласно алгоритму работы устройства, выбор режима подачи резервного питания на выбегающий ЭСД осуществляется в темпе процесса выбега, исходя из анализа соотношения величин, ,, 0, 0 , 0, И, , вкл. СВ и .реализуется при выполнении условия(6)-(Ивкл. СВ 0) 0. Если условие (6) выполняется, вычислительный блок 7 выставляет на входе таймера 10 задержки нулевой цифровой код, т.е. сигнал включения без выдержки времени поступает на вход блока 11 управления секционным выключателем. В том случае, если условие (6) не выполняется, проверяется возможность осуществления САВР. Для этого проверяются два условия(8)-. Если условия (7) и (8) выполняются, вычислительный блок 7 выставляет на входе таймера 10 задержки цифровой код времени задержки з, совпадающий с рассчитанным значением располагаемого запаса времени . По окончании данной выдержки времени сигнал поступит на вход блока 11 управления секционным выключателем. В том случае, если условие (6), а также условия (7) или (8) не выполняются, логика работы устройства может разрешить реализацию типового АВР на секционном выключателе, которое срабатывает через время 25 с. В данном режиме отсутствует риск повреждения конструкции СД, подключаемых к резервной секции шин, при условии, что за указанное время погаснет их магнитное поле. Однако необходимо учитывать, что во многих практических случаях самозапуск двигателей в данном режиме не обеспечивается по условию высокого момента сопротивления приводного механизма или затягивается на время, недопустимое по условиям непрерывного технологического процесса. Кроме того,за время 25 с СД могут быть отключены от общих шин питания защитой минимального напряжения (ЗМН). Диаграммы угла выбега, поясняющие работу предлагаемого устройства в режимах ОАВР и САВР при двух различных режимах выбега двигательной нагрузки, показаны на фиг. 3, где а - зависимость угла выбега от времени при параметрах 4, 050 рад/с 2,025, 00,15 и распределение расчетного времени ОАВР при О 0,28 с б зависимость угла выбега от времени при параметрах 3, 0120 рад/с 2, 034,00,25 и распределение расчетного времени САВР при 0,345 с. Таким образом, устройство для быстродействующего самозапуска синхронной электродвигательной нагрузки на основе измерения углового ускорения по сравнению с известным устройством обеспечивает следующие преимущества. 1. Повышение быстродействия, т.к. в устройстве предусмотрено включение секционного выключателя не только в момент расхождения векторов контролируемых источников питания на 360 (синфазное АВР), но и в случаях, когда вектора контролируемых источников питания расходятся на угол, не больший 105 (опережающее АВР). 2. Повышение надежности функционирования, т.к. предлагаемое устройство при расчете оптимального времени подачи резервного питания на синхронные электродвигатели учитывает параметры механической характеристики агрегата - показатель степенизависимости момента сопротивления от угловой скорости и относительный начальный момент сопротивления приводного механизма 0 . Кроме того, повышается точность прогнозирования оптимального времени подачи команды на включение синхронных двигателей,т.к. расчетные времена включения хранятся в виде цифровых кодов в постоянном запоминающем устройстве. Использование в устройстве величины начального углового ускорения в качестве основного информативного параметра позволяет отличить режим потери питания синхронных двигателей от режимов дефицита и избытка активной мощности в энергосистеме и при необходимости блокировать АЧР при работе устройства. Благодаря наличию программируемого вычислительного блока предлагаемое устройство может при невозможности осуществления быстродействующего самозапуска синхронных двигателей разрешить реализацию типового АВР на секционном выключателе. 8 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H02J 9/06
Метки: самозапуска, быстродействующего, синхронной, электродвигательной, нагрузки, устройство
Код ссылки
<a href="https://by.patents.su/9-9174-ustrojjstvo-dlya-bystrodejjstvuyushhego-samozapuska-sinhronnojj-elektrodvigatelnojj-nagruzki.html" rel="bookmark" title="База патентов Беларуси">Устройство для быстродействующего самозапуска синхронной электродвигательной нагрузки</a>
Блокировочное устройство для быстродействующего выключателя
Номер патента: 1759
Опубликовано: 30.09.1997
Авторы: Эрнст Штудер, Серж Мартэн, Анри Дюффур
МПК: H01H 3/42
Метки: устройство, блокировочное, быстродействующего, выключателя
Текст:
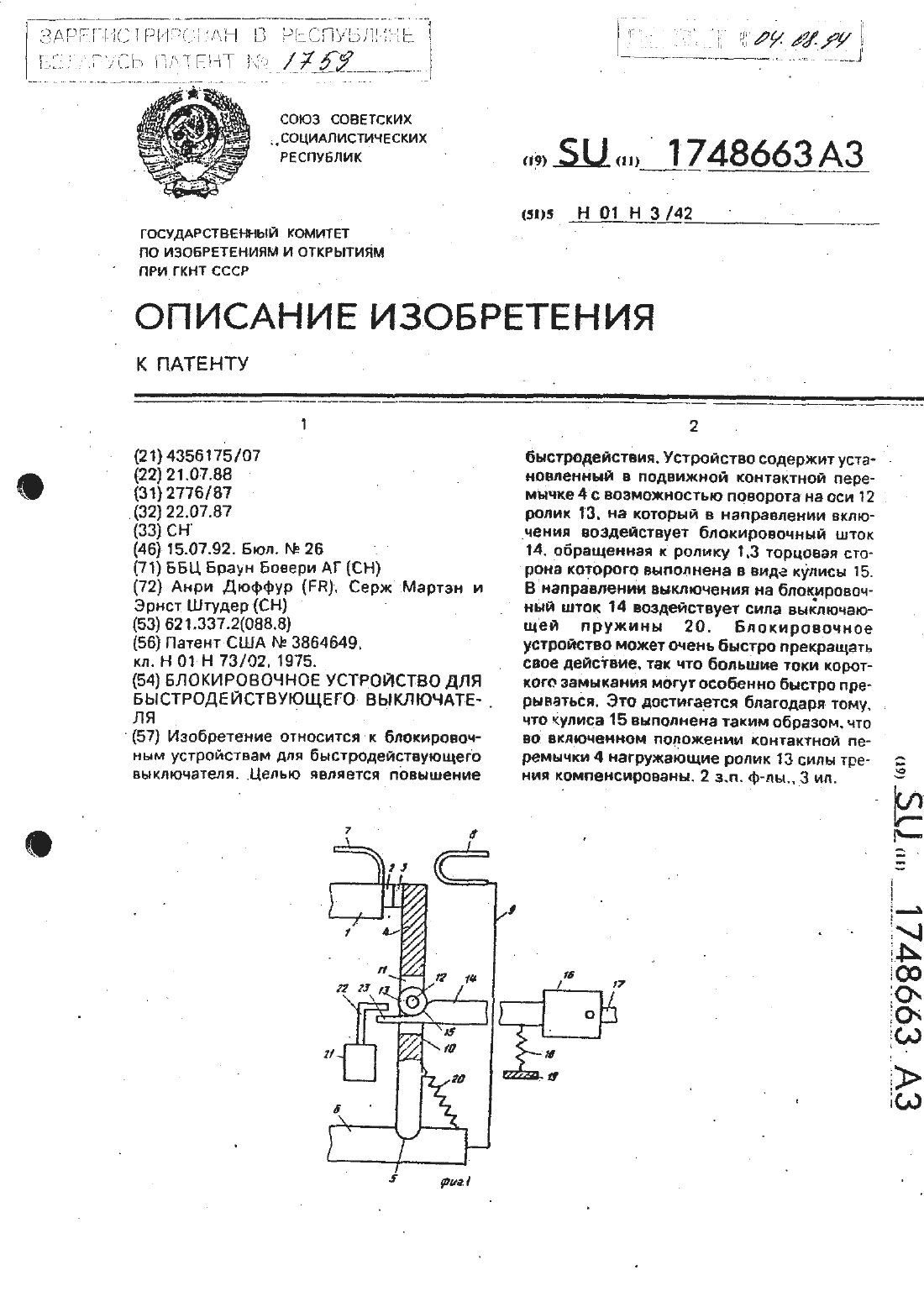
...выступает через отверстие 11. При этом блокировочный шток 14 отжимается вниз и ролик 13 катится вдоль кулисы 15 в направлении выключения. Таким образомочень быстро ликвидируется блокировка между роликом и блокировочным штоком 14. Выполненная в виде кулисы 15 торцовая сторона блокировочного штока 14 час тично подогнана кконтуру ролика. Начиная гс точки А. подогнана-тая к контуру ролика часть кулисы 15 переходит в проходящий тангенциально к-...
Устройство для питания электрической нагрузки

Номер патента: 3914
Опубликовано: 30.06.2001
Автор: Владимир СОКОЛОВ
МПК: H05B 33/08, H02M 3/156, H05B 39/04...
Метки: нагрузки, устройство, питания, электрической
Текст:
...электронной сирены. В соответствии с фиг. 1 к имеющему напряжение батареи В источнику напряжения 2 с помощью коммутационного устройства 6 подключена нагрузка , которая имеет номинальное напряжение . 3914 1 В качестве источника напряжения 2 может быть использована батарея или обычное выпрямительное устройство, которое переменное напряжение сети, например 220 В, с помощью трансформатора, выпрямителя и сглаживающего конденсатора преобразует в...
Устройство циклического изменения нагрузки стенда испытаний гидроузлов
Номер патента: U 1492
Опубликовано: 30.09.2004
Авторы: Матюшкин Александр Михайлович, Мартынков Олег Викторович, Усс Иван Никодимович, Пилипенко Владимир Иванович
МПК: F04B 51/00, F15B 19/00
Метки: циклического, нагрузки, гидроузлов, изменения, стенда, устройство, испытаний
Текст:
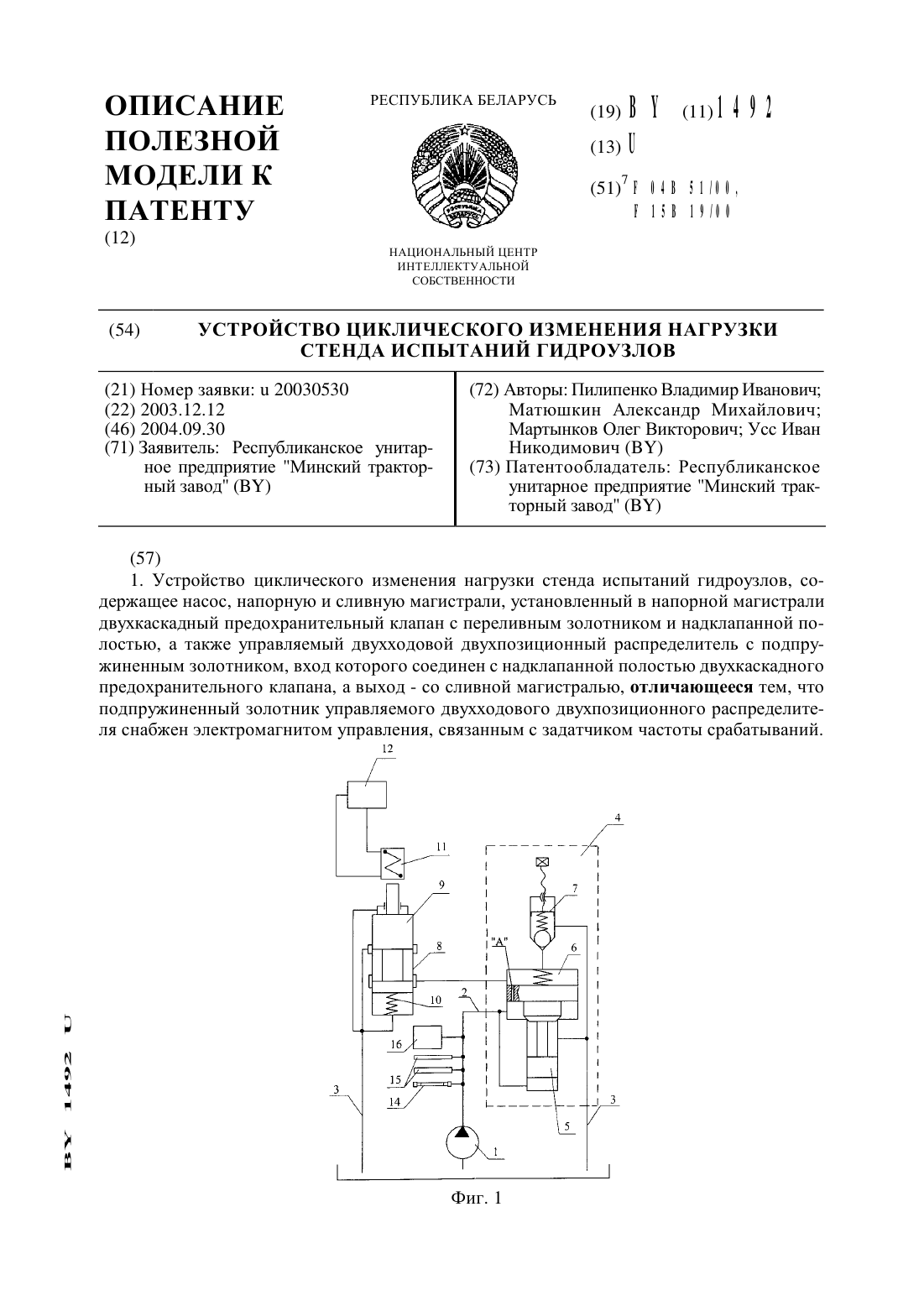
...в напорной магистрали двухкаскадный предохранительный клапан с переливным золотником и надклапанной полостью, а также управляемый двухходовой двухпозиционный распределитель с подпружиненным золотником, вход которого соединен с надклапанной полостью, а выход - со сливной магистралью, подпружиненный золотник управляемого двухходового двухпозиционного разгрузочного распределителя снабжен электромагнитом управления, связанным с...
Устройство для измерения нагрузки колеса на рельс
Номер патента: U 3542
Опубликовано: 30.04.2007
Авторы: Дубина Анатолий Владимирович, Шубадеров Валерий Николаевич
МПК: B61K 9/00
Метки: колеса, измерения, рельс, устройство, нагрузки
Текст:
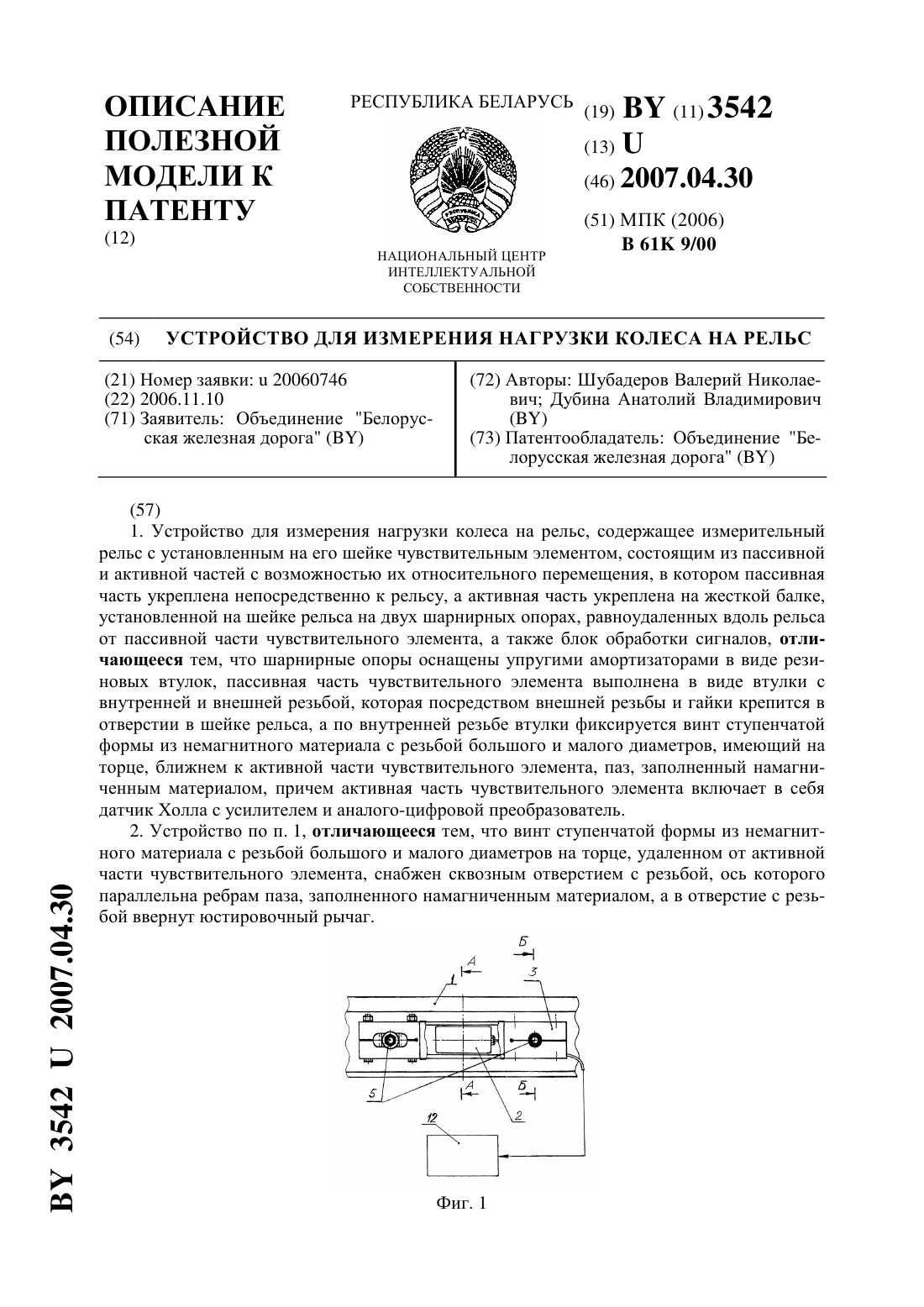
...надежность. Задачей заявляемой полезной модели является повышение эксплуатационной надежности предлагаемого устройства. 2 35422007.04.30 Задача решается следующим образом. Известное устройство для измерения нагрузки колеса на рельс содержит измерительный рельс и установленный на его шейке чувствительный элемент, выполненный из пассивной и активной частей с возможностью их относительного перемещения, в котором пассивная часть укреплена...
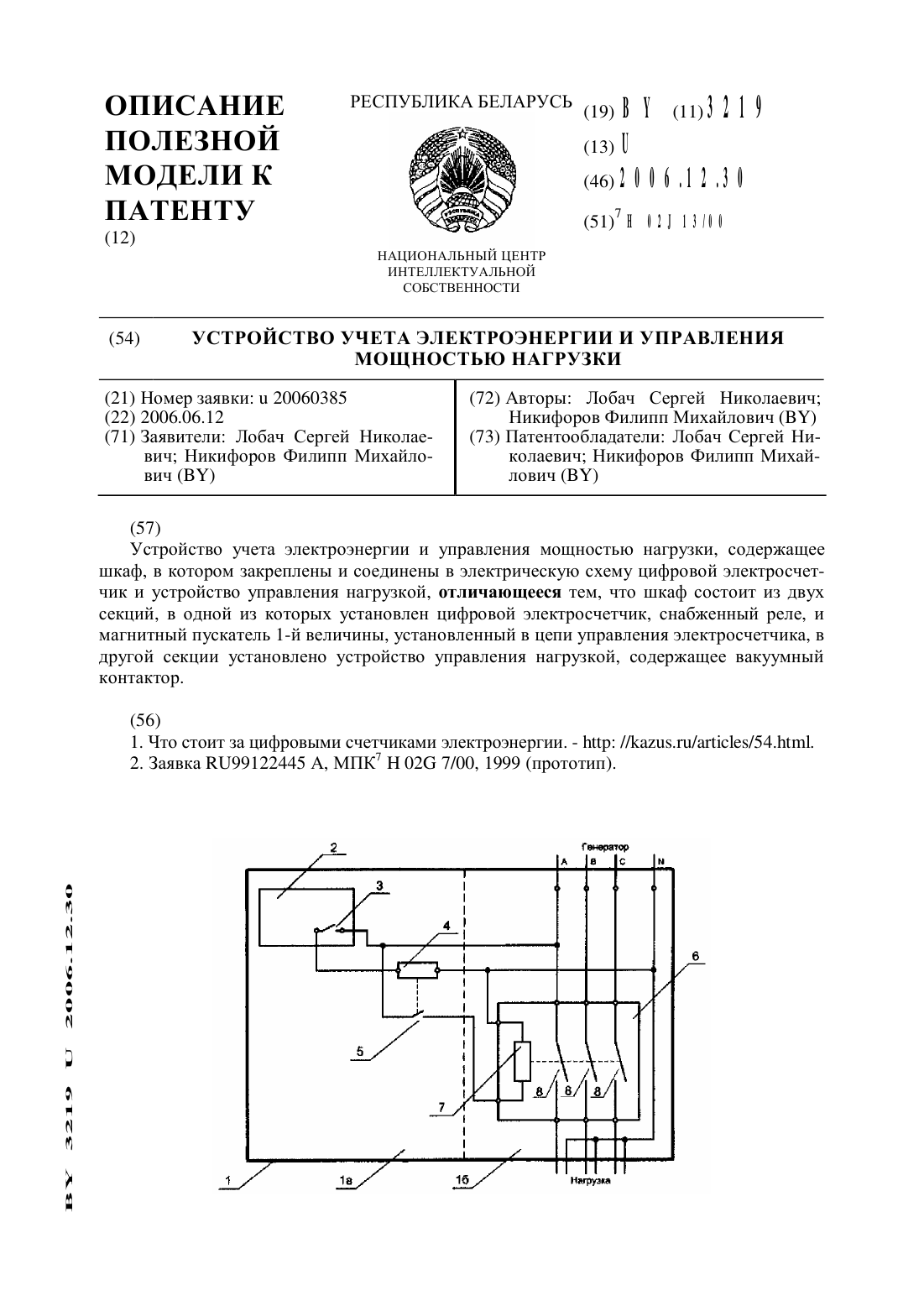
Устройство учета электроэнергии и управления мощностью нагрузки
Номер патента: U 3219
Опубликовано: 30.12.2006
Авторы: Никифоров Филипп Михайлович, Лобач Сергей Николаевич
МПК: H02J 13/00
Метки: нагрузки, управления, мощностью, устройство, электроэнергии, учета
Текст:
...устройство учета потребления электроэнергии не обеспечивает управления мощностью нагрузки свыще 100 А.Задачей полезной модели является обеспечение достаточно экономичного контроля,учета и управления потреблением электроэнергии посредством цифрового электросчетчика, а также обеспечение автоматического контроля и управления мощностью нагрузки потребителя до 250 А.Поставленная задача рещается за счет устройства учета электроэнергии и...
Предыдущий патент: Глушитель шума выпуска газов двигателя внутреннего сгорания
Следующий патент: Способ производства биологически активной добавки (варианты)
Случайный патент: Ультразвуковая установка для очистки емкостей