Устройство для измерения релаксационных характеристик ферромагнитного материала
Номер патента: U 8160
Опубликовано: 30.04.2012
Авторы: Осипов Александр Александрович, Короткевич Зоя Марковна, Матюк Владимир Федорович

Текст
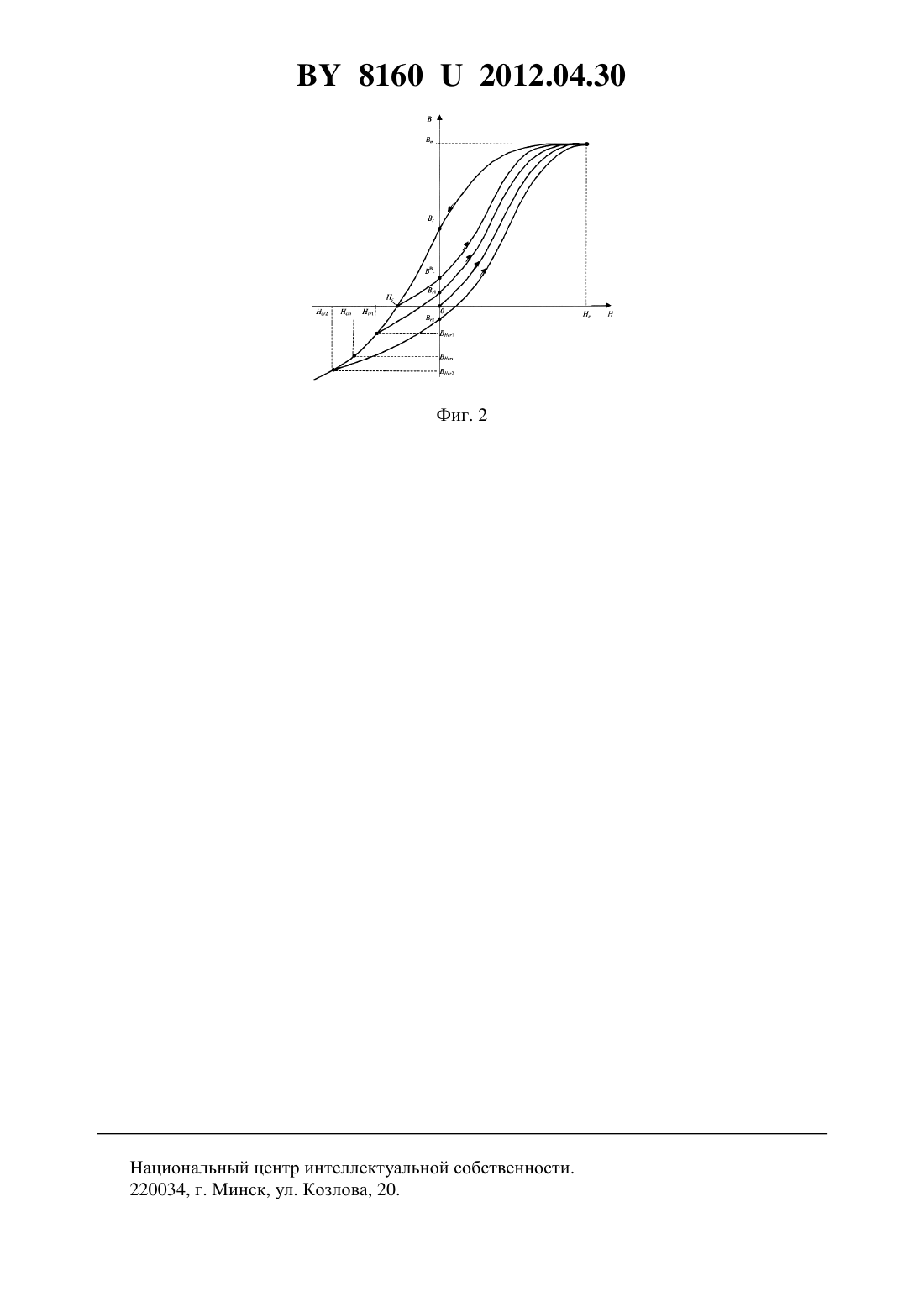
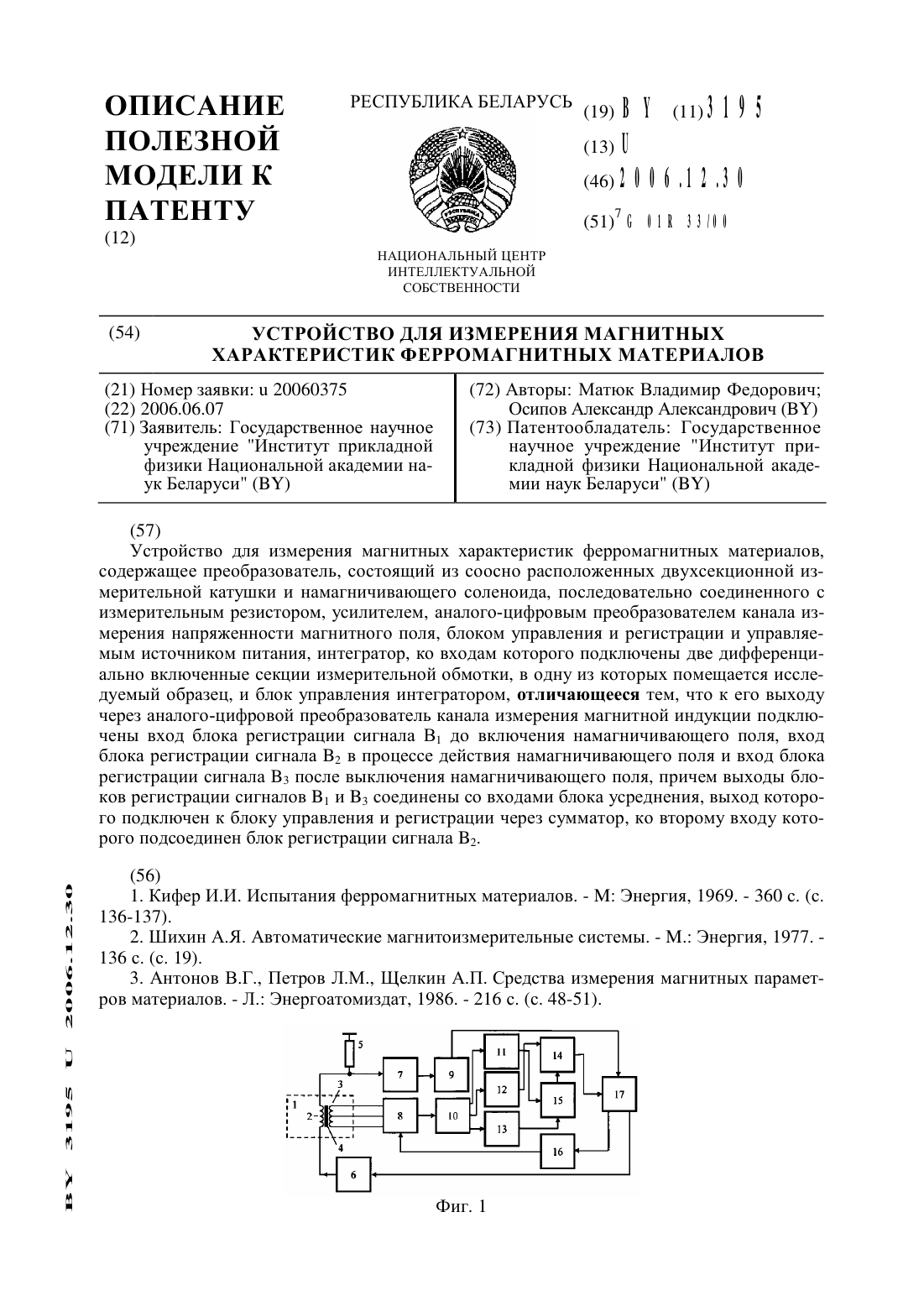
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РЕЛАКСАЦИОННЫХ ХАРАКТЕРИСТИК ФЕРРОМАГНИТНОГО МАТЕРИАЛА(71) Заявитель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(72) Авторы Матюк Владимир Федорович Осипов Александр Александрович Короткевич Зоя Марковна(73) Патентообладатель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(57) Устройство для измерения релаксационных характеристик ферромагнитного материала, содержащее намагничивающий блок, датчик напряженности магнитного поля и измерительную катушку, расположенные внутри намагничивающего блока, управляемый источник тока, подсоединенный к намагничивающему блоку, блок измерения напряженности магнитного поля, вход которого подсоединен к датчику напряженности магнитного поля, блок измерения магнитной индукции, подсоединенный к измерительной катушке,блок индикации и блок питания, отличающееся тем, что оно дополнительно содержит три компаратора, блок управления, блок хранения информации, блок вычисления, блок вычисления поправки и блок сравнения, причем выход блока измерения напряженности магнитного поля подсоединен к первым входам первого и второго компараторов и блока хранения информации, выход блока измерения магнитной индукции подсоединен к первому входу третьего компаратора и второму входу блока хранения информации, второй 81602012.04.30 вход первого компаратора соединен с первым выходом блока управления, вторые входы второго и третьего компараторов соединены с нулевым уровнем, выходы компараторов соединены соответственно с первым, вторым и третьим входами блока управления, второй, третий, четвертый, пятый и шестой выходы блока управления соединены соответственно с третьим входом блока хранения информации, первым входом блока вычисления,первым входом блока вычисления поправки, первым входом блока сравнения и входом управляемого источника тока, четвертый вход и первый, второй, третий и четвертый выходы блока хранения информации подсоединены соответственно к выходу блока вычисления и четвертому входу блока управления, второму входу блока вычисления поправки,второму входу блока сравнения, второму входу блока вычисления и входу блока индикации, третий вход блока вычисления соединен с выходом блока вычисления поправки, а выход блока сравнения соединен с пятым входом блока управления.(56) 1. Кифер И.И. Испытания ферромагнитных материалов. - М. Энергия, 1969. С. 136-137. 2. Шихин А.Я. Автоматические магнитоизмерительные системы. - М. Энергия,1977. - С. 19. 3. Антонов В.Г., Петров Л.М., Щелкин А.П. Средства измерения магнитных параметров материалов. - Л. Энергоатомиздат, 1986. - С. 48-51. Полезная модель относится к области магнитных измерений и может быть использована для измерения релаксационных характеристик (релаксационной коэрцитивной силы и релаксационной магнитной индукции) ферромагнитных материалов. Известно устройство 1 для измерения магнитных характеристик ферромагнитных материалов, состоящее из источника постоянного тока, соединенного последовательно с намагничивающей обмоткой, в которую помещают исследуемый образец, и, в зависимости от положения переключателя направления тока, либо с первым реостатом для регулировки тока в намагничивающей цепи и первым амперметром для измерения тока в этой цепи, либо со вторым реостатом для регулировки тока в размагничивающей цепи и вторым амперметром для измерения тока в этой цепи, которые шунтируются первым электрическим ключом, баллистического гальванометра, последовательно соединенного через второй электрический ключ с измерительной катушкой, вторичной обмоткой образцовой катушки взаимной индуктивности и магазином сопротивлений, первичная обмотка образцовой катушки взаимной индуктивности через последовательно соединенные третий реостат, третий амперметр и третий электрический ключ подсоединена ко второму источнику постоянного тока. Недостатками известного устройства являются низкая производительность и точность измерений релаксационной коэрцитивной силы и релаксационной магнитной индукции ферромагнитного материала. Известно устройство 2 для измерения магнитных характеристик ферромагнитных материалов, состоящее из преобразователя частоты, подключенного к управляемому фазорегулятором электромагниту, в который помещают исследуемый образец, измерительных обмоток индукции и напряженности поля, размещенных внутри электромагнита и подключенных последовательно к интегрирующим усилителям и управляемым фазорегулятором выпрямителям, выходы которых подсоединены к электронному осциллографу и вольтметрам средних значений. Недостатками известного устройства являются низкая производительность и точность измерений релаксационной коэрцитивной силы и релаксационной магнитной индукции ферромагнитного материала. 81602012.04.30 Наиболее близким по технической сущности к заявляемой полезной модели является устройство для измерения магнитных характеристик ферромагнитных материалов 3, содержащее преобразователь, состоящий из соосно расположенных намагничивающего соленоида и измерительной катушки, в которые помещается исследуемый образец,измерительный резистор, усилитель, управляемый источник питания, интегратор, блок компенсации дрейфа интегратора и блок управления и регистрации. Выход управляемого источника питания через намагничивающий соленоид соединен с измерительным резистором и входом усилителя, выход которого соединен с первым входом блока управления и регистрации. Вход интегратора соединен с измерительной катушкой и выходом блока компенсации дрейфа интегратора, а выход - со входом блока компенсации дрейфа интегратора и вторым входом блока управления и регистрации. Второй выход блока управления и регистрации соединен со вторым входом блока компенсации дрейфа интегратора. Недостатками известного устройства являются низкая производительность и точность измерений релаксационной коэрцитивной силы и релаксационной магнитной индукции ферромагнитного материала. Задачей заявляемой полезной модели является повышение производительности и точности измерений релаксационной коэрцитивной силы и релаксационной магнитной индукции ферромагнитного материала. Сущность заявляемой полезной модели заключается в том, что она содержит намагничивающий блок, датчик напряженности магнитного поля и измерительную катушку,расположенные внутри намагничивающего блока, управляемый источник тока, подсоединенный к намагничивающему блоку, блок измерения напряженности магнитного поля,вход которого подсоединен к датчику напряженности магнитного поля, блок измерения магнитной индукции, подсоединенный к измерительной катушке, блок индикации, блок питания, три компаратора, блок управления, блок хранения информации, блок вычисления,блок вычисления поправки и блок сравнения, причем выход блока измерения напряженности магнитного поля подсоединен к первым входам первого и второго компараторов и блока хранения информации, выход блока измерения магнитной индукции подсоединен к первому входу третьего компаратора и второму входу блока хранения информации, второй вход первого компаратора соединен с первым выходом блока управления, вторые входы второго и третьего компараторов соединены с нулевым уровнем (землей), выходы компараторов соединены соответственно с первым, вторым и третьим входами блока управления, второй, третий, четвертый, пятый и шестой выходы блока управления соединены соответственно с третьим входом блока хранения информации, первым входом блока вычисления, первым входом блока вычисления поправки, первым входом блока сравнения и входом управляемого источника тока, четвертый вход и первый, второй, третий и четвертый выходы блока хранения информации подсоединены соответственно к выходу блока вычисления и четвертому входу блока управления, второму входу блока вычисления поправки, второму входу блока сравнения, второму входу блока вычисления и входу блока индикации, третий вход блока вычисления соединен с выходом блока вычисления поправки, а выход блока сравнения соединен с пятым входом блока управления. В отличие от известного устройства в предлагаемой полезной модели дополнительно введены три компаратора, блок управления, блок хранения информации, блок вычисления,блок вычисления поправки и блок сравнения, причем выход блока измерения напряженности магнитного поля подсоединен к первым входам первого и второго компараторов и блока хранения информации, выход блока измерения магнитной индукции подсоединен к первому входу третьего компаратора и второму входу блока хранения информации, второй вход первого компаратора соединен с первым выходом блока управления, вторые входы второго и третьего компараторов соединены с нулевым уровнем (землей), выходы компараторов соединены соответственно с первым, вторым и третьим входами блока управления, второй, третий, четвертый, пятый и шестой выходы блока управления соеди 3 81602012.04.30 нены соответственно с третьим входом блока хранения информации, первым входом блока вычисления, первым входом блока вычисления поправки, первым входом блока сравнения и входом управляемого источника тока, четвертый вход и первый, второй, третий и четвертый выходы блока хранения информации подсоединены соответственно к выходу блока вычисления и четвертому входу блока управления, второму входу блока вычисления поправки, второму входу блока сравнения, второму входу блока вычисления и входу блока индикации, третий вход блока вычисления соединен с выходом блока вычисления поправки, а выход блока сравнения соединен с пятым входом блока управления. Это позволяет повысить производительность и точность измерений релаксационной коэрцитивной силы и релаксационной магнитной индукции ферромагнитного материала за счет последовательного автоматического приближения измеряемой величины релаксационной коэрцитивной силы от первого к последующим приближениям с переменным по величине и знаку шагом, определяемым по результатам измерения стандартных магнитных характеристик, и автоматического сравнения результатов двух последних измерений. На фиг. 1 представлена функциональная схема предлагаемой полезной модели. На фиг. 2 представлены циклы намагничивания-перемагничивания ферромагнитного образца. Устройство для измерения релаксационных характеристик ферромагнитного материала содержит намагничивающий блок 1, датчик 2 напряженности магнитного поля и измерительную катушку 3, расположенные внутри намагничивающего блока 1, управляемый источник 4 тока, подсоединенный к намагничивающему блоку 1, блок 5 измерения напряженности магнитного поля, вход которого подсоединен к датчику 2 напряженности магнитного поля, блок 6 измерения магнитной индукции, подсоединенный к измерительной катушке 3, блок 7 индикации, блок 8 питания, три компаратора 9, 10 и 11, блок 12 управления, блок 13 хранения информации, блок 14 вычисления, блок 15 вычисления поправки и блок 16 сравнения, причем выход блока 5 измерения напряженности магнитного поля подсоединен к первым входам компараторов 9 и 10 и блока 13 хранения информации, выход блока 6 измерения магнитной индукции подсоединен к первому входу компаратора 11 и второму входу блока 13 хранения информации, второй вход компаратора 9 соединен с первым выходом блока 12 управления, вторые входы компараторов 10 и 11 соединены с нулевым уровнем (землей), выходы компараторов 9, 10 и 11 соединены соответственно с первым, вторым и третьим входами блока 12 управления, второй, третий,четвертый, пятый и шестой выходы блока 12 управления соединены соответственно с третьим входом блока 13 хранения информации, первым входом блока 14 вычисления,первым входом блока 15 вычисления поправки, первым входом блока 16 сравнения и входом управляемого источника 4 тока, четвертый вход и первый, второй, третий и четвертый выходы блока 13 хранения информации подсоединены соответственно к выходу блока 14 вычисления и четвертому входу блока 12 управления, второму входу блока 15 вычисления поправки, второму входу блока 16 сравнения, второму входу блока 14 вычисления и входу блока 7 индикации, третий вход блока 14 вычисления соединен с выходом блока 15 вычисления поправки, а выход блока 16 сравнения соединен с пятым входом блока 12 управления. Питание устройства осуществляется от блока 8 питания. Работает устройство следующим образом. Испытуемый образец (на фиг. 1 не показан) вставляют в измерительную катушку 3 и помещают в намагничивающий блок 1. Блок 12 управления запускает управляемый источник 4 питания, выходной ток которого, проходя через намагничивающий блок 1 намагничивает испытуемый образец по основной кривой намагничивания возрастающим магнитным полем (фиг. 2). Величина этого магнитного поля непрерывно отслеживается блоком 5 измерения напряженности магнитного поля по сигналу, снимаемому с датчика 2 напряженности магнитного поля. При этом в измерительной катушке 3 индуцируется сигнал, который после обработки блоком 6 измерения магнитной индукции пропорционален 4 81602012.04.30 величине магнитной индукции образца. В момент достижения намагничивающим полем максимальной величины , которая задается уровнем сигнала с первого выхода блока 12 управления, срабатывает компаратор 9. Измеряемая в этот момент блоком 6 измерения магнитной индукции величина соответствует магнитной индукциитехнического насыщения. По сигналу с компаратора 9 блок 12 управления разрешает занести ее величину в блок 13 хранения информации. После этого по сигналу с блока 12 управления, поступающему на управляемый источник 4 тока, величина тока через намагничивающий блок 1 начинает уменьшаться и образец перемагничивается по нисходящей ветви петли магнитного гистерезиса убывающим до нуля магнитным полем. В момент равенства этого поля нулю срабатывает компаратор 10. Измеряемая в этот момент блоком 6 измерения магнитной индукции величина соответствует остаточной магнитной индукции . По сигналу с компаратора 10 блок 12 управления разрешает занести ее величину в блок 13 хранения информации. Далее, по сигналу с блока 12 управления изменяется полярность и начинает возрастать ток от управляемого источника 4 тока. Аналогично ведет себя и магнитное поле, создаваемое намагничивающим блоком 1. При таком изменении перемагничивающего поля магнитная индукция испытуемого образца уменьшается. В момент равенства магнитной индукции нулю срабатывает компаратор 11. Измеряемая в этот момент блоком 5 измерения напряженности магнитного поля величина соответствует коэрцитивной силеиспытуемого образца. По сигналу с компаратора 11 блок 12 управления разрешает занести ее величину в блок 13 хранения информации. После этого по сигналу с блока 12 управления ток управляемого источника 4 тока, а следовательно, и магнитное поле, создаваемое намагничивающим блоком 1, уменьшаются до нуля. В этот момент срабатывает компаратор 10. Измеряемая в этот момент блоком 6 измерения магнитной индукции величина соответствует остаточной магнитной индукции по кривой возврата. По сигналу с компаратора 10 блок 12 управления разрешает занести ее величину в блок 13 хранения информации. После этого по сигналу с блока 12 управления блок 14 вычисления определяет первое приближение величины релаксационной коэрцитивной силы 1 по алгоритму 11/(2). Эта величина записывается в блок 13 хранения информации и в блок 12 управления, который устанавливает порог срабатывания компаратора 9, пропорциональный величине 1. После этого блок 12 управления запускает режим работы управляемого источника 4 тока, при котором испытуемый образец последовательно намагничивается в исходной полярности возрастающим магнитным полем намагничивающего блока 1 до состояния технического насыщения, перемагничивается по нисходящей ветви петли магнитного гистерезиса убывающим до нуля магнитным полем, а затем возрастающим по абсолютной величине магнитным полем противоположной полярности до значения 1 (фиг. 2). В этот момент срабатывает компаратор 9. Измеряемая при этом блоком 5 измерения напряженности магнитного поля величина соответствует первому приближению релаксационной коэрцитивной силы 1, а измеряемая блоком 6 измерения магнитной индукции величина соответствует первому приближению релаксационной магнитной индукции 1. По сигналу с компаратора 9 блок 12 управления разрешает занести величины 1 и 1 в блок 13 хранения информации. После этого по сигналу с блока 12 управления ток управляемого источника 4 тока и магнитное поле в намагничивающем блоке 1 уменьшаются до нуля. В этот момент срабатывает компаратор 10. Измеряемая при этом блоком 6 измерения магнитной индукции величина соответствует остаточной магнитной индукции по кривой возврата. По сигналу с компаратора 10 1 блок 12 управления разрешает занести ее величину в блок 13 хранения информации. Если 0 , то информация о величине 1, равной релаксационной коэрцитивной силе , и 1 величине 1, равной релаксационной намагниченности , переписывается в блок 7 5 81602012.04.30 индикации. Если 0 , то по сигналу с блока 12 управления в блок 15 вычисления по 1 правки переписываются величины 1, ,и, который определяет поправку 1 110 /(21 /), поступающую в блок 14 вычисления со знаком , если 0 , и со знаком , если 0 , который определяет второе приближение релакса 1 1 ционной коэрцитивной силы по алгоритму 211 . По сигналу с блока 12 управления в блок 14 вычисления величина 2 записывается в блок 13 хранения информации и в блок 12 управления, который устанавливает порог срабатывания компаратора 9, пропорциональный величине 2. После этого блок 12 управления запускает режим работы управляемого источника 4 тока, при котором испытуемый образец последовательно намагничивается в исходной полярности возрастающим магнитным полем намагничивающего блока 1 до состояния технического насыщения, перемагничивается по нисходящей ветви петли магнитного гистерезиса убывающим до нуля магнитным полем, а затем возрастающим по абсолютной величине магнитным полем противоположной полярности до значения 2 (фиг. 2). В этот момент срабатывает компаратор 9. Измеряемая при этом блоком 5 измерения напряженности магнитного поля величина соответствует второму приближению релаксационной коэрцитивной силы 2, а измеряемая блоком 6 измерения магнитной индукции величина соответствует второму приближению релаксационной магнитной индукции 2. По сигналу с компаратора 9 блок 12 управления разрешает занести величины 2 и 2 в блок 13 хранения информации. В противном случае по сигналу с блока 12 управления магнитное поле в намагничивающем блоке 1 уменьшается до нуля. В этот момент срабатывает компаратор 10. Измеряемая при этом блоком 6 измерения магнитной индукции величина соответствует остаточной магнитной индукции по кривой возврата 2 . Затем по сигналу с блока 12 управления хранящиеся в блоке 13 хранения величины 1 и 2 переписываются в блок 16 сравнения, где по алгоритму (21 ) /1 определяется погрешность измерения релаксационной коэрцитивной силы. По этому же сигналу в блок 16 сравнения из блока 12 управления переписывается величина допустимой погрешности. Если величина рассчитанной погрешности окажется меньше заданной и знаки 1 и 2 противоположны, то величина 2 принимается равной релаксационной коэрцитивной силе , а величина 2 при этом поле - релаксационной намагниченностии по сигналу с блока 12 управления блок 13 хранения информации переписывает эти величины в блок 7 индикации. По сигналу с компаратора 10 блок 12 управления разрешает занести ее величину в блок 13 хранения информации, а затем переписать из этого блока величины 2, 1,и 2 в блок 15 вычисления поправки, который определяет поправку 221 /(22 /), поступающую в блок 14 вычисления со знаком , если 20 , и со знаком , если 20 , который определяет третье приближение релаксационной коэрцитивной силы по алгоритму 321 . По сигналу с блока 12 управления блок 14 величина 3 записывается в блок 13 хранения информации и в блок 12 управления, который устанавливает порог срабатывания компаратора 9, пропорциональный величине 3. После этого блок 12 управления запускает режим работы управляемого источника 4 тока, при котором испытуемый образец последовательно намагничивается в исходной полярности возрастающим магнитным полем намагничивающего блока 1 до состояния технического насыщения, перемагничивается по нисходящей ветви петли магнитного гистерезиса убывающим до нуля магнитным полем, а затем возрастающим по абсолютной величине магнитным полем противоположной полярности до значения 3. 6 81602012.04.30 В этот момент срабатывает компаратор 9. Измеряемая при этом блоком 5 измерения напряженности магнитного поля величина соответствует третьему приближению релаксационной коэрцитивной силы 3, а измеряемая блоком 6 измерения магнитной индукции величина соответствует третьему приближению релаксационной магнитной индукции 3. По сигналу с компаратора 9 блок 12 управления разрешает занести величины 3 и 3 блок 13 хранения информации. Затем по сигналу с блока 12 управления хранящиеся в блоке 13 хранения величины 2 и 3 переписываются в блок 16 сравнения, где по алгоритму (32 ) /2 определяется погрешность определения релаксационной коэрцитивной силы. Если величина рассчитанной погрешности окажется меньше заданной, то величина 3 принимается равной релаксационной коэрцитивной силе , а величина 3 при этом поле - релаксационной намагниченностии по сигналу с блока 12 управления блок 14 переписывает эти величины в блок 7 индикации. В противном случае по сигналу с блока 12 циклы намагничивание-перемагничивание образца до достижения магнитным полем намагничивающего блока 1 по абсолютной величине значения (1)-го приближения релаксационной коэрцитивной силы( 1), где(1) /(2/) продолжаются до тех пор, пока величина ((1)) /не станет меньше заданной. При этом величина (1) принимается равной релаксационной коэрцитивной силе , а соответствующая ей величина (1) - равной релаксационной индукции . Обе эти величины выводятся на блок 9 индикации. Эффективность предлагаемой модели обусловлена тем, что величина релаксационной коэрцитивной силы и соответствующая ей величина релаксационной намагниченности измеряются путем последовательного приближения от первого приближения, определяемого по результатам измерений стандартных магнитных характеристик, к истинному значению с автоматически изменяемым по величине и знаку шагом, определяемым также по результатам измерений стандартных магнитных характеристик. Поэтому в отличие от прототипа, где шаг приближения постоянен, время измерения по данной полезной модели значительно ниже, а погрешность измерения релаксационной коэрцитивной силы определяется только разрешающей способностью измерения магнитной индукции в области,близкой к нулю, и точностью измерения напряженности магнитного поля. По прототипу эта точность определяется не только погрешностью измерения напряженности и намагниченности образца, но и величиной шага приближения. Техническим результатом осуществления предлагаемой полезной модели является повышение производительности и точности измерения релаксационной коэрцитивной силы и релаксационной намагниченности. Так, для образца с 1,9 Тл,1,2 Тл,710 А/м и 0,093 Тл, по прототипу 750 А/м,0,16 Тл, а по предлагаемому способу 735 А/м,0,1 Тл. Так как погрешность измерения напряженности магнитного поля и магнитной индукции в обоих случаях одинакова, то дополнительная погрешность измерения по прототипу составляет 2 по релаксационной коэрцитивной силе и 58 по релаксационной намагниченности. Кроме того, для достижения требуемой точности по прототипу требуется большее число циклов намагничивание-перемагничивание, что увеличивает время измерения, то есть снижает производительность измерений. Так, при требуемой точности 1 по прототипу требуется 4 цикла, а поданной модели - 2. При требуемой точности 0,1 число циклов составляет соответственно 34 и 7. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01R 33/14
Метки: ферромагнитного, материала, релаксационных, измерения, устройство, характеристик
Код ссылки
<a href="https://by.patents.su/8-u8160-ustrojjstvo-dlya-izmereniya-relaksacionnyh-harakteristik-ferromagnitnogo-materiala.html" rel="bookmark" title="База патентов Беларуси">Устройство для измерения релаксационных характеристик ферромагнитного материала</a>
Способ определения магнитных характеристик изделия из ферромагнитного материала

Номер патента: 10534
Опубликовано: 30.04.2008
Авторы: Осипов Александр Александрович, Матюк Владимир Федорович
МПК: G01R 33/12, G01N 27/72
Метки: ферромагнитного, характеристик, магнитных, материала, определения, изделия, способ
Текст:
...сигнала 1. Включают низкочастотное магнитное поле, запоминают изменение напряженностиэтого поля во времени, одновременно интегрируют ЭДС индукции измерительной катушки и запоминают зависимость от времени проинтегрированного сигнала 2. Выключают магнитное поле, интегрируют ЭДС индукции измерительной катушки и запоминают зависимость от времени проинтегрированного сигнала 3. Время интегрирования на всех трех этапах выдерживают равным времени...
Устройство для измерения магнитных характеристик ферромагнитных материалов
Номер патента: U 3195
Опубликовано: 30.12.2006
Авторы: Матюк Владимир Федорович, Осипов Александр Александрович
МПК: G01R 33/00
Метки: материалов, устройство, измерения, магнитных, ферромагнитных, характеристик
Текст:
...в одну из которых помещается исследуемый образец, и блок управления интегратором, а к его выходу Через аналого-цифровой преобразователь канала измерения индукции магнитного поля вход блока регистрации сигнала В 1 до включения намагничивающего поля, вход блока регистрации сигнала В 2 в процессе действия намагничивающего поля и вход блока регистрации сигнала В 3 после выключения намагничивающего поля, причем выходы блоков регистрации сигналов...
Способ построения петли магнитного гистерезиса ферромагнитного образца для определения его магнитных характеристик
Номер патента: 9298
Опубликовано: 30.06.2007
Авторы: Матюк Владимир Федорович, Осипов Александр Александрович
МПК: G01R 33/14, G01R 33/16
Метки: гистерезиса, магнитного, образца, магнитных, построения, петли, характеристик, ферромагнитного, способ, определения
Текст:
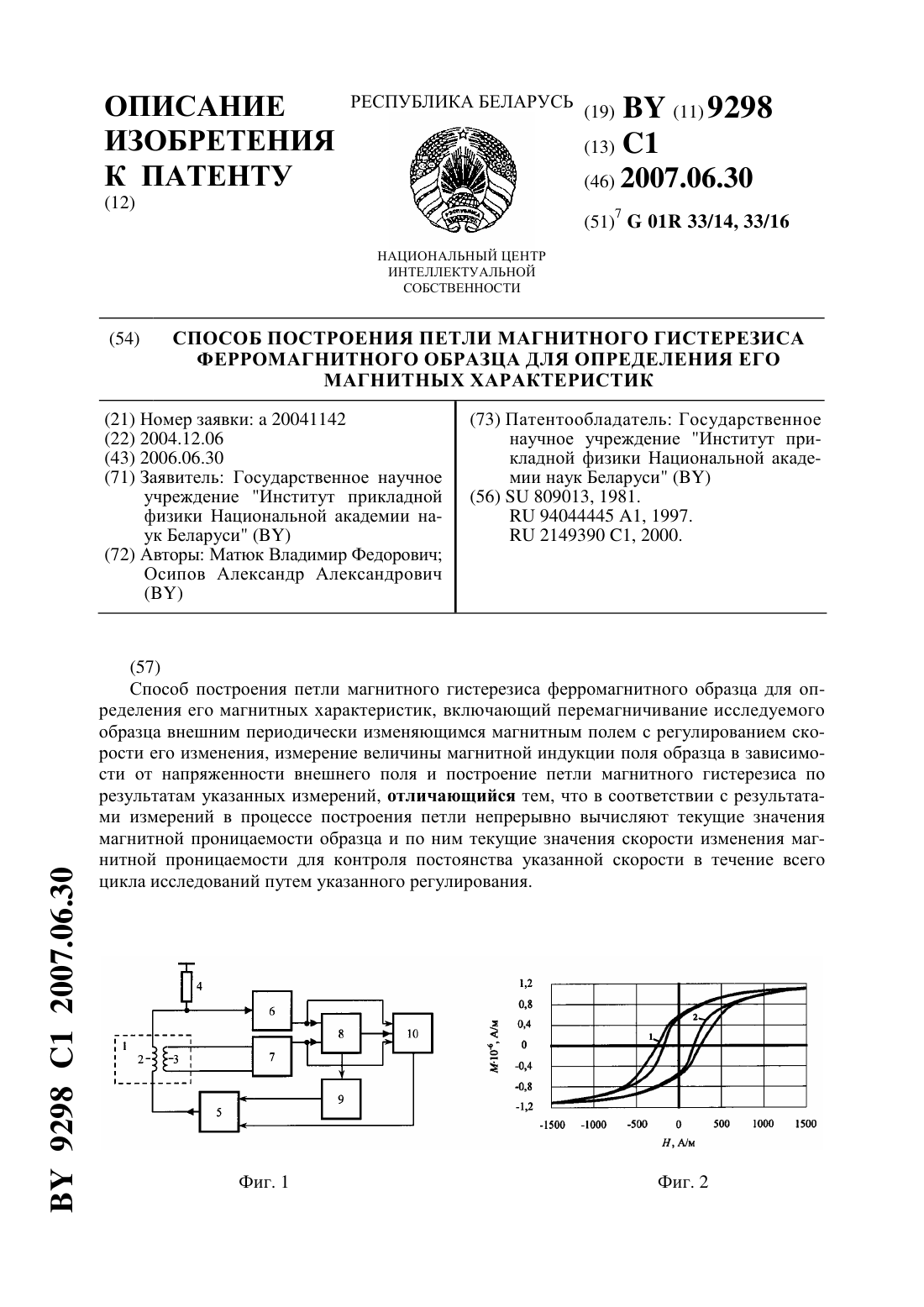
...образец перемагничивают внешним периодически изменяющимся магнитным полем с регулированием скорости его изменения, измеряют величины магнитной индукции образца в зависимости от напряженности внешнего поля и по результатам указанных измерений строят петлю магнитного гистерезиса, в соответствии с результатами измерений в процессе построения петли непрерывно вычисляют текущие значения магнитной проницаемости образца и по ним 2 9298 1 2007.06.30...
Способ определения остаточной намагниченности ферромагнитного материала изделия
Номер патента: 14963
Опубликовано: 30.10.2011
Автор: Сандомирский Сергей Григорьевич
МПК: G01R 33/12
Метки: ферромагнитного, определения, материала, остаточной, изделия, намагниченности, способ
Текст:
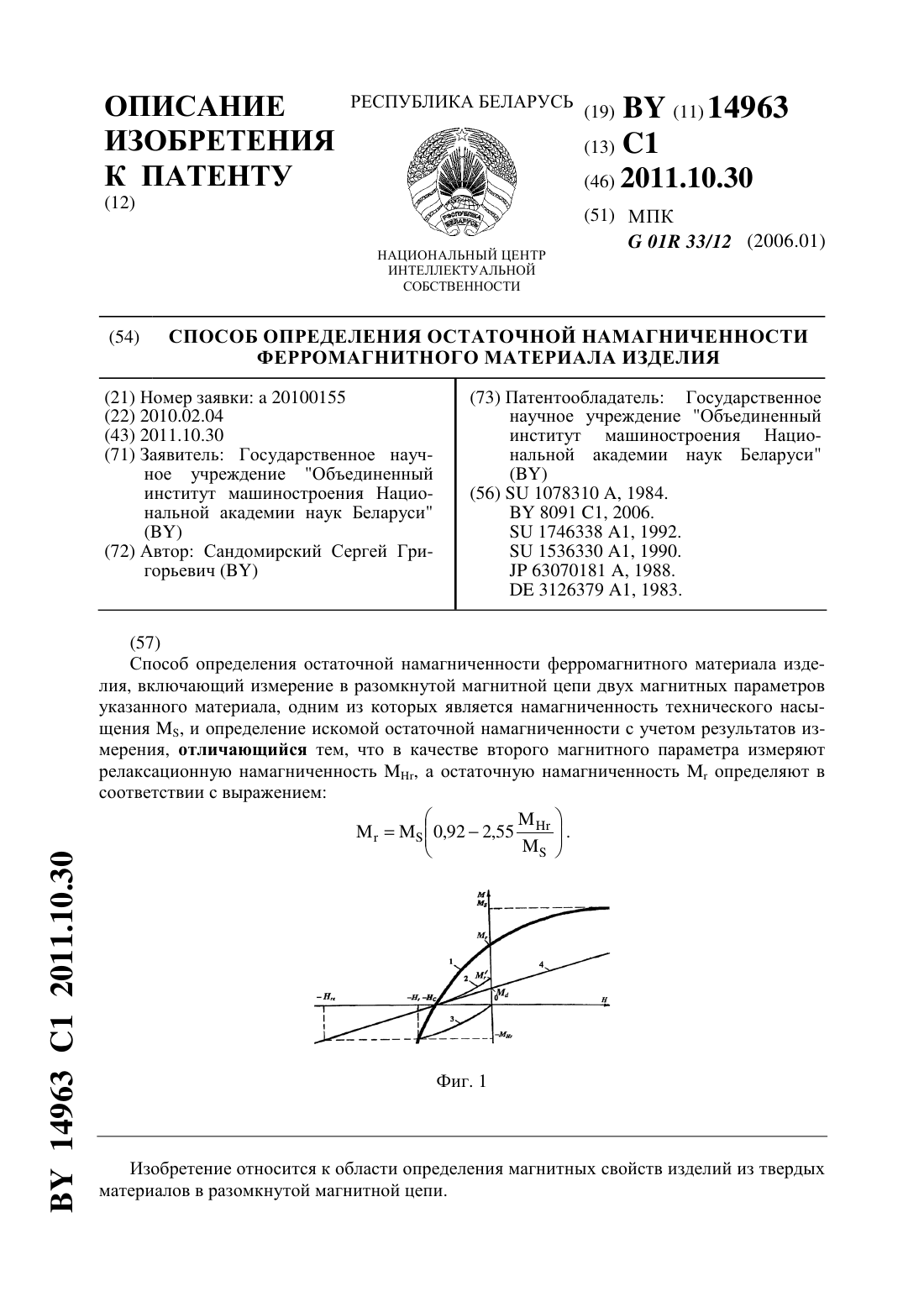
...Задача решена в способе определения остаточной намагниченности ферромагнитного материала изделия, включающем измерение в разомкнутой магнитной цепи намагниченности технического насыщенияи релаксационной намагниченностии определение остаточной намагниченностив соответствии с выражением Повышение точности определения остаточной намагниченности ферромагнитного материала изделия в разомкнутой магнитной цепи достигается благодаря тому, что...
Устройство для измерения шумовых и вибрационных характеристик
Номер патента: U 5993
Опубликовано: 28.02.2010
Авторы: Докукова Наталия Анатольевна, Кафтайкина Екатерина Николаевна
МПК: G01H 11/00
Метки: характеристик, измерения, шумовых, вибрационных, устройство
Текст:
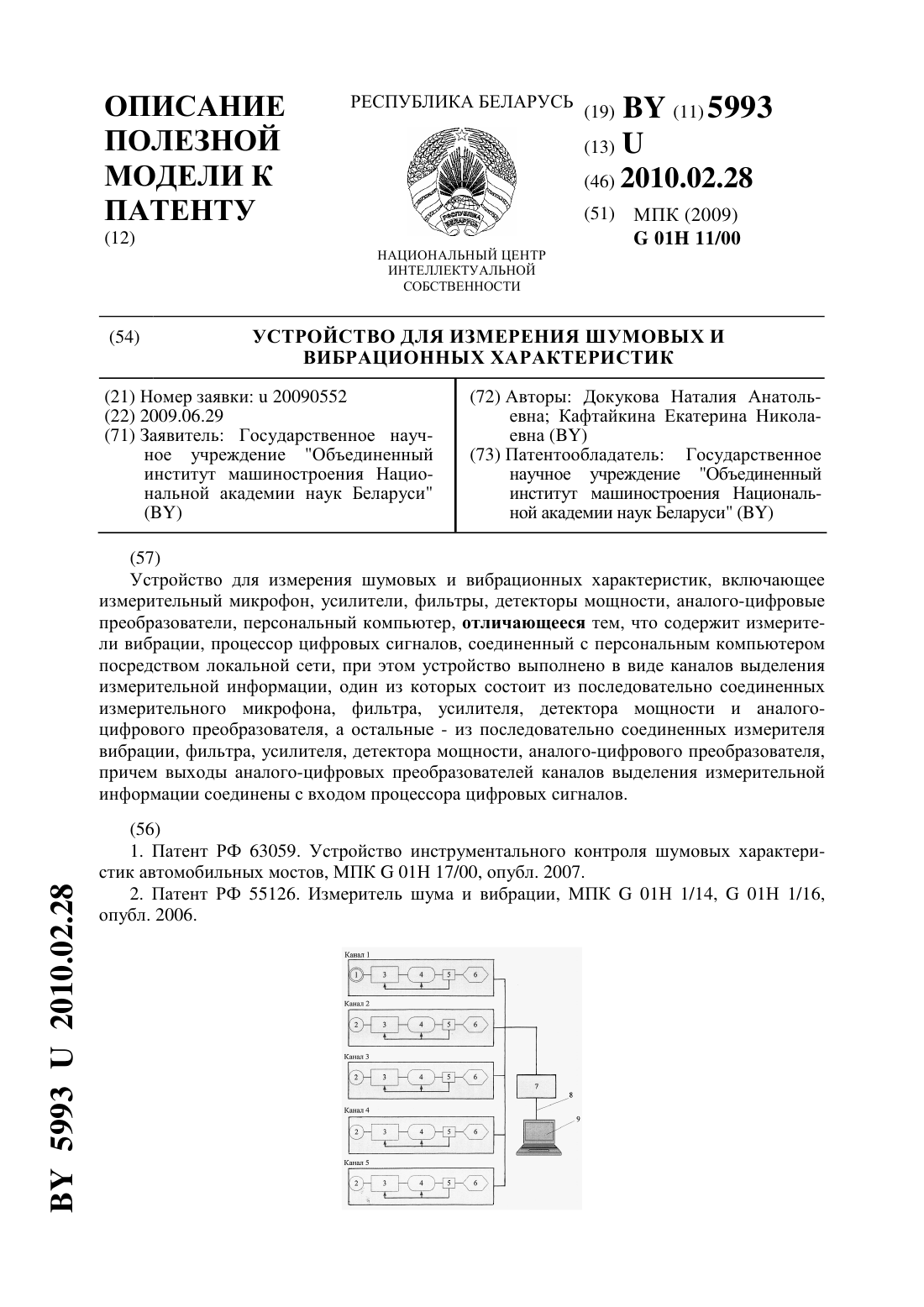
...вибрации в режиме реального времени, их обработку и хранение с целью последующего сравнения и анализа, а также создание базы данных измеряемых характеристик в виде электронного каталога. Задача решается за счет того, что устройство, содержащее измерительный микрофон,усилители, фильтры, детекторы мощности, аналого-цифровые преобразователи, персональный компьютер, согласно техническому решению, содержит измерители вибрации,процессор цифровых...
Предыдущий патент: Вафельное изделие
Следующий патент: Устройство для соединения многожильного кабеля с внешним объектом
Случайный патент: Способ производства аммиачной воды