Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 11050
Опубликовано: 30.08.2008
Авторы: Горбатенко Николай Николаевич, Плякин Роман Владимирович, Тарасик Владимир Петрович, Пузанова Ольга Владимировна, Рынкевич Сергей Анатольевич

Текст
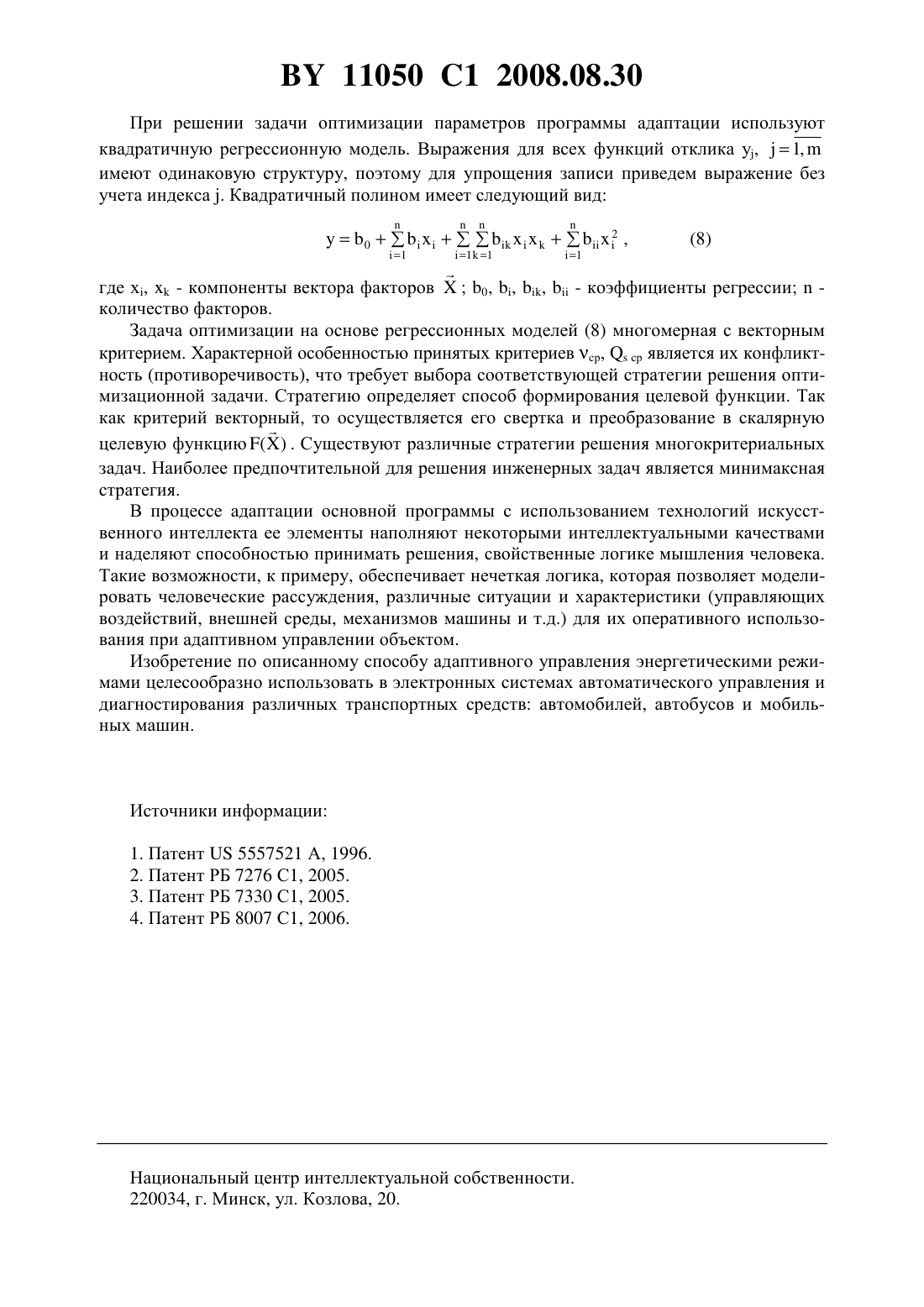
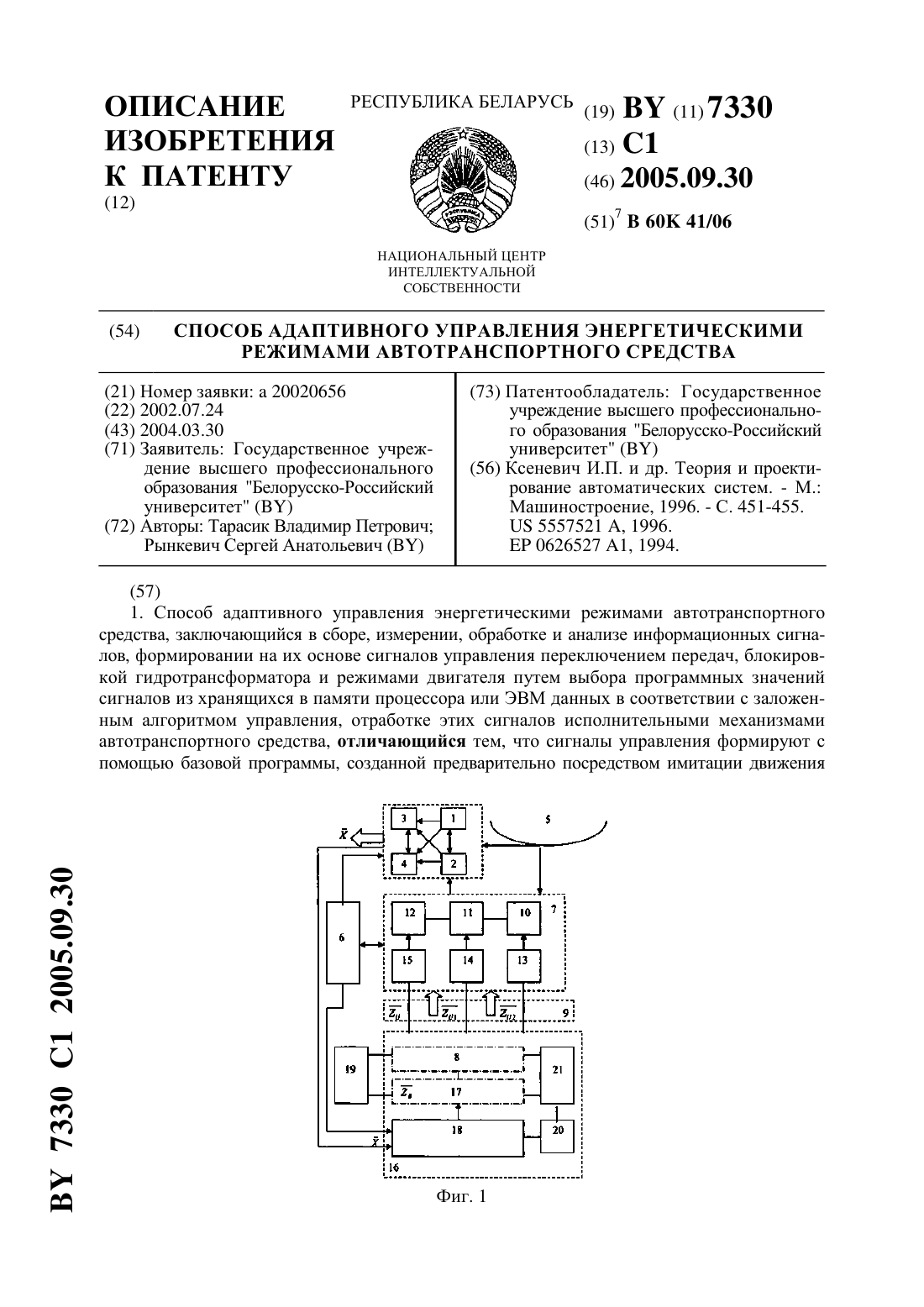
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКИМИ РЕЖИМАМИ АВТОТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Тарасик Владимир Петрович Горбатенко Николай Николаевич Рынкевич Сергей Анатольевич Пузанова Ольга Владимировна Плякин Роман Владимирович(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) 1. Способ адаптивного управления энергетическими режимами автотранспортного средства, заключающийся в том, что собирают, измеряют, обрабатывают и анализируют информационные переменные, характеризующие параметры движения автотранспортного средства, режимы работы его механизмов, внешнюю среду и воздействия водителя, формируют программы управления переключением передач, блокированием гидротрансформатора и режимами двигателя, которые отрабатывают соответствующими исполнительными механизмами, причем для формирования программы управления осуществляют предварительное математическое моделирование процессов движения автотранспортного средства 11050 1 2008.08.30 в широком диапазоне условий с учетом множества факторов, характеризующих изменчивость воздействий водителя и внешней среды, программу управления выполняют в виде основной программы и элементов ее адаптации в виде корректирующей программы основную программу выполняют реализующей базовые характеристики управления, а элементы адаптации - корректирующей основную программу с учетом нештатных режимов,к которым относят управляющие воздействия водителя, изменения характеристик дорожных условий и состояние механизмов автотранспортного средства, при этом основную программу формируют на основе регрессионных зависимостей между информационными переменными и базовыми характеристиками управления, отличающийся тем, что в моделируемых условиях движения, наиболее характерных для данного типа автотранспортного средства, реализуемыми базовыми характеристиками управления обеспечивают высокую динамику разгона автотранспортного средства при высоком уровне нажатия на педаль акселератора и высокую топливную экономичность при низком или среднем уровне нажатия на педаль акселератора при адаптации основной программы дополнительно учитывают изменение уровня загрузки автотранспортного средства, температурный режим двигателя,механизмов трансмиссии и снижение мощностных характеристик двигателя к нештатным режимам управляющих воздействий водителя относят резкие манипулирования педалью акселератора, преднамеренные или непреднамеренные воздействия на органы управления тормозными механизмами и резкие повороты рулевого колеса к изменениям характеристик дорожных условий относят чередование крутых подъемов и спусков, а также крутых поворотов, обусловливающих большие боковые ускорения автотранспортного средства. 2. Способ по п. 1, отличающийся тем, что элементы адаптации основной программы реализуют методами технологий искусственного интеллекта или функциональных зависимостей параметров основной программы от параметров автотранспортного средства,внешней среды и управляющих воздействий водителя. Изобретение относится к транспортному машиностроению, а именно к системам автоматического управления транспортными средствами. Известна система автоматического управления, реализующая способ управления энергетическими режимами транспортного средства 1. Известны способы адаптивного управления энергетическими режимами, реализующие нечеткую логику управления, заключающиеся в сборе, измерении и анализе информационных сигналов для осуществления управления переключением передач, блокированием гидротрансформатора, режимами двигателя путем выбора по заложенным алгоритмам управления значений сигналов управления из базовой программы и отработки сигналов управления исполнительными механизмами автотранспортного средства 2, 3. Известен способ интеллектуального управления энергетическими режимами автотранспортного средства, заключающийся в сборе информации,измерении, обработке и анализе характеристик информационных параметров, формировании базовой программы управления в виде управляющих сигналов переключения передач,блокирования гидротрансформатора, режимов двигателя и тормозной системы, отработке программы управления исполнительными механизмами 4. Особенностью отмеченных технических решений является их невозможность одновременного полного учета многообразия информационных переменных, характеризующих внешнюю среду, дорожные условия и управляющие воздействия водителя, а также параметры автотранспортного средства для текущего контроля состояния его механизмов. В результате снижается эффективность автоматического управления и безопасность движения. Другой особенностью отмеченных выше способов является то, что их возможности адаптации ограничены из-за того, что в базовой программе не предусмотрена возможность улучшения динамики разгона автотранспортного средства при большом уровне нажатия на педаль акселератора и улучшения топливной экономичности при низком и 2 11050 1 2008.08.30 среднем уровнях нажатия на педаль акселератора. В результате снижается надежность управления и ухудшаются показатели эффективности. Задачами изобретения являются повышение надежности управления, расширение функциональных возможностей систем автоматического управления энергетическими режимами транспортных средств, улучшение их показателей эффективности и повышение безопасности движения. Указанные задачи достигаются тем, что в способе адаптивного управления энергетическими режимами автотранспортных средства, заключающемся в том, что собирают, измеряют, обрабатывают и анализируют информационные переменные, характеризующие параметры движения автотранспортного средства, режимы работы его механизмов, внешнюю среду и воздействия водителя, формируют программы управления переключением передач, блокированием гидротрансформатора и режимами двигателя, которые отрабатывают соответствующими исполнительными механизмами, причем для формирования программы управления осуществляют предварительное математическое моделирование процессов движения автотранспортного средства в широком диапазоне условий с учетом множества факторов, характеризующих изменчивость воздействий водителя и внешней среды, программу управления выполняют в виде основной программы и элементов ее адаптации в виде корректирующей программы основную программу выполняют реализующей базовые характеристики управления, а элементы адаптации - корректирующей основную программу с учетом нештатных режимов, к которым относят управляющие воздействия водителя,изменения характеристик дорожных условий и состояние механизмов автотранспортного средства, при этом основную программу формируют на основе регрессионных зависимостей между информационными переменными и базовыми характеристиками управления,согласно изобретению, в моделируемых условиях движения, наиболее характерных для данного типа автотранспортного средства, реализуемыми базовыми характеристиками управления обеспечивают высокую динамику разгона автотранспортного средства при высоком уровне нажатия на педаль акселератора и высокую топливную экономичность при низком и среднем уровне нажатия на педаль акселератора при адаптации основной программы дополнительно учитывают изменение уровня загрузки автотранспортного средства, температурный режим двигателя, механизмов трансмиссии и снижение мощностных характеристик двигателя к нештатным режимам управляющих воздействий водителя относят резкие манипулирования педалью акселератора, преднамеренные и непреднамеренные воздействия на органы управления тормозными механизмами и резкие повороты рулевого колеса к изменениям характеристик дорожных условий относят чередование крутых подъемов и спусков, а также крутых поворотов, обусловливающих большие боковые ускорения автотранспортного средства. При этом элементы адаптации основной программы реализуют методами технологий искусственного интеллекта или функциональных зависимостей параметров основной программы от параметров автотранспортного средства,внешней среды и управляющих воздействий водителя. Сущность изобретения поясняется схемой. На фигуре представлен способ адаптивного управления энергетическими режимами. Способ адаптивного управления энергетическими режимами реализуется на схеме. На фигуре показано транспортное средство, снабженное двигателем 1, гидротрансформатором 2, коробкой передач 3, главной передачей и колесами (на фиг. 1 условно не обозначены),которое эксплуатируется в условиях внешней среды. Для сбора и измерения всевозможной информации о параметрах и характеристиках управляющих воздействий водителя,механизмах и режимах транспортного средства, внешней среды и ситуаций используются различные датчики положения педалей акселератора 4 и тормоза 5, угловой скорости вала двигателя 6, входного 7 и выходного 8 валов коробки передач 3, рулевого колеса 9, датчики состояния муфты блокирования 10 гидротрансформатора 2 и фрикционных муфт 11 коробки передач 3, бокового ускорения 12 и скорости 13 машины, степени загрузки 14,температуры 15 двигателя и трансмиссии, характеристик дорожных условий 16 и внешней 3 11050 1 2008.08.30 среды 17 (макро- и микропрофиля поверхности дороги, уклона, коэффициента сопротивления, различных ситуаций и т.д.). Собираемая датчиками информация используется при формировании программы управления энергетическими режимами, причем программа управления включает основную(базовую) программу и элементы адаптации основной программы к нештатным режимам. Собираемая датчиками информация используется также при определении технического состояния механизмов автотранспортного средства, т.е. при диагностировании. Основную программу управления формируют на основе имитационного моделирования посредством ЭВМ 18 транспортного средства в модельных (типовых) условиях его движения. Основная программа представляет собой базовые характеристики управления переключением передач и блокированием гидротрансформатора, характеристики управления скоростными режимами двигателя, характеристики управления фрикционами переключения передач. При формировании основной программы используется методология математического моделирования и оптимизации параметров сложных технических систем,регрессионный и корреляционный анализ, новые информационные технологии и другие методы. Для формирования характеристик адаптации 19 базовой программы к различным режимам также проводят комплекс научных исследований с использованием ЭВМ и математического моделирования. Поступающая от датчиков информация обрабатывается в бортовом процессоре 20, в котором хранятся основная программа (в виде регрессионных зависимостей между информационными переменными и базовыми характеристиками управления либо в виде цифровых файлов информации) и элементы ее адаптации. В итоге формируются управляющие сигналы 21 для отработки исполнительными механизмами управления энергетическими режимами машины трансмиссией 22, гидротрансформатором 23 и двигателем 24. Рассмотрим сущность и методику синтеза основной программы и элементов ее адаптации, которая является основой способа управления энергетическими режимами. Эта программа нуждается в последующей адаптации к непрерывно изменяющимся условиям функционирования, в которых находится транспортное средство, оснащенное системой автоматического управления (САУ). В этом случае предварительно получают программу с базовыми характеристиками управления, которая затем дополняется адаптивными качествами (корректируется посредством корректирующей программы) с применением новейших технологий и методов теории искусственного интеллекта и реализуется в виде управляющей программы контроллера САУ. Процесс реализации способа управления энергетическими режимами состоит из нескольких этапов. Основные этапы этого процесса 1) построение математической модели движения транспортного средства в условиях внешней среды 2) обоснование и выбор вида основной программы управления и информационных переменных 3) определение оптимальных параметров характеристик основной программы управления по выбранному критерию оптимальности на расчетном режиме 4) моделирование движения транспортного средства в различных дорожных условиях и выявление зависимостей параметров характеристик основной программы управления от параметров машины, внешней среды и управляющих воздействий водителя 5) корреляционный анализ зависимостей параметров характеристик основной программы от параметров машины, внешней среды и управляющих воздействий водителя, а также выбор информационных переменных, необходимых для адаптации основной программы 6) регрессионный анализ результатов математического моделирования движения транспортного средства и получение регрессионных моделей, устанавливающих зависимости между принятыми информационными переменными и параметрами основной программы 4 11050 1 2008.08.30 7) применение технологии искусственного интеллекта для получения элементов адаптации программы (например, использование нечеткой логики или искусственных нейронных сетей) 8) вывод решения на основе технологии искусственного интеллекта и получение выходного сигнала управления, обеспечивающего адаптацию алгоритма управления к условиям функционирования транспортного средства. Рассмотрим содержание отдельных этапов реализации способа применительно для системы управления гидромеханической передачей (ГМП) автомобиля, включающей в себя механическую коробку передач и гидротрансформатор. САУ гидромеханической передачей осуществляет переключение ступеней в коробке передач и блокирование гидротрансформатора. Автоматизированная система управления ГМП должна обеспечить высокие показатели эффективности использования машины при выполнении конкретной транспортной работы, надежность функционирования всех механизмов системы и безопасность движения АТС, снижать динамические нагрузки. Основные показатели эффективности - средняя скорость движения на маршруте и средний путевой расход топлива ср и. Эти показатели принимаются в качестве критериев оптимальности при оценке качества процесса функционирования САУ. На стадии получения основной программы используется детерминированная математическая модель транспортного средства, описывающая его физические свойства и обеспечивающая имитацию движения в заданных дорожных условиях. Назначение этой модели оценить влияние параметров внешней среды и управляющих воздействий водителя на режимы движения автомобиля и определить оптимальные характеристики переключения ступеней и блокирования гидротрансформатора по соответствующим критериям. Выбор критериев оптимальности базовых характеристик осуществляется исходя из следующих условий. Для достижения максимальной средней скорости движения на заданном маршруте необходимо, чтобы в каждый данный момент времени реализовывалось максимально возможное ускорение, а для получения минимального путевого расхода топлива достигался минимум отношения часового расхода топлива двигателя к ускорению машины. Первый критерий является критерием динамичности разгона, а второй - критерием экономичности. По этим критериям определяют оптимальные условия переключения ступеней коробки передач и блокирования гидротрансформатора и находят соответственно динамичную и экономичную программы управления. Любая из этих программ может быть принята в качестве основной. Динамичная программа обеспечивает высокую динамику разгона при большом уровне нажатия на педаль акселератора, а экономичная - высокую топливную экономичность при низком и среднем уровнях нажатия на педаль акселератора. Основная программа управления ГМП представляет собой совокупность характеристик, устанавливающих зависимости между скоростями, при которых переключаются передачи и блокируется гидротрансформатор, и положением педали акселератора. Информационными переменными при реализации основной программы управления являются скорость автомобиля и положение педали акселератора. Пороговые значения скоростей,соответствующие оптимальным условиям формирования сигналов управления, представляют собой параметры базовых характеристик управления. Основная программа управления представляет собой совокупность характеристик вида где а - относительная координата положения педали акселератора, значение которой находится в пределах 0 а 1- пороговое значение скорости машины, при достижении которого в процессе разгона осуществляется переключение передач либо блокирование гидротрансформатора- количество характеристик, равное суммарному количеству переходов между передачами и передач, на которых осуществляется блокирование гидротрансформатора 5 пп - количество переходов с низших на высшие передачи бл - количество передач,на которых блокируется гидротрансформатор. Но полученные таким путем характеристики основной программы будут оптимальными лишь для конкретных условий. Изменения дорожных условий (сопротивления качению,продольного уклона дороги), параметров транспортного средства (мощности двигателя,технического состояния трансмиссии, подвески и других механизмов), характеристик управляющих воздействий водителя на органы управления машиной (педали акселератора и тормоза) приводят к необходимости существенного изменения характеристик управления. Поэтому основную программу управления необходимо постоянно корректировать,т.е. адаптировать к изменяющимся условиям. Возникает необходимость выявления зависимостей параметров основной программы управления от параметров машины, внешней среды и управляющих воздействий водителя. Информацию об этих зависимостях получают путем моделирования движения машины, варьируя соответствующими факторами объекта управления и внешней среды и определяя при этом оптимальные параметры управления. Эта информация затем используется для выбора информационных переменных, принимаемых в элементах адаптации программы управления. Поскольку количество факторов, влияющих на характеристики управления, сравнительно велико, то используемое количество информационных переменных ограничивают. С этой целью полученная в процессе моделирования информация подвергается корреляционному анализу. При корреляционном анализе выявляют линейные корреляционные связи между каждой парой исследуемых информационных переменных , , а также между параметрами характеристик базовой программы управленияи каждой информационной переменной . Оценка корреляционной связи между информационными переменными осуществляется по величинам коэффициентов парной корреляциипо формуле где- количество проведенных вычислительных опытов (объем выборки),средние квадратические отклонения переменных х и х,- математические ожидания этих же переменных х,значения переменных х и х, в -ом опыте, т.е. элементы выборки исследуемых переменных- количество информационных переменных (параметров автомобиля и внешней среды, оказывающих влияние на параметры характеристик базовой программы). Аналогично вычисляются коэффициенты корреляциимеждуи х где,- среднее квадратическое отклонение и математическое ожидание параметра-ой характеристики базовой программы управления- значение параметра этой характеристики в -м опыте- количество характеристик базовой программы управления. Значения коэффициентов парной корреляции находятся в пределах - 11. Чем ближе по абсолютной величине значение коэффициента корреляции к единице,тем более тесная корреляционная связь между исследуемыми переменными. Если значениеблизко к единице, одну из информационных переменных х или х можно исключить из модели алгоритма управления. Исключать рекомендуется ту переменную, которая имеет меньшую корреляцию с параметром характеристики управления , т.е. переменную с меньшим коэффициентом корреляции. 11050 1 2008.08.30 Для установления функциональной связи между переменнымии х результаты моделирования подвергают регрессионному анализу. В результате получают уравнения регрессий вида где- коэффициенты регрессии- порядок полинома. На следующей стадии реализации способа управления осуществляют получение адаптивной корректирующей программы (здесь может использоваться теория искусственного интеллекта, математический аппарат теории нечетких множеств и нечеткой логики, искусственных нейронных сетей и т.д.). При этом кроме отобранных на предыдущей стадии информационных переменных, оказывающих влияние на параметры базовых характеристик,можно использовать также информационные переменные, позволяющие контролировать процесс функционирования механизмов машины, изменение мощностных характеристик двигателя, уровень загрузки транспортного средства, отслеживать температурный режим механизмов, учитывать ограничения, предусмотренные инструкцией по эксплуатации,распознавать особенности поведения водителя и т.п. Ряд информационных переменных служат в качестве диагностических и контролирующих параметров, которые используются при определении текущего технического состояния механизмов автотранспортного средства с осуществлением также контроля и мониторинга, причем эти параметры являются основой для предотвращения опасных ситуаций и прогнозирования ресурса машины. В связи с переменчивостью условий эксплуатации транспортного средства элементы адаптации программы целесообразно оптимизировать. Оптимизацию параметров адаптации проводят на основе экспериментальной факторной (регрессионной) модели. Регрессионную модель получают путем проведения вычислительного эксперимента на исходной теоретической модели объекта исследования. Эксперимент планируют, а результаты его подвергают регрессионному анализу, посредством которого определяют параметры модели. Построение экспериментальных факторных моделей включает несколько этапов выбор функций отклика выбор факторов выбор структуры модели построение плана эксперимента проведение эксперимента регрессионный анализ результатов эксперимента и получение численных значений параметров модели оценка пригодности полученной модели для решения поставленной задачи. Структуру регрессионной модели выбирают исходя из общего представления о физических свойствах исследуемого объекта. Наиболее часто уравнения регрессионной модели представляют в виде многомерных полиномов первого или второго порядков. Аргументы полиномов называют факторами и обозначают х,1,, а искомые функции - функциями отклика и обозначают у,1,. В качестве функций отклика принимают критерии эффективностии. Для получения моделей первого порядка достаточно варьировать факторы на двух уровнях, а для моделей второго порядка - не менее чем на трех уровнях. Факторы нормируют, а их уровни кодируют. В кодированном виде верхний уровень обозначают 1,нижний - 1, а основной (в центре эксперимента) 0. Нормирование факторов осуществляют на основе соотношения(6)(0 ) /,1,,где х - нормированное значение -го фактора- натуральное значение -го фактора 0 натуральное значение фактора в центре эксперимента Х - интервал варьирования -го фактора / 2,1,,(7) Х и Х - минимальный и максимальный уровни -го фактора. 11050 1 2008.08.30 При решении задачи оптимизации параметров программы адаптации используют квадратичную регрессионную модель. Выражения для всех функций отклика у,1,имеют одинаковую структуру, поэтому для упрощения записи приведем выражение без учета индекса . Квадратичный полином имеет следующий вид где х,- компоненты вектора факторов 0, , ,- коэффициенты регрессииколичество факторов. Задача оптимизации на основе регрессионных моделей (8) многомерная с векторным критерием. Характерной особенностью принятых критериев ср,ср является их конфликтность (противоречивость), что требует выбора соответствующей стратегии решения оптимизационной задачи. Стратегию определяет способ формирования целевой функции. Так как критерий векторный, то осуществляется его свертка и преобразование в скалярную целевую функцию. Существуют различные стратегии решения многокритериальных задач. Наиболее предпочтительной для решения инженерных задач является минимаксная стратегия. В процессе адаптации основной программы с использованием технологий искусственного интеллекта ее элементы наполняют некоторыми интеллектуальными качествами и наделяют способностью принимать решения, свойственные логике мышления человека. Такие возможности, к примеру, обеспечивает нечеткая логика, которая позволяет моделировать человеческие рассуждения, различные ситуации и характеристики (управляющих воздействий, внешней среды, механизмов машины и т.д.) для их оперативного использования при адаптивном управлении объектом. Изобретение по описанному способу адаптивного управления энергетическими режимами целесообразно использовать в электронных системах автоматического управления и диагностирования различных транспортных средств автомобилей, автобусов и мобильных машин. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60W 10/00
Метки: способ, управления, режимами, автотранспортного, энергетическими, средства, адаптивного
Код ссылки
<a href="https://by.patents.su/8-11050-sposob-adaptivnogo-upravleniya-energeticheskimi-rezhimami-avtotransportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Способ адаптивного управления энергетическими режимами автотранспортного средства</a>
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7276
Опубликовано: 30.09.2005
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B60K 41/06
Метки: адаптивного, энергетическими, режимами, управления, способ, средства, автотранспортного
Текст:
...движению автотранспортного средства, обусловленных внешней средой и объектами транспортного потока нештатных и опасных дорожных ситуаций реакций автотранспортного средства на управляющие воздействия параметров скоростных режимов движения автотранспортного средства особенностей управления автотранспортным средством, обусловленных стилем, навыками вождения и квалификацией водителя уровня загрузки автотранспортного средства допустимых...
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7330
Опубликовано: 30.09.2005
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B60K 41/06
Метки: способ, автотранспортного, режимами, энергетическими, средства, адаптивного, управления
Текст:
...зависимостей параметров характеристик базовой программы управле 4 7330 1 2005.09.30 ния от параметров автомобиля, внешней среды и управляющих воздействий водителя корреляционный анализ зависимостей параметров характеристик базовой программы от параметров автомобиля, внешней среды и управляющих воздействий водителя и выбор дополнительных информационных переменных, необходимых для адаптации базовой программы регрессионный анализ результатов...
Способ интеллектуального управления энергетическими режимами автотранспортного средства и система для его реализации

Номер патента: 8007
Опубликовано: 30.04.2006
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/06, F16H 61/02
Метки: система, энергетическими, средства, режимами, управления, интеллектуального, реализации, способ, автотранспортного
Текст:
...интеллектуального контроллера на основе нечеткой логики или с использованием других технологий искусственного интеллекта. Контроллер имеет блок ввода и интерпретации информационных сигналов, блок базы данных и правил, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и интерпретации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Тарасик Владимир Петрович, Андрияненко Юрий Анатольевич, Коробкин Владимир Андреевич, Рынкевич Сергей Анатольевич
МПК: B65K 41/00
Метки: управления, машины, энергетическими, интеллектуального, мобильной, режимами, адаптивного, система
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Способ адаптивного управления тягово-скоростными режимами движения мобильного средства
Номер патента: 9706
Опубликовано: 30.08.2007
Авторы: Пузанова Ольга Владимировна, Дычкин Иван Михайлович, Тарасик Владимир Петрович, Животов Максим Сергеевич, Абди Павел Хассенович
МПК: B60W 10/00
Метки: адаптивного, режимами, мобильного, движения, управления, способ, средства, тягово-скоростными
Текст:
...поправку координаты положения педали подачи топлива, по которой корректируют значение координаты положения полностью нажатой педали подачи топлива, после выполнения алгоритма адаптации отображают на информационном табло блока индикации информацию о полученных скорректированных значениях упомянутых параметров, характеризующих внешнюю скоростную и предельную регуляторную характеристики двигателя с занесением этих параметров в базу данных...
Предыдущий патент: Шихта для получения кубического нитрида бора
Следующий патент: Способ получения регулируемого напряжения постоянного тока
Случайный патент: Забивная свая