Способ определения курсового угла маловысотного летательного аппарата, движущегося за горизонтом Земли
Номер патента: 17272
Опубликовано: 30.06.2013
Авторы: Липлянин Антон Юрьевич, Ивашко Владимир Михайлович, Воинов Валерий Васильевич, Иващенко Инга Анатольевна, Сасим Евгений Николаевич
Текст
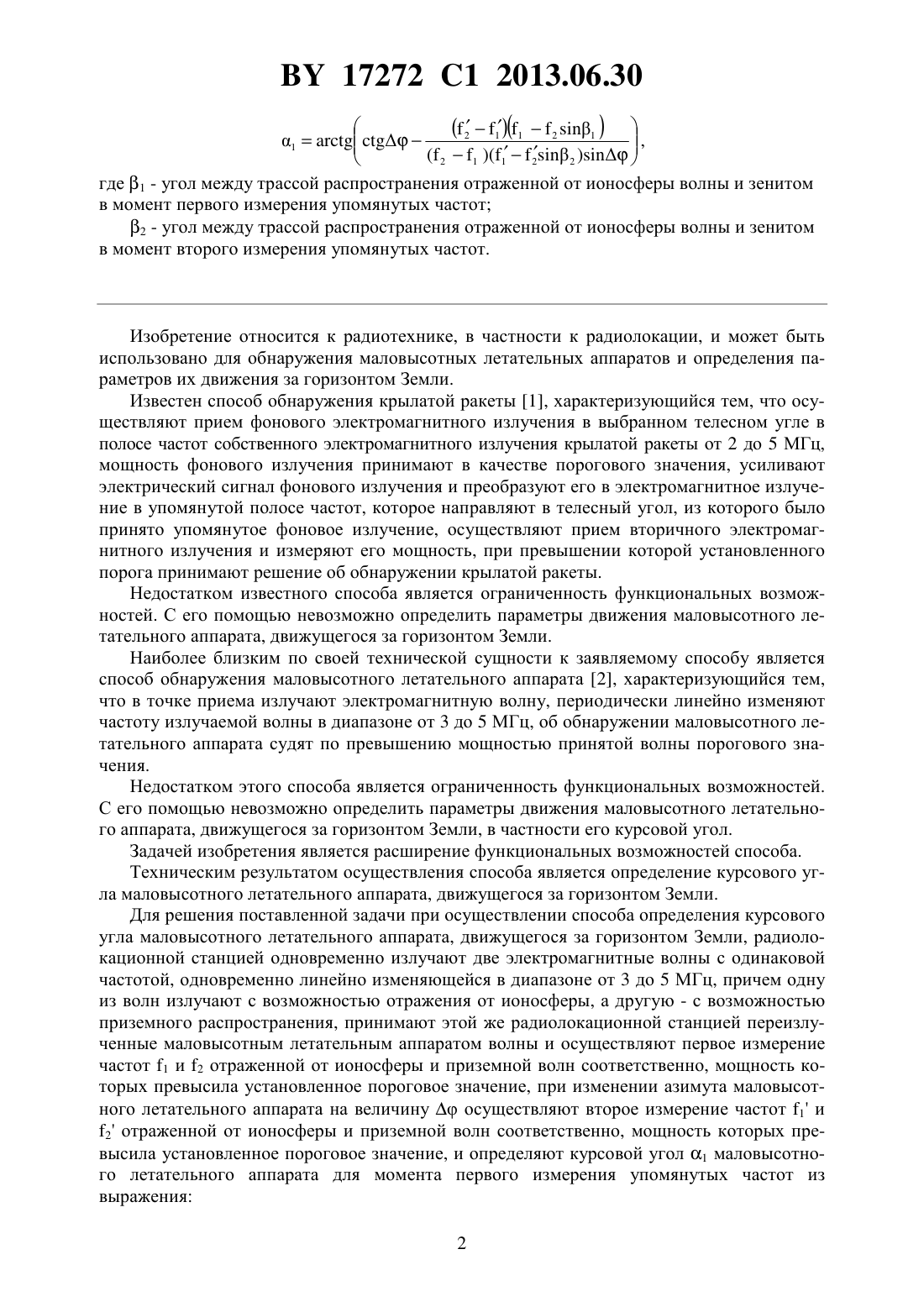
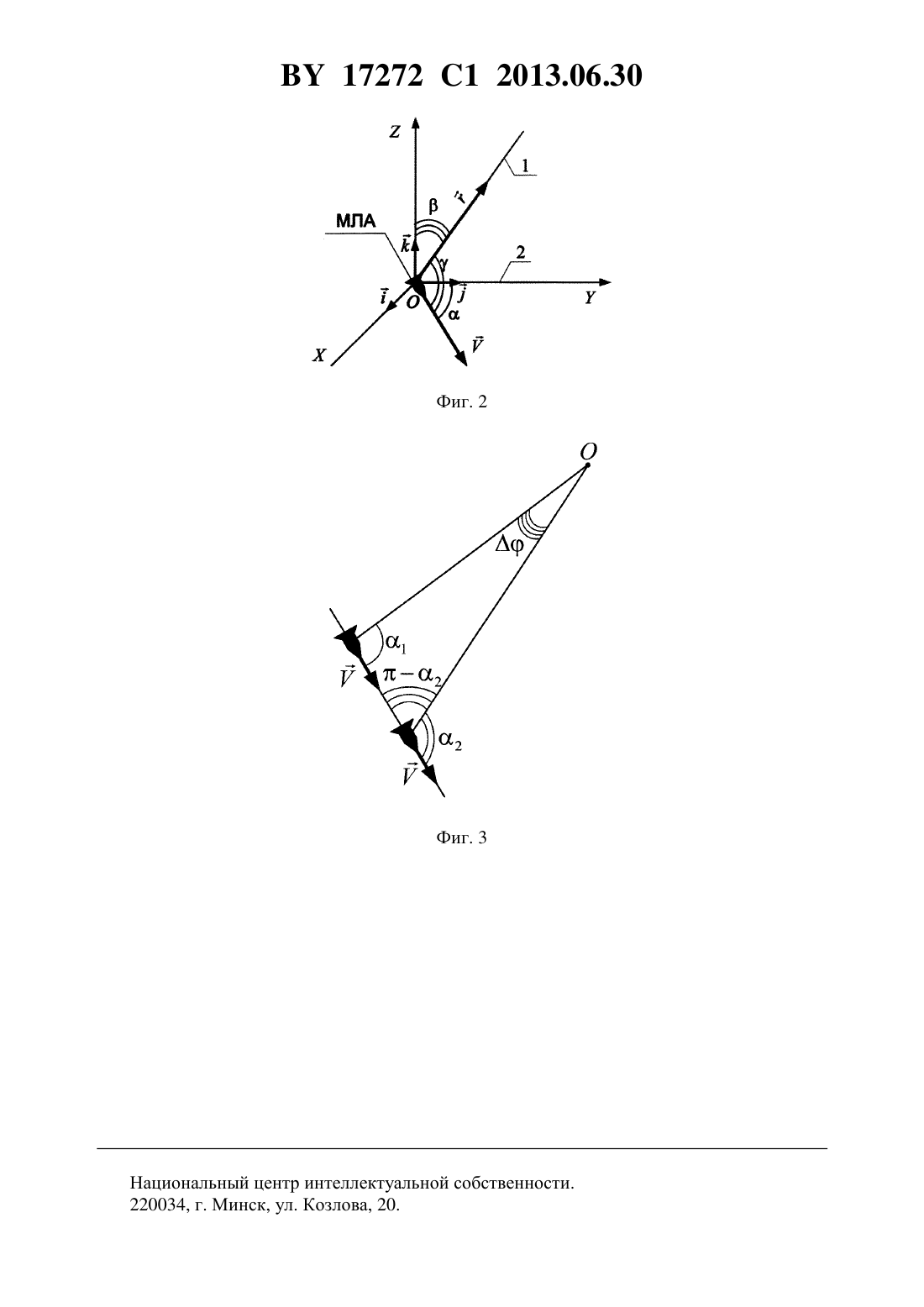
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА МАЛОВЫСОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА,ДВИЖУЩЕГОСЯ ЗА ГОРИЗОНТОМ ЗЕМЛИ(71) Заявитель Учреждение образования Военная академия Республики Беларусь(72) Авторы Воинов Валерий Васильевич Ивашко Владимир Михайлович Иващенко Инга Анатольевна Сасим Евгений Николаевич Липлянин Антон Юрьевич(73) Патентообладатель Учреждение образования Военная академия Республики Беларусь(57) Способ определения курсового угла маловысотного летательного аппарата, движущегося за горизонтом Земли, характеризующийся тем, что радиолокационной станцией одновременно излучают две электромагнитные волны с одинаковой частотой, одновременно линейно изменяющейся в диапазоне от 3 до 5 МГц, причем одну из волн излучают с возможностью отражения от ионосферы, а другую - с возможностью приземного распространения, принимают этой же радиолокационной станцией переизлученные маловысотным летательным аппаратом волны и осуществляют первое измерение частот 1 и 2 отраженной от ионосферы и приземной волн соответственно, мощность которых превысила установленное пороговое значение, при изменении азимута маловысотного летательного аппарата на величинуосуществляют второе измерение частот 1 и 2 отраженной от ионосферы и приземной волн соответственно, мощность которых превысила установленное пороговое значение, и определяют курсовой угол 1 маловысотного летательного аппарата для момента первого измерения упомянутых частот из выражения где 1 - угол между трассой распространения отраженной от ионосферы волны и зенитом в момент первого измерения упомянутых частот 2 - угол между трассой распространения отраженной от ионосферы волны и зенитом в момент второго измерения упомянутых частот. Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано для обнаружения маловысотных летательных аппаратов и определения параметров их движения за горизонтом Земли. Известен способ обнаружения крылатой ракеты 1, характеризующийся тем, что осуществляют прием фонового электромагнитного излучения в выбранном телесном угле в полосе частот собственного электромагнитного излучения крылатой ракеты от 2 до 5 МГц,мощность фонового излучения принимают в качестве порогового значения, усиливают электрический сигнал фонового излучения и преобразуют его в электромагнитное излучение в упомянутой полосе частот, которое направляют в телесный угол, из которого было принято упомянутое фоновое излучение, осуществляют прием вторичного электромагнитного излучения и измеряют его мощность, при превышении которой установленного порога принимают решение об обнаружении крылатой ракеты. Недостатком известного способа является ограниченность функциональных возможностей. С его помощью невозможно определить параметры движения маловысотного летательного аппарата, движущегося за горизонтом Земли. Наиболее близким по своей технической сущности к заявляемому способу является способ обнаружения маловысотного летательного аппарата 2, характеризующийся тем,что в точке приема излучают электромагнитную волну, периодически линейно изменяют частоту излучаемой волны в диапазоне от 3 до 5 МГц, об обнаружении маловысотного летательного аппарата судят по превышению мощностью принятой волны порогового значения. Недостатком этого способа является ограниченность функциональных возможностей. С его помощью невозможно определить параметры движения маловысотного летательного аппарата, движущегося за горизонтом Земли, в частности его курсовой угол. Задачей изобретения является расширение функциональных возможностей способа. Техническим результатом осуществления способа является определение курсового угла маловысотного летательного аппарата, движущегося за горизонтом Земли. Для решения поставленной задачи при осуществлении способа определения курсового угла маловысотного летательного аппарата, движущегося за горизонтом Земли, радиолокационной станцией одновременно излучают две электромагнитные волны с одинаковой частотой, одновременно линейно изменяющейся в диапазоне от 3 до 5 МГц, причем одну из волн излучают с возможностью отражения от ионосферы, а другую - с возможностью приземного распространения, принимают этой же радиолокационной станцией переизлученные маловысотным летательным аппаратом волны и осуществляют первое измерение частот 1 и 2 отраженной от ионосферы и приземной волн соответственно, мощность которых превысила установленное пороговое значение, при изменении азимута маловысотного летательного аппарата на величинуосуществляют второе измерение частот 1 и 2 отраженной от ионосферы и приземной волн соответственно, мощность которых превысила установленное пороговое значение, и определяют курсовой угол 1 маловысотного летательного аппарата для момента первого измерения упомянутых частот из выражения 2 где 1 - угол между трассой распространения отраженной от ионосферы волны и зенитом в момент первого измерения упомянутых частот 2 - угол между трассой распространения отраженной от ионосферы волны и зенитом в момент второго измерения упомянутых частот. Сущность способа поясняют фиг. 1-3. Обозначения на фиг. 1 следующие 1 - трасса распространения отраженных от ионосферы падающей и переизлученной электромагнитных волн 2 - трасса распространения падающей и переизлученной приземных электромагнитных волн 3 - радиолокационная станция 4 - вычислительное устройство 5 - индикатор На фиг. 2 обозначено 1, 2 - трассы распространения отраженной от ионосферы и приземной волн соответственно, ,- оси координат, ,- направляющие орты осей , ,соответственно- вектор скорости маловысотного летательного аппарата- произвольный вектор, направленный вдоль трассы 1- курсовой угол - угол между трассой распространения приземной волны и вектором скорости- угол между трассой распространения отраженной от ионосферы волны и зенитом- угол между трассой распространения отраженной от ионосферы волны и вектором скорости. Обозначения на фиг. 3 следующие- точка расположения радиолокационной станции- вектор скорости маловысотного летательного аппарата 1, 2 - курсовые углы маловысотного летательного аппарата в моменты первого и второго измерений соответственно- изменение азимута маловысотного летательного аппарата за промежуток времени, прошедший между первым и вторым измерениями. Сущность способа заключается в следующем. Маловысотный летательный аппарат МЛА (фиг. 1), взаимодействуя с поверхностью Земли, образует эквивалентный колебательный контур 3, который переизлучает падающие на него электромагнитные волны в полосе частот колебательного контура от 3 до 5 МГц. Волны указанного диапазона имеют два режима распространения 4 с отражением от ионосферы и приземный. Обе волны, трассы распространения которых 1 и 2 показаны на фиг. 1, излучают радиолокационной станцией 3. Частоты обеих волн одновременно линейно изменяют в диапазоне от 3 до 5 МГц. Необходимость излучения двух волн обусловлена априорной неизвестностью резонансной частоты эквивалентного колебательного контура маловысотного летательного аппарата и его скорости. При излучении радиолокационной станцией 3 (фиг. 1) электромагнитной волны частотой 0 из-за наличия эффекта Доплера радиолокационной станцией принимают распространяющуюся вдоль трассы 1 волну частотой где- модуль вектора скорости маловысотного летательного аппарата- скорость электромагнитных волн в вакууме- угол между трассой распространения отраженной от ионосферы волны и вектором скоростималовысотного летательного аппарата (фиг. 2). Переизлучаемая вдоль трассы 2 приземная волна в момент приема имеет частоту где- курсовой угол - угол между трассой распространения приземной волны и вектором скорости. Радиолокационной станцией 3 усиливают обе принимаемые волны, преобразуют их в электрический сигнал и передают на вычислительное устройство 4, которым определяют резонансные частоты 1 и 2 электромагнитных волн, мощность которых превысила пороговое значение. Выберем систему координаттаким образом, что ее начало совмещено с маловысотным летательным аппаратом (фиг. 2), осьнаправлена вдоль направления распространения приземной волны - вдоль трассы 2, трасса 1 распространения волны,отраженной от ионосферы, расположена в плоскости . Определим угол , для чего представим вектор скорости в виде(3),где ,- проекции вектора скорости на оси координатисоответственно,,направляющие орты осейисоответственно. Учтем, что Выберем произвольный векторнаправленный вдоль трассы 1. Очевидно, что(7). Здесь- угол между трассой распространения отраженной от ионосферы волны 1 и зенитом - осью- направляющий орт оси .Используя скалярное произведение векторови, определим где ,- модули векторовисоответственно. Раскрывая скалярное произведение в числителе (8) с помощью выражений (6) и (7),получим(9). Таким образом, выражение для частоты принимаемой волны, распространяющейся вдоль трассы 1, можно представить в виде Уголвсегда известен по углу наклона к зениту оси диаграммы направленности антенны, излучающей волну по трассе 1. Введем обозначение Рассмотрим два измерения величины , считая, что маловысотный летательный аппарат движется равномерно и прямолинейно. В начальный момент времени 21 1 и через промежуток времени, за который азимут маловысотного летательного аппарата изменяется на(фиг. 3) Здесь 1, 2 - курсовые углы маловысотного летательного аппарата в моменты первого и второго измерений соответственно. Считаем, что за время изменения азимута маловысотного летательного аппарата намодуль и направление вектора скорости не изменяются. Из фиг. 3 видно, что 12,(18) или 21.(20) Поделив обе части уравнения (20) на 20 , получим 11 1.(22) означает, что 12, и не требует никаких вычислений, так как курсовой угол маловысотного летательного аппарата в этом случае равен /2. Из (16) и (17) следует, что 11 1 где 1, 2 - частоты принимаемых волн, мощность которых превышает пороговое значение,распространяющихся соответственно по трассам 1 и 2, в первом измерении 1 ,2 - во втором измерении. Подстановка (28) и (29) в (27) приводит к следующему выражению( 21 )(122 )На вычислительное устройство 4 поступают данные о величинах 1, 2, . После проведения второго измерения вычислительным устройством рассчитывают Величина курсового угла 1 индицируется индикатором 5. Таким образом, за счет одновременного излучения двух волн, измерения их частот при приеме в точке излучения и повторения измерений после изменения курсового угла на , можно определить курсовой угол в обоих измерениях по формулам (31) и (10), что расширяет технические возможности способа-прототипа. Источники информации 1. Патент 13748, МПК 01 13/00, 2010. 2. Патент 13148, МПК 01 13/00,08 13/24, 2010. 3. Воинов В.В. и др. Электродинамическая модель маловысотного летательного аппарата // Сб. науч. ст. Военной академии РБ. - 2008. -15. - С. 62-66. 4. Шабельников А.В. Распространение радиоволн. Физический энциклопедический словарь. - М. Сов. энцикл., 1965. - Т. 4. - С. 336-340. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01S 13/72
Метки: угла, маловысотного, земли, аппарата, летательного, определения, способ, курсового, горизонтом, движущегося
Код ссылки
<a href="https://by.patents.su/7-17272-sposob-opredeleniya-kursovogo-ugla-malovysotnogo-letatelnogo-apparata-dvizhushhegosya-za-gorizontom-zemli.html" rel="bookmark" title="База патентов Беларуси">Способ определения курсового угла маловысотного летательного аппарата, движущегося за горизонтом Земли</a>
Способ определения радиальной скорости маловысотного летательного аппарата, движущегося за горизонтом Земли

Номер патента: 17288
Опубликовано: 30.06.2013
Авторы: Воинов Валерий Васильевич, Сасим Евгений Николаевич, Ивашко Владимир Михайлович, Липлянин Антон Юрьевич, Иващенко Инга Анатольевна
МПК: G01S 13/58
Метки: способ, земли, аппарата, движущегося, определения, маловысотного, летательного, скорости, горизонтом, радиальной
Текст:
...волны, излученной радиолокационной станцией 1 - трасса распространения отраженных от ионосферы волн 2 - трасса волн приземного распространения 3 - радиолокационная станция,4 - вычислительное устройство,5 - индикатор. На фиг. 2 обозначено 1, 2 - трассы распространения отраженной от ионосферы и приземной волн соответственно, ,- оси координат,,- направляющие орты осей , ,соответственно- вектор скорости маловысотного летательного...
Способ определения горизонтальной дальности маловысотного летательного аппарата, движущегося за горизонтом земли
Номер патента: 14500
Опубликовано: 30.06.2011
Авторы: Марковникова Наталья Владимировна, Воинов Валерий Васильевич, Мокринский Владимир Валерьевич, Подкопаев Петр Алексеевич
МПК: G01S 13/72
Метки: способ, маловысотного, определения, дальности, движущегося, горизонтальной, летательного, аппарата, земли, горизонтом
Текст:
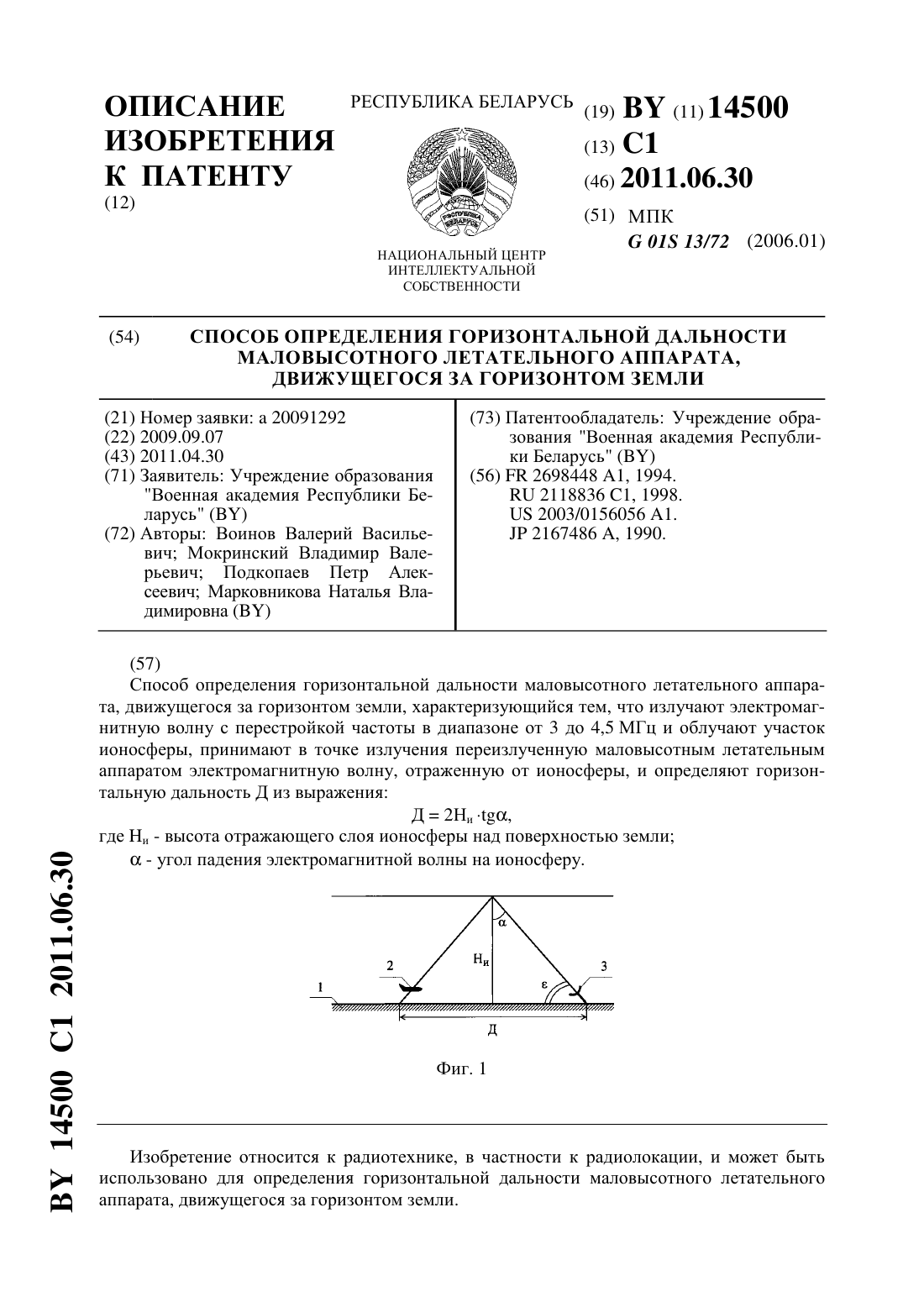
...изобретения является расширение технических возможностей способа. Техническим результатом осуществления способа является определение дальности маловысотного летательного аппарата за горизонтом земли. Для решения поставленной задачи при осуществлении способа излучают электромагнитную волну с перестройкой частоты в диапазоне от 3 до 4,5 МГц и облучают участок ионосферы, принимают в точке излучения переизлученную маловысотным летательным...
Способ определения курсового угла маловысотного летательного аппарата
Номер патента: 13750
Опубликовано: 30.10.2010
Авторы: Воинов Валерий Васильевич, Мокринский Владимир Валерьевич
МПК: G01S 13/00
Метки: угла, способ, курсового, летательного, маловысотного, аппарата, определения
Текст:
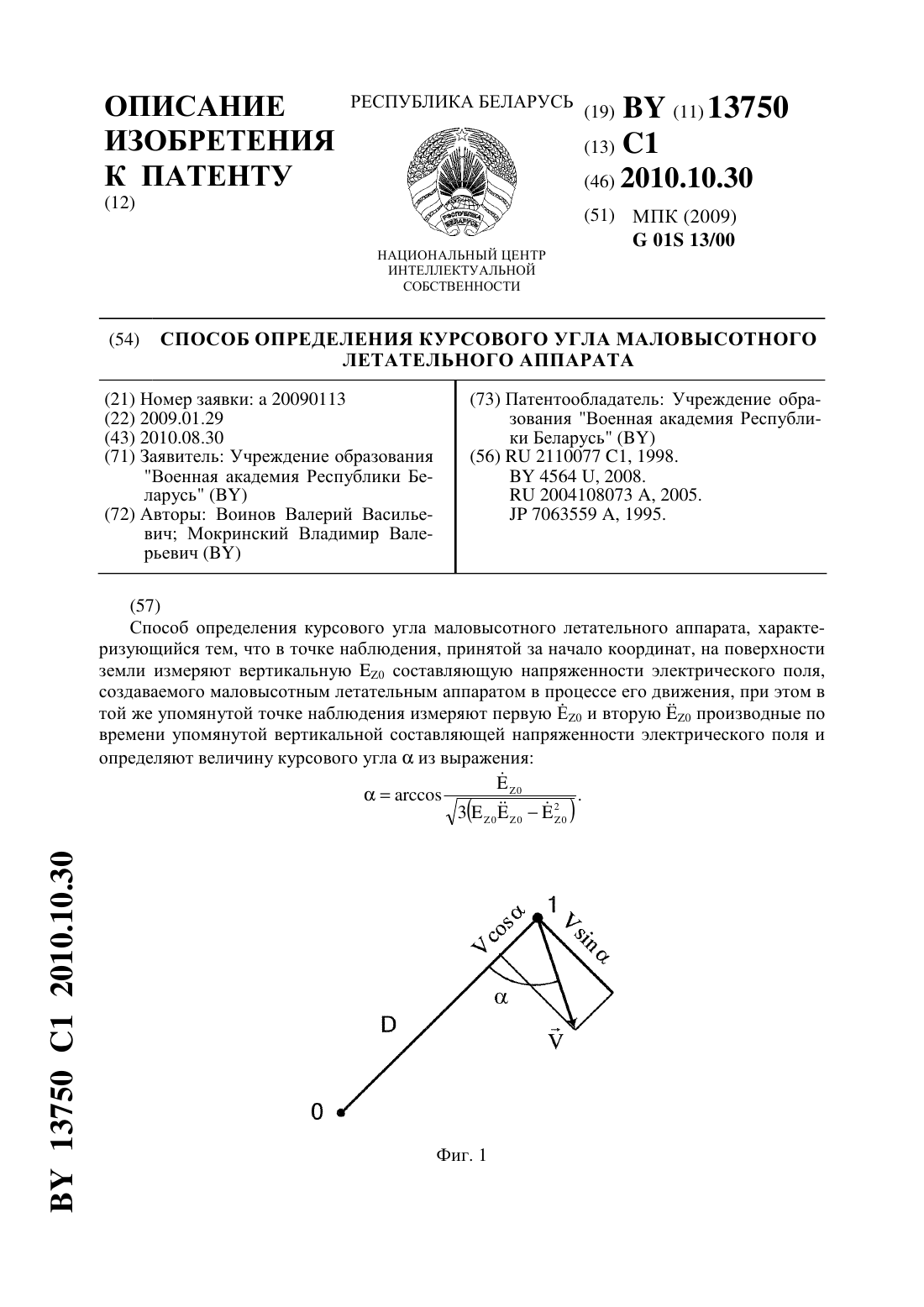
...и определяют величину курсового углаиз выражения На фиг. 1 показано взаимное расположение маловысотного летательного аппарата и точки измерения в горизонтальной плоскости. Обозначения на фиг. 1 следующие 0 - точка измерения 1 - маловысотный летательный аппарат- горизонтальная дальность маловысотного летательного аппарата- курсовой угол маловысотного летательного аппарата- вектор скорости маловысотного летательного аппарата- радиальная...
Способ определения дальности до маловысотного летательного аппарата
Номер патента: 16878
Опубликовано: 28.02.2013
Авторы: Сасим Евгений Николаевич, Иващенко Инга Анатольевна, Воинов Валерий Васильевич
МПК: G01S 13/08
Метки: способ, маловысотного, дальности, летательного, аппарата, определения
Текст:
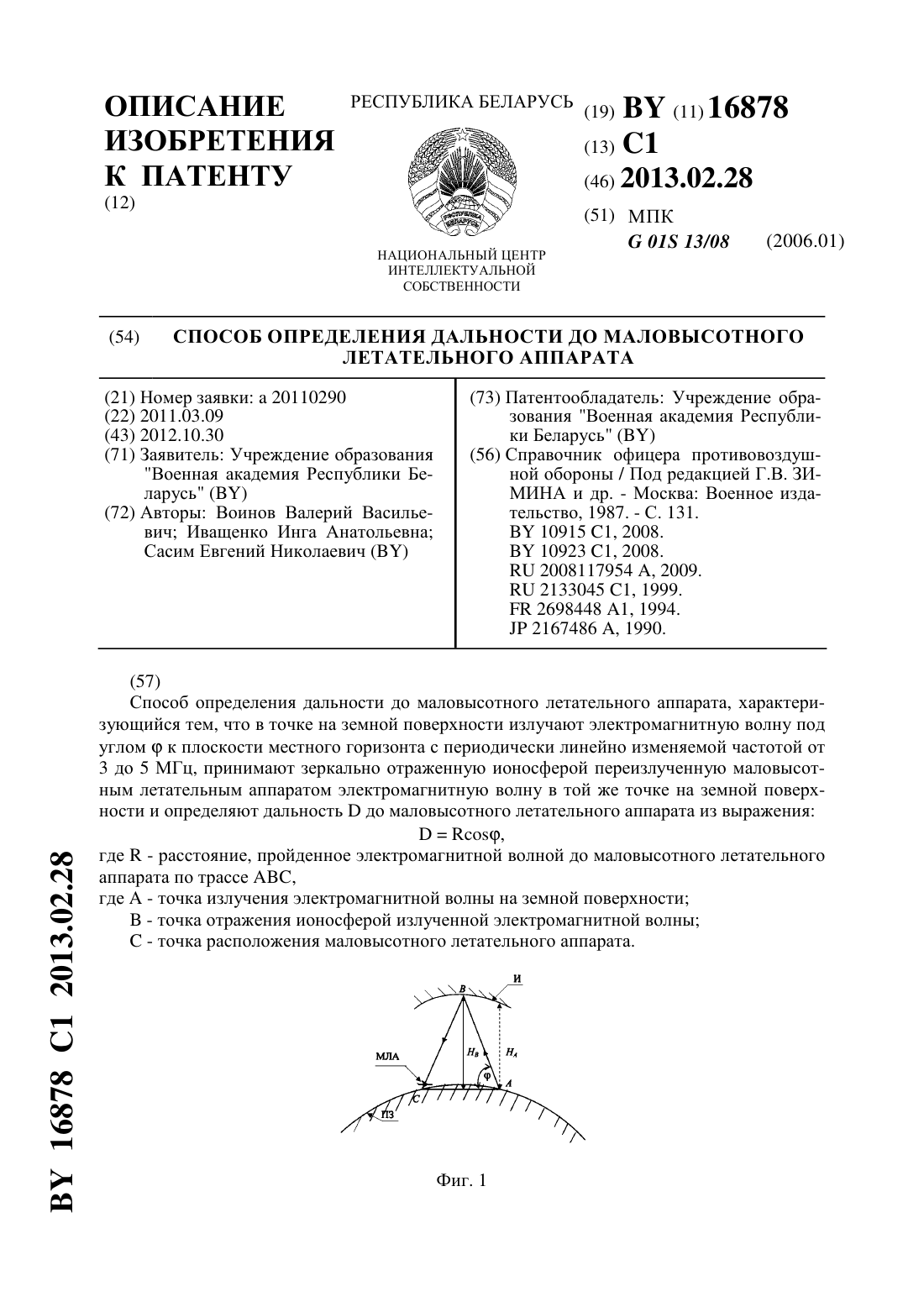
...волны- точка расположения маловысотного летательного аппарата- угол наклона оси диаграммы направленности приемо-передающей антенны к плоскости местного горизонта,- высота ионосферы в точках отраженияи излученияэлектромагнитной волны соответственно. На фиг. 2 приведена схема, реализующая заявляемый способ. Обозначения на фиг. 2 следующие 1 - приемо-передающая станция, например, типа станции зондирования атмосферы 4 3 2 16878 1...
Способ определения дальности до маловысотного летательного аппарата
Номер патента: 16108
Опубликовано: 30.08.2012
Авторы: Иващенко Инга Анатольевна, Воинов Валерий Васильевич, Сасим Евгений Николаевич
МПК: G01S 13/00
Метки: летательного, дальности, аппарата, определения, маловысотного, способ
Текст:
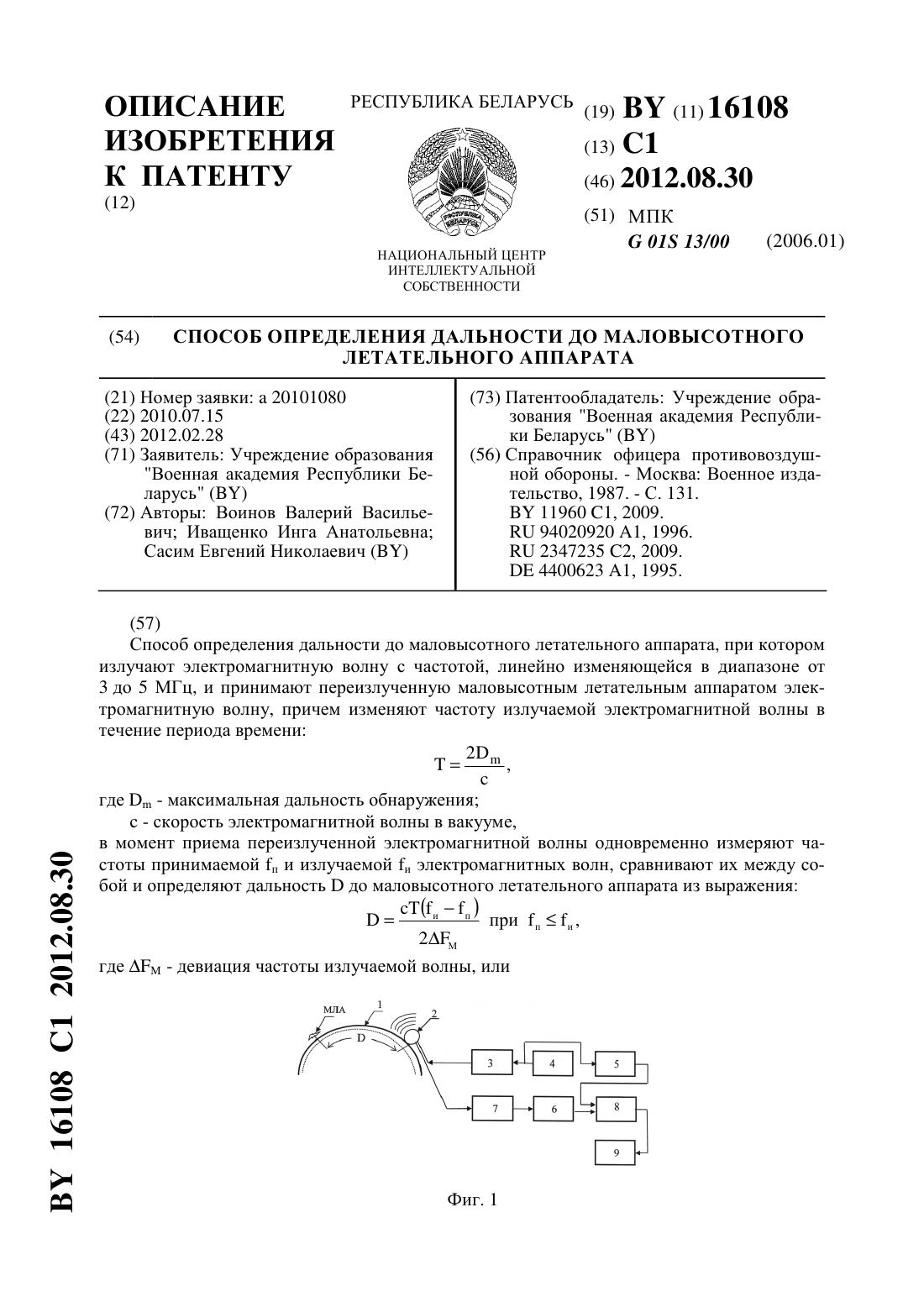
...волны в момент приема переизлученной маловысотным летательным аппаратом электромагнитной волны 1 - временной интервал между излучением принимаемой электромагнитной волны частотой п и ее приемом при пи. На фиг. 3 обозначено 2 - временной интервал между излучением принимаемой электромагнитной волны частотой п и ее приемом при пи. 21 - временной интервал между излучением электромагнитных волн с частотами п и 2 22 - временной интервал между...
Предыдущий патент: Способ определения радиальной скорости маловысотного летательного аппарата, движущегося за горизонтом Земли
Следующий патент: Раскислитель казеиновой кислотной сыворотки
Случайный патент: Вертикальный механический пресс