Датчик положения ротора
Номер патента: U 9054
Опубликовано: 28.02.2013
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
Текст
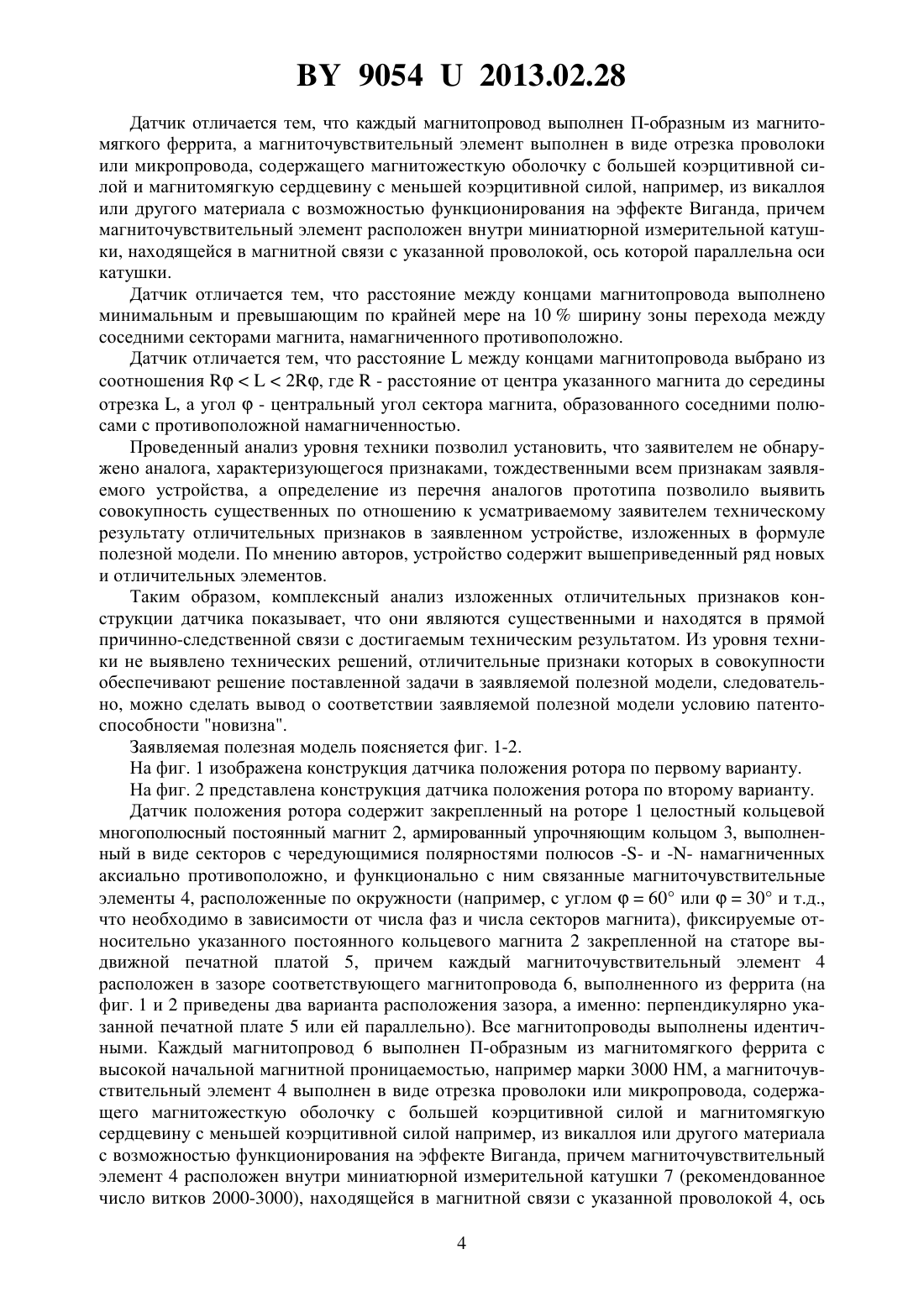
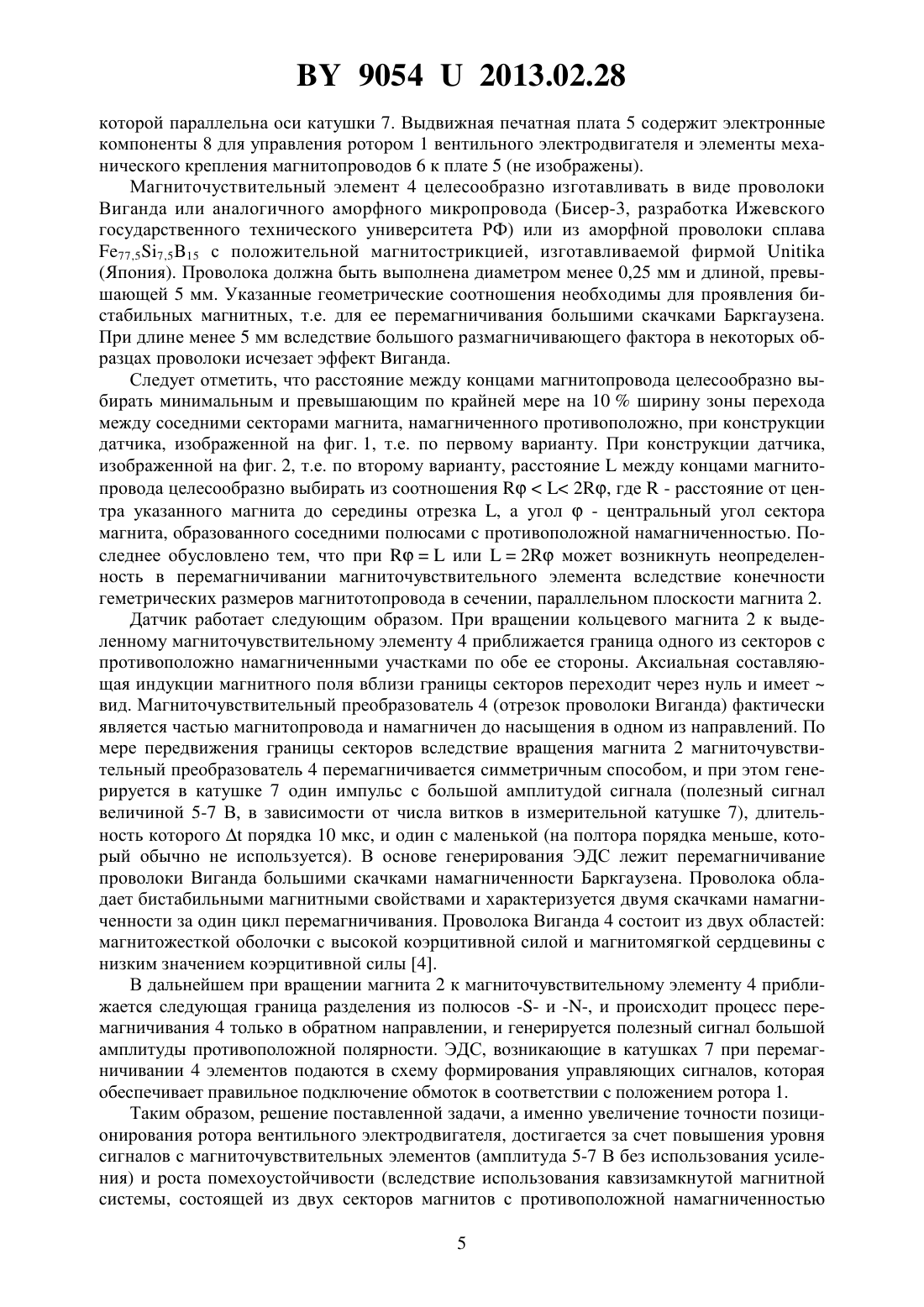
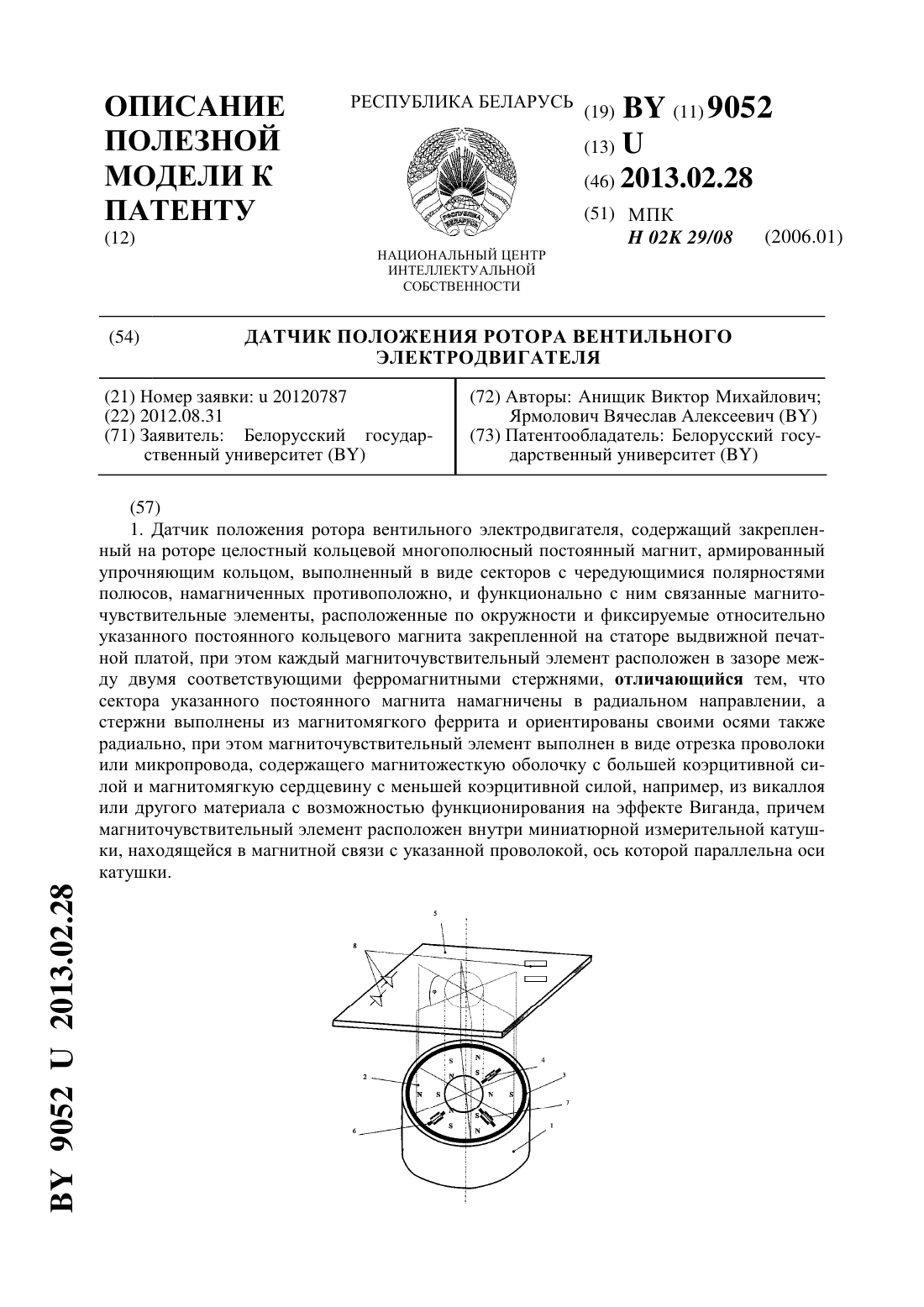
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) 1. Датчик положения ротора, содержащий закрепленный на роторе целостный кольцевой многополюсный постоянный магнит, армированный упрочняющим кольцом, выполненный в виде секторов с чередующимися полярностями полюсов, намагниченных аксиально противоположно, и функционально с ним связанные магниточувствительные элементы, фиксируемые относительно указанного постоянного кольцевого магнита закрепленной на статоре выдвижной печатной платой, причем каждый магниточувствительный элемент расположен в зазоре соответствующего магнитопровода, выполненного из феррита,отличающийся тем, что каждый магнитопровод выполнен П-образным из магнитомягкого феррита, а магниточувствительный элемент выполнен в виде отрезка проволоки или микропровода, содержащего магнитожесткую оболочку с большей коэрцитивной силой и магнитомягкую сердцевину с меньшей коэрцитивной силой, например, из викаллоя или другого материала с возможностью функционирования на эффекте Виганда, причем магниточувствительный элемент расположен внутри миниатюрной измерительной катушки, находящейся в магнитной связи с указанной проволокой, ось которой параллельна оси катушки. 90542013.02.28 2. Датчик по п. 1, отличающийся тем, что расстояние между концами магнитопровода выполнено минимальным и превышающим по крайней мере на 10 ширину зоны перехода между соседними секторами магнита, намагниченного противоположно. 3. Датчик по п. 1, отличающийся тем, что расстояниемежду концами магнитопровода выбрано из соотношения 2, где- расстояние от центра указанного магнита до середины отрезка , а угол- центральный угол сектора магнита, образованного соседними полюсами с противоположной намагниченностью.(56) 1.1617553, МПК 02 29/08, 1990. 2.1419531, МПК 02 29/08. 1988. 3.4567, МПК 702 29/08, 2002 (прототип). 4. Бараночников М.Л. Микромагнитоэлектроника. Т. 1. - М. ДМК Пресс, 2001. - 544 с. С. 88-89. Заявляемая полезная модель относится к вентильным электродвигателям, а именно к прецизионным датчикам положения ротора для вентильных электродвигателей и может быть использовано для прецизионного определения положения ротора. Известен датчик положения ротора (ДПР), содержащий армированный упрочняющим кольцом аксиально намагниченный кольцевой магнит с примыкающим к его торцевым поверхностям магнитопроводом с секторными зубцами, закрепленный на валу ротора, а также неподвижные магниточувствительные элементы Холла, закрепленные на статоре 1. При вращении ротора ДПР каждый из чувствительных элементов поочередно находится либо в аксиальном поле между зубцами, либо в зоне отсутствия этого поля, а точнее, в поле рассеяния кольцевого магнита, которое ниже уровня срабатывания магниточувствительных элементов. Датчик 1 не обладает достаточной прецизионностью определения положения ротора в зоне перехода от наличия магнитного поля между зубцами к полю рассеяния аксиального магнита. Эта зона изменения величины магнитной индукции является плавной и достаточно широкой, в связи с этим возникает неопределенный интервал (зона нечувствительности) в определении положения ротора, а именно в это время должны происходить процессы коммутации в обмотках электродвигателя. Уменьшить ширину перехода величины магнитной индукции соответствующей логической единицы к величине соответствующей логическому нулю можно использовав переход ее через нуль в магнитных системах, состоящих из противоположно намагниченных полюсов, т.е. - и -. Другим недостатком 1 является повышенное энергопотребление, обусловленное тем, что каждый элемент Холла и схема электроники потребляют ток в непрерывном режиме свыше 50 мА,что затрудняет его использование в автономных устройствах (в вентильных микродвигателях), где вся электроника питается от аккумуляторных батарей. Кроме того, аналоговый сигнал требует усиления и тщательного электромагнитного экранирования. Из уровня техники известен ДПР 2 для вентильного двигателя. Ротор датчика положения имеет форму плоского диска, расположенного на валу двигателя, и состоит из корпуса из синтетической смолы, в котором утоплены постоянные магниты в форме кольцевых сегментов. Постоянные магниты расположены таким образом, что рабочие поверхности полюсов, следуя друг за другом по окружности, образуют чередующуюся полярность. Магниточувствительные элементы Холла закреплены в отверстиях изолирующей пластины, которая размещена на статорном фланце. В данном ДПР применение чередующихся полярностей магнитов позволяет вырабатывать сигнал управления фазы 90542013.02.28 электродвигателя при переходе величины индукции магнитного поля через нуль, тем самым уменьшая неопределенность в положении ротора. Однако применение связующего в виде эпоксидной смолы или других полимеризующих наполнителей способствует созданию неконтролируемого разброса ширины немагнитных участков между магнитами, изменению технических характеристик обоймы магнитов под воздействием температуры и центробежных усилий, вызывающих пластические деформации полимеров. Кроме того, неоднородные участки магнит-связующее-магнит имеют низкую прочность, что ограничивает их применение в высокоскоростных вентильных электродвигателях. Тем самым в основном из-за временной нестабильности в данном датчике невысока точность позиционирования с помощью магниточувствительных элементов. Еще недостатком 2 является повышенное энергопотребление, обусловленное тем, что каждый элемент Холла и схема электроники потребляют ток в непрерывном режиме свыше 50 мА, что затрудняет его использование в автономных устройствах (в вентильных микродвигателях), где вся электроника питается от аккумуляторных батарей. Кроме того,аналоговый сигнал требует усиления и тщательного электромагнитного экранирования. Наиболее близким по технической реализации к предлагаемому решению является датчик 3 (прототип). Это техническое решение содержит закрепленный на роторе кольцевой многополюсный постоянный магнит с чередующимися полярностями полюсов и функционально с ним связанные магниточувствительные элементы Холла, фиксируемые относительно постоянного кольцевого магнита закрепленной на статоре выдвижной печатной платой, и отличается от 2 тем, что содержит магнитопровод, выполненный в виде ферромагнитных стержней с прямоугольной петлей гистерезиса, которые зафиксированы на выдвижной печатной плате в зоне функционирования магниточувствительных элементов Холла, при этом каждый магниточувствительный элемент Холла расположен на соответствующем ферромагнитном стержне или в узком зазоре между двумя соответствующими ферромагнитными стержнями, а кольцевой многополюсный магнит выполнен целостным, намагниченным сегментарно в аксиальном направлении. Дополнительно целостный кольцевой магнит армирован упрочняющим кольцом. Тем не менее описанное устройство (прототип) обладает следующим недостатком повышенное энергопотребление, обусловленное тем, что каждый элемент Холла и схема электроники потребляют ток в непрерывном режиме свыше 50 мА (обычно используется 6 или 12 магниточувствительных элементов Холла), что затрудняет его использование в автономных устройствах (в вентильных микродвигателях), где вся электроника питается от аккумуляторных батарей. Кроме того, аналоговый сигнал небольшой по амплитуде, следовательно требуется усиление сигнала. Магнитная система (магнит - ферромагнитные стержни) является открытой (не замкнутой), следовательно обладает низкой помехоустойчивостью при воздействии электромагнитных помех. Задачей, решаемой в настоящей полезной модели, является увеличение точности позиционирования ротора вентильного электродвигателя за счет повышения уровня сигналов с магниточувствительных элементов и роста помехоустойчивости, а также значительное снижение электропотребления (энергопотребление используется электронной схемой только для обработки импульсных сигналов с магниточувствительных элементов,что относится к устройству управления вентильным электродвигателем). Для решения поставленной комплексной задачи датчик положения ротора содержит закрепленный на роторе целостный кольцевой многополюсный постоянный магнит, армированный упрочняющим кольцом, выполненный в виде секторов с чередующимися полярностями полюсов, намагниченных аксиально противоположно, и функционально с ним связанные магниточувствительные элементы, фиксируемые относительно указанного постоянного кольцевого магнита закрепленной на статоре выдвижной печатной платой,причем каждый магниточувствительный элемент расположен в зазоре соответствующего магнитопровода, выполненного из феррита. 3 90542013.02.28 Датчик отличается тем, что каждый магнитопровод выполнен П-образным из магнитомягкого феррита, а магниточувствительный элемент выполнен в виде отрезка проволоки или микропровода, содержащего магнитожесткую оболочку с большей коэрцитивной силой и магнитомягкую сердцевину с меньшей коэрцитивной силой, например, из викаллоя или другого материала с возможностью функционирования на эффекте Виганда, причем магниточувствительный элемент расположен внутри миниатюрной измерительной катушки, находящейся в магнитной связи с указанной проволокой, ось которой параллельна оси катушки. Датчик отличается тем, что расстояние между концами магнитопровода выполнено минимальным и превышающим по крайней мере на 10 ширину зоны перехода между соседними секторами магнита, намагниченного противоположно. Датчик отличается тем, что расстояниемежду концами магнитопровода выбрано из соотношения 2, где- расстояние от центра указанного магнита до середины отрезка , а угол- центральный угол сектора магнита, образованного соседними полюсами с противоположной намагниченностью. Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемого устройства, а определение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле полезной модели. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов. Таким образом, комплексный анализ изложенных отличительных признаков конструкции датчика показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых в совокупности обеспечивают решение поставленной задачи в заявляемой полезной модели, следовательно, можно сделать вывод о соответствии заявляемой полезной модели условию патентоспособности новизна. Заявляемая полезная модель поясняется фиг. 1-2. На фиг. 1 изображена конструкция датчика положения ротора по первому варианту. На фиг. 2 представлена конструкция датчика положения ротора по второму варианту. Датчик положения ротора содержит закрепленный на роторе 1 целостный кольцевой многополюсный постоянный магнит 2, армированный упрочняющим кольцом 3, выполненный в виде секторов с чередующимися полярностями полюсов и намагниченных аксиально противоположно, и функционально с ним связанные магниточувствительные элементы 4, расположенные по окружности (например, с углом 60 или 30 и т.д.,что необходимо в зависимости от числа фаз и числа секторов магнита), фиксируемые относительно указанного постоянного кольцевого магнита 2 закрепленной на статоре выдвижной печатной платой 5, причем каждый магниточувствительный элемент 4 расположен в зазоре соответствующего магнитопровода 6, выполненного из феррита (на фиг. 1 и 2 приведены два варианта расположения зазора, а именно перпендикулярно указанной печатной плате 5 или ей параллельно). Все магнитопроводы выполнены идентичными. Каждый магнитопровод 6 выполнен П-образным из магнитомягкого феррита с высокой начальной магнитной проницаемостью, например марки 3000 НМ, а магниточувствительный элемент 4 выполнен в виде отрезка проволоки или микропровода, содержащего магнитожесткую оболочку с большей коэрцитивной силой и магнитомягкую сердцевину с меньшей коэрцитивной силой например, из викаллоя или другого материала с возможностью функционирования на эффекте Виганда, причем магниточувствительный элемент 4 расположен внутри миниатюрной измерительной катушки 7 (рекомендованное число витков 2000-3000), находящейся в магнитной связи с указанной проволокой 4, ось 4 90542013.02.28 которой параллельна оси катушки 7. Выдвижная печатная плата 5 содержит электронные компоненты 8 для управления ротором 1 вентильного электродвигателя и элементы механического крепления магнитопроводов 6 к плате 5 (не изображены). Магниточуствительный элемент 4 целесообразно изготавливать в виде проволоки Виганда или аналогичного аморфного микропровода (Бисер-3, разработка Ижевского государственного технического университета РФ) или из аморфной проволоки сплава 77,57,515 с положительной магнитострикцией, изготавливаемой фирмой(Япония). Проволока должна быть выполнена диаметром менее 0,25 мм и длиной, превышающей 5 мм. Указанные геометрические соотношения необходимы для проявления бистабильных магнитных, т.е. для ее перемагничивания большими скачками Баркгаузена. При длине менее 5 мм вследствие большого размагничивающего фактора в некоторых образцах проволоки исчезает эффект Виганда. Следует отметить, что расстояние между концами магнитопровода целесообразно выбирать минимальным и превышающим по крайней мере на 10 ширину зоны перехода между соседними секторами магнита, намагниченного противоположно, при конструкции датчика, изображенной на фиг. 1, т.е. по первому варианту. При конструкции датчика,изображенной на фиг. 2, т.е. по второму варианту, расстояниемежду концами магнитопровода целесообразно выбирать из соотношения 2, где- расстояние от центра указанного магнита до середины отрезка , а угол- центральный угол сектора магнита, образованного соседними полюсами с противоположной намагниченностью. Последнее обусловлено тем, что приили 2 может возникнуть неопределенность в перемагничивании магниточувствительного элемента вследствие конечности геметрических размеров магнитотопровода в сечении, параллельном плоскости магнита 2. Датчик работает следующим образом. При вращении кольцевого магнита 2 к выделенному магниточувствительному элементу 4 приближается граница одного из секторов с противоположно намагниченными участками по обе ее стороны. Аксиальная составляющая индукции магнитного поля вблизи границы секторов переходит через нуль и имеетвид. Магниточувствительный преобразователь 4 (отрезок проволоки Виганда) фактически является частью магнитопровода и намагничен до насыщения в одном из направлений. По мере передвижения границы секторов вследствие вращения магнита 2 магниточувствительный преобразователь 4 перемагничивается симметричным способом, и при этом генерируется в катушке 7 один импульс с большой амплитудой сигнала (полезный сигнал величиной 5-7 В, в зависимости от числа витков в измерительной катушке 7), длительность которогопорядка 10 мкс, и один с маленькой (на полтора порядка меньше, который обычно не используется). В основе генерирования ЭДС лежит перемагничивание проволоки Виганда большими скачками намагниченности Баркгаузена. Проволока обладает бистабильными магнитными свойствами и характеризуется двумя скачками намагниченности за один цикл перемагничивания. Проволока Виганда 4 состоит из двух областей магнитожесткой оболочки с высокой коэрцитивной силой и магнитомягкой сердцевины с низким значением коэрцитивной силы 4. В дальнейшем при вращении магнита 2 к магниточувствительному элементу 4 приближается следующая граница разделения из полюсов и , и происходит процесс перемагничивания 4 только в обратном направлении, и генерируется полезный сигнал большой амплитуды противоположной полярности. ЭДС, возникающие в катушках 7 при перемагничивании 4 элементов подаются в схему формирования управляющих сигналов, которая обеспечивает правильное подключение обмоток в соответствии с положением ротора 1. Таким образом, решение поставленной задачи, а именно увеличение точности позиционирования ротора вентильного электродвигателя, достигается за счет повышения уровня сигналов с магниточувствительных элементов (амплитуда 5-7 В без использования усиления) и роста помехоустойчивости (вследствие использования кавзизамкнутой магнитной системы, состоящей из двух секторов магнитов с противоположной намагниченностью 5 90542013.02.28 полюсов и магнитопровода с зазором, в котором расположена проволока Виганда с магнитомягкой сердцевиной), а также достигается значительное снижение электропотребления (энергопотребление используется электронной схемой только для обработки импульсных сигналов с магниточувствительных элементов, что относится к устройству управления вентильным электродвигателем). Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемая полезная модель соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: H02K 29/08
Метки: положения, датчик, ротора
Код ссылки
<a href="https://by.patents.su/6-u9054-datchik-polozheniya-rotora.html" rel="bookmark" title="База патентов Беларуси">Датчик положения ротора</a>
Датчик положения ротора трехфазного электродвигателя
Номер патента: 14636
Опубликовано: 30.08.2011
Авторы: Говор Геннадий Антонович, Дубровенский Владимир Михайлович
МПК: H02P 6/00, H02K 29/06
Метки: положения, ротора, датчик, трехфазного, электродвигателя
Текст:
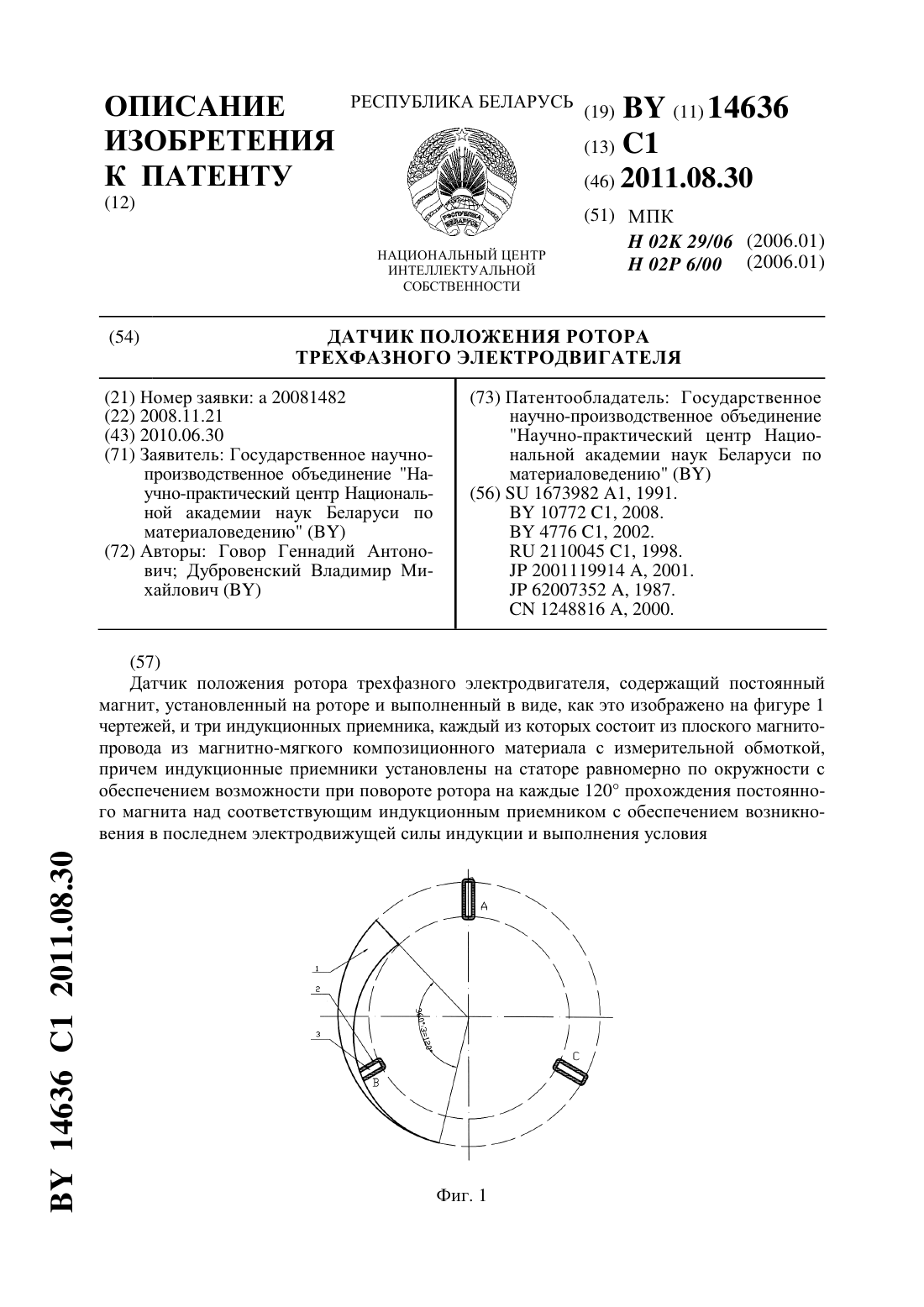
...приемники установлены на статоре равномерно по окружности с обеспечением возможности при повороте ротора на каждые 120 прохождения постоянного магнита над соответствующим индукционным приемником с обеспечением возникновения в последнем электродвижущей силы индукции и выполнения условия/,где- элементарная площадь магнита, перекрываемая индукционным приемником. Сущность изобретения поясняется рисунками, где на фиг. 1 показан общий вид...
Датчик положения ротора вентильного электродвигателя
Номер патента: U 9052
Опубликовано: 28.02.2013
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: H02K 29/08
Метки: вентильного, датчик, положения, ротора, электродвигателя
Текст:
...схемой только для обработки импульсных сигналов с магниточувствительных элементов, что относится к устройству управления вентильным электродвигателем). Для решения поставленной комплексной задачи датчик положения ротора вентильного электродвигателя содержит закрепленный на роторе целостный кольцевой многополюсный постоянный магнит, армированный упрочняющим кольцом, выполненный в виде секторов с чередующимися полярностями полюсов,...
Прецизионный датчик положения ротора для вентильных электродвигателей

Номер патента: U 1430
Опубликовано: 30.06.2004
Авторы: Шафранский Валентин Иванович, Литовко Владимир Иосифович
МПК: H02K 29/08
Метки: датчик, электродвигателей, положения, прецизионный, ротора, вентильных
Текст:
...петлей гистерезиса. Общий для элементов Холла ферромагнитный сердечник замыкает на себя постороннее магнитное поле, поэтому он защищает от посторонних помех, что также повышает точность информации ДПР. При возрастании точности информации ДПР увеличивается КПД и уменьшается удельный расход материалов для электродвигателя. Это можно доказать следующим образом. 2 1430 Вращающий момент электродвигателя 3 МсФ,(1) где с - коэффициент,Ф -...
Прецизионный датчик положения ротора для вентильных электродвигателей
Номер патента: 10772
Опубликовано: 30.06.2008
Авторы: Шафранский Валентин Иванович, Литовко Владимир Иосифович
МПК: H02K 29/06, H02P 6/00
Метки: положения, электродвигателей, ротора, датчик, вентильных, прецизионный
Текст:
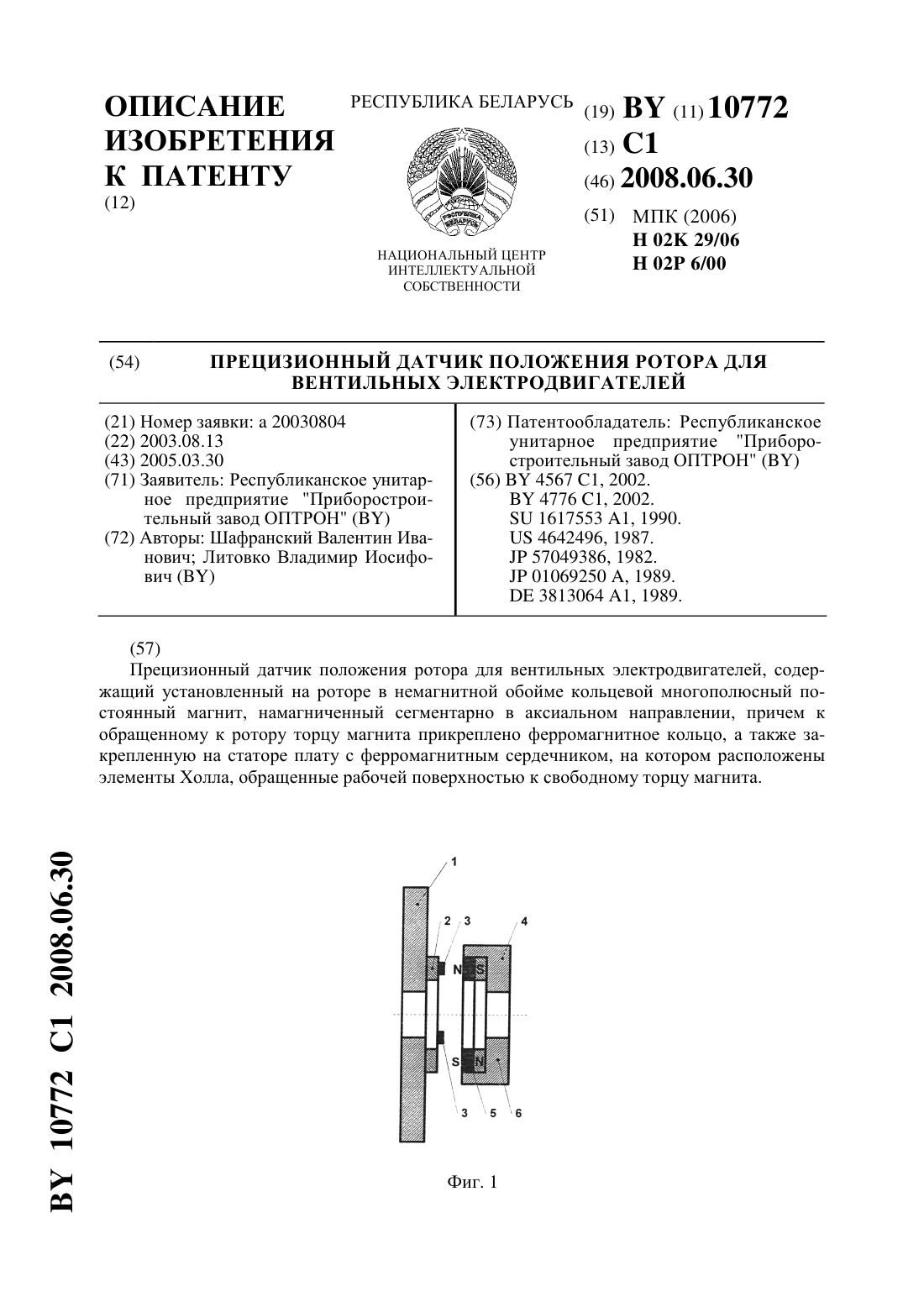
...- магнитный поток ротора, - магнитодвижущая сила (МДС) статора, - угол между осями МДС и магнитного потока,сФ - максимальный момент. В вентильном двигателе за один период происходит в общем случаепереключений(коммутаций), а за межкоммутационный период 2 к 10772 1 2008.06.30 электрических радиан угол изменяется от некоторого значения 1 до 2. Следовательно,среднее значение момента(3) 2 к Отсюда следует, что средний момент будет наибольший, если...
Прецизионный датчик положения ротора для управляемых вентильных электродвигателей
Номер патента: 4567
Опубликовано: 30.09.2002
Авторы: Потапов Александр Львович, Ярмолович Вячеслав Алексеевич, Марченко Владимир Алексеевич, Тарасов Альберт Николаевич, Прокошин Валерий Иванович, Драпезо Александр Петрович
МПК: H02K 29/08
Метки: управляемых, вентильных, ротора, датчик, прецизионный, положения, электродвигателей
Текст:
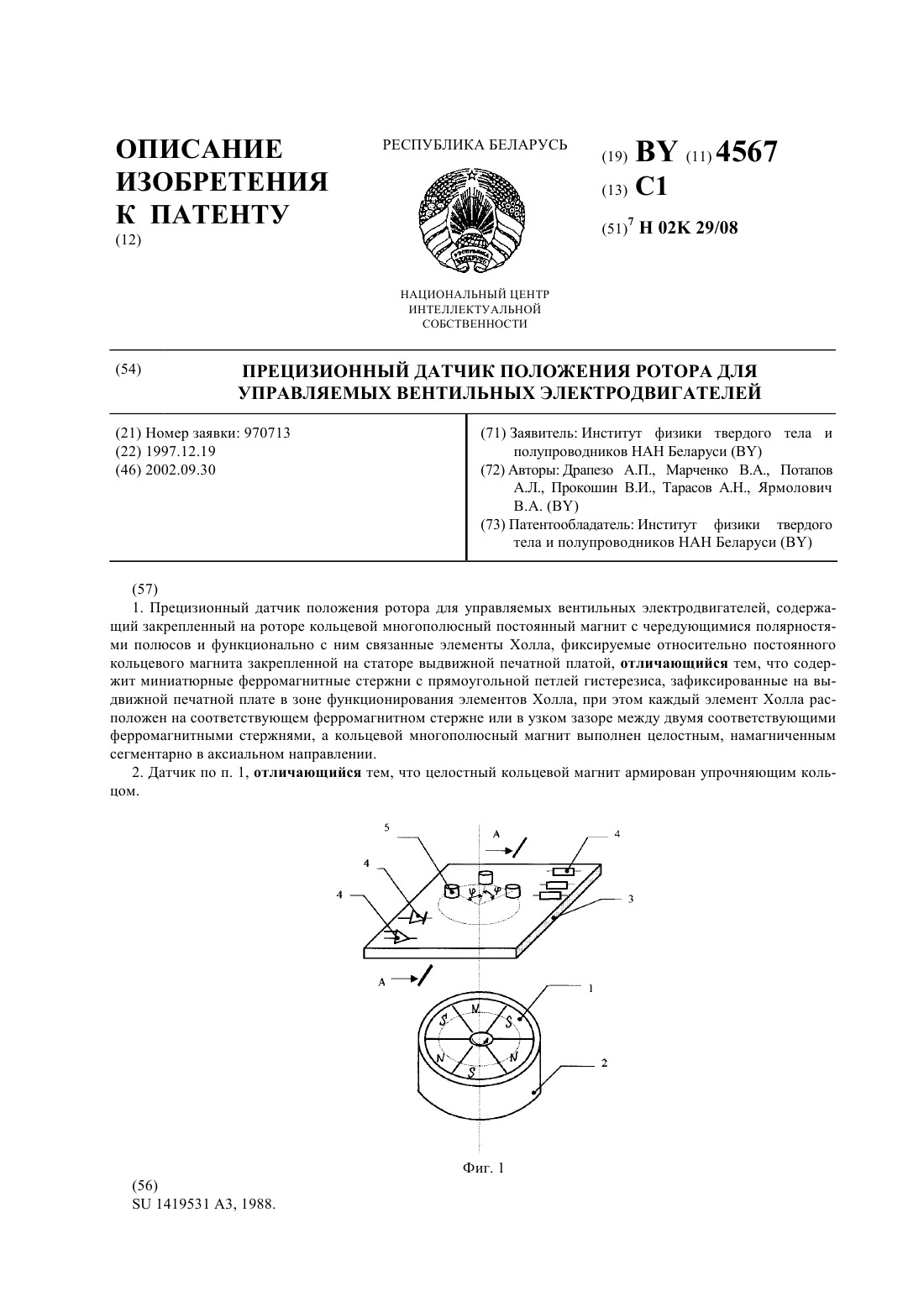
...введение миниатюрных ферромагнитных стержней с ППГ в зону функционирования элемента Холла обеспечивает повышение крутизны выходной характеристики ДПР, обеспечивает формирование узкой зоны перехода величины индукции магнитного поля через нуль при перемещении секторов магнита от - к - или наоборот, что и приводит к повышению точности позиционирования ротора. Сопутствующим положительным дополнительным эффектом является увеличение прочностных...
Предыдущий патент: Сильфонный датчик температуры
Следующий патент: Каскадный вибропневмосепаратор
Случайный патент: Привод механизма передвижения мостового крана