Оптико-электронная система определения координат движущихся объектов
Номер патента: U 2885
Опубликовано: 30.06.2006
Авторы: Пуляев Евгений Михайлович, Новиченков Владимир Юрьевич, Кудряшов Александр Алексеевич, Красовская Марина Григорьевна, Корнейчик Василий Леонидович
Текст
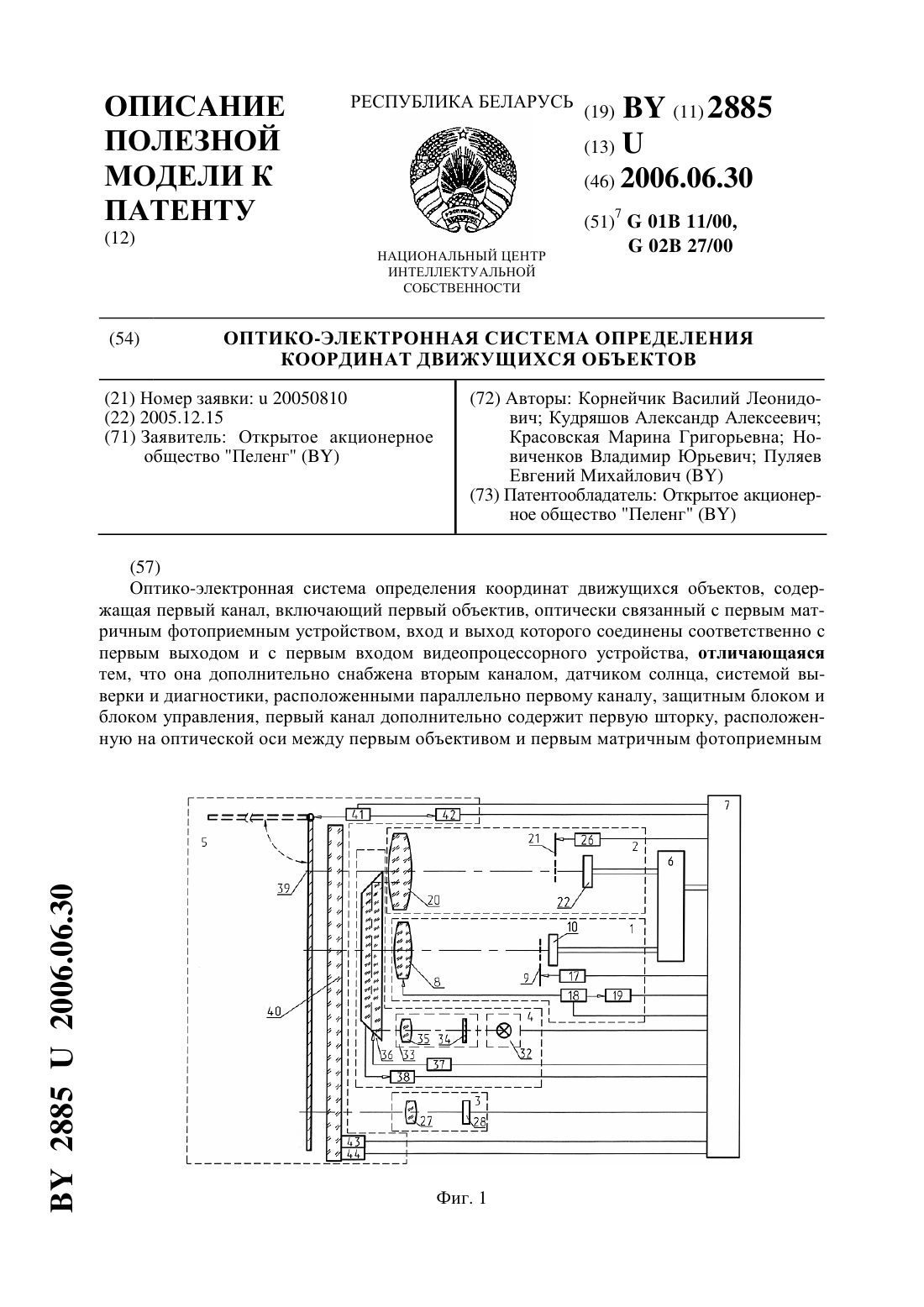
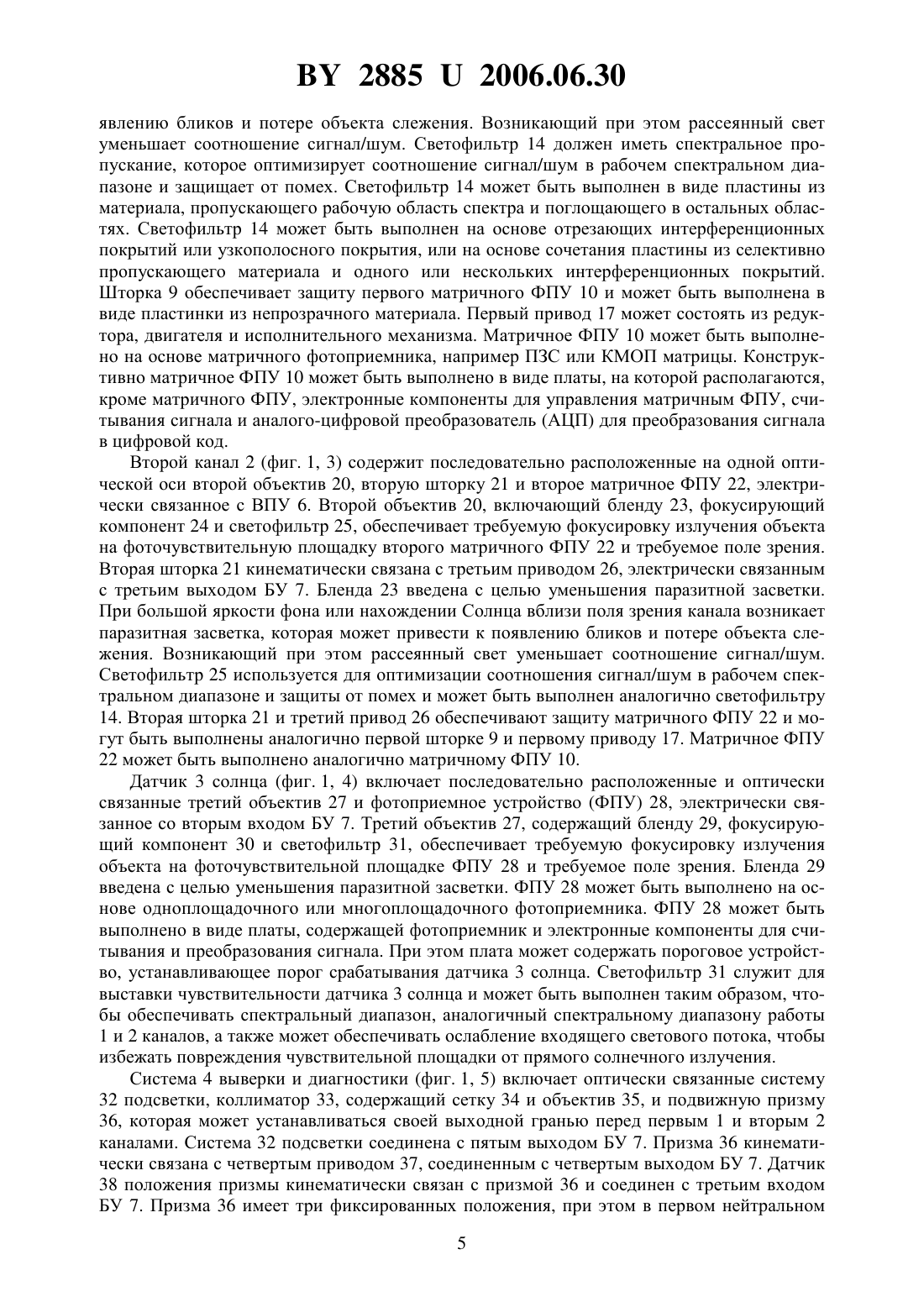
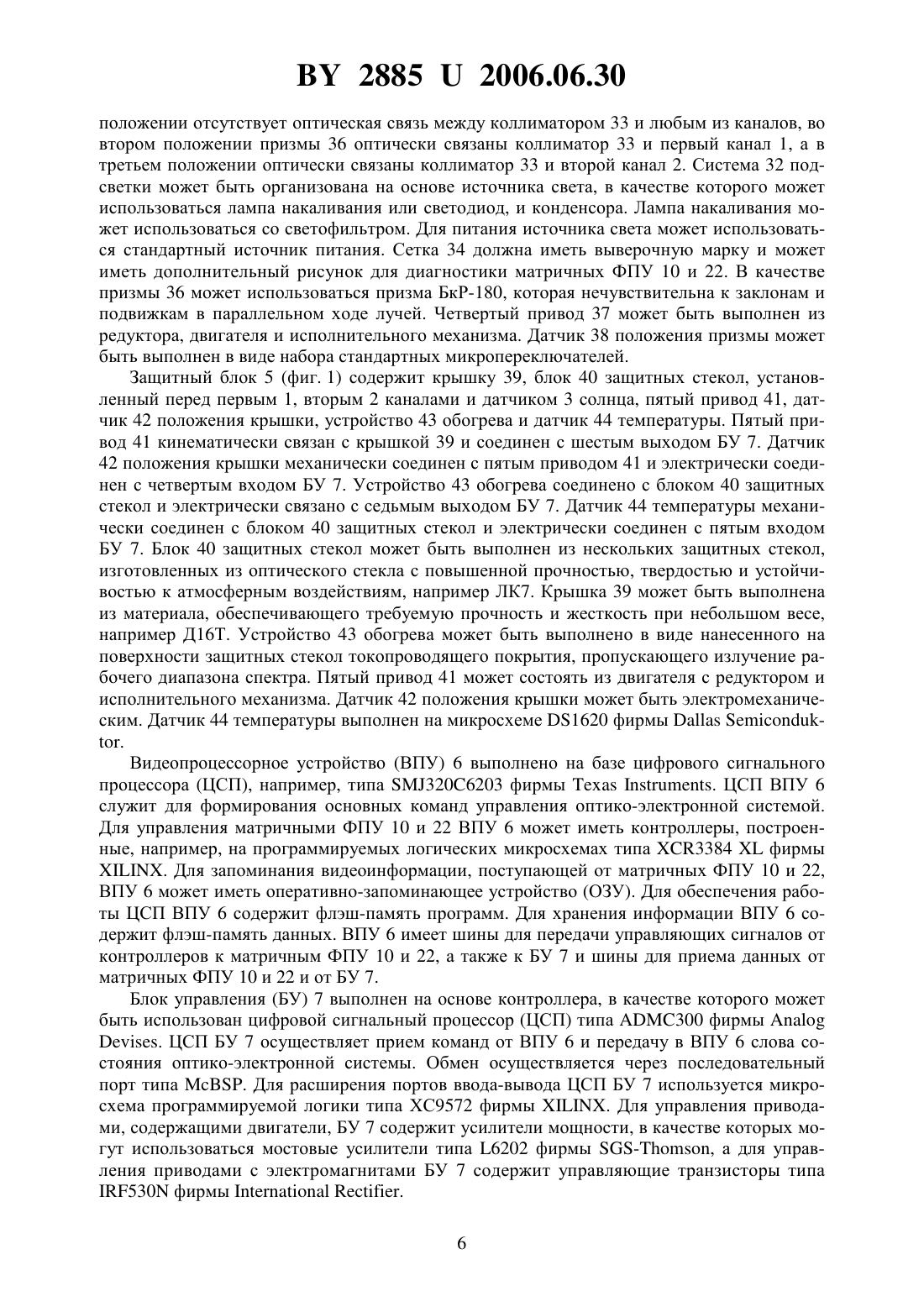
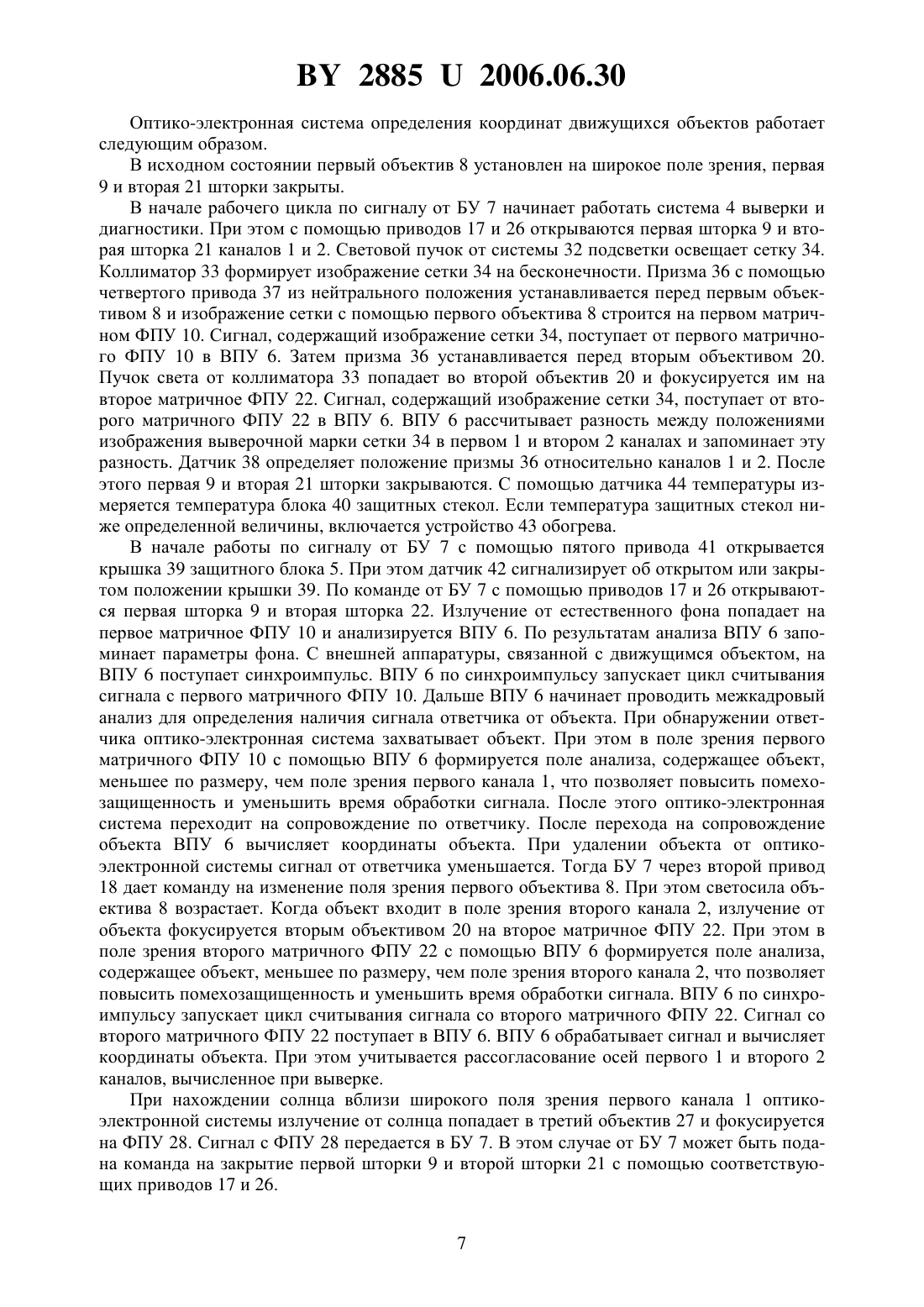
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ(71) Заявитель Открытое акционерное общество Пеленг(72) Авторы Корнейчик Василий Леонидович Кудряшов Александр Алексеевич Красовская Марина Григорьевна Новиченков Владимир Юрьевич Пуляев Евгений Михайлович(73) Патентообладатель Открытое акционерное общество Пеленг(57) Оптико-электронная система определения координат движущихся объектов, содержащая первый канал, включающий первый объектив, оптически связанный с первым матричным фотоприемным устройством, вход и выход которого соединены соответственно с первым выходом и с первым входом видеопроцессорного устройства, отличающаяся тем, что она дополнительно снабжена вторым каналом, датчиком солнца, системой выверки и диагностики, расположенными параллельно первому каналу, защитным блоком и блоком управления, первый канал дополнительно содержит первую шторку, расположенную на оптической оси между первым объективом и первым матричным фотоприемным 28852006.06.30 устройством и кинематически связанную с первым приводом, вход которого соединен с первым выходом блока управления, датчик фокусного расстояния, кинематически связанный со вторым приводом и соединенный с первым входом блока управления, при этом первый объектив выполнен с переменным фокусным расстоянием и кинематически связан со вторым приводом, вход которого соединен со вторым выходом блока управления, второй канал содержит последовательно расположенные на оптической оси второй объектив,вторую шторку и второе матричное фотоприемное устройство, вход и выход которого соединены соответственно со вторым выходом и со вторым входом видеопроцессорного устройства, и третий привод, кинематически связанный со второй шторкой и соединенный с третьим выходом блока управления, датчик солнца содержит последовательно расположенные на оптической оси третий объектив и фотоприемное устройство, выход которого соединен со вторым входом блока управления, система выверки и диагностики содержит оптически связанные систему подсветки, коллиматор и призму, четвертый привод и датчик положения призмы, кинематически связанные с призмой, при этом призма установлена с возможностью обеспечения оптической связи с первым или вторым каналами, датчик положения призмы соединен с третьим входом блока управления, четвертый и пятый выходы которого соединены соответственно с четвертым приводом и с системой подсветки, защитный блок установлен перед первым, вторым каналами и датчиком солнца и содержит блок защитных стекол с крышкой, пятый привод, кинематически связанный с крышкой и соединенный с шестым выходом блока управления, датчик положения крышки, кинематически связанный с пятым приводом и соединенный с четвертым входом блока управления, седьмой выход и пятый вход которого соединены соответственно с устройством обогрева и датчиком температуры, которые соединены с блоком защитных стекол, а восьмой выход блока управления соединен с третьим входом видеопроцессорного устройства, третий выход которого соединен с шестым входом блока управления... . 20, 1981. - Р. 135-142 (прототип). Полезная модель относится к оптическому приборостроению, в частности к оптическим системам слежения и определения координат движущихся объектов, и может быть использована в оптических приборах для слежения и расчета координат ракеты. В полезной модели используется принцип построения изображения удаленного объекта через объектив на матричное фотоприемное устройство (матричное ФПУ) с расчетом координат объекта путем определения положения изображения объекта на матрице. Наиболее близкой по технической сущности является оптико-электронная система слежения, содержащая объектив, матричное ФПУ, блок считывания сигнала и цифровой процессор 1. Недостатком этой оптико-электронной системы слежения является недостаточная точность определения координат и недостаточная помехозащищенность. Задачей полезной модели является повышение точности и помехозащищенности, а также надежности оптико-электронной системы. Поставленная цель достигается тем, что оптико-электронная система определения координат движущихся объектов, содержащая первый канал, включающий первый объектив, оптически связанный с первым матричным ФПУ, вход и выход которого соединены соответственно с первым выходом и с первым входом видеопроцессорного устройства(ВПУ), в отличие от прототипа, дополнительно снабжена вторым каналом, датчиком солнца, системой выверки и диагностики, расположенными параллельно первому каналу,защитным блоком и блоком управления (БУ), первый канал дополнительно содержит первую шторку, расположенную на оптической оси между первым объективом и первым 2 28852006.06.30 матричным ФПУ и кинематически связанную с первым приводом, вход которого соединен с первым выходом БУ, датчик фокусного расстояния, кинематически связанный со вторым приводом и соединенный с первым входом БУ, при этом первый объектив выполнен с переменным фокусным расстоянием и кинематически связан со вторым приводом,вход которого соединен со вторым выходом БУ, второй канал содержит последовательно расположенные на оптической оси второй объектив, вторую шторку и второе матричное ФПУ, вход и выход которого соединены соответственно со вторым выходом и со вторым входом ВПУ, и третий привод, кинематически связанный со второй шторкой и соединенный с третьим выходом БУ, датчик солнца содержит последовательно расположенные на оптической оси третий объектив и фотоприемное устройство (ФПУ), выход которого соединен со вторым входом БУ, система выверки и диагностики содержит оптически связанные систему подсветки, коллиматор и призму, четвертый привод и датчик положения призмы, кинематически связанные с призмой, при этом призма установлена с возможностью обеспечения оптической связи с первым или вторым каналами, датчик положения призмы соединен с третьим входом БУ, четвертый и пятый выходы которого соединены соответственно с четвертым приводом и с системой подсветки, защитный блок установлен перед первым, вторым каналами и датчиком солнца и содержит блок защитных стекол с крышкой, пятый привод, кинематически связанный с крышкой и соединенный с шестым выходом БУ, датчик положения крышки, кинематически связанный с пятым приводом и соединенный с четвертым входом БУ, седьмой выход и пятый вход которого соединены соответственно с устройством обогрева и датчиком температуры, которые соединены с блоком защитных стекол, а восьмой выход БУ соединен с третьим входом ВПУ, третий выход которого соединен с шестым входом БУ. Выполнение первого объектива с переменным фокусным расстоянием позволяет точнее следить за удаляющимся объектом. При захвате объекта требуется широкое поле зрения, которое реализуется при малом фокусном расстоянии первого объектива. При сопровождении объекта необходимо повышать точность определения координат, а также чувствительность оптико-электронной системы путем увеличения диаметра входного зрачка и снижения оптических помех за счет уменьшения поля зрения. Для этого требуется увеличить фокусное расстояние. Первый объектив для изменения фокусного расстояния имеет подвижные компоненты, перемещаемые с помощью привода изменения фокусного расстояния по программе от БУ. Датчик фокусного расстояния передает в БУ текущее значение фокусного расстояния. БУ передает значение фокусного расстояния в ВПУ для расчета координат. Первая защитная шторка с первым приводом обеспечивает защиту первого матричного ФПУ от сильной засветки. Введение второго канала позволяет настроить оптико-электронную систему таким образом, чтобы обеспечить устойчивое непрерывное слежение за объектом на больших дистанциях. При этом первый канал следит за объектом на начальном участке траектории, а второй канал следит за объектом на конечном участке траектории. С увеличением расстояния излучение от объекта ослабевает в квадратичной зависимости от расстояния, а также за счет поглощения излучения атмосферой. На дальних дистанциях до объекта для его устойчивого сопровождения необходим объектив с большой светосилой и большим фокусным расстоянием. Это возможно при увеличении размера входного зрачка объектива и повышении его светопропускания. Для слежения за объектом на конечном участке траектории второй канал имеет значительно больший диаметр зрачка и большее фокусное расстояние. Вторая защитная шторка с третьим приводом обеспечивает защиту второго матричного ФПУ от сильной засветки. Датчик солнца позволяет определять нахождение Солнца вблизи полей зрения каналов. Это позволяет заблаговременно принять решение о защите каналов от воздействия прямого солнечного излучения. Система выверки и диагностики позволяет производить проверку работоспособности оптико-электронной системы перед каждым рабочим циклом. При изменении температу 3 28852006.06.30 ры или других внешних воздействующих факторов может произойти рассогласование оптических осей каналов или изменение параметров матричных ФПУ. Система выверки и диагностики путем последовательной засветки каналов от коллиматора с сеткой через подвижную призму позволяет определить величину рассогласования осей каналов и учесть это рассогласование при расчете координат, а также выполнить диагностику матричных ФПУ и проверить другие параметры каналов. Датчик положения призмы служит для определения положения призмы относительно каналов. Защитный блок защищает оптико-электронную систему от внешних воздействий и неблагоприятных воздействий температуры, влажности и т.п. Крышка имеет привод и открывается только на время работы оптико-электронной системы. Датчик положения крышки сигнализирует об ее открытом или закрытом положении. При колебаниях внешней температуры на внутренних поверхностях оптики может появляться влага, в результате чего резко ухудшается качество оптического изображения за счет рассеянного света. Для исключения запотевания защитных стекол при изменениях температуры служит устройство обогрева защитных стекол и датчик температуры. Полезная модель поясняется следующими чертежами На фиг. 1 представлена общая структурная схема оптико-электронной системы. На фиг. 2 представлена схема первого объектива. На фиг. 3 представлена схема второго объектива. На фиг. 4 представлена схема третьего объектива. На фиг. 5 представлена схема расположения призмы относительно первого и второго каналов. Оптико-электронная система определения координат движущихся объектов (фиг. 1) содержит расположенные параллельно первый канал 1, второй канал 2, датчик 3 солнца и систему 4 выверки и диагностики, а также защитный блок 5, видеопроцессорное устройство (ВПУ) 6 и блок управления (БУ) 7, электрически связанные друг с другом. Первый канал 1 (фиг. 1, 2) содержит последовательно расположенные и оптически связанные первый объектив 8, первую шторку 9 и первое матричное ФПУ 10, электрически связанное с ВПУ 6. Первый объектив 8 может быть выполнен в виде ряда оптически связанных элементов, обеспечивающих требуемую фокусировку излучения объекта на фоточувствительной площадке первого матричного ФПУ 10 и требуемое поле зрения. При этом для изменения поля зрения в первом объективе 8 могут использоваться подвижные оптические компоненты, перемещаемые вдоль оптической оси объектива, либо вводимые в ход лучей объектива. Первый объектив 8 включает бленду 11, два неподвижных компонента 12 и 13,светофильтр 14 и два подвижных компонента 15 и 16. Светофильтр 14 может быть закреплен на подвижном компоненте 16. Первая шторка 9, расположенная на оптической оси между первым объективом 8 и первым матричным ФПУ 10, кинематически связана с первым приводом 17, вход которого соединен с первым выходом БУ 7. Первый объектив 8 кинематически связан со вторым приводом 18, вход которого соединен со вторым выходом БУ 7. Датчик 19 фокусного расстояния кинематически связан со вторым приводом 18 и соединен с первым входом БУ 7. Второй привод 18 может быть выполнен в виде исполнительного механизма с двигателем и редуктором. При выполнении первого объектива 8 панкратическим он должен иметь подвижные оптические компоненты, перемещаемые вдоль оптической оси по определенному закону. При этом привод 18 может быть выполнен с использованием двигателя с редуктором и кулачков, обеспечивающих заданный закон движения подвижных линзовых компонентов 15 и 16 объектива. Датчик 19 фокусного расстояния может быть электромеханическим, например, в виде переменного резистора. Бленда 11 введена с целью уменьшения паразитной засветки. При большой яркости фона или нахождении Солнца вблизи поля зрения канала возникает паразитная засветка, которая может привести к по 4 28852006.06.30 явлению бликов и потере объекта слежения. Возникающий при этом рассеянный свет уменьшает соотношение сигнал/шум. Светофильтр 14 должен иметь спектральное пропускание, которое оптимизирует соотношение сигнал/шум в рабочем спектральном диапазоне и защищает от помех. Светофильтр 14 может быть выполнен в виде пластины из материала, пропускающего рабочую область спектра и поглощающего в остальных областях. Светофильтр 14 может быть выполнен на основе отрезающих интерференционных покрытий или узкополосного покрытия, или на основе сочетания пластины из селективно пропускающего материала и одного или нескольких интерференционных покрытий. Шторка 9 обеспечивает защиту первого матричного ФПУ 10 и может быть выполнена в виде пластинки из непрозрачного материала. Первый привод 17 может состоять из редуктора, двигателя и исполнительного механизма. Матричное ФПУ 10 может быть выполнено на основе матричного фотоприемника, например ПЗС или КМОП матрицы. Конструктивно матричное ФПУ 10 может быть выполнено в виде платы, на которой располагаются,кроме матричного ФПУ, электронные компоненты для управления матричным ФПУ, считывания сигнала и аналого-цифровой преобразователь (АЦП) для преобразования сигнала в цифровой код. Второй канал 2 (фиг. 1, 3) содержит последовательно расположенные на одной оптической оси второй объектив 20, вторую шторку 21 и второе матричное ФПУ 22, электрически связанное с ВПУ 6. Второй объектив 20, включающий бленду 23, фокусирующий компонент 24 и светофильтр 25, обеспечивает требуемую фокусировку излучения объекта на фоточувствительную площадку второго матричного ФПУ 22 и требуемое поле зрения. Вторая шторка 21 кинематически связана с третьим приводом 26, электрически связанным с третьим выходом БУ 7. Бленда 23 введена с целью уменьшения паразитной засветки. При большой яркости фона или нахождении Солнца вблизи поля зрения канала возникает паразитная засветка, которая может привести к появлению бликов и потере объекта слежения. Возникающий при этом рассеянный свет уменьшает соотношение сигнал/шум. Светофильтр 25 используется для оптимизации соотношения сигнал/шум в рабочем спектральном диапазоне и защиты от помех и может быть выполнен аналогично светофильтру 14. Вторая шторка 21 и третий привод 26 обеспечивают защиту матричного ФПУ 22 и могут быть выполнены аналогично первой шторке 9 и первому приводу 17. Матричное ФПУ 22 может быть выполнено аналогично матричному ФПУ 10. Датчик 3 солнца (фиг. 1, 4) включает последовательно расположенные и оптически связанные третий объектив 27 и фотоприемное устройство (ФПУ) 28, электрически связанное со вторым входом БУ 7. Третий объектив 27, содержащий бленду 29, фокусирующий компонент 30 и светофильтр 31, обеспечивает требуемую фокусировку излучения объекта на фоточувствительной площадке ФПУ 28 и требуемое поле зрения. Бленда 29 введена с целью уменьшения паразитной засветки. ФПУ 28 может быть выполнено на основе одноплощадочного или многоплощадочного фотоприемника. ФПУ 28 может быть выполнено в виде платы, содержащей фотоприемник и электронные компоненты для считывания и преобразования сигнала. При этом плата может содержать пороговое устройство, устанавливающее порог срабатывания датчика 3 солнца. Светофильтр 31 служит для выставки чувствительности датчика 3 солнца и может быть выполнен таким образом, чтобы обеспечивать спектральный диапазон, аналогичный спектральному диапазону работы 1 и 2 каналов, а также может обеспечивать ослабление входящего светового потока, чтобы избежать повреждения чувствительной площадки от прямого солнечного излучения. Система 4 выверки и диагностики (фиг. 1, 5) включает оптически связанные систему 32 подсветки, коллиматор 33, содержащий сетку 34 и объектив 35, и подвижную призму 36, которая может устанавливаться своей выходной гранью перед первым 1 и вторым 2 каналами. Система 32 подсветки соединена с пятым выходом БУ 7. Призма 36 кинематически связана с четвертым приводом 37, соединенным с четвертым выходом БУ 7. Датчик 38 положения призмы кинематически связан с призмой 36 и соединен с третьим входом БУ 7. Призма 36 имеет три фиксированных положения, при этом в первом нейтральном 5 28852006.06.30 положении отсутствует оптическая связь между коллиматором 33 и любым из каналов, во втором положении призмы 36 оптически связаны коллиматор 33 и первый канал 1, а в третьем положении оптически связаны коллиматор 33 и второй канал 2. Система 32 подсветки может быть организована на основе источника света, в качестве которого может использоваться лампа накаливания или светодиод, и конденсора. Лампа накаливания может использоваться со светофильтром. Для питания источника света может использоваться стандартный источник питания. Сетка 34 должна иметь выверочную марку и может иметь дополнительный рисунок для диагностики матричных ФПУ 10 и 22. В качестве призмы 36 может использоваться призма БкР-180, которая нечувствительна к заклонам и подвижкам в параллельном ходе лучей. Четвертый привод 37 может быть выполнен из редуктора, двигателя и исполнительного механизма. Датчик 38 положения призмы может быть выполнен в виде набора стандартных микропереключателей. Защитный блок 5 (фиг. 1) содержит крышку 39, блок 40 защитных стекол, установленный перед первым 1, вторым 2 каналами и датчиком 3 солнца, пятый привод 41, датчик 42 положения крышки, устройство 43 обогрева и датчик 44 температуры. Пятый привод 41 кинематически связан с крышкой 39 и соединен с шестым выходом БУ 7. Датчик 42 положения крышки механически соединен с пятым приводом 41 и электрически соединен с четвертым входом БУ 7. Устройство 43 обогрева соединено с блоком 40 защитных стекол и электрически связано с седьмым выходом БУ 7. Датчик 44 температуры механически соединен с блоком 40 защитных стекол и электрически соединен с пятым входом БУ 7. Блок 40 защитных стекол может быть выполнен из нескольких защитных стекол,изготовленных из оптического стекла с повышенной прочностью, твердостью и устойчивостью к атмосферным воздействиям, например ЛК 7. Крышка 39 может быть выполнена из материала, обеспечивающего требуемую прочность и жесткость при небольшом весе,например Д 16 Т. Устройство 43 обогрева может быть выполнено в виде нанесенного на поверхности защитных стекол токопроводящего покрытия, пропускающего излучение рабочего диапазона спектра. Пятый привод 41 может состоять из двигателя с редуктором и исполнительного механизма. Датчик 42 положения крышки может быть электромеханическим. Датчик 44 температуры выполнен на микросхеме 1620 фирмы. Видеопроцессорное устройство (ВПУ) 6 выполнено на базе цифрового сигнального процессора (ЦСП), например, типа 3206203 фирмы. ЦСП ВПУ 6 служит для формирования основных команд управления оптико-электронной системой. Для управления матричными ФПУ 10 и 22 ВПУ 6 может иметь контроллеры, построенные, например, на программируемых логических микросхемах типа 3384 фирмы. Для запоминания видеоинформации, поступающей от матричных ФПУ 10 и 22,ВПУ 6 может иметь оперативно-запоминающее устройство (ОЗУ). Для обеспечения работы ЦСП ВПУ 6 содержит флэш-память программ. Для хранения информации ВПУ 6 содержит флэш-память данных. ВПУ 6 имеет шины для передачи управляющих сигналов от контроллеров к матричным ФПУ 10 и 22, а также к БУ 7 и шины для приема данных от матричных ФПУ 10 и 22 и от БУ 7. Блок управления (БУ) 7 выполнен на основе контроллера, в качестве которого может быть использован цифровой сигнальный процессор (ЦСП) типа 300 фирмы. ЦСП БУ 7 осуществляет прием команд от ВПУ 6 и передачу в ВПУ 6 слова состояния оптико-электронной системы. Обмен осуществляется через последовательный порт типа . Для расширения портов ввода-вывода ЦСП БУ 7 используется микросхема программируемой логики типа ХС 9572 фирмы . Для управления приводами, содержащими двигатели, БУ 7 содержит усилители мощности, в качестве которых могут использоваться мостовые усилители типа 6202 фирмы -, а для управления приводами с электромагнитами БУ 7 содержит управляющие транзисторы типа 530 фирмы. 6 28852006.06.30 Оптико-электронная система определения координат движущихся объектов работает следующим образом. В исходном состоянии первый объектив 8 установлен на широкое поле зрения, первая 9 и вторая 21 шторки закрыты. В начале рабочего цикла по сигналу от БУ 7 начинает работать система 4 выверки и диагностики. При этом с помощью приводов 17 и 26 открываются первая шторка 9 и вторая шторка 21 каналов 1 и 2. Световой пучок от системы 32 подсветки освещает сетку 34. Коллиматор 33 формирует изображение сетки 34 на бесконечности. Призма 36 с помощью четвертого привода 37 из нейтрального положения устанавливается перед первым объективом 8 и изображение сетки с помощью первого объектива 8 строится на первом матричном ФПУ 10. Сигнал, содержащий изображение сетки 34, поступает от первого матричного ФПУ 10 в ВПУ 6. Затем призма 36 устанавливается перед вторым объективом 20. Пучок света от коллиматора 33 попадает во второй объектив 20 и фокусируется им на второе матричное ФПУ 22. Сигнал, содержащий изображение сетки 34, поступает от второго матричного ФПУ 22 в ВПУ 6. ВПУ 6 рассчитывает разность между положениями изображения выверочной марки сетки 34 в первом 1 и втором 2 каналах и запоминает эту разность. Датчик 38 определяет положение призмы 36 относительно каналов 1 и 2. После этого первая 9 и вторая 21 шторки закрываются. С помощью датчика 44 температуры измеряется температура блока 40 защитных стекол. Если температура защитных стекол ниже определенной величины, включается устройство 43 обогрева. В начале работы по сигналу от БУ 7 с помощью пятого привода 41 открывается крышка 39 защитного блока 5. При этом датчик 42 сигнализирует об открытом или закрытом положении крышки 39. По команде от БУ 7 с помощью приводов 17 и 26 открываются первая шторка 9 и вторая шторка 22. Излучение от естественного фона попадает на первое матричное ФПУ 10 и анализируется ВПУ 6. По результатам анализа ВПУ 6 запоминает параметры фона. С внешней аппаратуры, связанной с движущимся объектом, на ВПУ 6 поступает синхроимпульс. ВПУ 6 по синхроимпульсу запускает цикл считывания сигнала с первого матричного ФПУ 10. Дальше ВПУ 6 начинает проводить межкадровый анализ для определения наличия сигнала ответчика от объекта. При обнаружении ответчика оптико-электронная система захватывает объект. При этом в поле зрения первого матричного ФПУ 10 с помощью ВПУ 6 формируется поле анализа, содержащее объект,меньшее по размеру, чем поле зрения первого канала 1, что позволяет повысить помехозащищенность и уменьшить время обработки сигнала. После этого оптико-электронная система переходит на сопровождение по ответчику. После перехода на сопровождение объекта ВПУ 6 вычисляет координаты объекта. При удалении объекта от оптикоэлектронной системы сигнал от ответчика уменьшается. Тогда БУ 7 через второй привод 18 дает команду на изменение поля зрения первого объектива 8. При этом светосила объектива 8 возрастает. Когда объект входит в поле зрения второго канала 2, излучение от объекта фокусируется вторым объективом 20 на второе матричное ФПУ 22. При этом в поле зрения второго матричного ФПУ 22 с помощью ВПУ 6 формируется поле анализа,содержащее объект, меньшее по размеру, чем поле зрения второго канала 2, что позволяет повысить помехозащищенность и уменьшить время обработки сигнала. ВПУ 6 по синхроимпульсу запускает цикл считывания сигнала со второго матричного ФПУ 22. Сигнал со второго матричного ФПУ 22 поступает в ВПУ 6. ВПУ 6 обрабатывает сигнал и вычисляет координаты объекта. При этом учитывается рассогласование осей первого 1 и второго 2 каналов, вычисленное при выверке. При нахождении солнца вблизи широкого поля зрения первого канала 1 оптикоэлектронной системы излучение от солнца попадает в третий объектив 27 и фокусируется на ФПУ 28. Сигнал с ФПУ 28 передается в БУ 7. В этом случае от БУ 7 может быть подана команда на закрытие первой шторки 9 и второй шторки 21 с помощью соответствующих приводов 17 и 26. 7 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: G02B 27/00, G01B 11/00
Метки: система, оптико-электронная, определения, объектов, движущихся, координат
Код ссылки
<a href="https://by.patents.su/8-u2885-optiko-elektronnaya-sistema-opredeleniya-koordinat-dvizhushhihsya-obektov.html" rel="bookmark" title="База патентов Беларуси">Оптико-электронная система определения координат движущихся объектов</a>
Оптико-электронная система для учета движущихся на конвейере предметов

Номер патента: 5585
Опубликовано: 30.12.2003
Авторы: Шевченко Александр Анатольевич, Житников Валерий Васильевич, Даненков Александр Михайлович
МПК: G06M 7/04
Метки: учета, предметов, система, конвейере, оптико-электронная, движущихся
Текст:
...фотоприемниками, при этом одна линейка расположена вертикально, а две другие расположены параллельно направлению движения предметов,расположены на разных уровнях и смещены друг относительно друга. На фиг. 1 представлена структурная схема оптико-электронной системы для учета движущихся на конвейере предметов. На фиг. 2-4 изображены примеры установки базового комплекта линеек излучателей и фотоприемников оптико-электронного датчика...
Акустико-эмиссионная система для диагностики промышленных объектов (варианты)
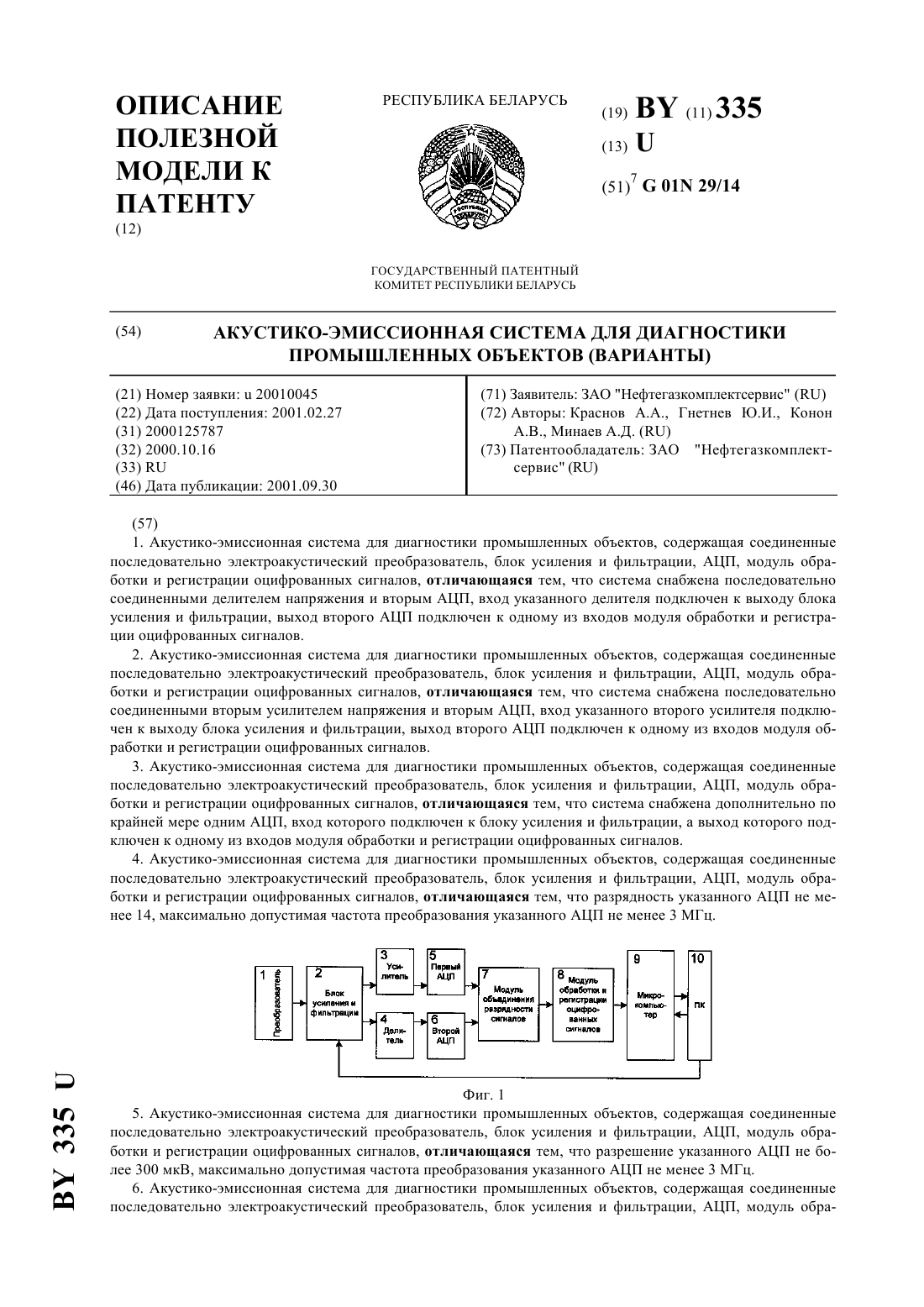
Номер патента: U 335
Опубликовано: 30.09.2001
Авторы: Краснов Александр Александрович, Конон Альберт Викторович, Гнетнев Юрий Иванович, Минаев Алексей Дмитриевич
МПК: G01N 29/14
Метки: система, объектов, диагностики, акустико-эмиссионная, варианты, промышленных
Текст:
...система для диагностики промышленных объектов, содержащая управляющий компьютер, несколько подключенных к управляющему компьютеру модулей сбора данных акустической эмиссии, каждый из которых содержит разъем сопряжения с управляющим компьютером и несколько подключенных к указанному разъему каналов регистрации, каждый из которых содержит 6 335 последовательно соединенные электроакустический преобразователь, блок усиления и...
Устройство измерения трехмерных объектов
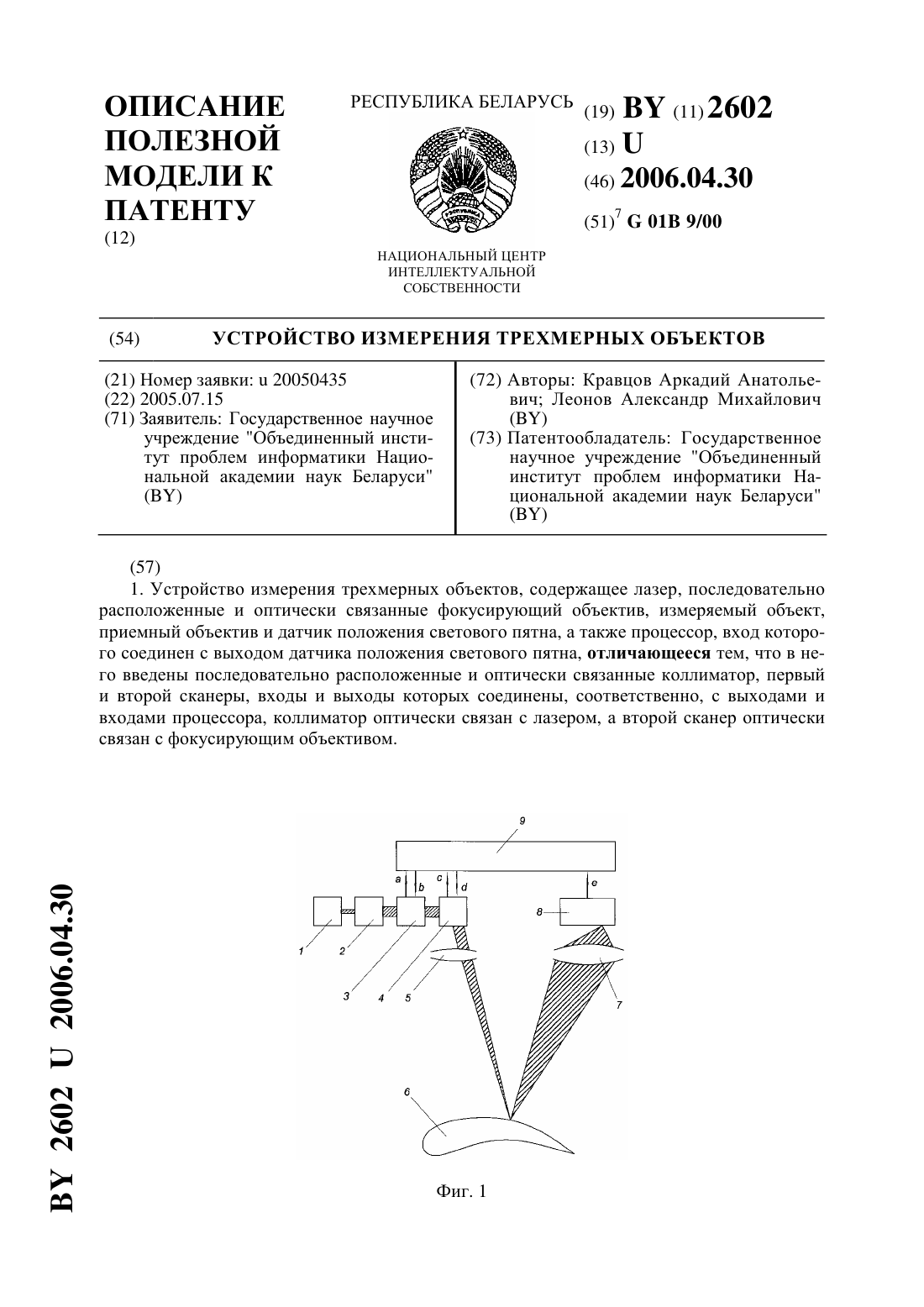
Номер патента: U 2602
Опубликовано: 30.04.2006
Авторы: Леонов Александр Михайлович, Кравцов Аркадий Анатольевич
МПК: G01B 9/00
Метки: объектов, трехмерных, измерения, устройство
Текст:
...датчика, микрообъектив,объектив и датчик положения светового пятна. Схема предлагаемого устройства изображена на фиг. 1. Схема датчика положения светового пятна изображена на фиг. 2. Схема сканера изображена на фиг. 3. Схема датчика положения зеркала изображена на фиг. 4. Устройство состоит из последовательно установленных и оптически связанных лазера 1, коллиматора 2, первого и второго сканеров 3 и 4, ориентированных перпендикулярно друг...
Акустико-эмиссионная система для диагностики промышленных объектов
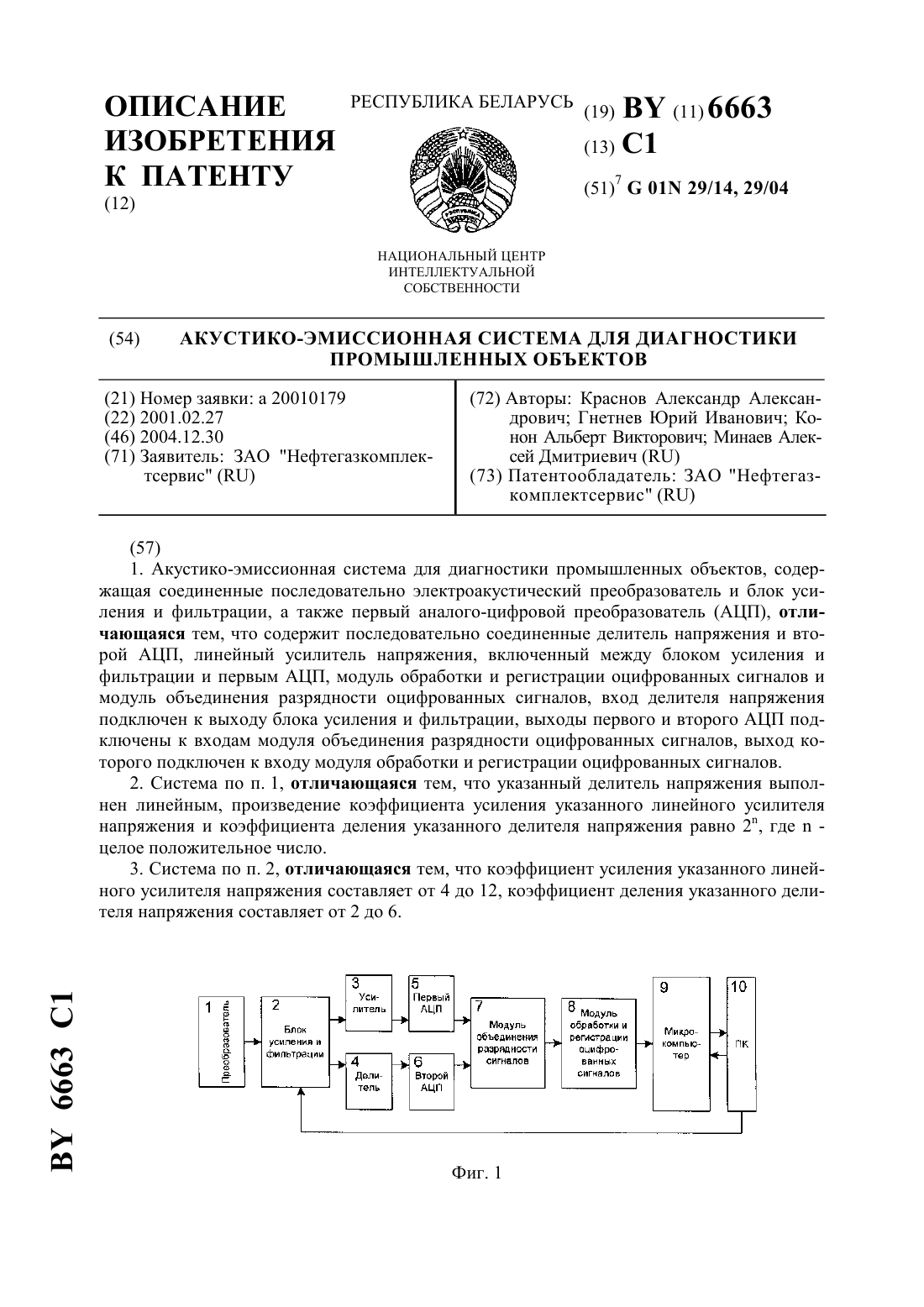
Номер патента: 6663
Опубликовано: 30.12.2004
Авторы: Минаев Алексей Дмитриевич, Краснов Александр Александрович, Конон Альберт Викторович, Гнетнев Юрий Иванович
МПК: G01N 29/14, G01N 29/04
Метки: система, объектов, диагностики, акустико-эмиссионная, промышленных
Текст:
...деления указанного делителя напряжения составляет от 2 до 6. Разрешающая способность указанных АЦП составляет не более 300 мкВ, разрядность указанных АЦП не менее 14, максимально допустимая частота преобразования указанных АЦП не менее 3 МГц, напряжение питания указанного электроакустического преобразователя от 5 до 30 В. Модуль объединения разрядности оцифрованных сигналов и модуль обработки и регистрации оцифрованных сигналов...
Система волоконно-оптической связи
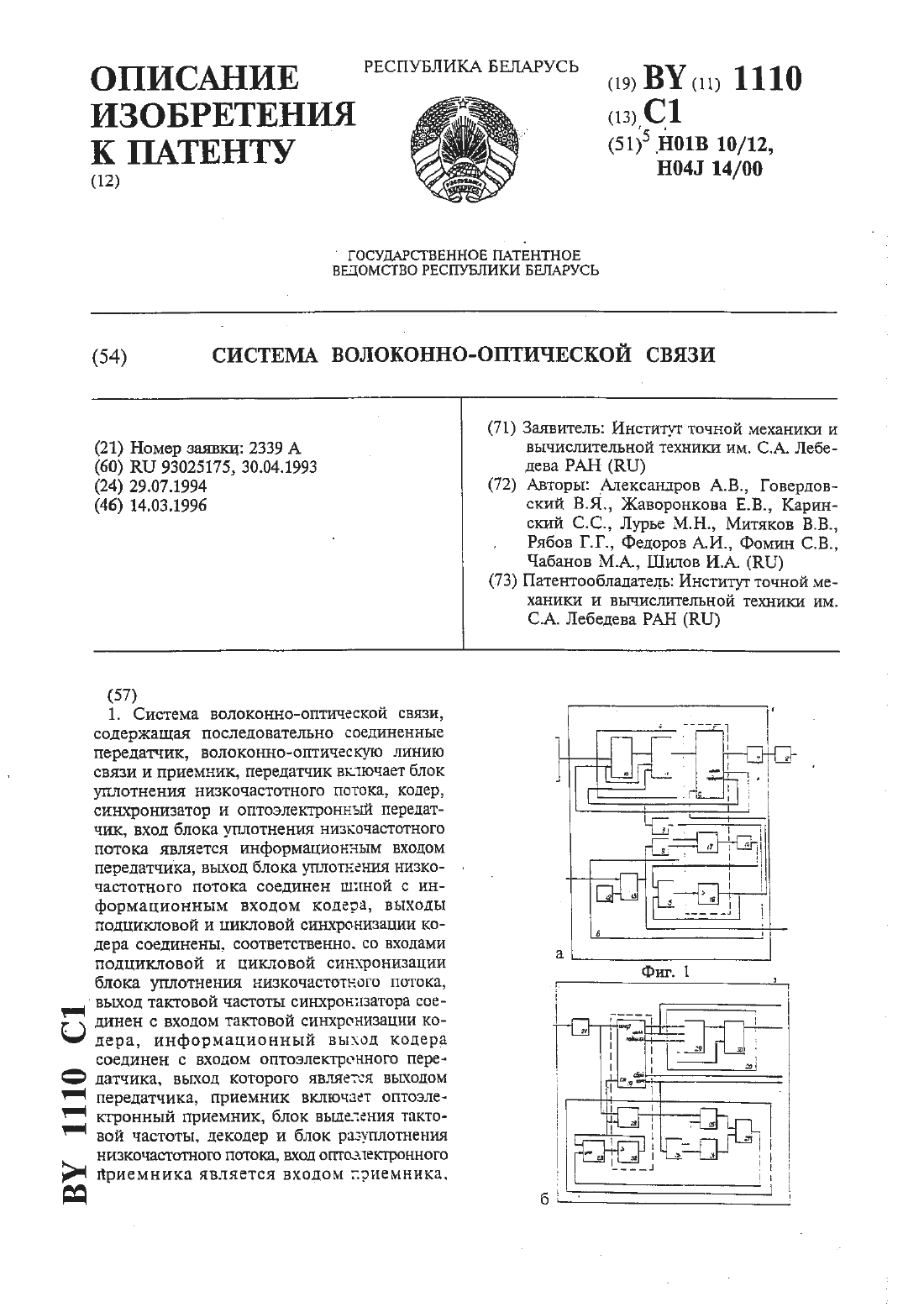
Номер патента: 1110
Опубликовано: 14.03.1996
Авторы: Говердовский Виталий Яковлевич, Фомин Сергей Владимирович, Митяков Владимир Владимирович, Федоров Александр Иванович, Шилов Игорь Анатольевич, Александров Александр Викторович, Рябов Геннадий Георгиевич, Лурье Михаил Натанович, Каринский Сергей Сергеевич, Жаворонкова Елена Васильевна, Чабанов Михаил Анатольевич
МПК: H04J 14/00, H01B 10/12
Метки: волоконно-оптической, система, связи
Текст:
...два, Квходом первого К-З-триггера и входами синхронизации второго и третьего Д-триггеров,выход первого К-Б-триггера соединен с первым входом второго элемента И, выход второго Д-триггера соединен со вторым входом второго элемента И и вторым входом элемента ИЛИ-НЕ, выход которого соединен с К-входом второго К-З-триггера, выход третьего Д-триггера соединен с третьим входом второго элемента И, выход которого соединен с З-входом второго...
Предыдущий патент: Устройство для контроля рассогласования линии визирования прицела и оси орудия объекта
Следующий патент: Газогенератор для твердого топлива
Случайный патент: Бункер зерноуборочного комбайна