Устройство для сбора данных по урожайности для комбайна
Текст
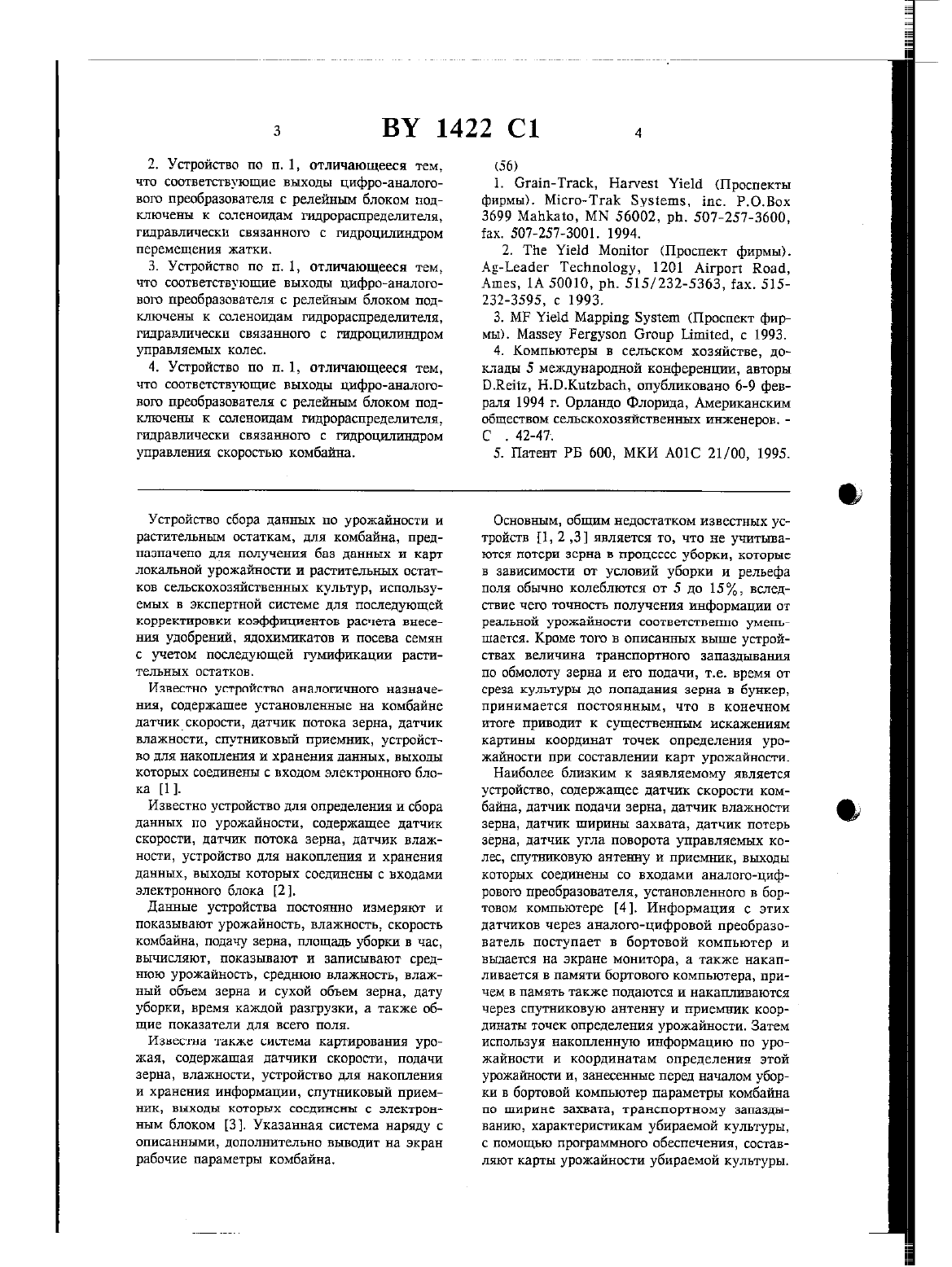
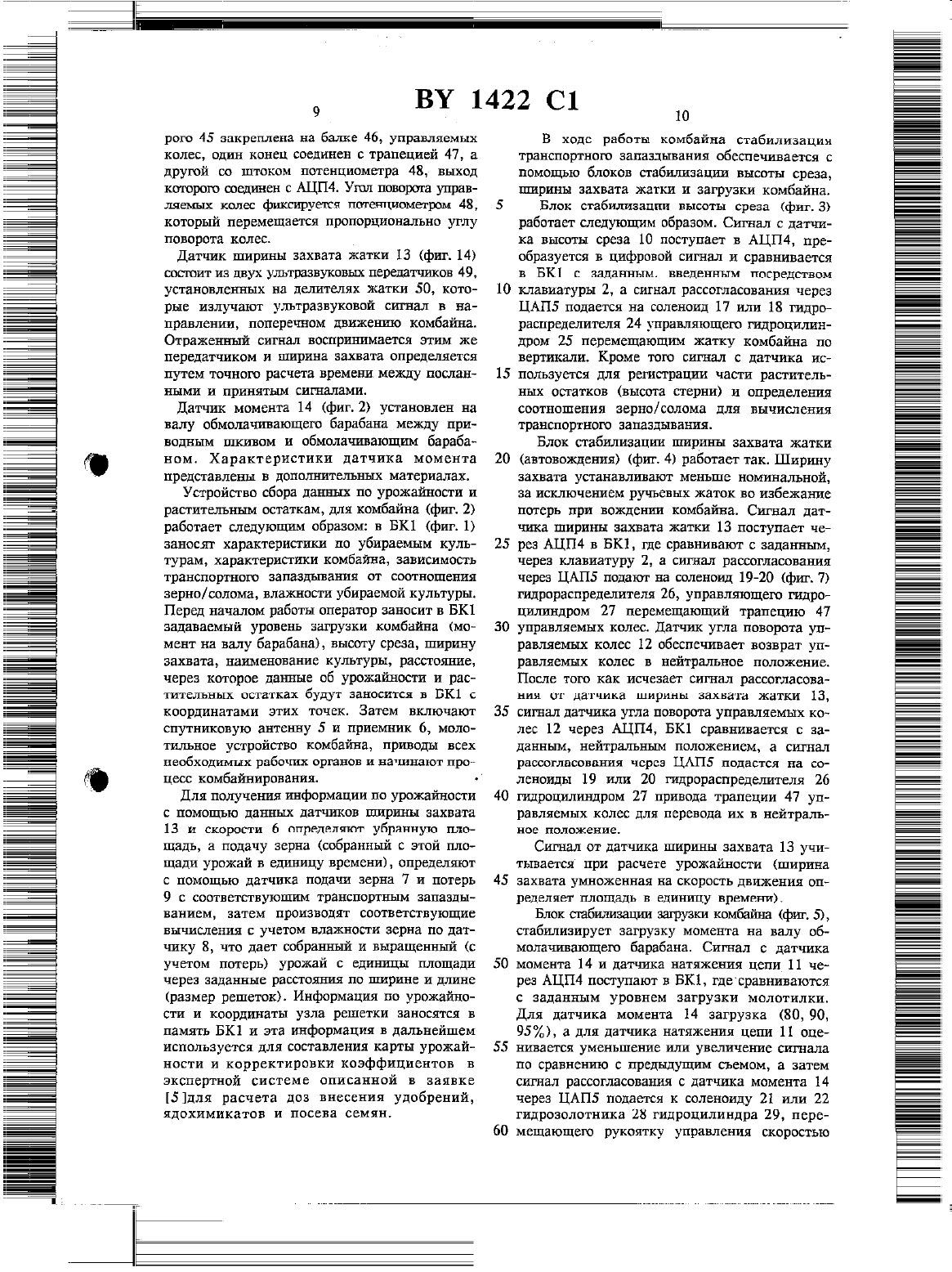
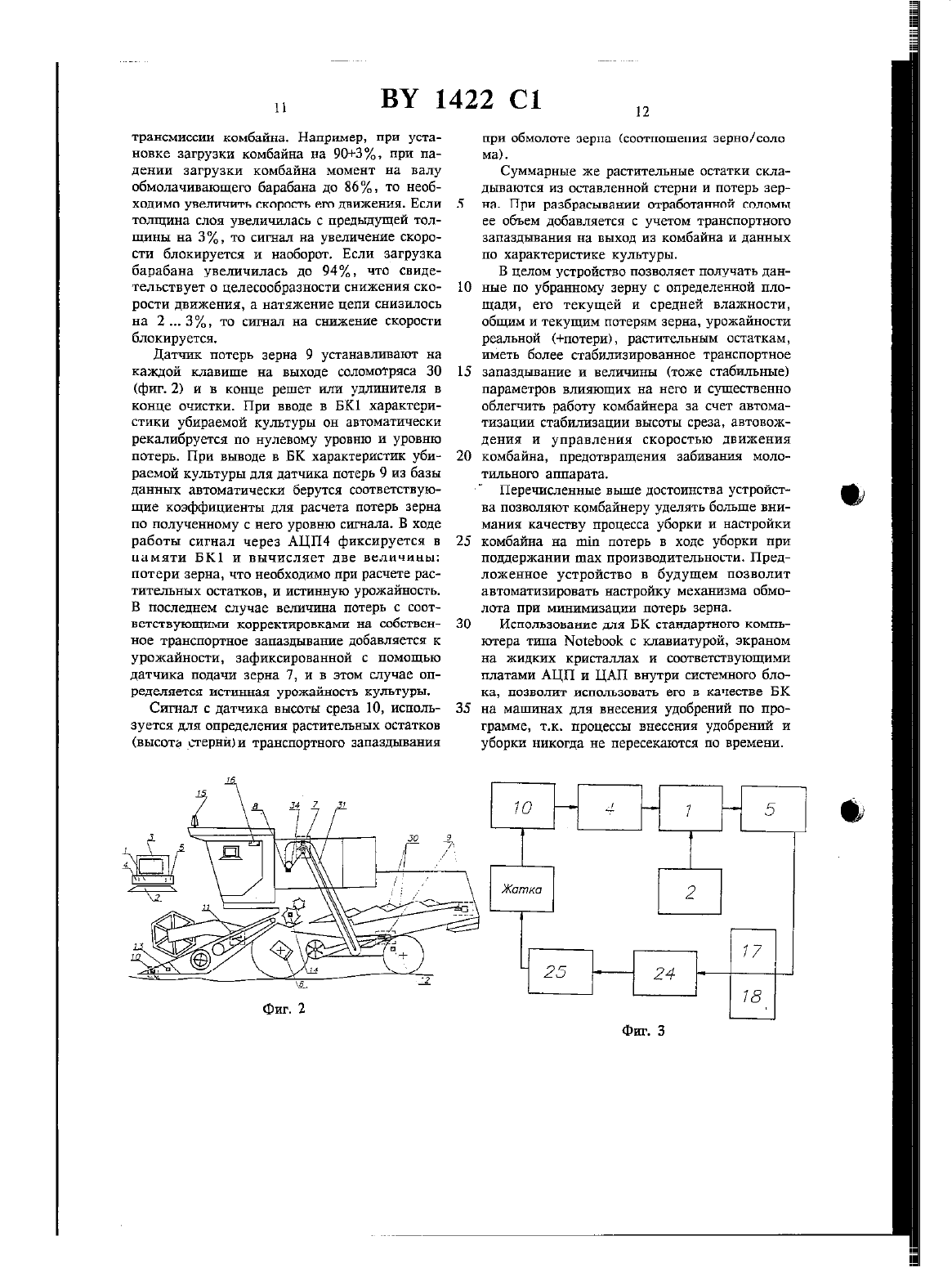
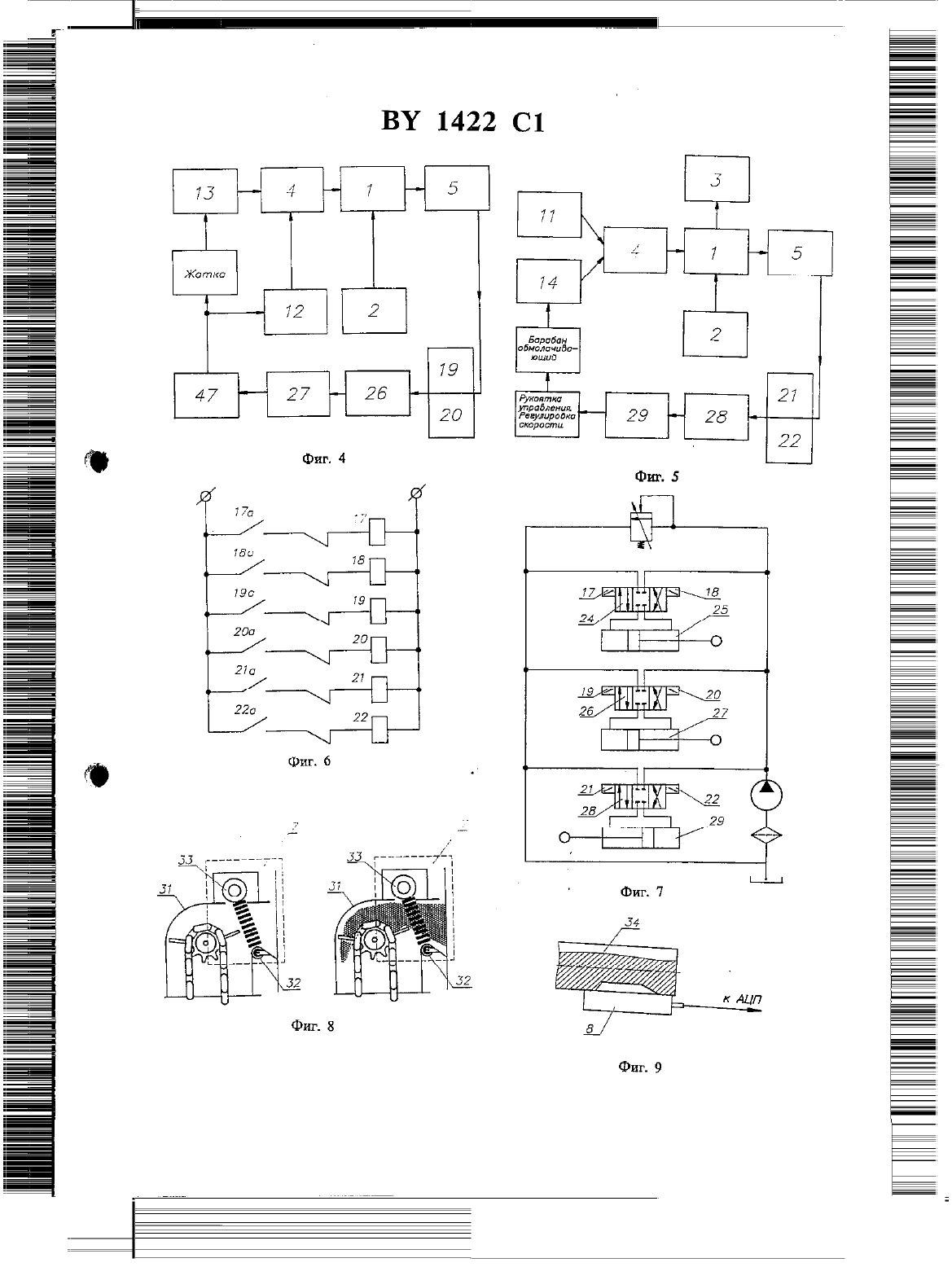
2. Устройство по п. 1, отличающееся тем,что соответствующие выходы цифро-аналоговою преобразователя с релейным блоком подключены к соленоидам гтщрораспредшгителя,гидравлически связанного с гидроцилиндрам ПЕРЕМЕЩЕНИЯ ЖНТКИ.3. Устройство по п. 1, отличающееся тем,что соответствующие выходы цифро-аналогового преобразователя с релейным блоком подключены к соленоидам гидрораспределителя,гидравлическп связанного с гидроцилиндрам управляемых колес.4. Устройство по п. 1, отличающееся тем,что соответствующие выходы цифро-аналогового преобразователя с релейным блоком подключены к соленоидам гидрораспределитедш,гидравлически связанного с гидроцилиндром управления скоростью комбайна.3. МР Леш Марршд Зузтеш (Проспект фирмы), Мазэеу Регдузоп Сггопр Цшйтеа, с 1993.4. Компьютеры в сельском хозяйстве, доклады 5 международной конференции, авторы Цкеш, Н.В.Кпт 2 Ьас 11, опубликовано 6-9 февраля 1994 г. Орландо Флорида, Американским обществом сельскохозяйственных инженеров. С 42-47.Устройство сбора данных по урожайности и растительным остаткам, для комбайна, предназначено для получения баз данных и карт локальной урожайности и растительных остатков сельскохозяйственных культур, используемых в экспертной системе для последующей корректировки коэффициентов расчета внесения удобрений, ядохимикатов и посева семян с учетом последующей гумификации растительных остатков.Известно устройство аналогичного назначения, содержащее установленные на комбайне датчикскоросги, датчик потока зерна, датчик влажности, спутниковый приемник, устройство для накопления и хранения данных, выходы которых соединены с входом электронного блока 1.Известно устройство для определения и сбора данных по урожайности, содержащее датчик скорости, датчик потока зерна, датчик влажности, устройство для накопления и хранения данных, выходы которых соединены с входами электронного блока 2.Данные устройства постоянно измеряют и показывают урожайность, влажность, скорость комбайна, подачу зерна, площадь уборки в час,вычисляют, показывают и записывают среднюю урожайность, среднюю влажность, влажный обгьем зерна и сухой объем зерна, дату уборки, время каждой разгрузки, а также общие показатели для всего поля.Известна также система картирования урожая, содержащая датчики скорости, подачи зерна, влажности, устройство для накопления и хранения информации, спутниковый приемник, выходы которых соединены с электронным блоком З. Указанная система наряду с описанными, дополнительно выводит на экран рабочие параметры комбайна.Основным, общим недостатком известных устройств П, 2 3 является то, что не учитываются нотери зерна в процсссс уборки, которые в зависимости от условий уборки и рельефа поля обычно колеблются от 5 до 15 , вследствие чего точность получения информации от реальной урожайности соответственно уменьшается. Кроме того в описанных выше устройствах величина транспортного запаздывания по обмолоту зерна и его подачи, т.е. время от среза культуры до попадания зерна в бункер,принимается постоянным, что в конечном итоге приводит к существенным искажениям картины координат точек определения урожайности при составлении карт урожайности.Наиболее близким к заявляемому является устройство, содержащее датчик скорости комбайна, датчик подачи зерна, датчик влажности зерна, датчик ширины захвата, датчик потерь зерна, датчик угла поворота управляемых колес, спутниковую антенну и приемник, выходы которых соединены со входами аналоге-цифрового преобразователя, установленного в бортовом компьютере 4. Информация с этих датчиков через аналоге-цифровой преобразователь поступает в бортовой компьютер и выдается на экране монитора, а также накапливается в памяти бортового компьютера, причем в память также подаются и накапливаются через спутниковую антенну и приемник координаты точек определения урожайности. Затем используя накопленную информацию по урожайности и координатам определения этой урожайности и, занесенные перед началом уборки в бортовой компьютер параметры комбайна по ширине захвата, транспортному запаздываншо, характеристикам убираемой культуры,с помощью программного обеспечения, составляют карты урожайности убираемой культуры.Недостатком известного устройства является невозможность учета транспортного запаздывания, которое зависит от соотношения объемных масс соломы и зерна, находящихся в прямой зависимости от высоты среза.Не учитывается также и то, что меняется ширина захвата жатки, поскольку комбайн работает не на полную ширину жатки из-за неточности вождения, что меняет подачу массы в комбайн и соответственно транспортное запаздывание и потери.Кроме того, в прототипе не обеспечивается постоянство транспортного запаздывания изза отсутствия средств стабилизации таких параметрон, как ширина захвата, высота среза,момент на обмолачивающем барабане. Только при знании величины транспортного запаздывания, в зависимости от указанных параметров комбайна и характеристик убираемой культуры и учета потерь зерна, возможно определить действительную карту урожайности. Известное устройство к тому же не позволяет получать информацию о растительных остатках, потерях зерна и оставшейся соломы, для расчета их гумификации, аккумуляции снега и расчета норм посева, доз внесения удобрений и ядохимикатов.Таким образом, задачей предлагаемого устройства является получение более точной картины урожайности и растительных остатков путем учета потерь зерна оставшейся стерни,с соответствующим транспортным запаздыванием и обеспечения его стабилизации.Поставленная задача достигается тем, что в заявляемом устройстве для сбора данных по урожайности для комбайна содержащим датчик пройденного пути и скорости, датчик подачи зерна, датчик влажности зерна, датчик ширины захвата, датчик потерь зерна, датчик угла поворота управляемых колес, спутниковую антенну и приемник, выходы которых соединены с соответствующими входами аналого-цифрового преобразователя, входы коТОРОГО ПОДКЛЮЧЕНЫ КО ВХОДИМ КОМПЬЮТРЗ дополнительно введены датчик высоты среза жатки комбайна, датчик момента на валу молотильного барабана, датчик натяжения цепи подающего транспортера, выходы которых через аналою-цифровой преобразователь связаны с компьютером, а также цифро-аналоговым преобразователем с релейным блоком, входы которою подкшочены к входам компьютера, а выходы к соленоидам гидрораспределителей,сообщенных с гидроцилиндрами соответствующих стабилизирующих систем комбайна и соответствующие выходы цифро-аналогового преобразователя с релейным блоком подключены к соленоидам гидрораспределителя, гидравлически связанного с гидроцнлиндром управления скоростью комбайна.Кроме того, подключение соответствующих Выходов цифро-аналогового преобразователя с релейным блоком к соленоидам гидрораспреДСЛИТЕЛЯ, гидравлически СБЯЗНННОГО С ГИДРОцилиндром перемещения жатки, обеспечивает определение соотношения зерна и соломы для ВЫЧИСЛЕНИЯ ТРННСПОрТНОГО ЗЭПЗЗДЫВЗНИЯ 0 С ионного потока зерна и расчета оставшейся в поле соломы (растительных остатков).Подключение соответствующих выходов цифро-аналогового преобразователя с релейным блоком к соленоидам гидрораспределителя, пщравлически связанного с гидроцилиндром управляемых колес одновременно со стабилизацией ширины захвата жатки обеспечивает более стабильное транспортное запаздывание и автовождение комбайна, что обеспечивает работу комбайнера, позволяет ему следить за процессом обмолота и делать необходимые регулировки по ходу,например изменять частоту вращения вентилятора, менять зазор в жалюзях и т.д.Подключение соответствующих выходов цифро-аналоговото преобразователя с релейным блоком к соленоидам гидрораспределителя,гидравлически связанного с гидроцилиндров управляемых скоростью комбайна позволяет стабилизировать подачу массы на обмолот и очистку и, следовательно, иметь более стабильное транспортное запаздывание по подаче зерна в бункер и кроме того предотвращать забивание обмолачивающего барабана.Устройство для сбора данных по урожайности и растительным остаткам для комбайна поясняется следующими схемами, гдефиг. 2 - компоновочная схема размещения датчиков на комбайнефиг.3 функциональная схема блока стабилизации высоты среза комбайнафиг.4 - функциональная схема блока стабилизации ширины захвата жатки (автовождения)фиг.5 - функциональная схема блока стабилизации загрузки комбайнафиг. 6 - электрическая схема включения соленоидов с релейного блока цифро-аналогового преобразователяфиг. 7 - гидравлическая схема привода систем стабилизациифиг. 8 - принципиальная схема датчика подачи зернафиг. 9 - принципиальная схема датчика влажности зернафиг. 10 принципиальная схема датчика потерь зернафиг. 11 - принципиальная схема датчика высоты срезафиг. 12 - принципиальная схема датчика натяжения цепи подающего транспортерафиг. 13 - принципиальная схема датчика поворота управтяемых колесфиг. 14 - принципиальная схема датчика ширины захвата жатки.Устройство для сбора данных по урожайности и растительным остаткам для комбайна(фиг. 1) содержит бортовой компьютер (БК) 1 с клавиатурой 2, монитором 3, аналого-цифровой Преобразователь (АЦП) 4, цифро-аналоговый преобразователь (ЦАП) 5 с релейным блоком, установленным в стандартном разъеме БК 1, радара 6 в качестве датчика для измерения пройденного пути и скорости, датчика подаъш зерна 7, датчика для измерения влажности зерна 8, датчиков потерь зерна 9, датчиков высоты среза 10, датчика натяжения цепи подающего транспортера 11, датчика поворота управляемых колес 12, датчика ширины захвата 13, датчика момента 14 на валу обмолачнвающего барабана, спутниковой антенны 15, приемника 16, соленоидов электроуправляемых гидрозолотников 1722. Размещение датчиков на комбайне показано на фиг, 2.Выходы датчиков 6 14 приемника 16 соединены со входами АЦП 4, а выходы релейного блока ЦАП 5 соединены со входами соленоидов 1722 электроуправляемых гидрораспределителей 24, 26, 28.Устройство сбора данных по урожайности и растительным остаткам содержит следующие блокиблок стабилизации высоты среза комбайна(фиг. 3), состояшшдсиздатчшса высоты среза 10,выходы которого соединены через АЦП 4, БК 1 с ЦАП 5, выходы которого соединены с соленоидами 17, 18 гидрораспределителя 24, соединенного с гидроцилиндрам 25 перемещения жатки (фиг. 7)блок стабилизации ширины захвата жатки(фиг. 4) содержит датчик угла поворота управляемых колес 12, датчик ширины захвата Жатки 13 выходы которых через АЦП 4 БК 1 соединены с ЦАП 5, выходы которого соединены с соленоидами 19, 20 гидрораспределителя 26, гидроцилиндра 27 (фиг. 7) перемещения трапеции 47 управляемых колес - (фиг. 13)блок сгабилизашш загрузки комбайна (фиг. 5) содержит датчик 11 натяжения цепи подающего транспортера, датчик 14 момента на валу обмолачивающего барабана, выходы которого соединены через АЦП 4, БК 1 с входами ЦАП 5,выходы которою соединены с соленоидами 21,22 гидрораспределителя 28, гидроцилиндра 29ЭЛЕКТРИЧЕСКИЕ. схема ВЫХОДНОГО каскада РЕЛЕ включения соленоидов 17-22 показана на фиг. 6. По команде с ЦАП замыкается соответствующий контакт 17 а 22 а и питание подается на Соленоиды 1722.В качестве датчика скорости и пройденного пути 6 используется серийный радар, используемый на комбайне. Электрическая схема приведена в дополнительных материалах к заявке.Датчик подачи зерна 7 (фиг. 8) установлен в элеваторе 31 (фиг. 2), состоит из ультразвукового передатчика 32 и ириемнгша 33. Выходы приемника 33 соединены с входами АЦП 4. По ослаблению сшнала приемника 32 определяется толгцина подаваемого слоя, а затем в БК 1 вьгшсзтяегся подача зерна, велит-ища которой выводится на монитор З и заносится через определенные промежутки в память БК 1.Датчик влажности зерна 8 (фиг .9) установлен в зерновом потоке шнека 34 в бункере комбайна (фиг. 2). Датчик определяет влажность зерна пропорционально изменению емкости конденсатора, установленного в шнеке 34. (Описан в прототипе фиг.5,поз.3) Датчик потерь зерна 9 (фиг. 10) представляет собой набор пьезоэлектрических пластин 9 а,установленных по штарште соломотряса 30 (фиг. 2) на конце каждой клавиши и по ширине очистки в конце удлинителя решет или скатной доски (зависит от конструкции комбайна) и преобразовательното блока 35. Датчгш работает следующим образом. Удары зерен по пьезоэлементам 9 а создают пики напряжений,которые преобразуются блоком 35 в уровень,соответствующий количеству ударов и подаются на АЦП 4, БК 1 и выводятся на монитор 3.Датчик высоты среза 10 (фиг. 11) механически выполнен в виде подпружиненного рычага 36, одно плечо которого перемещается по поверхности поля, а второе с одной стороны соединено с пружиной 37, а с другой стороны со штоком потенциометрического датчика 38,выход которого соединен со входом АЦП 4. Перемещение жатки комбайна через рычаг 36 передается потенциометрическому датчику 38 от него на АЦП 4 Для ограничения перемещения датчика 38 по вертикали и .предохранения от поломок датчика 38 на раме жатки установлен упор 39, а сам рычаг 36 в качестве предохранительного элемента оснащен пружинной вставкой 40.Датчик натяжения цепи подающего транспортера 11 (фиг. 12) выполнен в виде подпружиненного двухплечего рычага 41, одно плечо которого перемещается по нижней ветви подающего транспортера, а второй конец с одной стороны подпружинен пружиной 42, а с другой соединен со штоком потенциометра 43, характеристики которого приведены в дополнительных материалах.Датчик угла поворота управляемых колес 12(фиг. 13) электромеханический выполнен в виде двухплсчсго рычага 44, ось поворота кото 9рого 45 закреплена на балке 46, управляемых колес, один конец соединен с трапецией 47, а другой со штоком потенциометра 48, выход которого соединен с АЦП 4. Угол поворота управляемых колес иксируется потенциометром 48,который перемещается пропорционально углу поворота колес.Датчик ширины захвата жатки 13 (фиг. 14) состоит из ДВУХ Ультразвуковых передатчгшов 49,установленных на делителях жатки 50, которые излучают ультразвуковой сигнал в направлении, поперечном движению комбайна. отраженный сигнал воспринимается этим же передатчиком и ширина захвата определяется путем точного расчета времени между посланными и принятым сигналами.Датчик момента 14 (фиг. 2) установлен на валу обмолачивающего барабана между приводным шкивом и обмолачивающим барабаном. Характеристики датчика момента представлены в дополнительных материалах.Устройство сбора данных по урожайности и растительным остаткам, для комбайна (фиг. 2) работает следующим образом в БК 1 (фиг. 1) заносят характеристики по убираемым культурам, характеристики комбайна, зависимость транспортного запаздывания от соотношения зерно/ солома, влажности убираемой культуры. Перед началом работы оператор заносит в БК 1 задаваемый уровень загрузки комбайна (момент на валу барабана), высоту среза, ширину захвата, наименование культуры, расстояние,через которое данные об урожайшости и растительных остатках будут заносится в БК 1 с координатами этих точек. Затем включают спутниковую антенну 5 и приемник 6, молотильное устройство комбайна, приводы всех необходимых рабочих органов и начинают про цесс комбайнирования. аДля получения информации по урожайности с помощью данных датчиков ширины захвата 13 и скорости 6 определяют убранную площадь, а подачу зерна (собранный с этой площади урожай в единицу времени), определяют с помощью датчика подачи зерна 7 и потерь 9 с соответствующим транспортным запаздыванием, затем производят соответствующие вычисления с учетом влажности зерна по датчику 8, что дает собранный и выращенный (с учетом потерь) урожай с единицы площади через заданные расстояния по ширине и длине(размер решеток). Информация по урожайности и координаты узла решетки заносятся в память БК 1 и эта информация в дальнейшем используется для составления карты урожайности и корректировки коэффициентов в экспертной системе описанной в заявке 5 для расчета доз внесения удобрений,ядохимикатов и посева семян.В ходс работы комбайна стабилизация транспортного запаздывания обеспечивается с помощью блоков стабилизации высоты среза,ширины захвата жатки и загрузки комбайна.Блок стабилизации высоты среза (фиг. 3) работает следующим образом. Сигнал с датчика высоты среза 10 поступает в АЦП 4, преобразуется в цифровой сигнал и сравнивается в БК 1 с заданным. введенным посредством клавиатуры 2, а сигнал рассогласования через ЦАП 5 подается на соленоид 17 или 18 гидрораспределителя 24 управляющего гидроцилиндром 25 перемещающим жатку комбайна по вертикали. Кроме того сигнал с датчика используется для регистрации части растительных остатков (высота стерни) и определения соотношения зерно/ солома для вычисления транспортного запаздывания.Блок стабилизации ширины захвата жатки(автовождения) (фит. 4) работает так. Ширину захвата устанавливают меньше номинальной,за исключением ручьевых жаток во избежание потерь при вождении комбайна. Сшнал датчиха ширины захвата жатки 13 поступает через АЦП 4 в БК 1, где сравнивают с заданным,через клавиатуру 2, а сигнал рассогласования через ЦАП 5 подают на соленоид 19-20 (фиг. 7) гидрораспределителя 26, управляющего гидроцилиндром 27 перемещающий трапецию 47 управляемых колес. Датчик угла поворота управляемых колес 12 обеспечивает возврат управляемых колес в нейтральное положение. После того как исчезает сигнал рассогласования от датчика ширины захвата жатки 13,сигнал датчика угла поворота управляемых колес 12 через АЦП 4, БК 1 сравнивается с заданным, нейтральным положением, а сшнал рассогласования через ЦАП 5 подастся на соленоиды 19 или 20 гидрораспределителя 26 гидроцилиндрам 27 привода трапеции 47 управляемых колес для перевода их в нейтральное положение.Сигнал от датчика Ширины захвата 13 учитывается при расчете урожайности (ширина захвата умноженная на скорость движения определяет площадь в единицу времени), Блок сгабилит загрузки комбайна (фиг. 5),стабилизирует загрузку момента на валу обмолачивающею барабана. Сигнал с датчика момента 14 и датчика натяжения цепи 11 через АЦП 4 поступают в БК 1, гдесравниваготся с заданным уровнем загрузки молотилки. Для датчика момента 14 загрузка (80, 90,95), а для датчика натяжения цепи 11 опенивается уменьшение или увеличение сигнала по сравнению с предыдущим съемом, а затем сигнал рассогласования с датчика момента 14 через ЦАП 5 подается к соленоиду 21 или 22 гидрозолотника 28 гидроцилиндра 29, перемещающего рукоятку управления скоростью
МПК / Метки
МПК: A01D 41/12
Метки: комбайна, урожайности, устройство, сбора, данных
Код ссылки
<a href="https://by.patents.su/8-1422-ustrojjstvo-dlya-sbora-dannyh-po-urozhajjnosti-dlya-kombajjna.html" rel="bookmark" title="База патентов Беларуси">Устройство для сбора данных по урожайности для комбайна</a>
Устройство для сбора нефти с поверхности воды
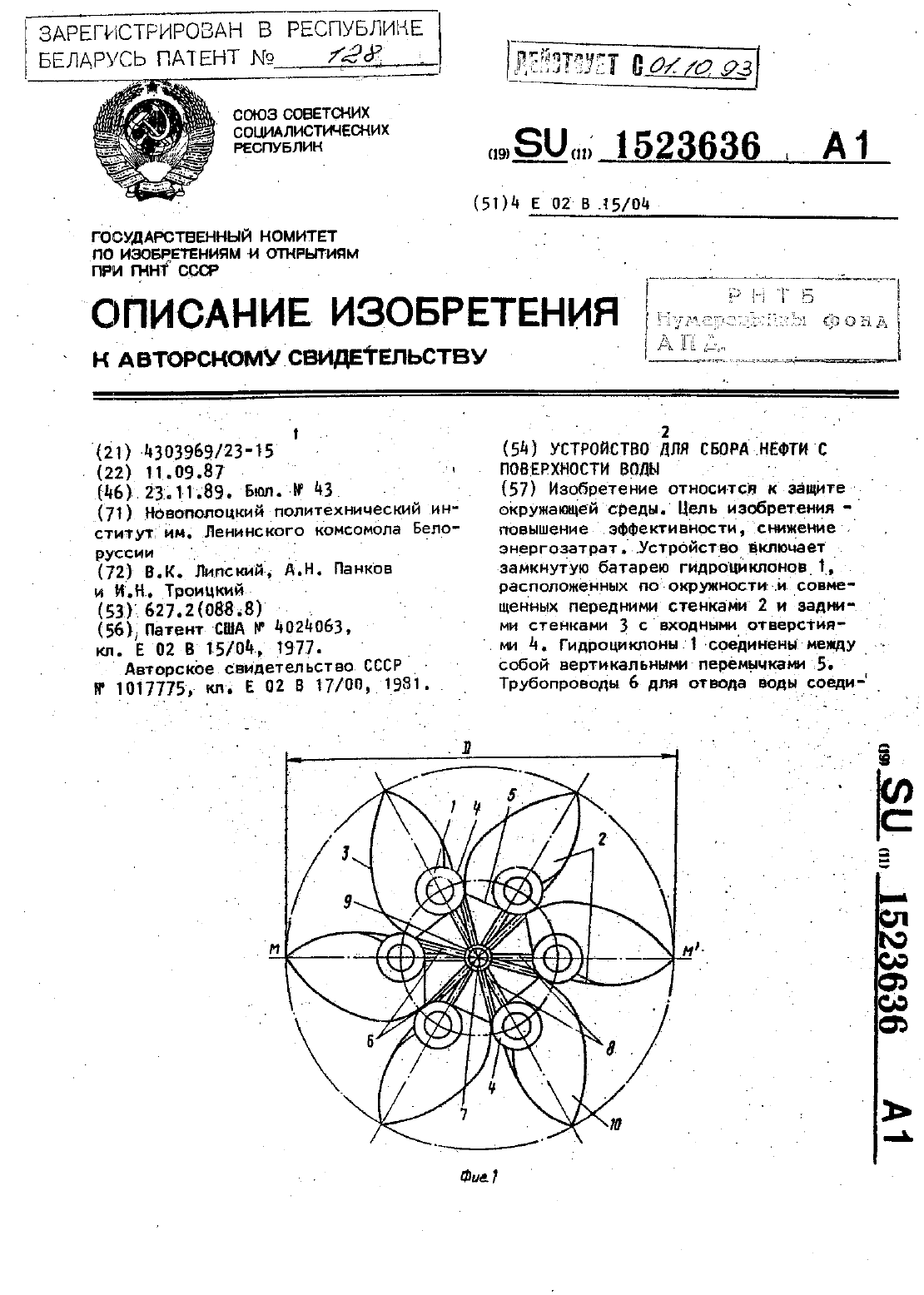
Номер патента: 128
Опубликовано: 30.09.1994
Авторы: Панков А. Н., Липский В. К., Троицкий И. Н.
МПК: E02B 15/04
Метки: поверхности, воды, сбора, нефти, устройство
Текст:
...слой нефти, так, что плоскость свободной поверхности жидлкости пересекает входные КЭНЛЫъ Это-достигается-путем заполнения балла стом (налимер, водой) камер устрой-о ства. После включения.сливачистойводаоткачивается из рабочих объенов сидроциклонов 1 через трубопроводы 6 нистой воды и коллектор 7 во вода, имеющая на своей поверхности пленку нефти.Это ПРОИСХОДИТ За СЧЕТ вгидроциклонов. Точками, в-которых окружающая жидкость разделяется на...
Устройство для сбора нефти с поверхности воды в водотоках
Номер патента: 134
Опубликовано: 30.09.1994
Авторы: Макаров Л. И., Сташкевич В. Г., Липский В. К., Троицкий И. Н.
МПК: E02B 15/04
Метки: устройство, сбора, водотоках, нефти, воды, поверхности
Текст:
...использовании устройства в жидкости, и граница раздела между комплекте с боновьлм заграждением нефтьи и водой находились выше нижне 35 (фиг. 6) устройство может быть вьшолго края входного отверстия 2 корпу- нено с входным каналом, примыкающим са 1. При этом экран 7 устанавливают й к экрану (фиг. 4), или для повышения перпендикулярно Направлению потока. 3, эффективности за счет увеличения обВода, несущая на своей поверхности пасти сбора нефти,...
Противоблокировочное устройство для тормозной системы транспортного средства
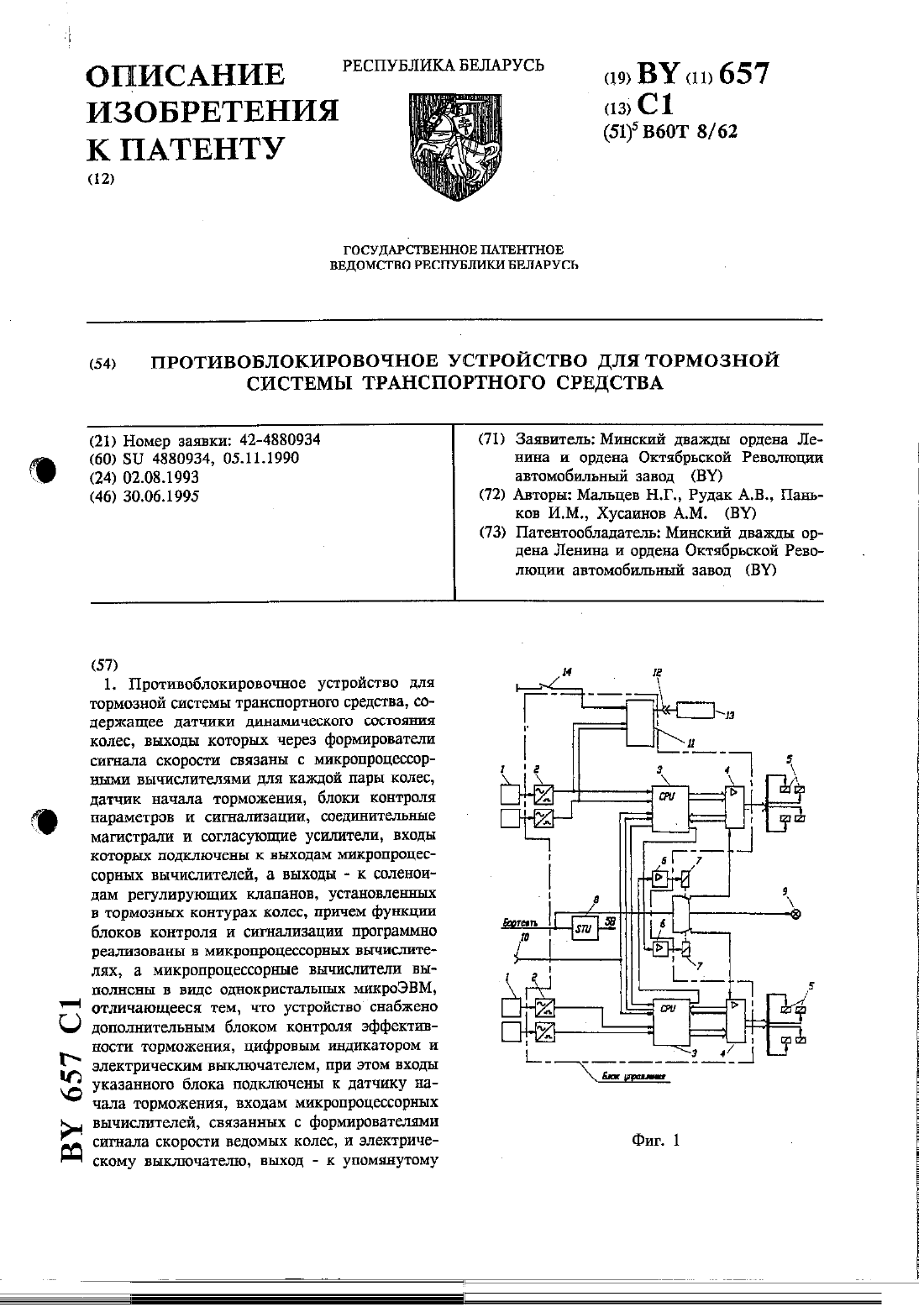
Номер патента: 657
Опубликовано: 30.06.1995
Авторы: Мальцев Н. Г., Паньков И. М., Рудак А. В., Хусаинов А. М.
МПК: B60T 8/62
Метки: системы, тормозной, транспортного, противоблокировочное, устройство, средства
Текст:
...колес, и электрическому выключателю, выход - к упомянутому цифровому индикатору, а сам бЛОК ВЫПОЛНСН В ВИДЕ СВЯЗЗННЫХ магистралями входного мультиплексора, счетчиков числа оборотов колес и времени торможения,тактового генератора, узла определения начала торможения, арифметика-логического устройства, элемента И и дополнительного вывода для подключения цифрового индикатора, причем входы счетчика времени торможения связаны с одним из...
Устройство для ориентированной подачи радиодеталей
Номер патента: 283
Опубликовано: 30.12.1994
Авторы: Лауткин Д. А., Ремов Л. М.
МПК: H05K 13/02
Метки: радиодеталей, подачи, устройство, ориентированной
Текст:
...которого расположена параллельно дну виброплитьа 2.Устройство для ориентированной под ачи радиодеталей работает следующим об разом. Радиодетали 14. например заготовкикерамических конденсаторов. загружают навалом в вибробункер 1. низ которого они поступают на площадку 7 выброплиты 2 под действием вибратора 6 перемещаются в зону входных окон 8. В окнах 8 детали 14 занимают горизонтальное или вертикальное положение (см. фиг. 4 и 5). В...
Устройство для загрузки изделий, преимущественно радиодеталей
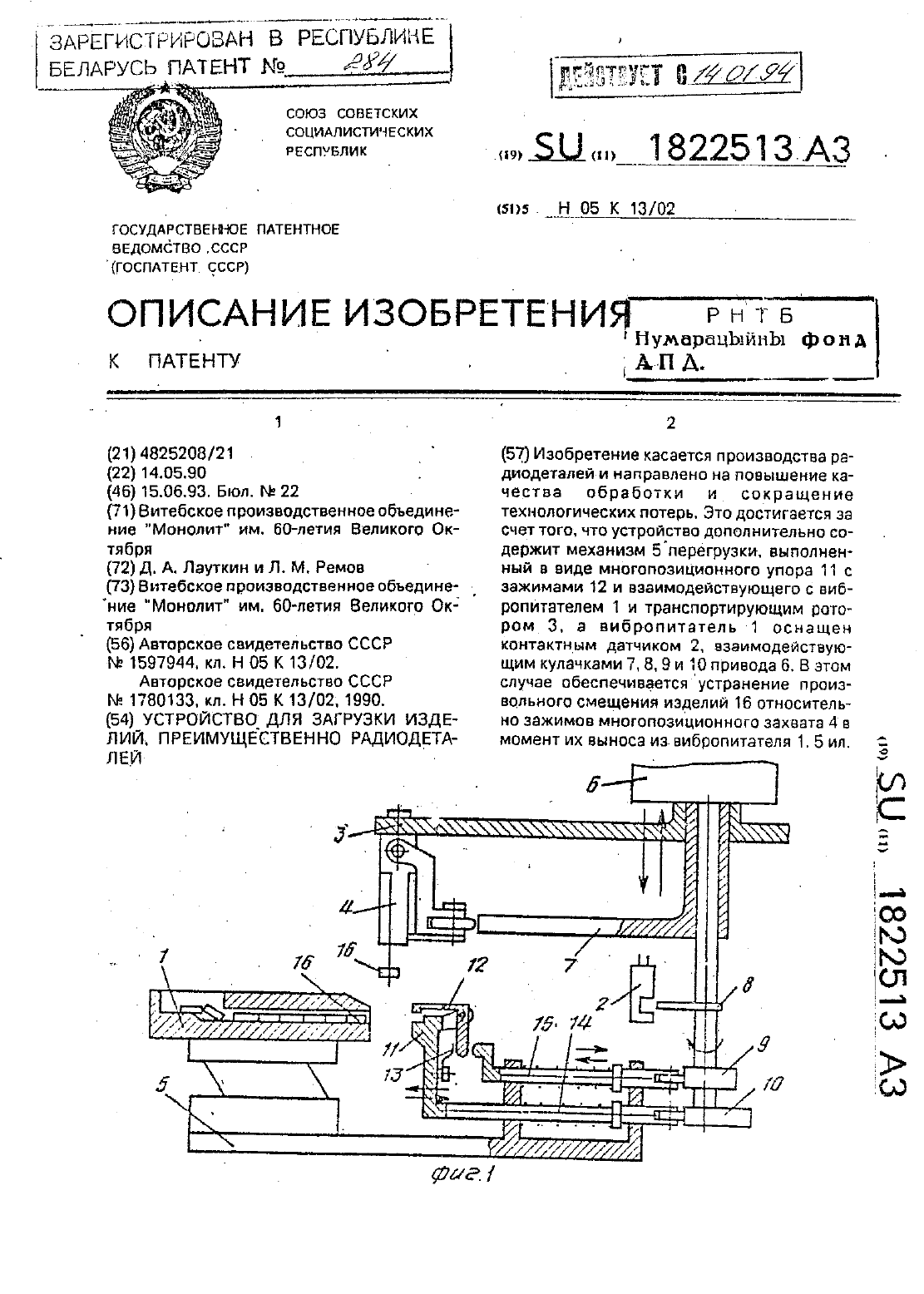
Номер патента: 284
Опубликовано: 30.12.1994
Авторы: Лауткин Д. А., Ремов Л. М.
МПК: H05K 13/02
Метки: изделий, устройство, преимущественно, загрузки, радиодеталей
Текст:
...на нем зажимами 12 в крайнее левое положение (см. фиг. 2 ) имольном рЭССТОЯНИИ ОТ МНОГОРУЧЬЭВОГО вибропитателя 1. Кулачок 9 через шток 15 нажимает на вертикальные плечи зажимов 12 и обеспечивает отходов их заэкимных губок от пиногопозиционного упора П. Кулачок 8 взаимодействует с контактным датчиком 2 и включает электропитание многоручьевого вибропитателп 1. Под действи ем вибрации первый ряд изделий 16частично выходит с каналов...
Предыдущий патент: Способ получения волокнистых конструкционных элементов и устройство для его осуществления
Следующий патент: Светильник
Случайный патент: Способ упрочнения рессоры и устройство для его осуществления