Способ определения дальности до маловысотного летательного аппарата
Номер патента: 16878
Опубликовано: 28.02.2013
Авторы: Иващенко Инга Анатольевна, Сасим Евгений Николаевич, Воинов Валерий Васильевич
Текст
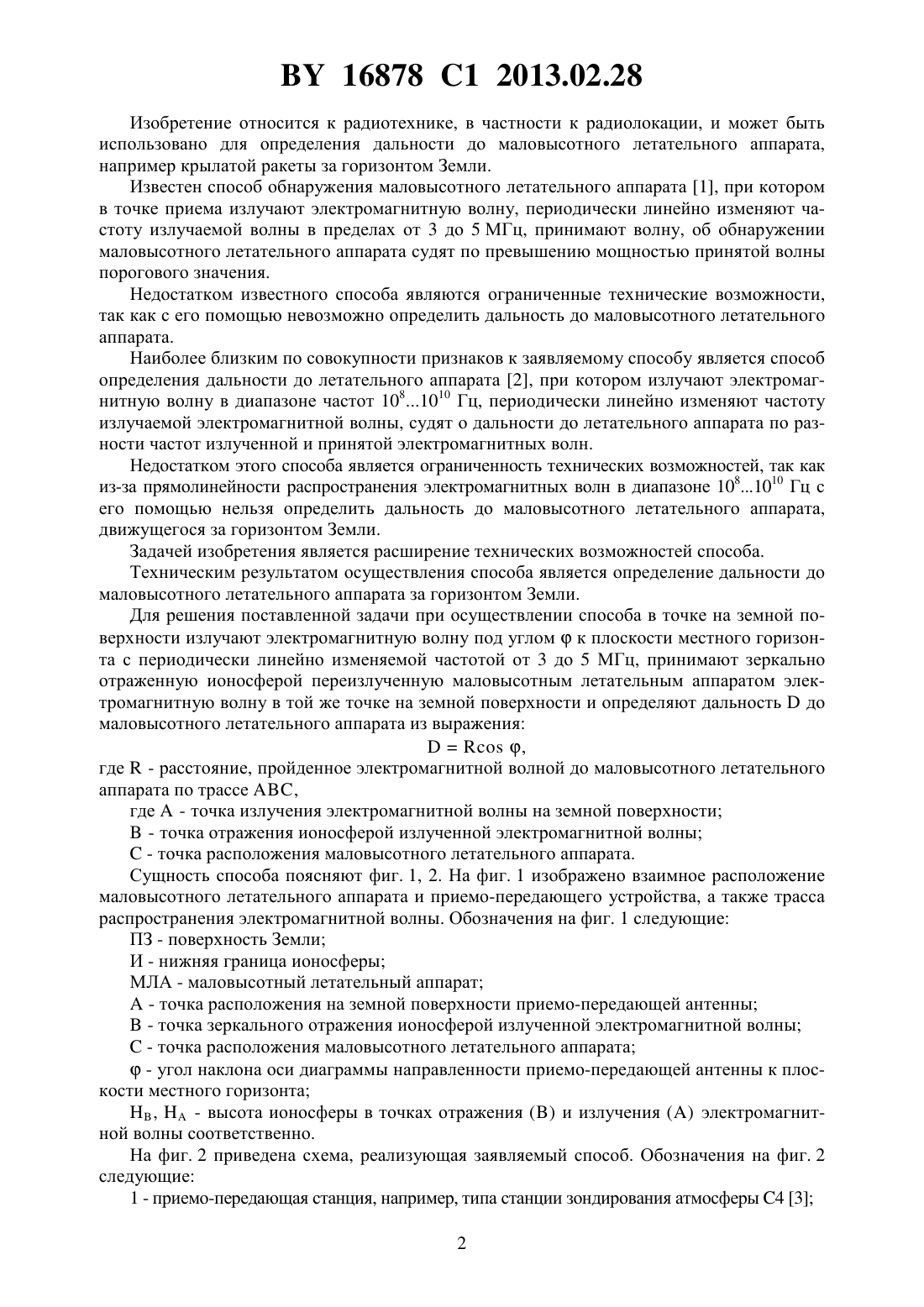
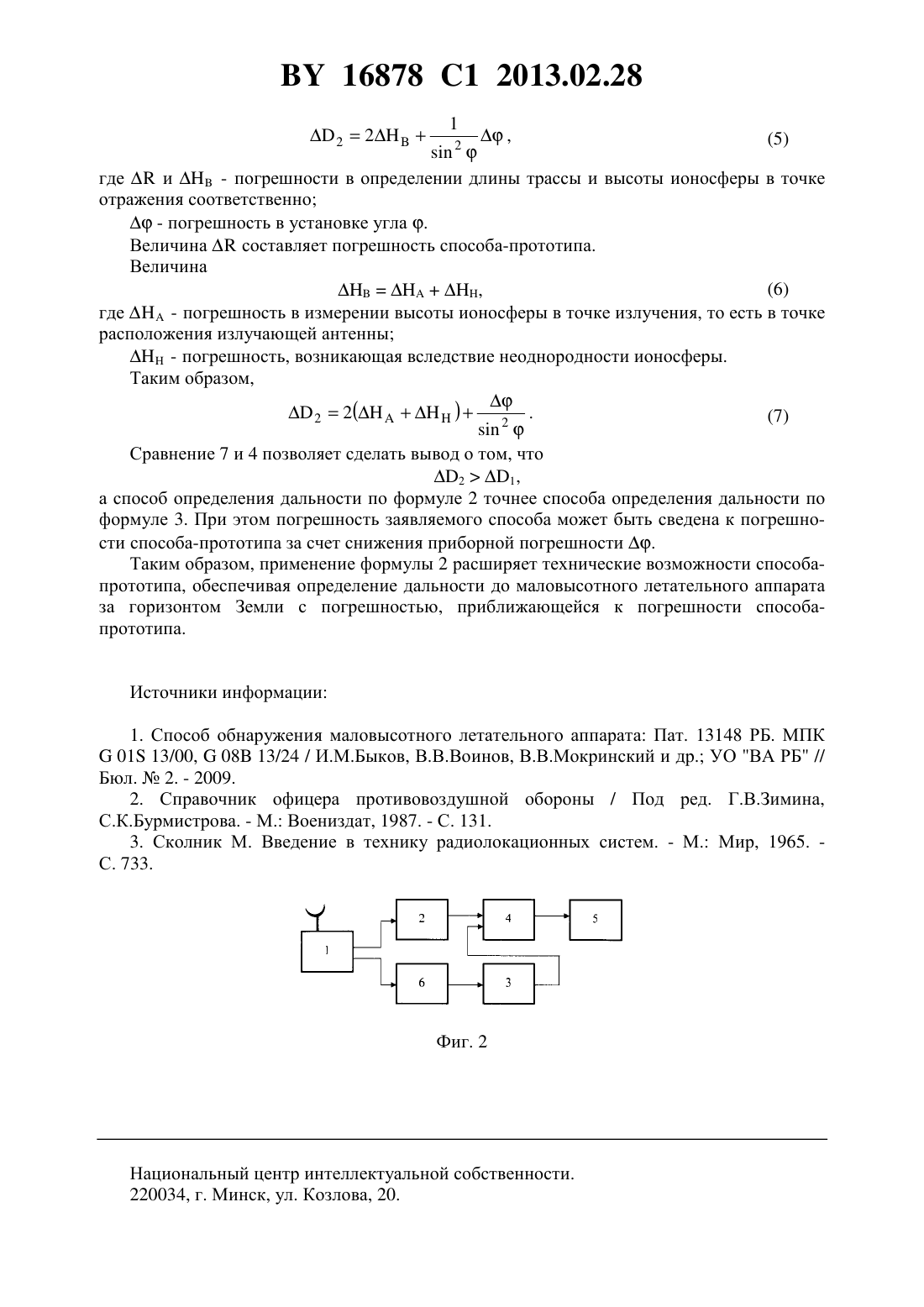
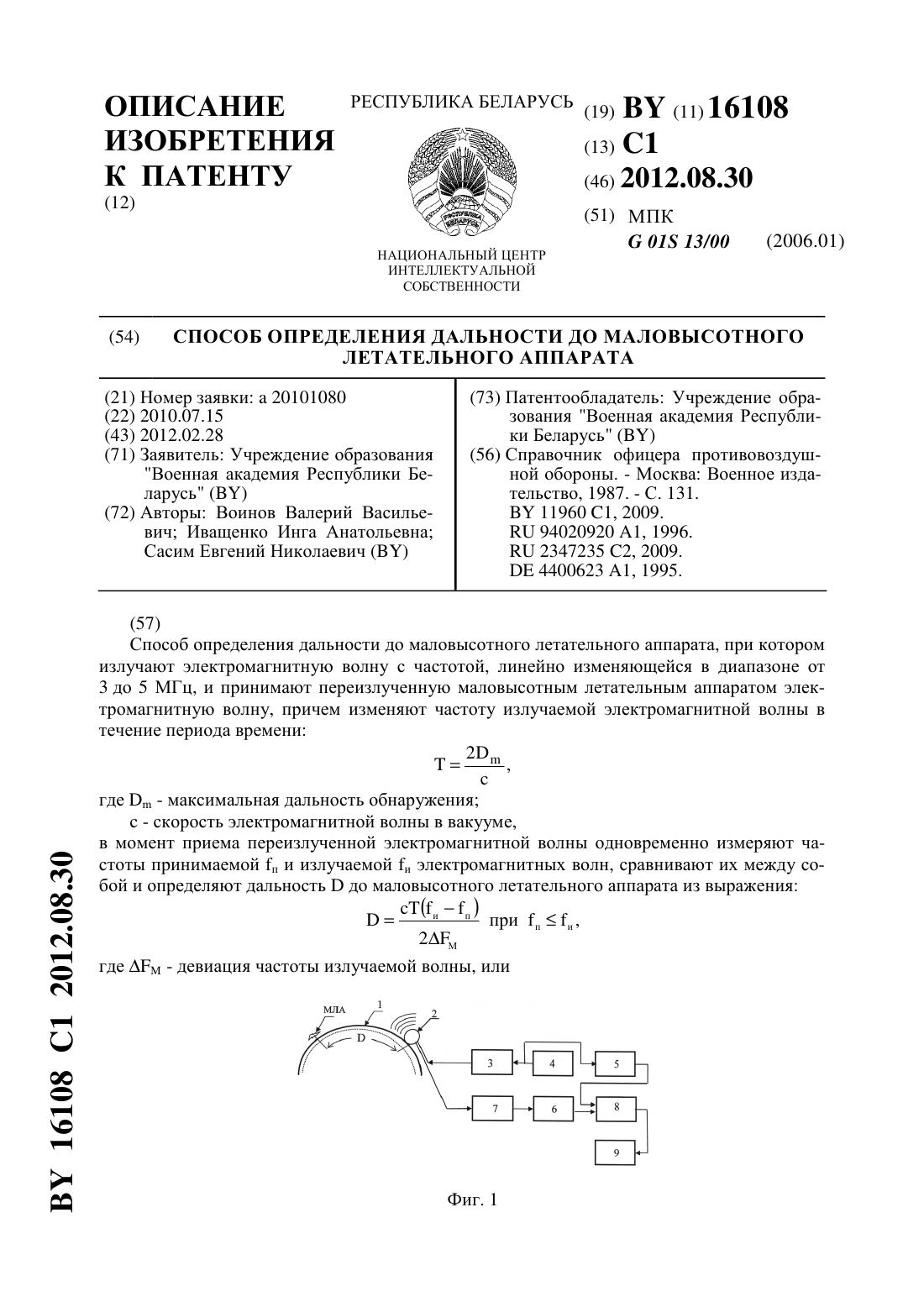
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО МАЛОВЫСОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА(71) Заявитель Учреждение образования Военная академия Республики Беларусь(72) Авторы Воинов Валерий Васильевич Иващенко Инга Анатольевна Сасим Евгений Николаевич(73) Патентообладатель Учреждение образования Военная академия Республики Беларусь(56) Справочник офицера противовоздушной обороны / Под редакцией Г.В. ЗИМИНА и др. - Москва Военное издательство, 1987. - С. 131.10915 1, 2008.10923 1, 2008.2008117954 , 2009.2133045 1, 1999.2698448 1, 1994.2167486 , 1990.(57) Способ определения дальности до маловысотного летательного аппарата, характеризующийся тем, что в точке на земной поверхности излучают электромагнитную волну под угломк плоскости местного горизонта с периодически линейно изменяемой частотой от 3 до 5 МГц, принимают зеркально отраженную ионосферой переизлученную маловысотным летательным аппаратом электромагнитную волну в той же точке на земной поверхности и определяют дальностьдо маловысотного летательного аппарата из выражения,где- расстояние, пройденное электромагнитной волной до маловысотного летательного аппарата по трассе ,где- точка излучения электромагнитной волны на земной поверхности- точка отражения ионосферой излученной электромагнитной волны- точка расположения маловысотного летательного аппарата. 16878 1 2013.02.28 Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано для определения дальности до маловысотного летательного аппарата,например крылатой ракеты за горизонтом Земли. Известен способ обнаружения маловысотного летательного аппарата 1, при котором в точке приема излучают электромагнитную волну, периодически линейно изменяют частоту излучаемой волны в пределах от 3 до 5 МГц, принимают волну, об обнаружении маловысотного летательного аппарата судят по превышению мощностью принятой волны порогового значения. Недостатком известного способа являются ограниченные технические возможности,так как с его помощью невозможно определить дальность до маловысотного летательного аппарата. Наиболее близким по совокупности признаков к заявляемому способу является способ определения дальности до летательного аппарата 2, при котором излучают электромагнитную волну в диапазоне частот 1081010 Гц, периодически линейно изменяют частоту излучаемой электромагнитной волны, судят о дальности до летательного аппарата по разности частот излученной и принятой электромагнитных волн. Недостатком этого способа является ограниченность технических возможностей, так как из-за прямолинейности распространения электромагнитных волн в диапазоне 1081010 Гц с его помощью нельзя определить дальность до маловысотного летательного аппарата,движущегося за горизонтом Земли. Задачей изобретения является расширение технических возможностей способа. Техническим результатом осуществления способа является определение дальности до маловысотного летательного аппарата за горизонтом Земли. Для решения поставленной задачи при осуществлении способа в точке на земной поверхности излучают электромагнитную волну под угломк плоскости местного горизонта с периодически линейно изменяемой частотой от 3 до 5 МГц, принимают зеркально отраженную ионосферой переизлученную маловысотным летательным аппаратом электромагнитную волну в той же точке на земной поверхности и определяют дальностьдо маловысотного летательного аппарата из выражения,где- расстояние, пройденное электромагнитной волной до маловысотного летательного аппарата по трассе ,где- точка излучения электромагнитной волны на земной поверхности- точка отражения ионосферой излученной электромагнитной волны- точка расположения маловысотного летательного аппарата. Сущность способа поясняют фиг. 1, 2. На фиг. 1 изображено взаимное расположение маловысотного летательного аппарата и приемо-передающего устройства, а также трасса распространения электромагнитной волны. Обозначения на фиг. 1 следующие ПЗ - поверхность Земли И - нижняя граница ионосферы МЛА - маловысотный летательный аппарат- точка расположения на земной поверхности приемо-передающей антенны- точка зеркального отражения ионосферой излученной электромагнитной волны- точка расположения маловысотного летательного аппарата- угол наклона оси диаграммы направленности приемо-передающей антенны к плоскости местного горизонта,- высота ионосферы в точках отраженияи излученияэлектромагнитной волны соответственно. На фиг. 2 приведена схема, реализующая заявляемый способ. Обозначения на фиг. 2 следующие 1 - приемо-передающая станция, например, типа станции зондирования атмосферы 4 3 2 16878 1 2013.02.28 2 , 3 - первый и второй соответственно частотомеры 4 - вычислительное устройство 5 - индикатор 6 - пороговое устройство. Способ реализуют следующим образом. В точкена земной поверхности (фиг. 1) располагается приемо-передающая антенна, которая излучает электромагнитную волну под угломк плоскости местного горизонта. Пренебрегая кривизной Земли, считаем, что плоскости местного горизонта в точкахисовпадают со сторонойтреугольника. Электромагнитная волна, зеркально отражаясь от ионосферы в точке , приходит в точку , над которой движется маловысотный летательный аппарат. Пренебрегая высотой подъема антенны и высотой полета маловысотного летательного аппарата, полагаем, что они располагаются на поверхности Земли (ПЗ). Система маловысотный летательный аппарат - поверхность Земли переизлучает попадающую на нее электромагнитную волну 1. Переизлученная волна, проходя путь в направлении, противоположном падающей волне, попадает на приемо-передающую антенну . Поскольку частота электромагнитных колебаний в системе маловысотный летательный аппарат - поверхность Земли заранее точно неизвестна, приемо-передающая станция 1 (фиг. 2) подает на антеннусигнал с линейно изменяющейся частотой в пределах от 3 до 5 МГц. С первого выхода приемо-передающей станции 1 сигнал излучаемой частоты поступает на первый частотомер 2, который измеряет частоту излучаемой электромагнитной волны. Со второго выхода приемо-передающей станции 1 сигнал, создаваемый принимаемой электромагнитной волной, поступает на пороговое устройство 6. При превышении мощностью сигнала порогового значения он с выхода порогового устройства 6 поступает на частотомер 3, который измеряет частоту принимаемой электромагнитной волны. С выходов частотомеров 2 и 3 сигналы поступают на входы вычислительного устройства 4. Распространение электромагнитных волн по трассе(фиг. 1) происходит в свободном пространстве. Поэтому для определения длины трассы , которую обозначим, можно воспользоваться соотношением 2и п м,(1) 4 м где- скорость электромагнитных волн в вакууме и, п - частоты излучаемой и одновременно принимаемой электромагнитных волн соответственном - период повторения модулирующей частоты передатчика м - девиация частоты излучаемых электромагнитных волн. Превышение принимаемым сигналом порога, установленного в пороговом устройстве 6, происходит только в момент обнаружения маловысотного летательного аппарата, то есть при определенном значении угла . В треугольникесторонаявляется дальностью до маловысотного летательного аппарата, которую обозначим . Связь дальности до маловысотного летательного аппаратаи длины трассы , как это следует из фиг. 1, определяется выражением(2). Сравним погрешность в определении дальности заявляемым методом и методом, основанным на использовании соотношения,(5)2 гдеи- погрешности в определении длины трассы и высоты ионосферы в точке отражения соответственно- погрешность в установке угла . Величинасоставляет погрешность способа-прототипа. Величина(6),где- погрешность в измерении высоты ионосферы в точке излучения, то есть в точке расположения излучающей антенны- погрешность, возникающая вследствие неоднородности ионосферы. Таким образом,22(7)2 Сравнение 7 и 4 позволяет сделать вывод о том, что 21,а способ определения дальности по формуле 2 точнее способа определения дальности по формуле 3. При этом погрешность заявляемого способа может быть сведена к погрешности способа-прототипа за счет снижения приборной погрешности . Таким образом, применение формулы 2 расширяет технические возможности способапрототипа, обеспечивая определение дальности до маловысотного летательного аппарата за горизонтом Земли с погрешностью, приближающейся к погрешности способапрототипа. Источники информации 1. Способ обнаружения маловысотного летательного аппарата Пат. 13148 РБ. МПК 01 13/00,08 13/24 / И.М.Быков, В.В.Воинов, В.В.Мокринский и др. УО ВА РБ // Бюл.2. - 2009. 2. Справочник офицера противовоздушной обороны / Под ред. Г.В.Зимина,С.К.Бурмистрова. - М. Воениздат, 1987. - С. 131. 3. Сколник М. Введение в технику радиолокационных систем. - М. Мир, 1965. С. 733. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01S 13/08
Метки: летательного, способ, аппарата, определения, дальности, маловысотного
Код ссылки
<a href="https://by.patents.su/4-16878-sposob-opredeleniya-dalnosti-do-malovysotnogo-letatelnogo-apparata.html" rel="bookmark" title="База патентов Беларуси">Способ определения дальности до маловысотного летательного аппарата</a>
Способ определения дальности до маловысотного летательного аппарата
Номер патента: 16108
Опубликовано: 30.08.2012
Авторы: Воинов Валерий Васильевич, Иващенко Инга Анатольевна, Сасим Евгений Николаевич
МПК: G01S 13/00
Метки: летательного, аппарата, способ, дальности, определения, маловысотного
Текст:
...волны в момент приема переизлученной маловысотным летательным аппаратом электромагнитной волны 1 - временной интервал между излучением принимаемой электромагнитной волны частотой п и ее приемом при пи. На фиг. 3 обозначено 2 - временной интервал между излучением принимаемой электромагнитной волны частотой п и ее приемом при пи. 21 - временной интервал между излучением электромагнитных волн с частотами п и 2 22 - временной интервал между...
Способ определения горизонтальной дальности маловысотного летательного аппарата, движущегося за горизонтом земли
Номер патента: 14500
Опубликовано: 30.06.2011
Авторы: Подкопаев Петр Алексеевич, Мокринский Владимир Валерьевич, Марковникова Наталья Владимировна, Воинов Валерий Васильевич
МПК: G01S 13/72
Метки: земли, движущегося, аппарата, дальности, летательного, маловысотного, способ, горизонтом, определения, горизонтальной
Текст:
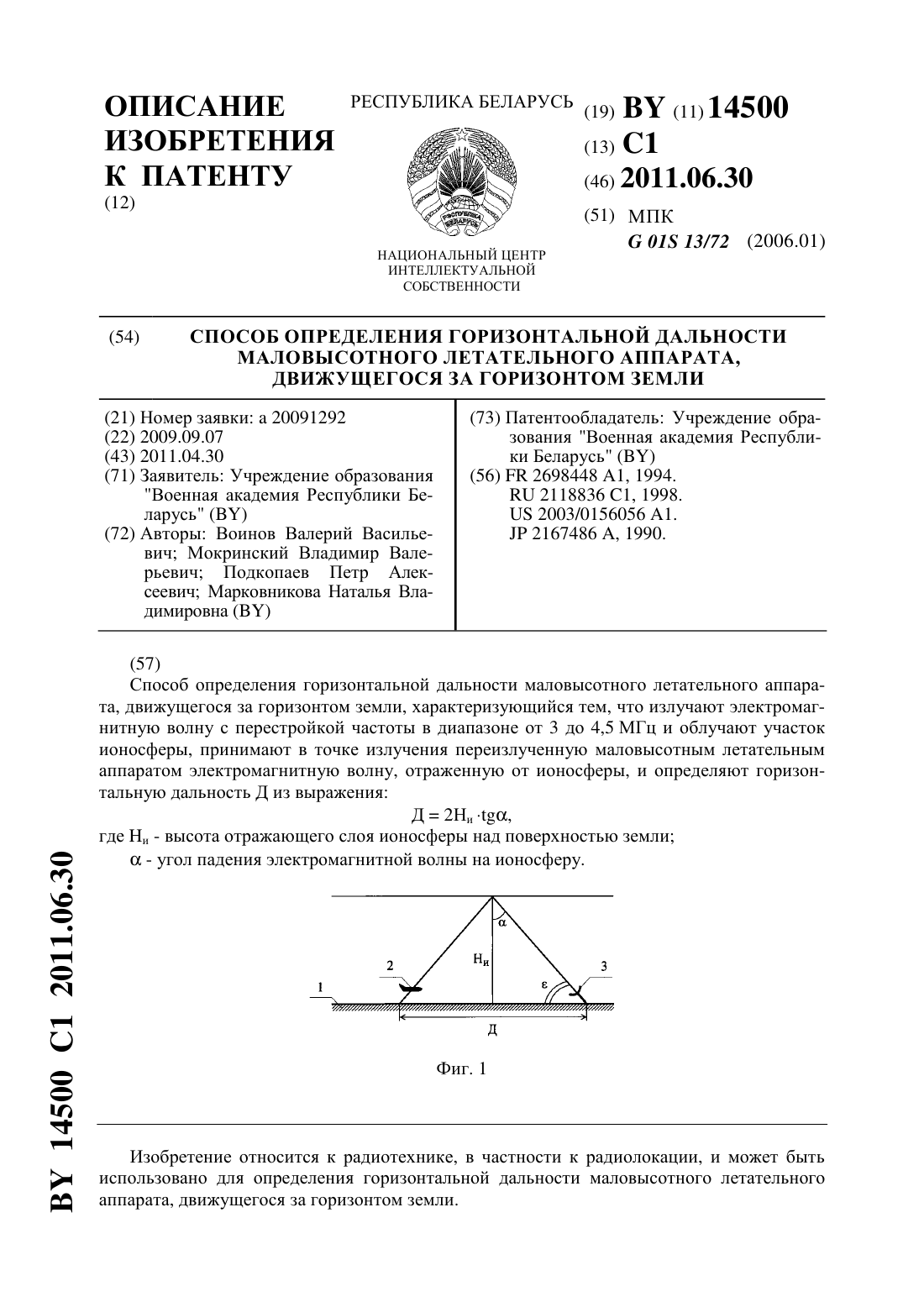
...изобретения является расширение технических возможностей способа. Техническим результатом осуществления способа является определение дальности маловысотного летательного аппарата за горизонтом земли. Для решения поставленной задачи при осуществлении способа излучают электромагнитную волну с перестройкой частоты в диапазоне от 3 до 4,5 МГц и облучают участок ионосферы, принимают в точке излучения переизлученную маловысотным летательным...
Способ определения горизонтальной дальности маловысотного летательного аппарата
Номер патента: 10923
Опубликовано: 30.08.2008
Авторы: Воинов Валерий Васильевич, Мокринский Владимир Валерьевич
МПК: G01S 11/00
Метки: способ, горизонтальной, аппарата, летательного, маловысотного, определения, дальности
Текст:
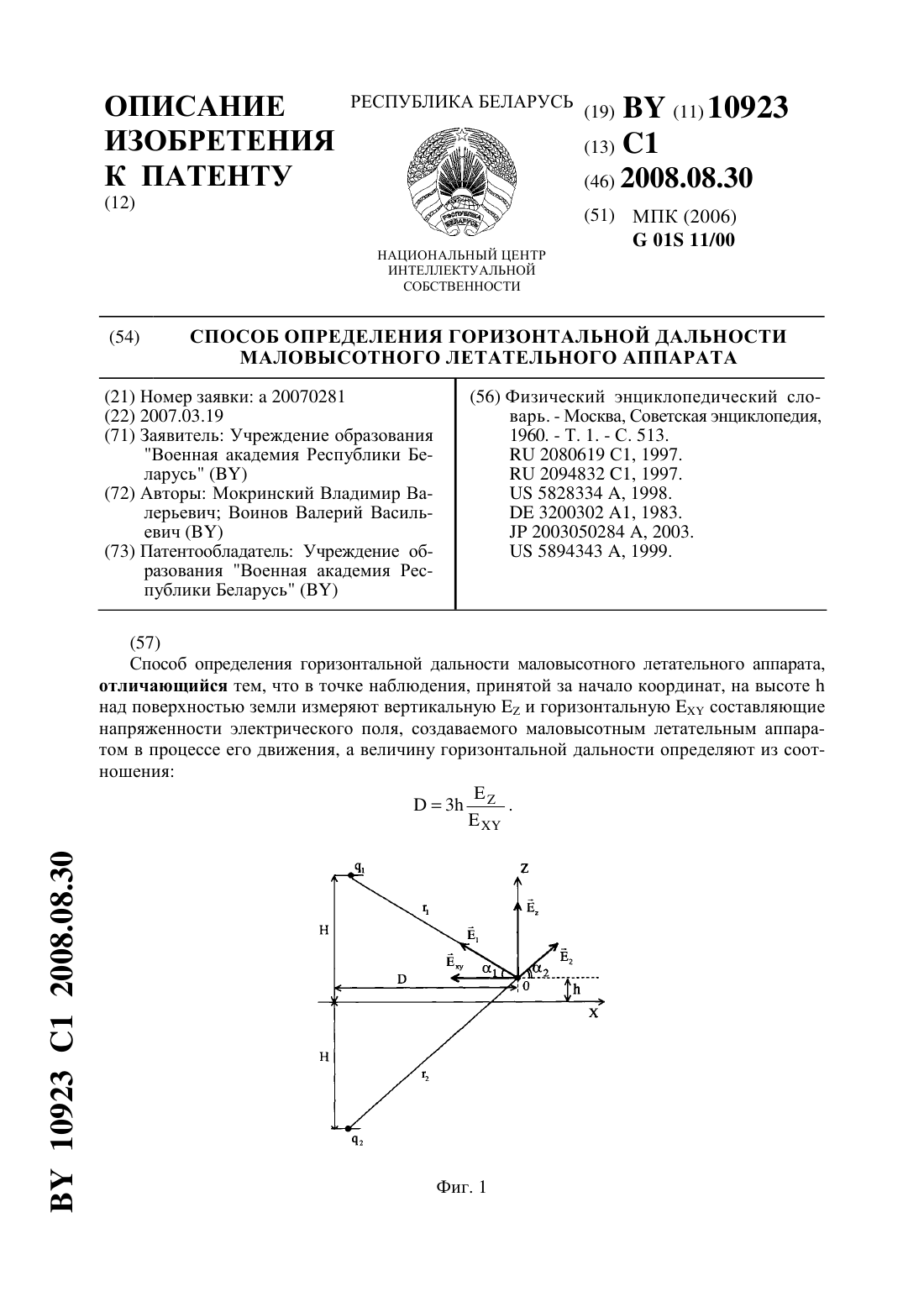
...фиг. 1 следующие 1 - заряд маловысотного летательного аппарата 2 - зеркальное изображение заряда 1 в проводящей поверхности Земли 2-1 Н - высота полета маловысотного летательного аппарата- горизонтальная дальность маловысотного летательного аппарата- высота точки измерения над поверхностью Земли 1, 2 - расстояния от точки измерения до заряда маловысотного летательного аппарата 1 и его зеркального изображения 2 соответственно 1 ,2 -...
Способ определения курсового угла маловысотного летательного аппарата
Номер патента: 13750
Опубликовано: 30.10.2010
Авторы: Воинов Валерий Васильевич, Мокринский Владимир Валерьевич
МПК: G01S 13/00
Метки: аппарата, маловысотного, угла, курсового, определения, летательного, способ
Текст:
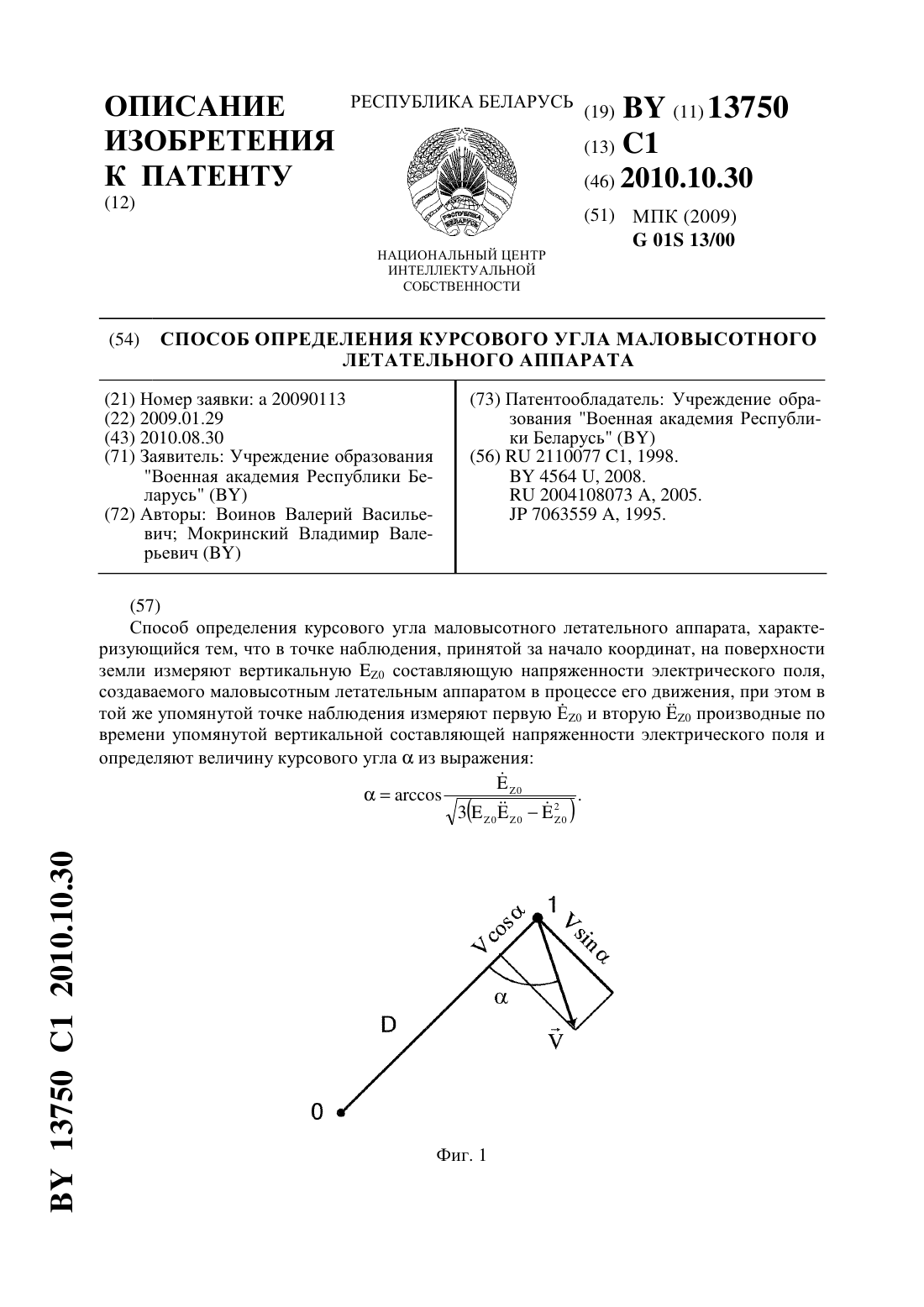
...и определяют величину курсового углаиз выражения На фиг. 1 показано взаимное расположение маловысотного летательного аппарата и точки измерения в горизонтальной плоскости. Обозначения на фиг. 1 следующие 0 - точка измерения 1 - маловысотный летательный аппарат- горизонтальная дальность маловысотного летательного аппарата- курсовой угол маловысотного летательного аппарата- вектор скорости маловысотного летательного аппарата- радиальная...
Способ определения высоты полета маловысотного летательного аппарата
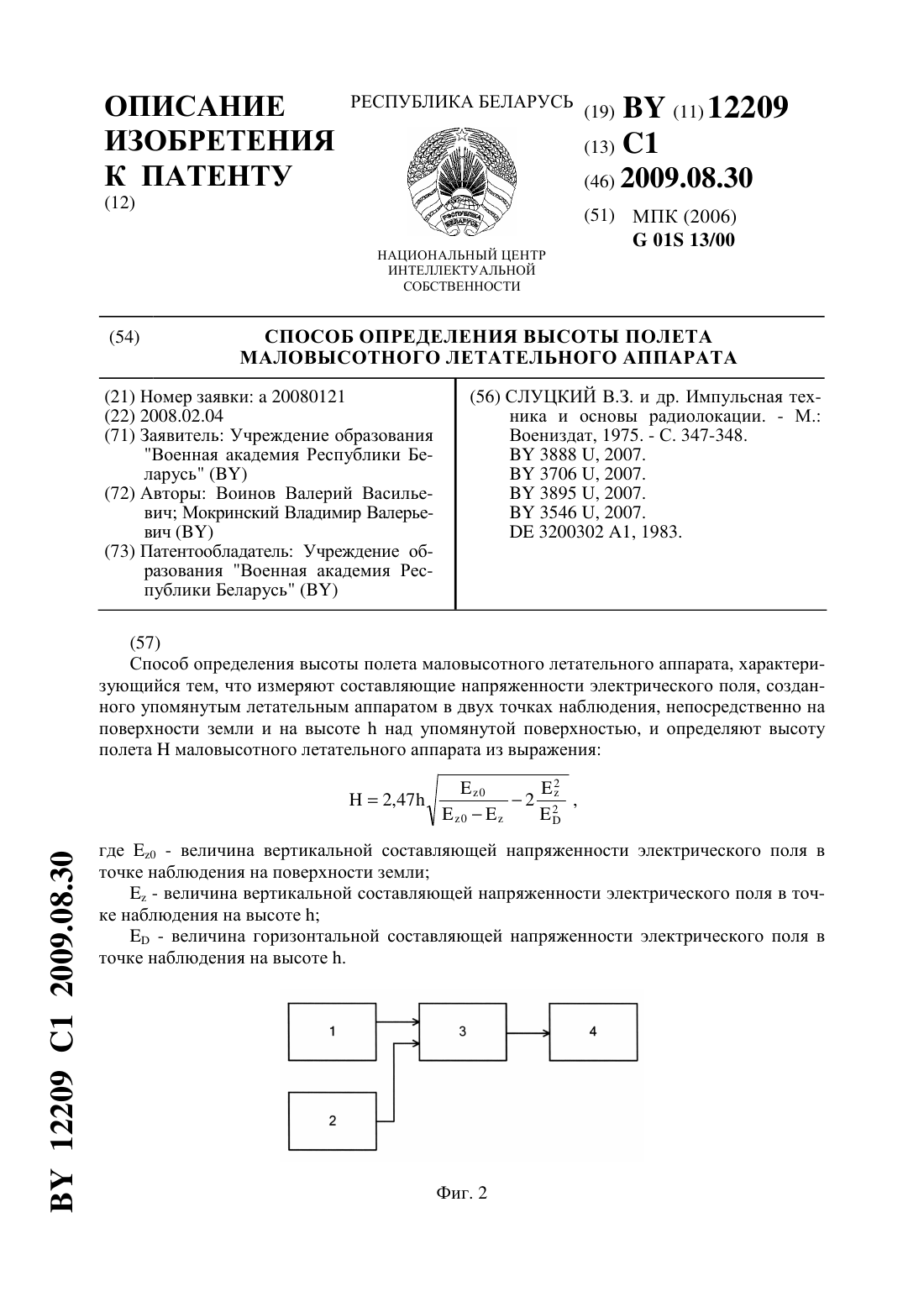
Номер патента: 12209
Опубликовано: 30.08.2009
Авторы: Мокринский Владимир Валерьевич, Воинов Валерий Васильевич
МПК: G01S 13/00
Метки: способ, полета, летательного, высоты, определения, маловысотного, аппарата
Текст:
...измерения до зарядов 1 и 2 соответственно- высота точки измерения над поверхностью земли 1,2 - напряженности электрического поля, создаваемые в точке наблюдения зарядами 1 и 2 соответственно- вертикальная ось прямоугольной системы координат с началом в точке наблюдения 2 12209 1 2009.08.30,- вертикальная и горизонтальная составляющие напряженности результирующего электрического поля в точке наблюдения соответственно 1 и 2 - углы между...
Предыдущий патент: Способ управления согласованностью блоков данных CHUNK в распределенной файловой системе и устройство для его осуществления
Следующий патент: Способ очистки поверхности изделия из ферромагнитного материала
Случайный патент: Строительный блок и стена здания или сооружения из таких блоков