Способ неразрушающего контроля твердости движущегося ферромагнитного изделия
Текст
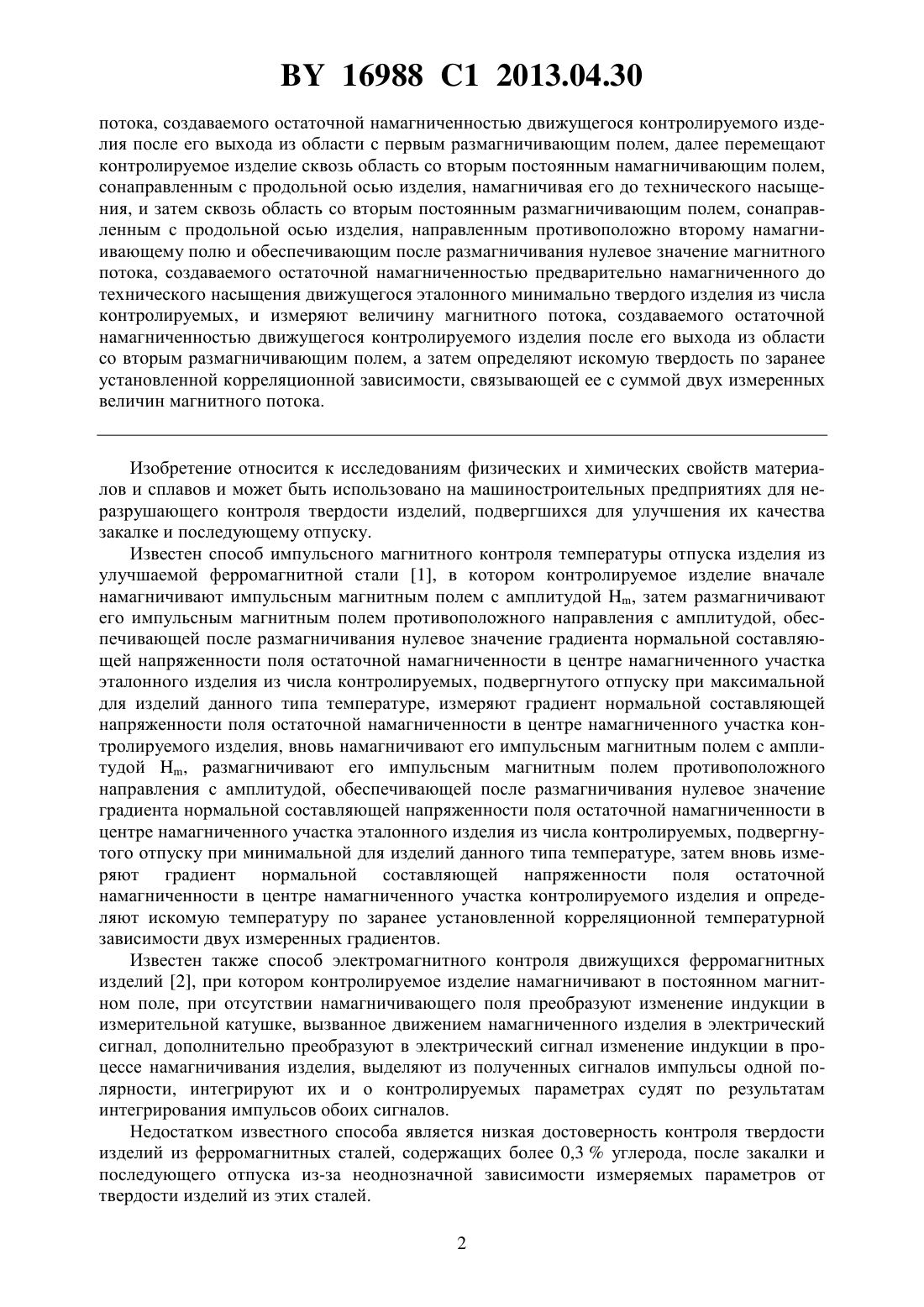
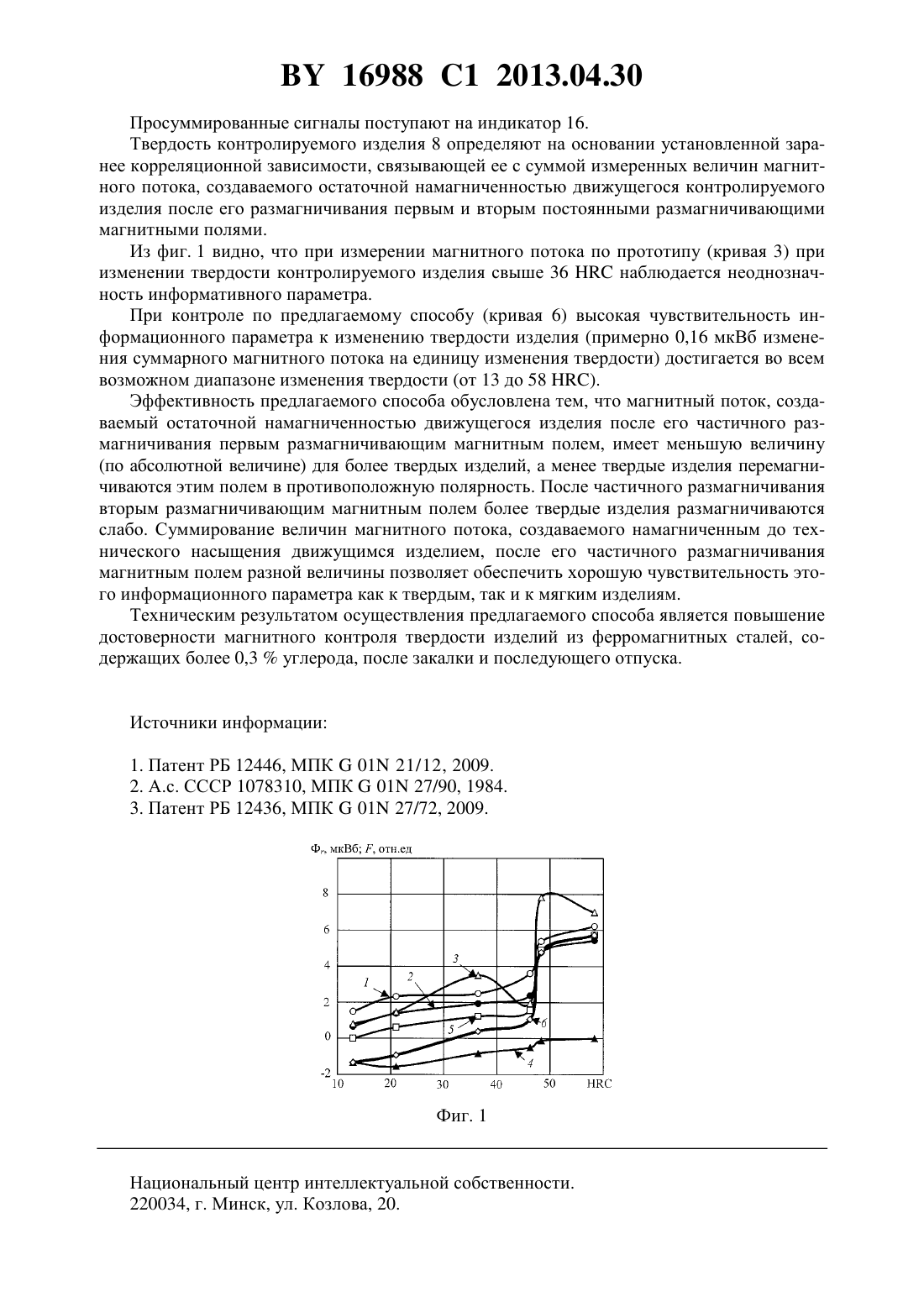
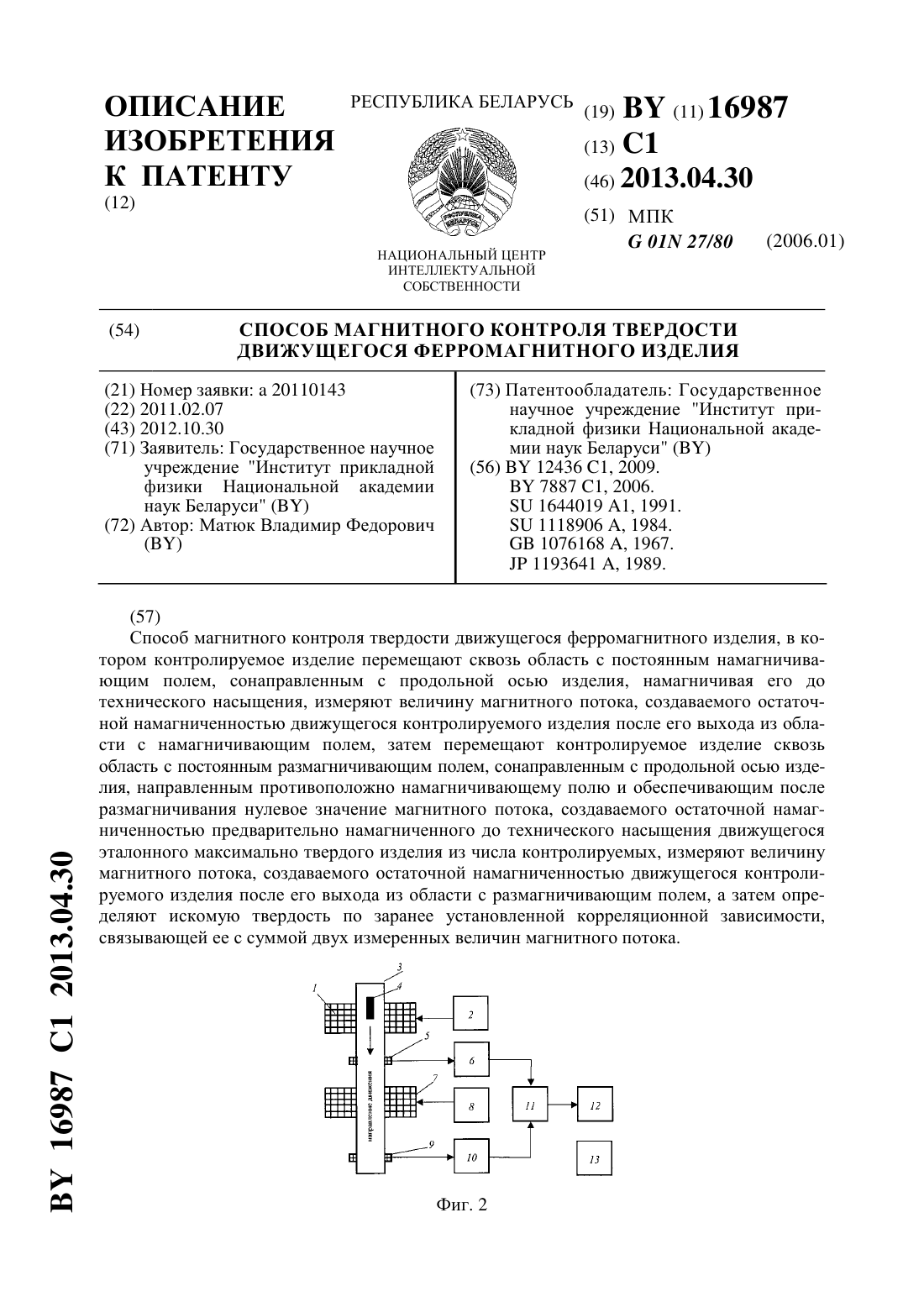
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ТВЕРДОСТИ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО ИЗДЕЛИЯ(71) Заявитель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(72) Автор Матюк Владимир Федорович(73) Патентообладатель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(57) Способ неразрушающего контроля твердости движущегося ферромагнитного изделия,в котором контролируемое изделие вначале перемещают сквозь область с первым постоянным намагничивающим полем, сонаправленным с продольной осью изделия, намагничивая его до технического насыщения, и затем сквозь область с первым постоянным размагничивающим полем, сонаправленным с продольной осью изделия, направленным противоположно первому намагничивающему полю и обеспечивающим после размагничивания нулевое значение магнитного потока, создаваемого остаточной намагниченностью предварительно намагниченного до технического насыщения движущегося эталонного максимально твердого изделия из числа контролируемых, и измеряют величину магнитного 16988 1 2013.04.30 потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его выхода из области с первым размагничивающим полем, далее перемещают контролируемое изделие сквозь область со вторым постоянным намагничивающим полем,сонаправленным с продольной осью изделия, намагничивая его до технического насыщения, и затем сквозь область со вторым постоянным размагничивающим полем, сонаправленным с продольной осью изделия, направленным противоположно второму намагниивающему полю и обеспечивающим после размагничивания нулевое значение магнитного потока, создаваемого остаточной намагниченностью предварительно намагниченного до технического насыщения движущегося эталонного минимально твердого изделия из числа контролируемых, и измеряют величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его выхода из области со вторым размагничивающим полем, а затем определяют искомую твердость по заранее установленной корреляционной зависимости, связывающей ее с суммой двух измеренных величин магнитного потока. Изобретение относится к исследованиям физических и химических свойств материалов и сплавов и может быть использовано на машиностроительных предприятиях для неразрушающего контроля твердости изделий, подвергшихся для улучшения их качества закалке и последующему отпуску. Известен способ импульсного магнитного контроля температуры отпуска изделия из улучшаемой ферромагнитной стали 1, в котором контролируемое изделие вначале намагничивают импульсным магнитным полем с амплитудой , затем размагничивают его импульсным магнитным полем противоположного направления с амплитудой, обеспечивающей после размагничивания нулевое значение градиента нормальной составляющей напряженности поля остаточной намагниченности в центре намагниченного участка эталонного изделия из числа контролируемых, подвергнутого отпуску при максимальной для изделий данного типа температуре, измеряют градиент нормальной составляющей напряженности поля остаточной намагниченности в центре намагниченного участка контролируемого изделия, вновь намагничивают его импульсным магнитным полем с амплитудой , размагничивают его импульсным магнитным полем противоположного направления с амплитудой, обеспечивающей после размагничивания нулевое значение градиента нормальной составляющей напряженности поля остаточной намагниченности в центре намагниченного участка эталонного изделия из числа контролируемых, подвергнутого отпуску при минимальной для изделий данного типа температуре, затем вновь измеряют градиент нормальной составляющей напряженности поля остаточной намагниченности в центре намагниченного участка контролируемого изделия и определяют искомую температуру по заранее установленной корреляционной температурной зависимости двух измеренных градиентов. Известен также способ электромагнитного контроля движущихся ферромагнитных изделий 2, при котором контролируемое изделие намагничивают в постоянном магнитном поле, при отсутствии намагничивающего поля преобразуют изменение индукции в измерительной катушке, вызванное движением намагниченного изделия в электрический сигнал, дополнительно преобразуют в электрический сигнал изменение индукции в процессе намагничивания изделия, выделяют из полученных сигналов импульсы одной полярности, интегрируют их и о контролируемых параметрах судят по результатам интегрирования импульсов обоих сигналов. Недостатком известного способа является низкая достоверность контроля твердости изделий из ферромагнитных сталей, содержащих более 0,3 углерода, после закалки и последующего отпуска из-за неоднозначной зависимости измеряемых параметров от твердости изделий из этих сталей. 2 16988 1 2013.04.30 Наиболее близким по технической сущности к настоящему изобретению является способ электромагнитного контроля механических свойств движущегося ферромагнитного изделия 3, в котором изделие в процессе движения намагничивают до состояния,близкого к техническому насыщению, проводят первое измерение остаточного магнитного потока в изделии после его выхода из области действия намагничивающего поля, создают на пути движения локальную область с размагничивающим полем, достаточным для его частичного размагничивания, производят второе измерение остаточного магнитного потока в изделии после его выхода из области действия размагничивающего поля и определяют искомые свойства изделия на основании заранее определенной корреляционной зависимости, связывающей их с отношением результата второго измерения к разности первого и второго измерений. Недостатком известного способа является низкая достоверность контроля твердости изделий из ферромагнитных сталей, содержащих более 0,3 углерода, после закалки и последующего отпуска из-за неоднозначности между информативным параметром и твердостью изделий из этих сталей. Цель настоящего изобретения - повышение достоверности контроля твердости изделий из ферромагнитных сталей, содержащих более 0,3 углерода, после закалки и последующего отпуска за счет использования другого информативного магнитного параметра. Сущность способа заключается в том, что контролируемое изделие вначале перемещают сквозь область с первым постоянным намагничивающим полем, сонаправленным с продольной осью изделия, намагничивая его до технического насыщения, и затем сквозь область с первым постоянным размагничивающим полем, сонаправленным с продольной осью изделия, направленным противоположно первому намагничивающему полю и обеспечивающим после размагничивания нулевое значение магнитного потока, создаваемого остаточной намагниченностью предварительно намагниченного до технического насыщения движущегося эталонного максимально твердого изделия из числа контролируемых, и измеряют величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его выхода из области с первым размагничивающим полем, далее перемещают контролируемое изделие сквозь область со вторым постоянным намагничивающим полем, сонаправленным с продольной осью изделия,намагничивая его до технического насыщения, и затем сквозь область со вторым постоянным размагничивающим полем, сонаправленным с продольной осью изделия, направленным противоположно второму намагничивающему полю и обеспечивающим после размагничивания нулевое значение магнитного потока, создаваемого остаточной намагниченностью предварительно намагниченного до технического насыщения движущегося эталонного минимально твердого изделия из числа контролируемых, и измеряют величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его выхода из области со вторым размагничивающим полем, а затем определяют искомую твердость по заранее установленной корреляционной зависимости, связывающей ее с суммой двух измеренных величин магнитного потока. В отличие от прототипа по заявляемому способу величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия, измеряют после его выхода из области с первым постоянным размагничивающим полем, сонаправленным с продольной осью изделия, направленным противоположно первому намагничивающему полю и обеспечивающим после размагничивания нулевое значение магнитного потока, создаваемого остаточной намагниченностью предварительно намагниченного до технического насыщения движущегося эталонного максимально твердого изделия из числа контролируемых, дополнительно перемещают контролируемое изделие сквозь область со вторым постоянным намагничивающим полем, сонаправленным с продольной осью изделия, намагничивая его до технического насыщения, и затем сквозь область со вторым постоянным размагничивающим полем, сонаправленным с продольной осью изделия,направленным противоположно второму намагничивающему полю и обеспечивающим 3 16988 1 2013.04.30 после размагничивания нулевое значение магнитного потока, создаваемого остаточной намагниченностью предварительно намагниченного до технического насыщения движущегося эталонного минимально твердого изделия из числа контролируемых, и измеряют величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его выхода из области со вторым размагничивающим полем, а затем определяют искомую твердость по заранее установленной корреляционной зависимости, связывающей ее с суммой двух измеренных величин магнитного потока. Это позволяет повысить достоверность контроля твердости подвергнутого отпуску движущегося ферромагнитного изделия за счет того, что величины магнитного потока,измеренные после первого и после второго частичного размагничивания магнитным полем заранее установленной величины, по-разному зависят от твердости изделия в области ее малых и в области ее больших значений, а используемая в качестве информационного параметра сумма величин этих магнитных потоков обеспечивает однозначность данного параметра к изменению твердости изделия во всем диапазоне ее изменения. На фиг. 1 показана зависимость магнитного потока Ф, создаваемого остаточной намагниченностью движущихся стержней диаметром 10 мм и длиной 60 мм из стали 45 от их твердости, измеренного после намагничивания (1), после намагничивания и частичного размагничивания полем напряженностью 1600 А/м (2), при использовании алгоритмапо прототипу (3), после намагничивания и частичного размагничивания полем напряженностью 3200 А/м (4), после намагничивания и частичного размагничивания полем, напряженностью 2000 А/м (5) и при использовании информативного параметра по данному способу (6). На фиг. 2 показана одна из возможных структурных схем устройства для реализации способа по заявке. Способ осуществляют следующим образом. Первое эталонное изделие из числа контролируемых с максимальной твердостью перемещают сквозь область с первым постоянным магнитным полем, достаточным для его намагничивания до технического насыщения и совпадающим по направлению с его продольной осью. Затем первое эталонное изделие перемещают сквозь область с первым постоянным размагничивающим магнитным полем, также соосным с продольной осью изделия, имеющим противоположную первому постоянному магнитному полю полярность. После выхода первого эталонного изделия из области влияния первого постоянного размагничивающего магнитного поля измеряют величину магнитного потока, создаваемого движущимся первым эталонным изделием. При неравенстве измеренной величины нулю изменяют величину первого постоянного размагничивающего магнитного поля(увеличивают в случае, если измеренная величина больше нуля, и уменьшают, если она меньше нуля), размагничивают первое эталонное изделие демагнитизатором и повторяют измерение. При равенстве измеренной величины нулю фиксируют величину первого постоянного размагничивающего магнитного поля. Второе эталонное изделие из числа контролируемых с минимальной твердостью перемещают сквозь область со вторым постоянным магнитным полем, достаточным для его намагничивания до технического насыщения и совпадающим по направлению с его продольной осью. Затем второе эталонное изделие перемещают сквозь область со вторым постоянным размагничивающим магнитным полем, также соосным с продольной осью изделия, имеющим противоположную второму постоянному магнитному полю полярность. После выхода второго эталонного изделия из области влияния второго постоянного размагничивающего магнитного поля измеряют величину магнитного потока, создаваемого движущимся вторым эталонным изделием. При неравенстве измеренной величины нулю изменяют величину второго постоянного размагничивающего магнитного поля(увеличивают в случае, если измеренная величина больше нуля, и уменьшают, если она меньше нуля), размагничивают второе эталонное изделие демагнитизатором и повторяют измерение. При равенстве измеренной величины нулю фиксируют величину первого постоянного размагничивающего магнитного поля. 4 16988 1 2013.04.30 После этого контролируемое изделие вначале перемещают сквозь область с первым постоянным магнитным полем, а затем сквозь область с первым постоянным размагничивающим магнитным полем зафиксированной величины и измеряют величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после выхода его из области влияния первого постоянного размагничивающего магнитного поля. Затем контролируемое изделие перемещают сквозь область со вторым постоянным магнитным полем, а после этого сквозь область со вторым постоянным размагничивающим магнитным полем зафиксированной величины и измеряют величину магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после выхода его из области влияния второго постоянного размагничивающего магнитного поля. После этого определяют искомую твердость на основании установленной заранее корреляционной зависимости, связывающей ее с суммой измеренных величин магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его размагничивания первым и вторым постоянными размагничивающими магнитными полями. Предложенный способ может быть реализован, например, с помощью устройства, показанного на фиг. 2. Устройство содержит намагничивающие 1 и 2, размагничивающие 3 и 4 и измерительные 5 и 6 катушки, соосные с направляющей 7, через которую пропускается контролируемое (или эталонное) изделие 8. Намагничивающие катушки 1 и 2 подсоединены к источникам 9 и 10 постоянного тока, размагничивающие катушки 3 и 4 подсоединены к источникам 11 и 12 регулируемого постоянного тока, а измерительные катушки 5 и 6 подсоединены ко входам измерительных каналов 13 и 14 соответственно. Выходы измерительных каналов 13 и 14 соединены с соответствующими входами сумматора 15, соединенного с индикатором 16. Устройство содержит также демагнитизатор 17. Способ реализуется следующим образом. Постоянный ток источника 9 постоянного тока, проходя через намагничивающую катушку 1, создает внутри нее постоянное магнитное поле. Вначале по направляющей 7 сквозь намагничивающую катушку 1 пропускается первое эталонное изделие 8, которое в процессе движения намагничивается магнитным полем этой катушки до состояния технического насыщения. Намагничивающая 2, размагничивающая 4 и измерительная 6 катушки при пропускании по направляющей 7 первого эталонного изделия отключены. В процессе движения сквозь размагничивающую катушку 3 первое эталонное изделие 8 частично размагничивается. Степень его размагничивания зависит от величины тока через размагничивающую катушку 3, устанавливаемого источником 11 регулируемого постоянного тока. Выходя из зоны влияния размагничивающего магнитного поля, создаваемого размагничивающей катушкой 3, первое эталонное изделие 8 пересекает сечение измерительной катушки 5 и вызывает изменение сцепленного с ней магнитного потока, индуцируя в измерительной катушке 5 сигнал, пропорциональный скорости изменения магнитного потока. Этот сигнал поступает на измерительный канал 13, где из него выделяется и интегрируется однополярный импульс напряжения. Величина проинтегрированного сигнала будет пропорциональна величине магнитного потока, создаваемого движущимся первым эталонным изделием 8. Сигнал, пропорциональный этой величине, подается через сумматор 13 на индикатор 16. В случае, если этот сигнал не равен нулю, эталонное изделие размагничивают демагнитизатором 17, изменяют величину тока через размагничивающую катушку 3 (увеличивают в случае, если измеренная величина больше нуля, и уменьшают,если она меньше нуля) и повторяют процесс. В случае равенства измеренной величины нулю фиксируют величину первого размагничивающего магнитного поля. Затем по направляющей 7 пропускается второе эталонное изделие 8. Намагничивающая 1, размагничивающая 3 и измерительная 5 катушки при пропускании по направляющей 7 второго эталонного изделия отключены. 5 16988 1 2013.04.30 Второе эталонное изделие 8 в процессе движения по направляющей 7 сквозь намагничивающую катушку 2 намагничивается полем этой катушки до состояния технического насыщения. В процессе движения сквозь размагничивающую катушку 4 второе эталонное изделие 8 частично размагничивается. Степень его размагничивания зависит от величины тока через размагничивающую катушку 4, устанавливаемого источником 12 регулируемого постоянного тока. Выходя из зоны влияния первого размагничивающего магнитного поля, создаваемого размагничивающей катушкой 4, второе эталонное изделие 8 пересекает сечение измерительной катушки 6 и вызывает изменение сцепленного с ней магнитного потока, индуцируя в измерительной катушке 5 сигнал, пропорциональный скорости изменения магнитного потока. Этот сигнал поступает на измерительный канал 14, где из него выделяется и интегрируется однополярный импульс напряжения. Величина проинтегрированного сигнала будет пропорциональна величине магнитного потока, создаваемого движущимся вторым эталонным изделием 8. Сигнал, пропорциональный этой величине,подается через сумматор 15 на индикатор 16. В случае, если этот сигнал не равен нулю,второе эталонное изделие 8 размагничивают демагнитизатором 17, изменяют величину тока через размагничивающую катушку 4 (увеличивают в случае, если измеренная величина больше нуля, и уменьшают, если она меньше нуля) и повторяют процесс. В случае равенства измеренной величины нулю фиксируют величину второго размагничивающего магнитного поля. После этого к соответствующим блокам подключаются все катушки, а сквозь направляющую 7 пропускается контролируемое изделие 8. В процессе движения по направляющей 7 сквозь намагничивающую катушку 1 оно намагничивается магнитным полем этой катушки до состояния технического насыщения. В процессе прохождения сквозь размагничивающую катушку 3 контролируемое изделие 8 частично размагничивается. Степень размагничивания контролируемого изделия 8 зависит от его свойств и от зафиксированной величины первого размагничивающего магнитного поля. В процессе движения по направляющей 7 контролируемое изделие 8 выходит из зоны влияния первого размагничивающего магнитного поля и пересекает сечение измерительной катушки 5, вызывая изменение сцепленного с ней магнитного потока. Это изменение индуцирует в измерительной катушке 5 сигнал, пропорциональный скорости изменения магнитного потока. Этот сигнал поступает на измерительный канал 13, где из него выделяется и интегрируется однополярный импульс напряжения. Величина проинтегрированного сигнала будет пропорциональна величине остаточного магнитного потока, создаваемого движущимся контролируемым изделием 8 после частичного размагничивания первым размагничивающим полем. Сигнал, пропорциональный этой величине, подается на первый вход сумматора 15. В процессе движения по направляющей 7 сквозь намагничивающую катушку 2 контролируемое изделие 8 вновь намагничивается до состояния технического насыщения, а при прохождении сквозь размагничивающую катушку 4 оно снова частично размагничивается. Степень второго размагничивания контролируемого изделия 8 зависит от его свойств и от зафиксированной величины второго размагничивающего магнитного поля. После выхода из зоны влияния второго размагничивающего магнитного поля размагничивающей катушки 4 контролируемое изделие 8 пересекает сечение измерительной катушки 6 и вызывает изменение сцепленного с ней магнитного потока, индуцируя в измерительной катушке 6 сигнал, пропорциональный скорости изменения магнитного потока. Этот сигнал поступает на измерительный канал 14, где из него выделяется и интегрируется однополярный импульс напряжения. Величина проинтегрированного сигнала будет пропорциональна величине остаточного магнитного потока, создаваемого движущимся контролируемым изделием 8 после второго частичного размагничивания. Сигнал, пропорциональный этой величине, подается на второй вход сумматора 15. 6 16988 1 2013.04.30 Просуммированные сигналы поступают на индикатор 16. Твердость контролируемого изделия 8 определяют на основании установленной заранее корреляционной зависимости, связывающей ее с суммой измеренных величин магнитного потока, создаваемого остаточной намагниченностью движущегося контролируемого изделия после его размагничивания первым и вторым постоянными размагничивающими магнитными полями. Из фиг. 1 видно, что при измерении магнитного потока по прототипу (кривая 3) при изменении твердости контролируемого изделия свыше 36 наблюдается неоднозначность информативного параметра. При контроле по предлагаемому способу (кривая 6) высокая чувствительность информационного параметра к изменению твердости изделия (примерно 0,16 мкВб изменения суммарного магнитного потока на единицу изменения твердости) достигается во всем возможном диапазоне изменения твердости (от 13 до 58 ). Эффективность предлагаемого способа обусловлена тем, что магнитный поток, создаваемый остаточной намагниченностью движущегося изделия после его частичного размагничивания первым размагничивающим магнитным полем, имеет меньшую величину(по абсолютной величине) для более твердых изделий, а менее твердые изделия перемагничиваются этим полем в противоположную полярность. После частичного размагничивания вторым размагничивающим магнитным полем более твердые изделия размагничиваются слабо. Суммирование величин магнитного потока, создаваемого намагниченным до технического насыщения движущимся изделием, после его частичного размагничивания магнитным полем разной величины позволяет обеспечить хорошую чувствительность этого информационного параметра как к твердым, так и к мягким изделиям. Техническим результатом осуществления предлагаемого способа является повышение достоверности магнитного контроля твердости изделий из ферромагнитных сталей, содержащих более 0,3 углерода, после закалки и последующего отпуска. Источники информации 1. Патент РБ 12446, МПК 01 21/12, 2009. 2. А.с. СССР 1078310, МПК 01 27/90, 1984. 3. Патент РБ 12436, МПК 01 27/72, 2009. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: G01N 27/80
Метки: способ, ферромагнитного, неразрушающего, контроля, изделия, движущегося, твердости
Код ссылки
<a href="https://by.patents.su/7-16988-sposob-nerazrushayushhego-kontrolya-tverdosti-dvizhushhegosya-ferromagnitnogo-izdeliya.html" rel="bookmark" title="База патентов Беларуси">Способ неразрушающего контроля твердости движущегося ферромагнитного изделия</a>
Способ магнитного контроля твердости движущегося ферромагнитного изделия
Номер патента: 16987
Опубликовано: 30.04.2013
Автор: Матюк Владимир Федорович
МПК: G01N 27/80
Метки: твердости, изделия, магнитного, контроля, ферромагнитного, движущегося, способ
Текст:
...намагничивания и частичного размагничивания полем напряженностью 3200 А/м (4) и при использовании информативного параметра по данному способу (5). На фиг. 2 показана одна из возможных структурных схем устройства для реализации способа по заявке. Способ осуществляют следующим образом. Эталонное изделие из числа контролируемых с максимальной твердостью перемещают сквозь область с постоянным магнитным полем, достаточным для его...
Способ магнитного контроля механических свойств движущегося ферромагнитного изделия, подвергнутого отпуску с предварительной закалкой
Номер патента: 16463
Опубликовано: 30.10.2012
Автор: Матюк Владимир Федорович
МПК: G01N 27/72
Метки: механических, движущегося, магнитного, ферромагнитного, изделия, свойств, способ, контроля, отпуску, предварительной, закалкой, подвергнутого
Текст:
...и механических свойств изделий из этих сталей в области высокотемпературного отпуска. На фиг. 1 показана одна из возможных структурных схем устройства для реализации способа по заявке. На фиг. 2 показана зависимость остаточного магнитного потока стержней диаметром 10 мм и длиной 60 мм из стали 45 от температуры их отпуска, измеренного по прототипу(1) и по предлагаемому способу (2). При контроле по прототипу величина размагничивающего...
Способ электромагнитного контроля механических свойств движущегося ферромагнитного изделия
Номер патента: 12436
Опубликовано: 30.10.2009
Авторы: Синякович Эдуард Брониславович, Сандомирский Сергей Григорьевич
МПК: G01N 27/72
Метки: контроля, механических, изделия, ферромагнитного, способ, свойств, электромагнитного, движущегося
Текст:
...первого и второго измерений (прототип предложенного изобретения) позволяет получить информационный параметр контроля, пропорциональный коэрцитивной силе материала изделий и менее зависимый от влияния изменений размеров контролируемых изделий на результаты контроля. Это повышает достоверность контроля. Но коэрцитивная сила среднеуглеродистых легированных сталей и остаточный магнитный поток Ф (Ф 1) в изделиях из них не однозначно связаны с...
Устройство для магнитного контроля механических свойств движущегося ферромагнитного изделия

Номер патента: U 7236
Опубликовано: 30.04.2011
Автор: Матюк Владимир Федорович
МПК: G01N 27/72
Метки: магнитного, движущегося, свойств, контроля, ферромагнитного, механических, устройство, изделия
Текст:
...с направляющей третью измерительную обмотку, расположенную по ходу движения контролируемого изделия перед намагничивающей катушкой вне зоны влияния ее магнитного поля, третий измерительный блок и коммутатор, включенный между источником постоянного поля и намагничивающей катушкой. В отличие от прототипа в предлагаемую полезную модель дополнительно введены последовательно соединенные соосная с направляющей третья измерительная обмотка,...
Способ контроля толщины и твердости поверхностно-упрочненного слоя изделия из ферромагнитного материала
Номер патента: 10698
Опубликовано: 30.06.2008
Авторы: Пинчуков Дмитрий Анатольевич, Мельгуй Михаил Александрович, Матюк Владимир Федорович
МПК: G01N 27/80, G01N 27/72, G01B 7/02...
Метки: поверхностно-упрочненного, изделия, материала, толщины, слоя, способ, твердости, контроля, ферромагнитного
Текст:
...серией, а толщинуупрочненного слоя и твердостьего поверхности определяют по уравнениям множественной корреляции типа(2)01230456 ,где числоимпульсов в четвертой серии и коэффициенты а 0, а 1, а 2, а 3, а 4, 5, 6 и 0, 1, 2,3, 4, 5, 6 установлены предварительно из условия получения минимальных среднеквадратических отклоненийи максимальных коэффициентов корреляции . На фиг. 1 показана последовательность изменения амплитуды импульсов...
Предыдущий патент: Устройство для синхронизации приводов исполнительных органов шлицефрезерного станка
Следующий патент: Пневматическая шина
Случайный патент: Устройство для концентрации солнечной энергии и преобразования ее в электрическую