Способ определения магнитных характеристик изделия из ферромагнитного материала
Номер патента: 10534
Опубликовано: 30.04.2008
Авторы: Матюк Владимир Федорович, Осипов Александр Александрович

Текст
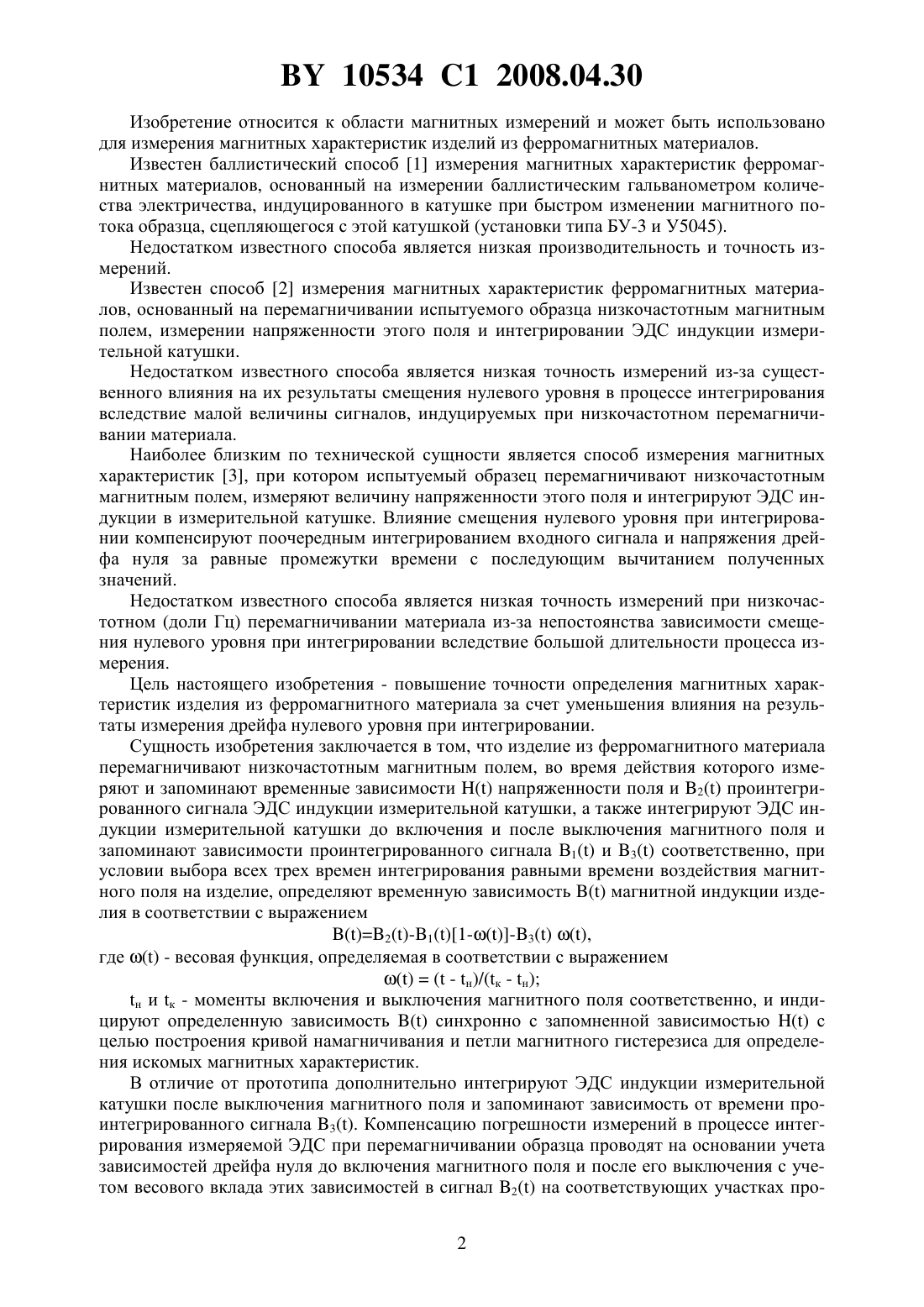
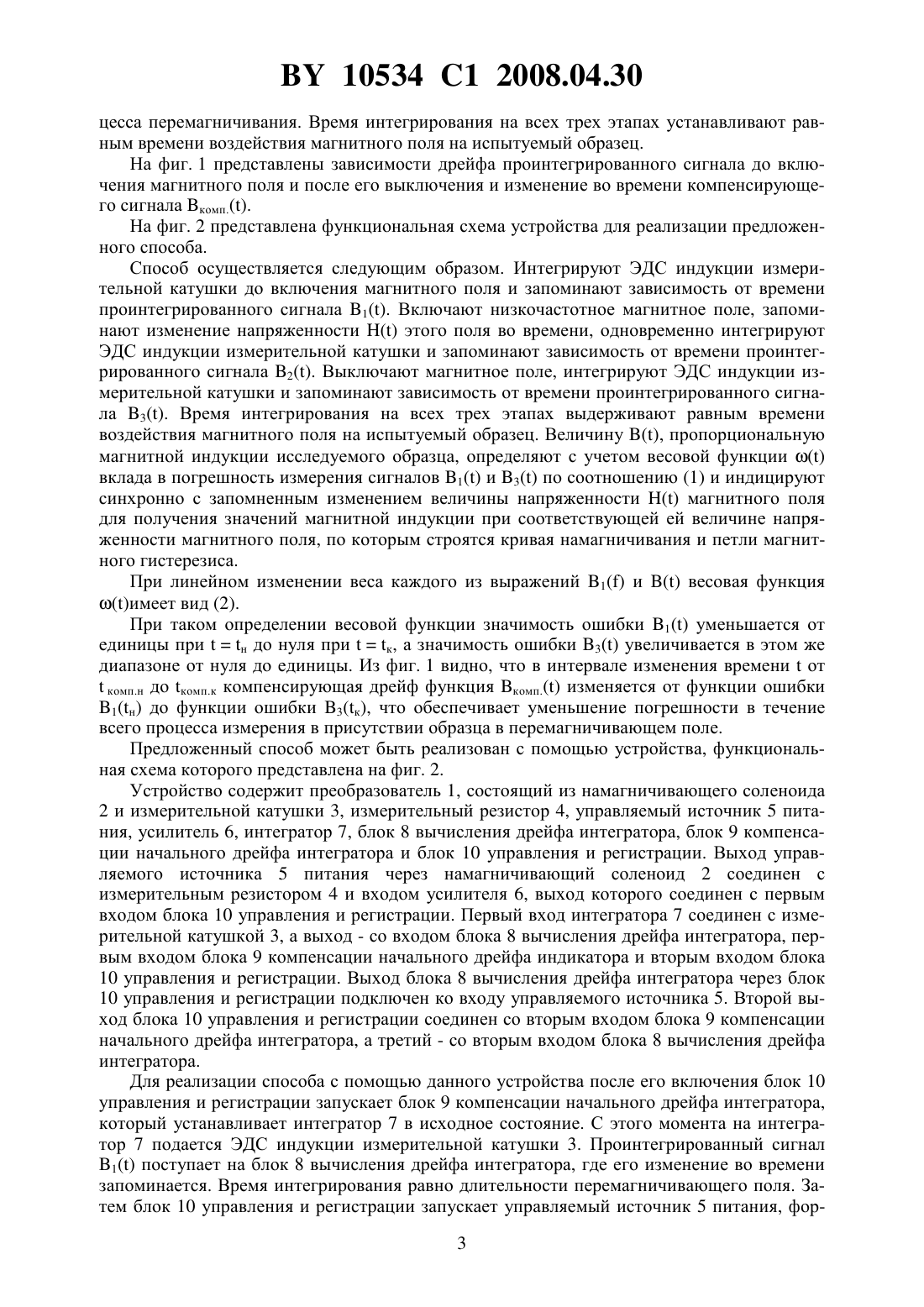
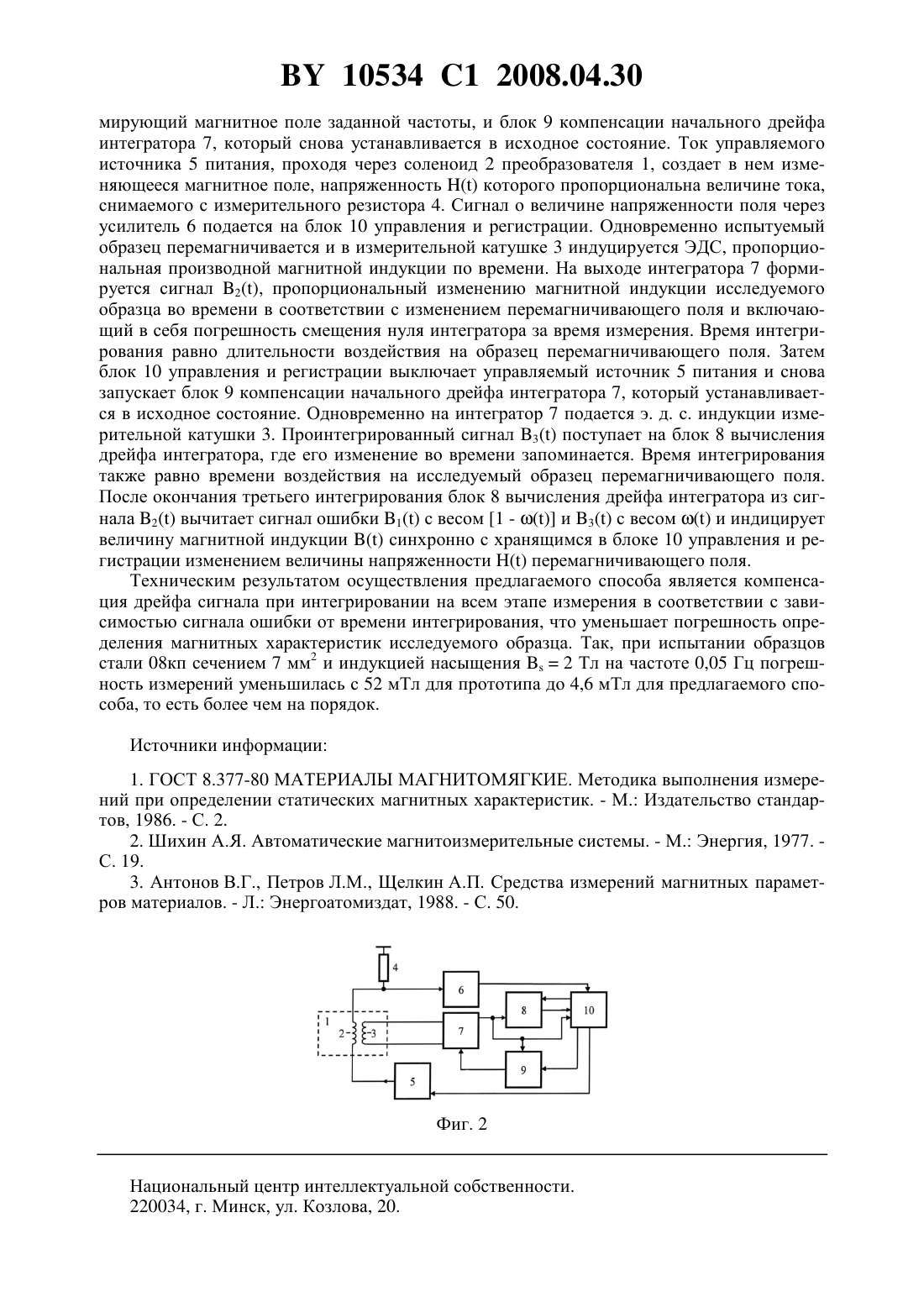
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ ИЗ ФЕРРОМАГНИТНОГО МАТЕРИАЛА(71) Заявитель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(72) Авторы Матюк Владимир Федорович Осипов Александр Александрович(73) Патентообладатель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(56) Антонов В.Г. Средства измерений магнитных параметров материалов. - Л. Энергоатомиздат, 1986. - С. 50.6650113 2, 2003.(57) Способ определения магнитных характеристик изделия из ферромагнитного материала, включающий перемагничивание изделия низкочастотным магнитным полем, во время воздействия которого измеряют и запоминают временные зависимостинапряженности поля и 2 проинтегрированного сигнала ЭДС индукции измерительной катушки, а также интегрирование ЭДС индукции измерительной катушки до включения и после выключения магнитного поля с запоминанием временных зависимостей проинтегрированного сигнала 1 и 3 соответственно, при условии выбора всех трех времен интегрирования равными времени воздействия магнитного поля на изделие, определение временной зависимостимагнитной индукции изделия в соответствии с выражением( - н)/(к - н) н и к - моменты включения и выключения магнитного поля соответственно,и индицирование определенной зависимостисинхронно с запомненной зависимостьюс целью построения кривой намагничивания и петли магнитного гистерезиса для определения искомых магнитных характеристик. 10534 1 2008.04.30 Изобретение относится к области магнитных измерений и может быть использовано для измерения магнитных характеристик изделий из ферромагнитных материалов. Известен баллистический способ 1 измерения магнитных характеристик ферромагнитных материалов, основанный на измерении баллистическим гальванометром количества электричества, индуцированного в катушке при быстром изменении магнитного потока образца, сцепляющегося с этой катушкой (установки типа БУ-3 и У 5045). Недостатком известного способа является низкая производительность и точность измерений. Известен способ 2 измерения магнитных характеристик ферромагнитных материалов, основанный на перемагничивании испытуемого образца низкочастотным магнитным полем, измерении напряженности этого поля и интегрировании ЭДС индукции измерительной катушки. Недостатком известного способа является низкая точность измерений из-за существенного влияния на их результаты смещения нулевого уровня в процессе интегрирования вследствие малой величины сигналов, индуцируемых при низкочастотном перемагничивании материала. Наиболее близким по технической сущности является способ измерения магнитных характеристик 3, при котором испытуемый образец перемагничивают низкочастотным магнитным полем, измеряют величину напряженности этого поля и интегрируют ЭДС индукции в измерительной катушке. Влияние смещения нулевого уровня при интегрировании компенсируют поочередным интегрированием входного сигнала и напряжения дрейфа нуля за равные промежутки времени с последующим вычитанием полученных значений. Недостатком известного способа является низкая точность измерений при низкочастотном (доли Гц) перемагничивании материала из-за непостоянства зависимости смещения нулевого уровня при интегрировании вследствие большой длительности процесса измерения. Цель настоящего изобретения - повышение точности определения магнитных характеристик изделия из ферромагнитного материала за счет уменьшения влияния на результаты измерения дрейфа нулевого уровня при интегрировании. Сущность изобретения заключается в том, что изделие из ферромагнитного материала перемагничивают низкочастотным магнитным полем, во время действия которого измеряют и запоминают временные зависимостинапряженности поля и 2 проинтегрированного сигнала ЭДС индукции измерительной катушки, а также интегрируют ЭДС индукции измерительной катушки до включения и после выключения магнитного поля и запоминают зависимости проинтегрированного сигнала В 1 и 3 соответственно, при условии выбора всех трех времен интегрирования равными времени воздействия магнитного поля на изделие, определяют временную зависимостьмагнитной индукции изделия в соответствии с выражением( - н)/(к - н) н и к - моменты включения и выключения магнитного поля соответственно, и индицируют определенную зависимостьсинхронно с запомненной зависимостьюс целью построения кривой намагничивания и петли магнитного гистерезиса для определения искомых магнитных характеристик. В отличие от прототипа дополнительно интегрируют ЭДС индукции измерительной катушки после выключения магнитного поля и запоминают зависимость от времени проинтегрированного сигнала 3. Компенсацию погрешности измерений в процессе интегрирования измеряемой ЭДС при перемагничивании образца проводят на основании учета зависимостей дрейфа нуля до включения магнитного поля и после его выключения с учетом весового вклада этих зависимостей в сигнал 2 на соответствующих участках про 2 10534 1 2008.04.30 цесса перемагничивания. Время интегрирования на всех трех этапах устанавливают равным времени воздействия магнитного поля на испытуемый образец. На фиг. 1 представлены зависимости дрейфа проинтегрированного сигнала до включения магнитного поля и после его выключения и изменение во времени компенсирующего сигнала комп На фиг. 2 представлена функциональная схема устройства для реализации предложенного способа. Способ осуществляется следующим образом. Интегрируют ЭДС индукции измерительной катушки до включения магнитного поля и запоминают зависимость от времени проинтегрированного сигнала 1. Включают низкочастотное магнитное поле, запоминают изменение напряженностиэтого поля во времени, одновременно интегрируют ЭДС индукции измерительной катушки и запоминают зависимость от времени проинтегрированного сигнала 2. Выключают магнитное поле, интегрируют ЭДС индукции измерительной катушки и запоминают зависимость от времени проинтегрированного сигнала 3. Время интегрирования на всех трех этапах выдерживают равным времени воздействия магнитного поля на испытуемый образец. Величину , пропорциональную магнитной индукции исследуемого образца, определяют с учетом весовой функциивклада в погрешность измерения сигналов 1 и 3 по соотношению (1) и индицируют синхронно с запомненным изменением величины напряженностимагнитного поля для получения значений магнитной индукции при соответствующей ей величине напряженности магнитного поля, по которым строятся кривая намагничивания и петли магнитного гистерезиса. При линейном изменении веса каждого из выражений 1 ивесовая функция имеет вид (2). При таком определении весовой функции значимость ошибки 1 уменьшается от единицы прин до нуля прик, а значимость ошибки 3 увеличивается в этом же диапазоне от нуля до единицы. Из фиг. 1 видно, что в интервале изменения времениоткомп.н до комп.к компенсирующая дрейф функция комп. изменяется от функции ошибки 1(н) до функции ошибки 3(к), что обеспечивает уменьшение погрешности в течение всего процесса измерения в присутствии образца в перемагничивающем поле. Предложенный способ может быть реализован с помощью устройства, функциональная схема которого представлена на фиг. 2. Устройство содержит преобразователь 1, состоящий из намагничивающего соленоида 2 и измерительной катушки 3, измерительный резистор 4, управляемый источник 5 питания, усилитель 6, интегратор 7, блок 8 вычисления дрейфа интегратора, блок 9 компенсации начального дрейфа интегратора и блок 10 управления и регистрации. Выход управляемого источника 5 питания через намагничивающий соленоид 2 соединен с измерительным резистором 4 и входом усилителя 6, выход которого соединен с первым входом блока 10 управления и регистрации. Первый вход интегратора 7 соединен с измерительной катушкой 3, а выход - со входом блока 8 вычисления дрейфа интегратора, первым входом блока 9 компенсации начального дрейфа индикатора и вторым входом блока 10 управления и регистрации. Выход блока 8 вычисления дрейфа интегратора через блок 10 управления и регистрации подключен ко входу управляемого источника 5. Второй выход блока 10 управления и регистрации соединен со вторым входом блока 9 компенсации начального дрейфа интегратора, а третий - со вторым входом блока 8 вычисления дрейфа интегратора. Для реализации способа с помощью данного устройства после его включения блок 10 управления и регистрации запускает блок 9 компенсации начального дрейфа интегратора,который устанавливает интегратор 7 в исходное состояние. С этого момента на интегратор 7 подается ЭДС индукции измерительной катушки 3. Проинтегрированный сигнал 1 поступает на блок 8 вычисления дрейфа интегратора, где его изменение во времени запоминается. Время интегрирования равно длительности перемагничивающего поля. Затем блок 10 управления и регистрации запускает управляемый источник 5 питания, фор 3 10534 1 2008.04.30 мирующий магнитное поле заданной частоты, и блок 9 компенсации начального дрейфа интегратора 7, который снова устанавливается в исходное состояние. Ток управляемого источника 5 питания, проходя через соленоид 2 преобразователя 1, создает в нем изменяющееся магнитное поле, напряженностькоторого пропорциональна величине тока,снимаемого с измерительного резистора 4. Сигнал о величине напряженности поля через усилитель 6 подается на блок 10 управления и регистрации. Одновременно испытуемый образец перемагничивается и в измерительной катушке 3 индуцируется ЭДС, пропорциональная производной магнитной индукции по времени. На выходе интегратора 7 формируется сигнал 2, пропорциональный изменению магнитной индукции исследуемого образца во времени в соответствии с изменением перемагничивающего поля и включающий в себя погрешность смещения нуля интегратора за время измерения. Время интегрирования равно длительности воздействия на образец перемагничивающего поля. Затем блок 10 управления и регистрации выключает управляемый источник 5 питания и снова запускает блок 9 компенсации начального дрейфа интегратора 7, который устанавливается в исходное состояние. Одновременно на интегратор 7 подается э. д. с. индукции измерительной катушки 3. Проинтегрированный сигнал 3 поступает на блок 8 вычисления дрейфа интегратора, где его изменение во времени запоминается. Время интегрирования также равно времени воздействия на исследуемый образец перемагничивающего поля. После окончания третьего интегрирования блок 8 вычисления дрейфа интегратора из сигнала 2 вычитает сигнал ошибки 1 с весом 1 -и 3 с весоми индицирует величину магнитной индукциисинхронно с хранящимся в блоке 10 управления и регистрации изменением величины напряженностиперемагничивающего поля. Техническим результатом осуществления предлагаемого способа является компенсация дрейфа сигнала при интегрировании на всем этапе измерения в соответствии с зависимостью сигнала ошибки от времени интегрирования, что уменьшает погрешность определения магнитных характеристик исследуемого образца. Так, при испытании образцов стали 08 кп сечением 7 мм 2 и индукцией насыщения 2 Тл на частоте 0,05 Гц погрешность измерений уменьшилась с 52 мТл для прототипа до 4,6 мТл для предлагаемого способа, то есть более чем на порядок. Источники информации 1. ГОСТ 8.377-80 МАТЕРИАЛЫ МАГНИТОМЯГКИЕ. Методика выполнения измерений при определении статических магнитных характеристик. - М. Издательство стандартов, 1986. - С. 2. 2. Шихин А.Я. Автоматические магнитоизмерительные системы. - М. Энергия, 1977. С. 19. 3. Антонов В.Г., Петров Л.М., Щелкин А.П. Средства измерений магнитных параметров материалов. - Л. Энергоатомиздат, 1988. - С. 50. Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01R 33/12, G01N 27/72
Метки: характеристик, изделия, ферромагнитного, магнитных, определения, материала, способ
Код ссылки
<a href="https://by.patents.su/4-10534-sposob-opredeleniya-magnitnyh-harakteristik-izdeliya-iz-ferromagnitnogo-materiala.html" rel="bookmark" title="База патентов Беларуси">Способ определения магнитных характеристик изделия из ферромагнитного материала</a>
Способ построения петли магнитного гистерезиса ферромагнитного образца для определения его магнитных характеристик
Номер патента: 9298
Опубликовано: 30.06.2007
Авторы: Осипов Александр Александрович, Матюк Владимир Федорович
МПК: G01R 33/14, G01R 33/16
Метки: определения, способ, магнитного, построения, ферромагнитного, гистерезиса, характеристик, образца, магнитных, петли
Текст:
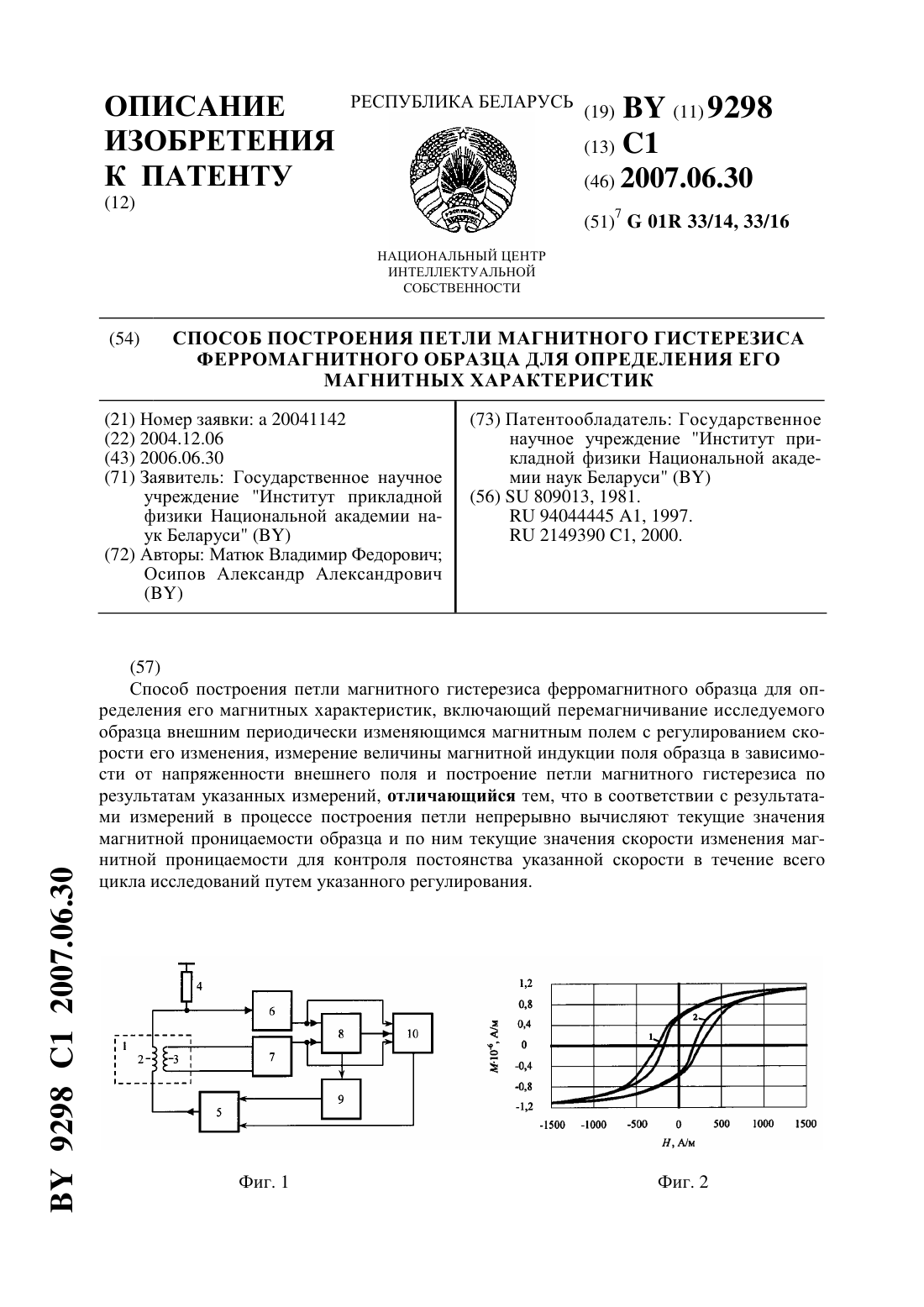
...образец перемагничивают внешним периодически изменяющимся магнитным полем с регулированием скорости его изменения, измеряют величины магнитной индукции образца в зависимости от напряженности внешнего поля и по результатам указанных измерений строят петлю магнитного гистерезиса, в соответствии с результатами измерений в процессе построения петли непрерывно вычисляют текущие значения магнитной проницаемости образца и по ним 2 9298 1 2007.06.30...
Устройство для измерения магнитных характеристик ферромагнитных материалов
Номер патента: U 3195
Опубликовано: 30.12.2006
Авторы: Матюк Владимир Федорович, Осипов Александр Александрович
МПК: G01R 33/00
Метки: характеристик, измерения, материалов, устройство, магнитных, ферромагнитных
Текст:
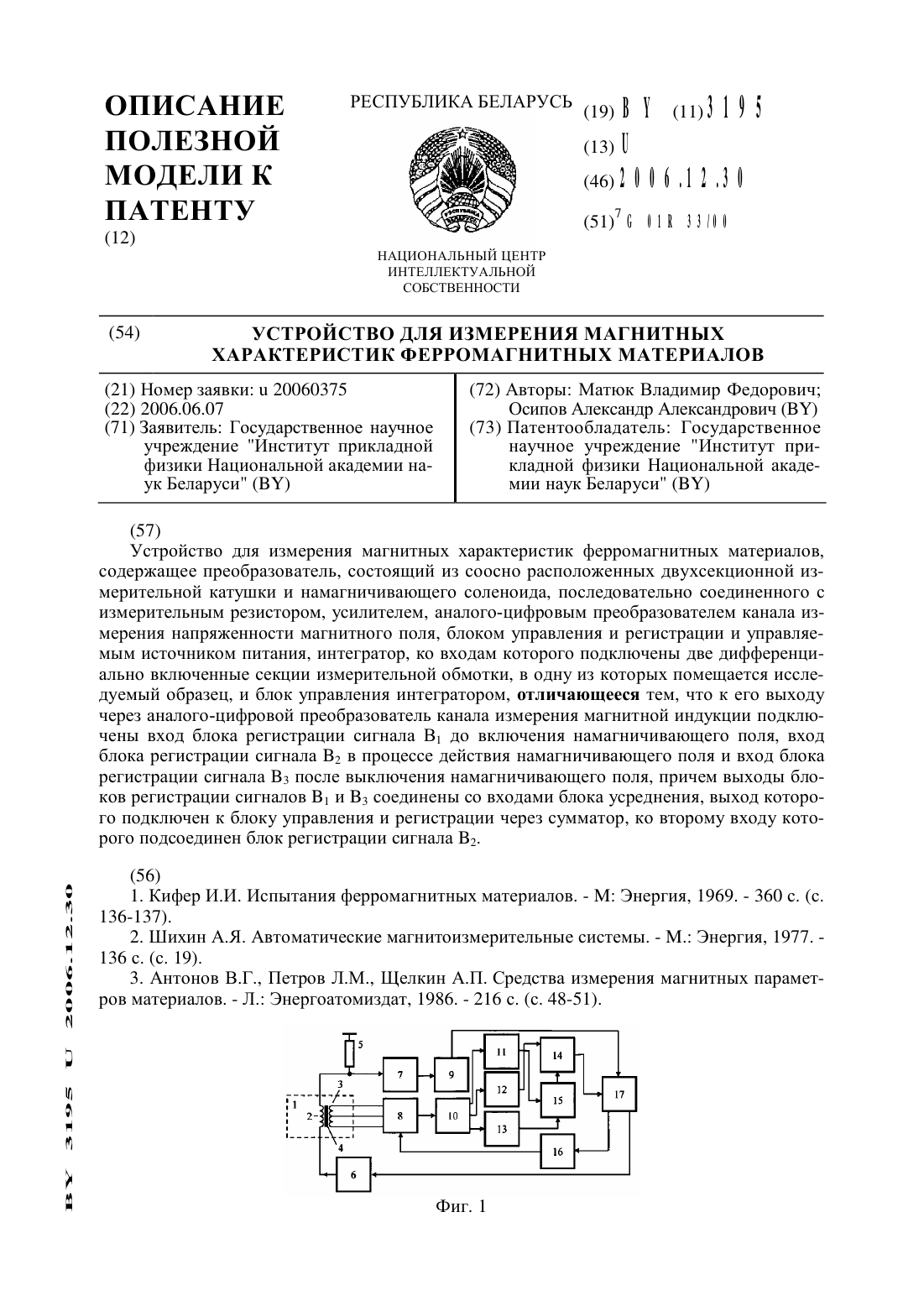
...в одну из которых помещается исследуемый образец, и блок управления интегратором, а к его выходу Через аналого-цифровой преобразователь канала измерения индукции магнитного поля вход блока регистрации сигнала В 1 до включения намагничивающего поля, вход блока регистрации сигнала В 2 в процессе действия намагничивающего поля и вход блока регистрации сигнала В 3 после выключения намагничивающего поля, причем выходы блоков регистрации сигналов...
Способ импульсного магнитного многопараметрового контроля твердости изделия из ферромагнитного материала
Номер патента: 9748
Опубликовано: 30.10.2007
Авторы: Пинчуков Дмитрий Анатольевич, Мельгуй Михаил Александрович, Матюк Владимир Федорович
МПК: G01N 27/80, G01R 33/12
Метки: многопараметрового, способ, ферромагнитного, импульсного, изделия, контроля, материала, магнитного, твердости
Текст:
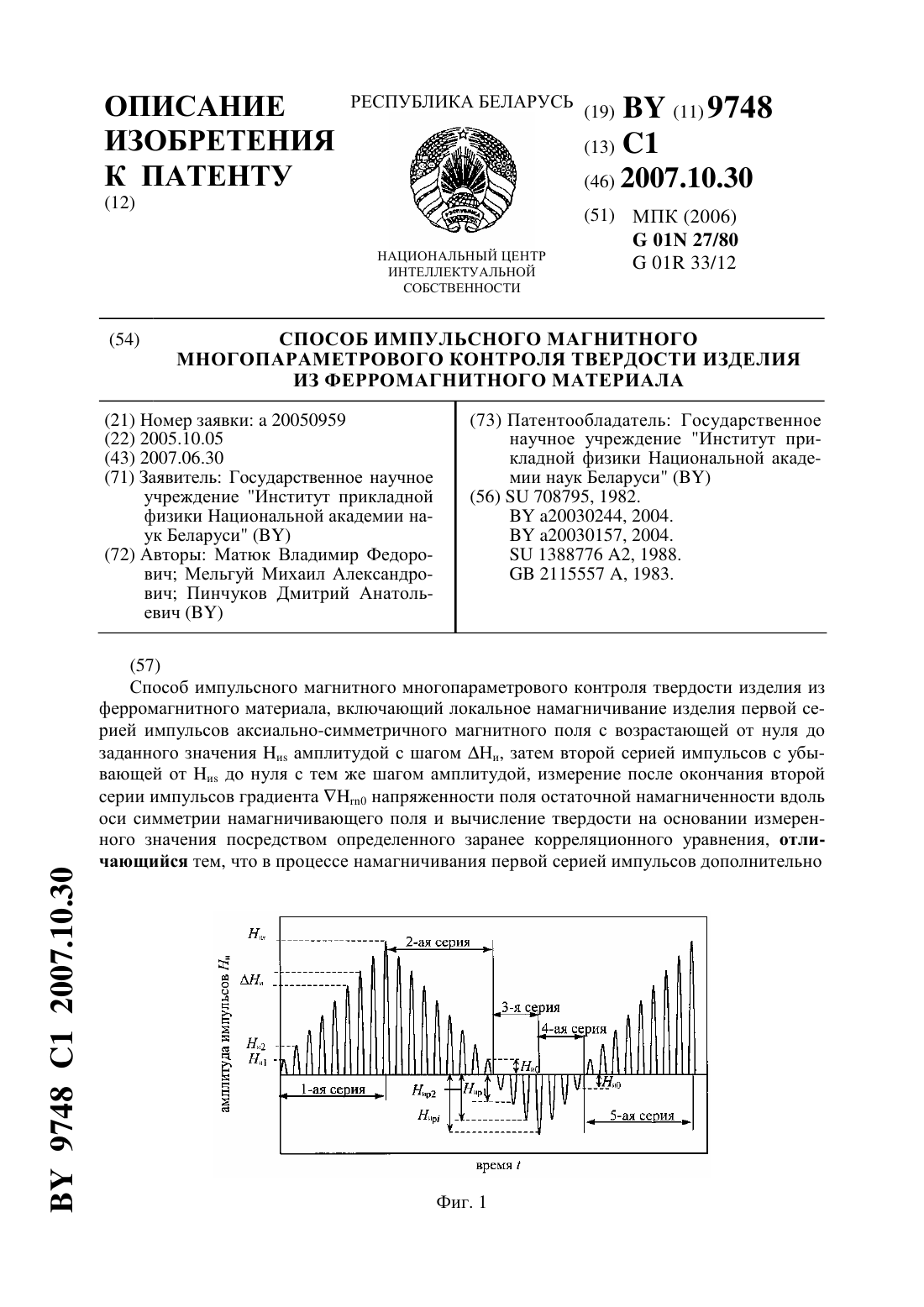
...фиг. 1 показано изменение амплитуды импульсов во времени в первой, второй,третьей, четвертой и пятой сериях импульсов. На фиг. 2 показано изменение величины градиентанормальной составляющей напряженности поля остаточной намагниченности вдоль оси симметрии намагничивающего поля с изменением амплитуды импульсов и измеряемые величины градиента ,и, 0, р, 0, . На фиг. 3 показана одна из возможных структурных схем устройства для реализации...
Способ определения механических характеристик материала при растяжении
Номер патента: 6045
Опубликовано: 30.03.2004
Автор: Шилько Сергей Викторович
Метки: материала, растяжении, характеристик, определения, механических, способ
Текст:
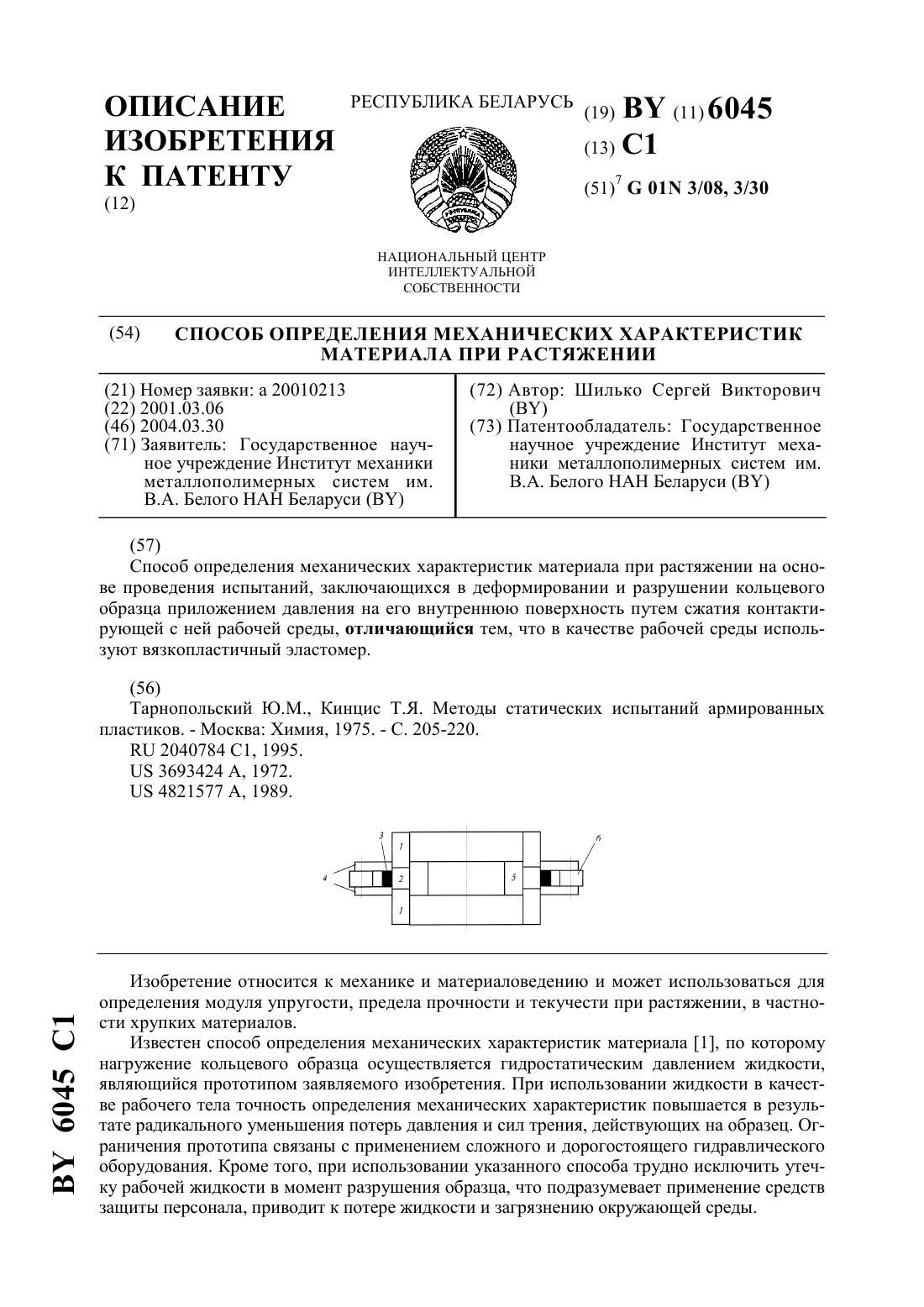
...показана схема нагружения образца при помощи известного устройства 2. В соответствии с рисунком, под действием усилия пресса (на рисунке не показан) происходит сближение колец 1, сжимающих вязкопластичный эластомер 2 в замкнутом объеме, образованном кольцевым образцом 3, наружными дисками 4 и внутренним кольцом 5. Возникающее при сжатии эластомера 2 давление передается на внутреннюю поверхность образца 3. Необходимый зазор между наружными...
Способ электромагнитного контроля физико-механических свойств ферромагнитного изделия, связанных с его магнитными свойствами

Номер патента: 9626
Опубликовано: 30.08.2007
Автор: Сандомирский Сергей Григорьевич
МПК: G01R 33/12, G01N 27/72
Метки: связанных, контроля, способ, магнитными, свойствами, изделия, свойств, электромагнитного, ферромагнитного, физико-механических
Текст:
...способом (кривая 3) от расстояния х между преобразователем и поверхностью контролируемого изделия. На фиг. 2 а приведена функциональная схема (фронтальное сечение) преобразователя,а на фиг. 2 б - функциональная электрическая схема устройства для реализации способа. 4 9626 1 2007.08.30 На фиг. 3 сопоставлены результаты измерения амплитудысигнала высшей гармоники ЭДС преобразователя (кривые 1, 2), амплитудысуммарного сигнала ЭДС...
Предыдущий патент: Коробка передач
Следующий патент: Состав для изготовления древесного пластика