Система управления положением корпуса гусеничной машины
Номер патента: U 615
Опубликовано: 30.09.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич

Текст
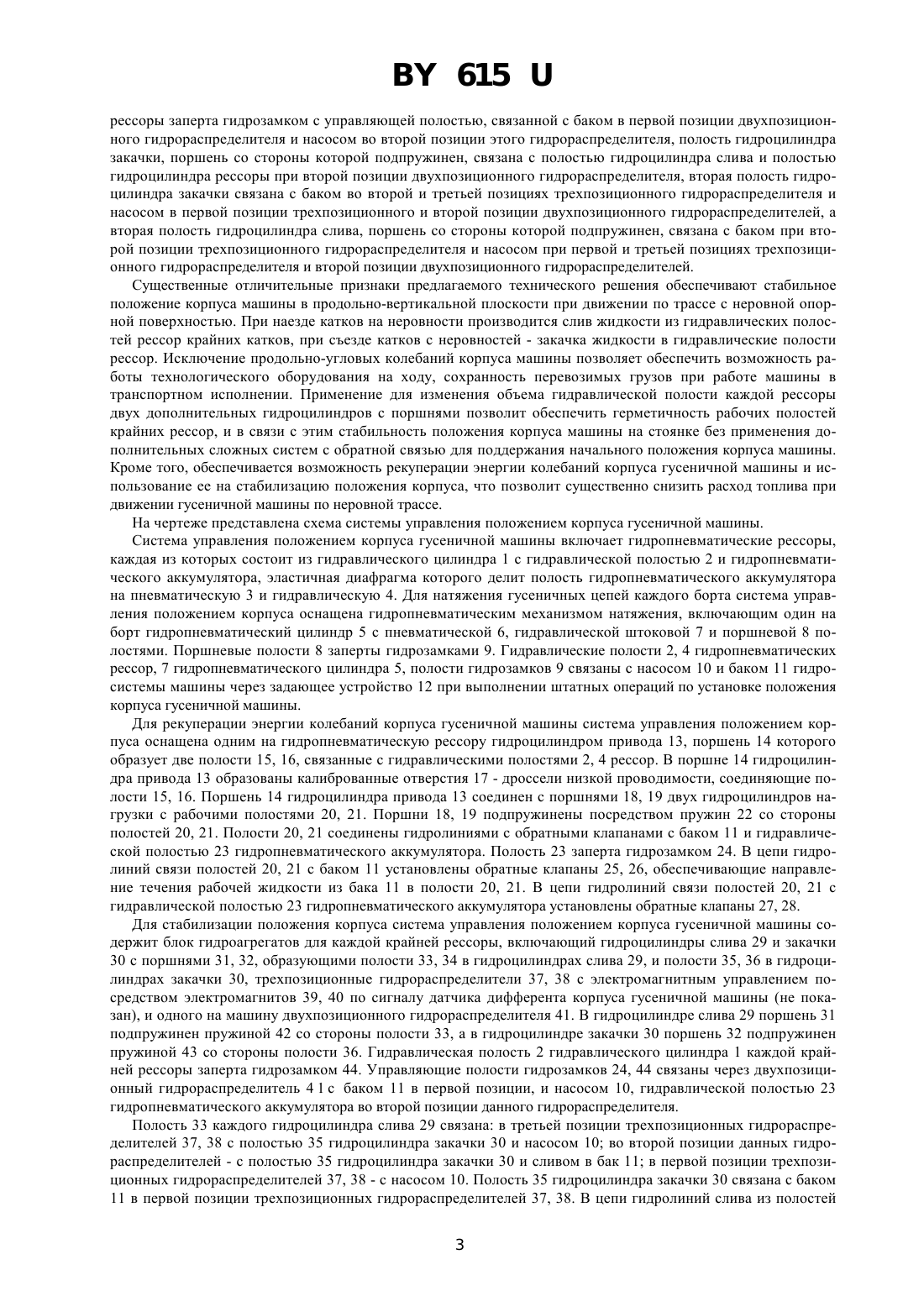
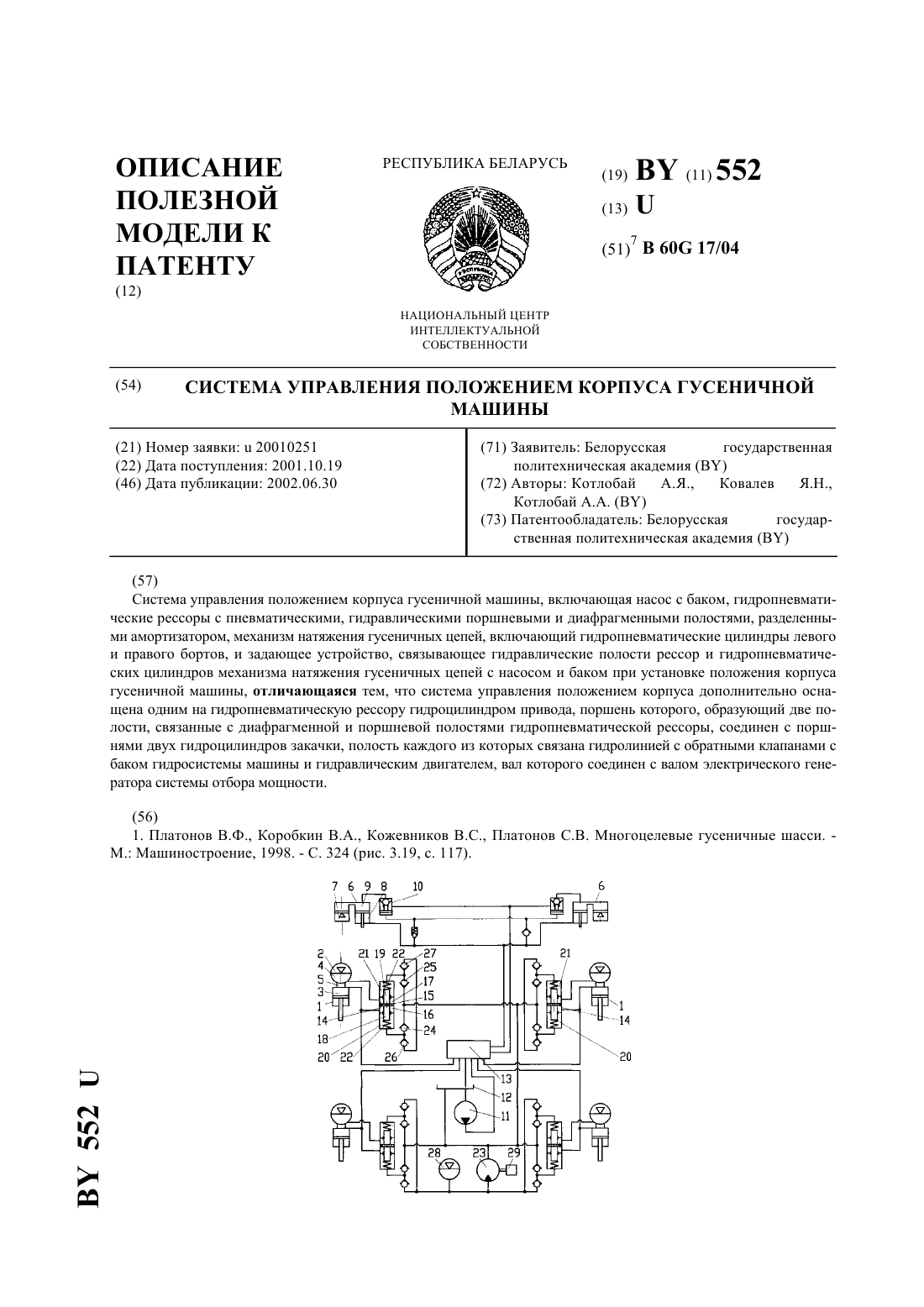
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОРПУСА ГУСЕНИЧНОЙ МАШИНЫ(71) Заявитель Белорусская государственная политехническая академия(73) Патентообладатель Белорусская государственная политехническая академия(57) Система управления положением корпуса гусеничной машины, содержащая насос с баком, гидропневматические рессоры, состоящие из гидравлического цилиндра с гидравлической полостью и гидропневматического аккумулятора, эластичная диафрагма которого делит полость гидропневматического аккумулятора на пневматическую и гидравлическую, механизм натяжения гусеничных цепей, включающий гидропневматические цилиндры левого и правого бортов, и задающее устройство, связывающее гидравлические полости гидравлических цилиндров рессор и гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком при установке положения корпуса гусеничной машины, отличающаяся тем, что система управления положением корпуса дополнительно оснащена гидропневматическим аккумулятором с гидравлической полостью, связанной с напорной магистралью насоса, одним на гидропневматическую рессору гидроцилиндром привода, поршень с калиброванными отверстиями которого, образующий две полости, соединен с поршнями двух гидроцилиндров нагрузки, двумя на каждую крайнюю рессору гидроцилиндрами слива и закачки с поршнями, образующими две полости в каждом из 615 этих гидроцилиндров, одним на две передние и одним на две задние рессоры трехпозиционным гидрораспределителем с электромагнитным управлением по сигналу датчика дифферента корпуса гусеничной машины, и двухпозиционным гидрораспределителем, при этом одна из полостей гидроцилиндра привода связана с полостью гидроцилиндра рессоры, а вторая - с полостью гидропневматического аккумулятора рессоры, полость каждого гидроцилиндра нагрузки связана гидролинией с обратными клапанами с баком гидросистемы машины и гидравлической полостью гидропневматического аккумулятора, полость гидроцилиндра крайней рессоры заперта гидрозамком с управляющей полостью, связанной с баком в первой позиции двухпозиционного гидрораспределителя и насосом во второй позиции этого гидрораспределителя, полость гидроцилиндра закачки, поршень со стороны которой подпружинен, связана с полостью гидроцилиндра слива и полостью гидроцилиндра рессоры при второй позиции двухпозиционного гидрораспределителя, вторая полость, гидроцилиндра закачки связана с баком во второй и третьей позициях трехпозиционного гидрораспределителя и насосом в первой позиции трехпозиционного и второй позиции двухпозиционного гидрораспределителей, а вторая полость гидроцилиндра слива, поршень со стороны которой подпружинен, связана с баком при второй позиции трехпозиционного гидрораспределителя и насосом при первой и третьей позициях трехпозиционного гидрораспределителя и второй позиции двухпозиционного гидрораспределителей. Полезная модель относится к транспортному машиностроению, преимущественно к гусеничным транспортным машинам с гидропневматической подвеской опорных катков. Известна система управления положением корпуса гусеничной машины, содержащая насос с баком, гидропневматические рессоры, состоящие из гидравлического цилиндра с гидравлической полостью и гидропневматического аккумулятора, эластичная диафрагма которого делит полость гидропневматического аккумулятора на пневматическую и гидравлическую, механизм натяжения гусеничных цепей, включающий гидропневматические цилиндры левого и правого бортов, и задающее устройство, связывающее гидравлические полости гидравлических цилиндров рессор и гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком при установке положения корпуса гусеничной машины 1. Гидропневматическая подвеска известной системы управления положением корпуса гусеничной машины обеспечивает высокие показатели плавности хода. Недостатком известной конструкции является то, что она не обеспечивает горизонтального положения корпуса при движении гусеничной машины по неровной трассе. Этот недостаток наиболее существенно проявляется при работе с технологическим оборудованием (например, специальным крановым) на ходу. Кроме того, недостатком известной системы является то, что энергия колебаний, превращаемая амортизаторами в тепло, рассеивается в окружающую среду, а не используется рационально для обеспечения горизонтального положения корпуса гусеничной машины. Экономичность работы технологических машин на гусеничном шасси низкая, велик расход топлива на движение гусеничной машины по неровной трассе. Задачей, решаемой полезной моделью, является обеспечение горизонтального положения корпуса машины при движении, а также снижение расхода топлива на движение гусеничной машины по неровной трассе за счет частичной рекуперации энергии колебаний корпуса. Решение поставленной задачи достигается тем, что в системе управления положением корпуса гусеничной машины, содержащей насос с баком, гидропневматические рессоры состоящие из гидравлического цилиндра с гидравлической полостью и гидропневматического аккумулятора, эластичная диафрагма которого делит полость гидропневматического аккумулятора на пневматическую и гидравлическую, механизм натяжения гусеничных цепей, включающий гидропневматические цилиндры левого и правого бортов, и задающее устройство, связывающее гидравлические полости гидравлических цилиндров рессор и гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком при установке положения корпуса гусеничной машины, система управления положением корпуса дополнительно оснащена гидропневматическим аккумулятором с гидравлической полостью, связанной с напорной магистралью насоса, одним на гидропневматическую рессору гидроцилиндром привода, поршень с калиброванными отверстиями которого, образующий две полости, соединен с поршнями двух гидроцилиндров нагрузки, двумя на каждую крайнюю рессору гидроцилиндрами слива и закачки с поршнями, образующими две полости в каждом из этих гидроцилиндров, одним на две передние и одним на две задние рессоры трехпозиционным гидрораспределителем с электромагнитным управлением по сигналу датчика дифферента корпуса гусеничной машины, и двухпозиционным гидрораспределителем, при этом одна из полостей гидроцилиндра привода связана с полостью гидроцилиндра рессоры, а вторая - с полостью гидропневматического аккумулятора рессоры, полость каждого гидроцилиндра нагрузки связана гидролинией с обратными клапанами с баком гидросистемы машины и гидравлической полостью гидропневматического аккумулятора, полость гидроцилиндра крайней 2 615 рессоры заперта гидрозамком с управляющей полостью, связанной с баком в первой позиции двухпозиционного гидрораспределителя и насосом во второй позиции этого гидрораспределителя, полость гидроцилиндра закачки, поршень со стороны которой подпружинен, связана с полостью гидроцилиндра слива и полостью гидроцилиндра рессоры при второй позиции двухпозиционного гидрораспределителя, вторая полость гидроцилиндра закачки связана с баком во второй и третьей позициях трехпозиционного гидрораспределителя и насосом в первой позиции трехпозиционного и второй позиции двухпозиционного гидрораспределителей, а вторая полость гидроцилиндра слива, поршень со стороны которой подпружинен, связана с баком при второй позиции трехпозиционного гидрораспределителя и насосом при первой и третьей позициях трехпозиционного гидрораспределителя и второй позиции двухпозиционного гидрораспределителей. Существенные отличительные признаки предлагаемого технического решения обеспечивают стабильное положение корпуса машины в продольно-вертикальной плоскости при движении по трассе с неровной опорной поверхностью. При наезде катков на неровности производится слив жидкости из гидравлических полостей рессор крайних катков, при съезде катков с неровностей - закачка жидкости в гидравлические полости рессор. Исключение продольно-угловых колебаний корпуса машины позволяет обеспечить возможность работы технологического оборудования на ходу, сохранность перевозимых грузов при работе машины в транспортном исполнении. Применение для изменения объема гидравлической полости каждой рессоры двух дополнительных гидроцилиндров с поршнями позволит обеспечить герметичность рабочих полостей крайних рессор, и в связи с этим стабильность положения корпуса машины на стоянке без применения дополнительных сложных систем с обратной связью для поддержания начального положения корпуса машины. Кроме того, обеспечивается возможность рекуперации энергии колебаний корпуса гусеничной машины и использование ее на стабилизацию положения корпуса, что позволит существенно снизить расход топлива при движении гусеничной машины по неровной трассе. На чертеже представлена схема системы управления положением корпуса гусеничной машины. Система управления положением корпуса гусеничной машины включает гидропневматические рессоры,каждая из которых состоит из гидравлического цилиндра 1 с гидравлической полостью 2 и гидропневматического аккумулятора, эластичная диафрагма которого делит полость гидропневматического аккумулятора на пневматическую 3 и гидравлическую 4. Для натяжения гусеничных цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 5 с пневматической 6, гидравлической штоковой 7 и поршневой 8 полостями. Поршневые полости 8 заперты гидрозамками 9. Гидравлические полости 2, 4 гидропневматических рессор, 7 гидропневматического цилиндра 5, полости гидрозамков 9 связаны с насосом 10 и баком 11 гидросистемы машины через задающее устройство 12 при выполнении штатных операций по установке положения корпуса гусеничной машины. Для рекуперации энергии колебаний корпуса гусеничной машины система управления положением корпуса оснащена одним на гидропневматическую рессору гидроцилиндром привода 13, поршень 14 которого образует две полости 15, 16, связанные с гидравлическими полостями 2, 4 рессор. В поршне 14 гидроцилиндра привода 13 образованы калиброванные отверстия 17 - дроссели низкой проводимости, соединяющие полости 15, 16. Поршень 14 гидроцилиндра привода 13 соединен с поршнями 18, 19 двух гидроцилиндров нагрузки с рабочими полостями 20, 21. Поршни 18, 19 подпружинены посредством пружин 22 со стороны полостей 20, 21. Полости 20, 21 соединены гидролиниями с обратными клапанами с баком 11 и гидравлической полостью 23 гидропневматического аккумулятора. Полость 23 заперта гидрозамком 24. В цепи гидролиний связи полостей 20, 21 с баком 11 установлены обратные клапаны 25, 26, обеспечивающие направление течения рабочей жидкости из бака 11 в полости 20, 21. В цепи гидролиний связи полостей 20, 21 с гидравлической полостью 23 гидропневматического аккумулятора установлены обратные клапаны 27, 28. Для стабилизации положения корпуса система управления положением корпуса гусеничной машины содержит блок гидроагрегатов для каждой крайней рессоры, включающий гидроцилиндры слива 29 и закачки 30 с поршнями 31, 32, образующими полости 33, 34 в гидроцилиндрах слива 29, и полости 35, 36 в гидроцилиндрах закачки 30, трехпозиционные гидрораспределители 37, 38 с электромагнитным управлением посредством электромагнитов 39, 40 по сигналу датчика дифферента корпуса гусеничной машины (не показан), и одного на машину двухпозиционного гидрораспределителя 41. В гидроцилиндре слива 29 поршень 31 подпружинен пружиной 42 со стороны полости 33, а в гидроцилиндре закачки 30 поршень 32 подпружинен пружиной 43 со стороны полости 36. Гидравлическая полость 2 гидравлического цилиндра 1 каждой крайней рессоры заперта гидрозамком 44. Управляющие полости гидрозамков 24, 44 связаны через двухпозиционный гидрораспределитель 4 1 с баком 11 в первой позиции, и насосом 10, гидравлической полостью 23 гидропневматического аккумулятора во второй позиции данного гидрораспределителя. Полость 33 каждого гидроцилиндра слива 29 связана в третьей позиции трехпозиционных гидрораспределителей 37, 38 с полостью 35 гидроцилиндра закачки 30 и насосом 10 во второй позиции данных гидрораспределителей - с полостью 35 гидроцилиндра закачки 30 и сливом в бак 11 в первой позиции трехпозиционных гидрораспределителей 37, 38 - с насосом 10. Полость 35 гидроцилиндра закачки 30 связана с баком 11 в первой позиции трехпозиционных гидрораспределителей 37, 38. В цепи гидролиний слива из полостей 3 61533, 35 установлены нагрузочные дроссели 45. Полость 34 каждого гидроцилиндра слива 29 связана с полостью 36 гидроцилиндра закачки 30 и при второй позиции двухпозиционного гидрораспределителя 41 и включенном насосе 10 с гидравлической полостью 2 гидравлического цилиндра 1 каждой крайней гидропневматической рессоры. В напорной магистрали насоса 10 установлен предохранительный клапан 46. Система управления положением корпуса гусеничной машины работает следующим образом. Установка корпуса 1 гусеничной машины в положение Номинальный дорожный просвет производится при стоянке машины на ровной площадке. Включается насос 10 и задающее устройство 12 обеспечивает связь полостей 2 гидроцилиндров 1 гидропневматических рессор, полостей 7, 8 гидроцилиндров 5 с насосом 10 и сливом в бак 11 согласно штатному алгоритму. При подъеме корпуса гусеничной машины жидкость от насоса 10 через задающее устройство 12 поступает в гидравлические полости 2 гидравлических цилиндров 1 гидропневматических рессор, из полостей 2 жидкость поступает в полости 16 гидравлических цилиндров привода 13, а из полостей 16, через калиброванные отверстия 17 в полости 15, и далее в гидравлические полости 4 гидропневматических аккумуляторов рессор. При опускании корпуса гусеничной машины жидкость из полостей 4 поступает в полости 15, и через калиброванные отверстия 17 в полости 16. Далее жидкость из полостей 2 гидроцилиндров 1 рессор поступает через задающее устройство 12 на слив в бак 11. Пружины 22 обеспечивают среднее положение поршней 14. Одновременно при включении насоса 10 подается напряжение на катушку электромагнита двухпозиционного гидрораспределителя 41 и его золотник переводится во вторую позицию. Открываются гидрозамки 24, 44. Подается напряжение на катушки электромагнитов 39 трехпозиционных гидрораспределителей 37, 38 и золотники этих гидрораспределителей переводятся в первую позицию. Полости 33 гидроцилиндров слива 29 соединяются с напорной магистралью насоса 10 и поршни 31 под действием пружин 42 занимают исходное положение (объем полостей 34 минимальный). Полости 35 гидроцилиндров закачки 30 соединяются со сливом в бак 11 и поршни 32 занимают исходное положение (объем полостей 35 минимальный). Жидкость от насоса 10 поступает также через двухпозиционный гидрораспределитель 41, открытый гидрозамок 24 в гидравлическую полость 23 гидропневматического аккумулятора и частично заполняет ее в соответствии с зарядным давлением пневматической камеры. После выполнения операций по установке корпуса 1 машины в положение Номинальный дорожный просвет выключается привод насоса 10, обесточиваются катушки электромагнитов двухпозиционного гидрораспределителя 41 и 39. Золотник двухпозиционного гидрораспределителя 41 возвращается в первую позицию, а трехпозиционных гидрораспределителей 37, 38 - во вторую. Гидрозамки 24, 44 закрываются, полости 33, 35 соединяются со сливом в бак 11, полость 23 запирается гидрозамком 24. Полости 2 запираются гидроагрегатами задающего устройства 12. При работе подвески в пассивном режиме при наезде опорного катка (не показан) на неровность поршень гидроцилиндра 1 вытесняет жидкость из полости 2 в полость 16 гидроцилиндра привода 13. Поршень 14 начинает перемещаться, вытесняя жидкость из полости 15 в полость 4, сжимая газ полости 3 и обеспечивая упругую характеристику гидропневматической рессоры. Часть жидкости из полости 16 поступает в полость 15 через калиброванное отверстие 17, выполняющее роль амортизатора. При съезде опорного катка с неровности жидкость из полости 4 под действием потенциала сжатого газа полости 3 поступает в полость 15, поршень 14 перемещается и жидкость из полости 16 вытесняется в полость 2 гидроцилиндра 1 рессоры. Аналогично часть жидкости поступает из полости 15 в полость 16 через калиброванные отверстия 17, выполняющие роль амортизатора. При перемещении поршней 18, 19 изменяются объемы полостей 20, 21. При выходе поршня 18 из полости 20,объем ее увеличивается. Одновременно поршень 19 входит в полость 21, уменьшая ее объем. Открывается обратный клапан 25 и жидкость из бака 11 поступает в полость 20. Одновременно, при уменьшении объема полости 21, обратный клапан 26 закрывается, а обратный клапан 28 открывается, и порция жидкости поступает в гидравлическую полость 23 гидропневматического аккумулятора. При входе поршня 18 в полость 20 и выходе поршня 19 из полости 21 объем полости 20 уменьшается, а полости 21 увеличивается. Открывается обратный клапан 27 и порция жидкости поступает в гидравлическую полость 23 гидропневматического аккумулятора. Одновременно открывается обратный клапан 26 и порция жидкости из бака 11 поступает в полость 21. Таким образом, жидкость закачивается в полость 23 гидропневматического аккумулятора из бака 11. По мере увеличения давления в полости 23 и увеличения противодавления в полостях 20, 21 поршни 14 останавливаются,соответственно корректируются характеристики гидропневматической подвески. При работе подвески в активном режиме включается насос 10, подается напряжение на катушку электромагнитов двухпозиционного гидрораспределителя 41 и его золотник переводится во вторую позицию. Открываются гидрозамки 24, 44. Следует иметь в виду, что наиболее интенсивными колебаниями гусеничной машины являются продольно-угловые, совершаемые корпусом гусеничной машины с относительно низкой частотой и высокой амплитудой. Амплитуды вертикальных и поперечно-угловых колебаний корпуса гусеничной машины 4 615 относительно невелики, и современная гидропневматическая подвеска позволяет снизить воздействие этих колебаний до допустимого уровня при работе в пассивном режиме. Сигналом для работы системы стабилизации положения корпуса является превышение амплитуды продольно-угловых колебаний корпуса некоторого допустимого значения, регистрируемого датчиком (не показан) дифферента корпуса гусеничной машины. При наезде передних опорных катков на неровность, передняя часть корпуса начинает подниматься. При достижении угла наклона корпуса назад некоторого установочного значения, датчик дифферента корпуса срабатывает и подает сигнал на блок управления (не показан). Блок управления подает команду, при которой катушки электромагнитов 39, 40 трехпозиционного гидрораспределителя 37 обесточены, золотник его находится во второй позиции, и подается напряжение на катушку электромагнита 40 трехпозиционного гидрораспределителя 38, золотник которого переводится в третью позицию. Полости 33, 35 гидроцилиндров 29,30 передних рессор через трехпозиционный гидрораспределитель 37 соединяются со сливом в бак 11, а полости 33, 35 гидроцилиндров 29, 30 задних рессор через трехпозиционный гидрораспределитель 38 соединяются с насосом 10 и гидравлической полостью 23 гидропневматического аккумулятора. Жидкость из полостей 2 гидроцилиндров 1 передних рессор поступает в полости 34 гидроцилиндров слива 29, поршни 31 перемещаются, занимая промежуточное положение, и жидкость из полостей 33 поступает на слив в бак 11. Одновременно жидкость от насоса 10 и из полости 23 гидропневматического аккумулятора поступает в полости 33, 35 гидроцилиндров 29, 30 задних рессор, поршни 31, 32 этих гидроцилиндров перемещаются, занимая промежуточное положение, и жидкость из полостей 36 поступает в полости 2 гидроцилиндров 1 задних рессор. Нагрузочные дроссели 45 выравнивают расходы жидкости по магистралям слива и закачки. Давление жидкости в полости 23 гидропневматического аккумулятора существенно превышает давление в полостях 2 гидроцилиндров 1 гидропневматических рессор из-за разности площадей поршней 14, 18, 19,что позволяет эффективно использовать данный потенциал при подъеме корпуса гусеничной машины. Гидропневматический аккумулятор аккумулирует энергию колебаний корпуса гусеничной машины, превращаемую амортизаторами в тепло и использует эту энергию для стабилизации положения корпуса. Наличие гидропневматического аккумулятора, заряжаемого всеми рессорами, обеспечивает возможность использования в системе управления положением корпуса насоса 10 с низкой производительностью, определяемой энергетическими параметрами режимов по установке положения корпуса гусеничной машины на стоянке. Фактически насос 10 работает в режиме подкачки полости 23 гидропневматического аккумулятора. Обратный клапан 46 защищает насос 10 от противодавления, периодически возникающего в полости 23 гидропневматического аккумулятора. При наличии противодавления насос 10 работает на слив в бак 11 через предохранительный клапан задающего устройства 12. При сливе необходимого объема рабочей жидкости из полостей 2 гидроцилиндров 1 передних рессор и закачке жидкости в полости 2 задних рессор корпус машины выравнивается. При работе подвески в активном режиме пневматические полости 3 гидропневматических аккумуляторов рессор выполняют свою основную функцию, обеспечивая снижение динамической нагруженности агрегатов гусеничной машины и основного технологического оборудования. При съезде передних опорных катков с неровностей нос машины начинает опускаться, а корма подниматься. При достижении угла наклона корпуса вперед установочного значения датчик дифферента корпуса гусеничной машины срабатывает и подает сигнал на блок управления (не показаны). Блок управления подает команду, при которой включаются электромагнит 40 трехпозиционного гидрораспределителя 37 передних рессор, и обесточивается электромагнит 40 трехпозиционного гидрораспределителя 38 задних рессор. Золотник трехпозиционного гидрораспределителя 37 передних рессор переводятся в третью позицию, а трехпозиционного гидрораспределителя 38 задних рессор возвращается во вторую. При положении золотника трехпозиционного гидрораспределителя 37 в третьей позиции рабочая жидкость из полости 23 гидропневматического аккумулятора и от насоса 10 поступает в полости 33 и 35 гидроцилиндров слива 29 и закачки 30 передних рессор, поршни 31, 32 перемещаются и жидкость из полостей 34, 36 поступает в полости 2 гидроцилиндров 1 передних рессор 2. Одновременно при второй позиции трехпозиционного гидрораспределителя 38 жидкость из полостей 2 гидроцилиндров 1 задних рессор поступает в полости 34, 36 гидроцилиндров слива 29 и закачки 30, а из полостей 33, 35 этих гидроцилиндров на слив в бак 11. При закачке необходимого объема рабочей жидкости в полости 2 гидроцилиндров 1 передних рессор и сливе аналогичных объемов из полостей 2 гидроцилиндров 1 задних рессор корпус гусеничной машины выравнивается. Таким образом, при движении гусеничной машины по неровной трассе обеспечивается стабильное положение корпуса гусеничной машины за счет принудительного изменения объемов гидравлических полостей крайних рессор по сигналу датчика дифферента корпуса гусеничной машины. Стабилизация положения корпуса гусеничной машины достигается за счет рекуперации энергии колебаний, превращаемой амортизаторами рессор в тепло и рассеиваемой в атмосферу. При выключении активного режима работы подвески включают электромагниты 39 трехпозиционных гидрораспределителей 37, 38. Золотники этих гидрораспределителей переводятся в первую позицию. Жидкость из полости 23 гидропневматического аккумулятора и от насоса 10 поступает в полости 33 гидроцилиндров слива 29 и сливается из полостей 35 гидроцилиндров закачки 30. Поршни 31, 32 под действием перепа 5 615 да давлений и пружин 42, 43 занимают исходное положение. Далее золотник двухпозиционного гидрораспределителя 41 возвращается в первую позицию, гидрозамки 24, 44 запираются, насос 10 выключается,обесточиваются электромагниты 39 и золотники трехпозиционных гидрораспределителей 37, 38 возвращаются во вторую позицию, соединяя полости 33, 35 со сливом в бак 11. Подвеска начинает работать в пассивном режиме. Таким образом, предложенное техническое решение обеспечивает при движении гусеничной машины по трассе с неровной опорной поверхностью стабильное положение корпуса гусеничной машины, исключает продольно-угловые колебания его. Это в свою очередь позволяет обеспечить работу технологического оборудования при движении машины, сохранность перевозимых грузов при работе машины в транспортном исполнении. Использование в качестве энергетического потенциала стабилизации положения корпуса рекуперированной энергии колебаний позволит существенно сократить затраты мощности энергетической установки гусеничной машины на привод механизмов системы управления положением корпуса, и соответственно снизить расход топлива при движении гусеничной машины по неровной трассе. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: B60G 17/04
Метки: система, управления, корпуса, положением, гусеничной, машины
Код ссылки
<a href="https://by.patents.su/6-u615-sistema-upravleniya-polozheniem-korpusa-gusenichnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Система управления положением корпуса гусеничной машины</a>
Система управления положением корпуса гусеничной машины
Номер патента: U 552
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Ковалев Ярослав Никитич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: положением, гусеничной, корпуса, система, машины, управления
Текст:
...цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 6 с пневматической 7, гидравлической штоковой 8 и поршневой 9 полостями. Поршневые полости 9 заперты гидрозамками 10. Гидравлические полости 3, 4 гидропневматических рессор 1, 8 гидропневматического цилиндра 6, напорные полости гидрозамков 10 связаны с насосом 11 и баком 12...
Система управления положением корпуса гусеничной машины
Номер патента: U 551
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: управления, положением, корпуса, машины, система, гусеничной
Текст:
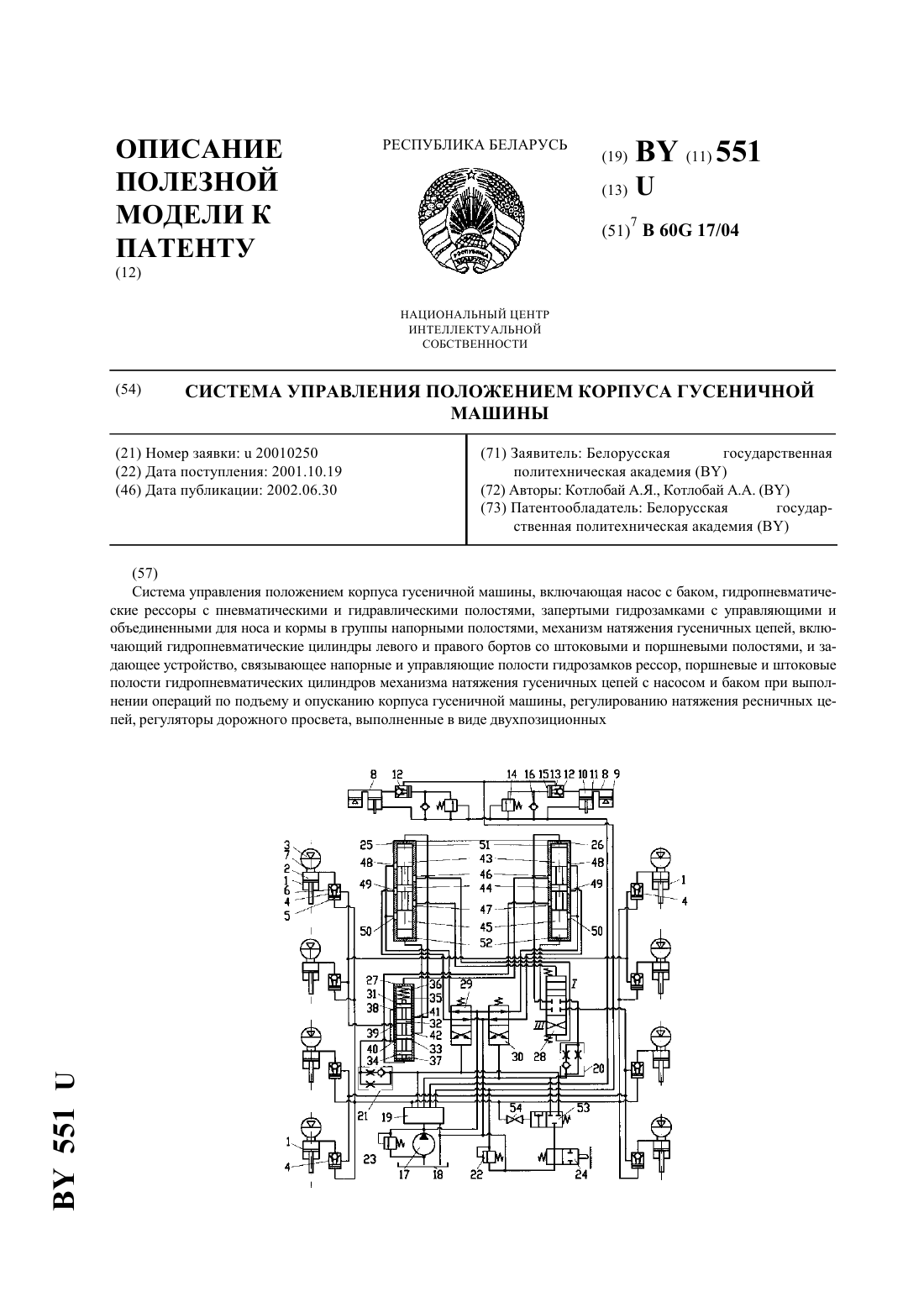
...к гидрозамкам 4 рессор 1 передней группы, открывает их и поступает в полости 2. После достижения плунжером гидроцилиндра дозирования 25 крайнего положения (на чертеже нижнего) жидкость от насоса 17 через двухпозиционный гидрораспределитель переключения 29 (во второй позиции его), каналы 49, 46 гидроцилиндра дозирования 25 поступает в торцевую управляющую полость (на чертеже нижнюю) гидрораспределителя управления 28. Вторая торцевая...
Система управления положением корпуса гусеничной машины
Номер патента: U 468
Опубликовано: 30.03.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: корпуса, положением, машины, гусеничной, система, управления
Текст:
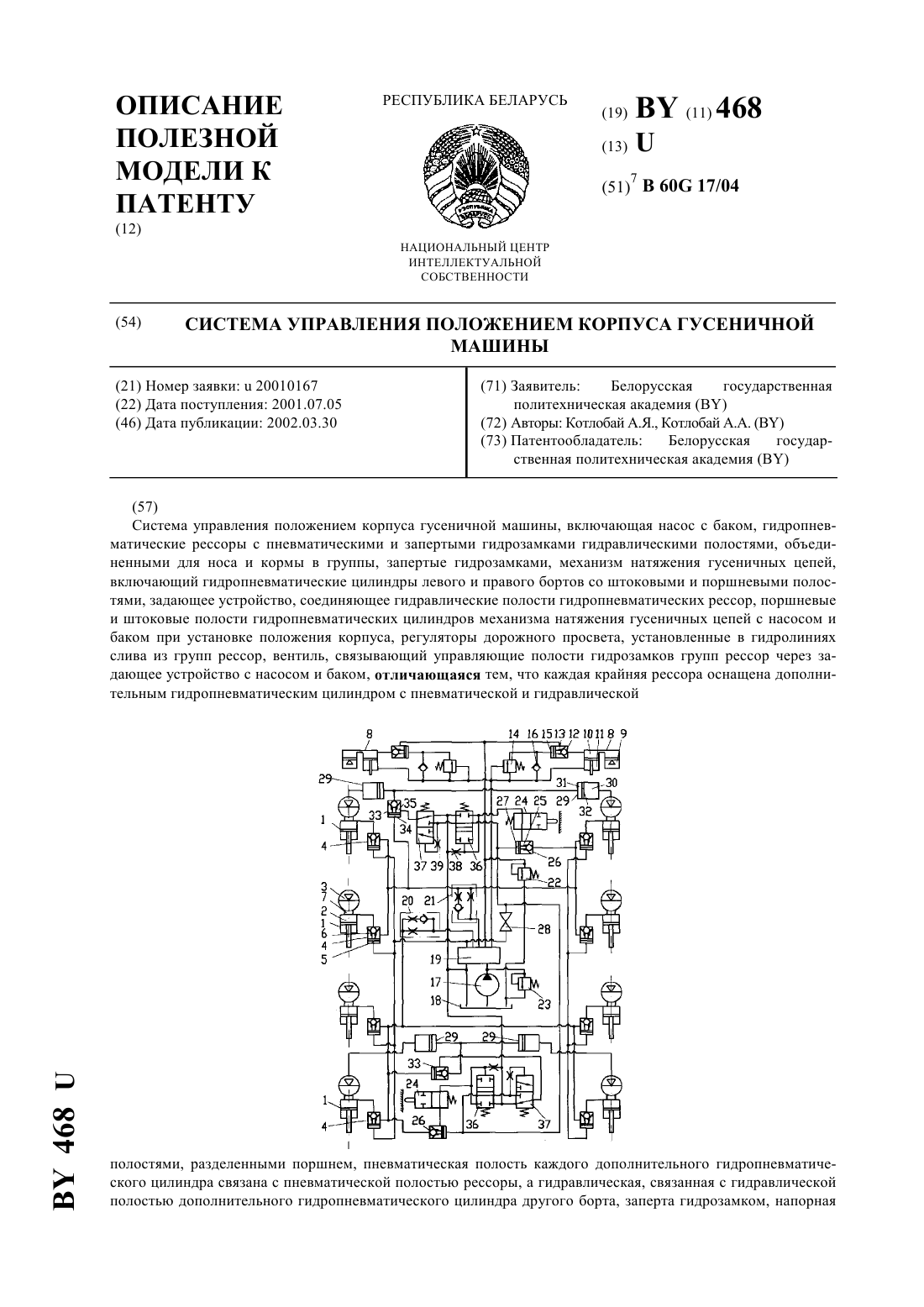
...предохранительные клапаны 14 связаны с управляющими полостями 15 гидрозамков 12. Параллельно предохранительным клапанам 14 установлены обратные клапаны 16, обеспечивающие слив жидкости из управляющих полостей 15 в штоковые полости 11 гидропневматических цилиндров 8. Для выполнения штатных операций по изменению положения корпуса гусеничной машины, установке его в положение Номинальный дорожный просвет, регулирования натяжения гусеничной цепи...
Система управления положением корпуса гусеничной машины
Номер патента: U 467
Опубликовано: 30.03.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: положением, машины, гусеничной, корпуса, управления, система
Текст:
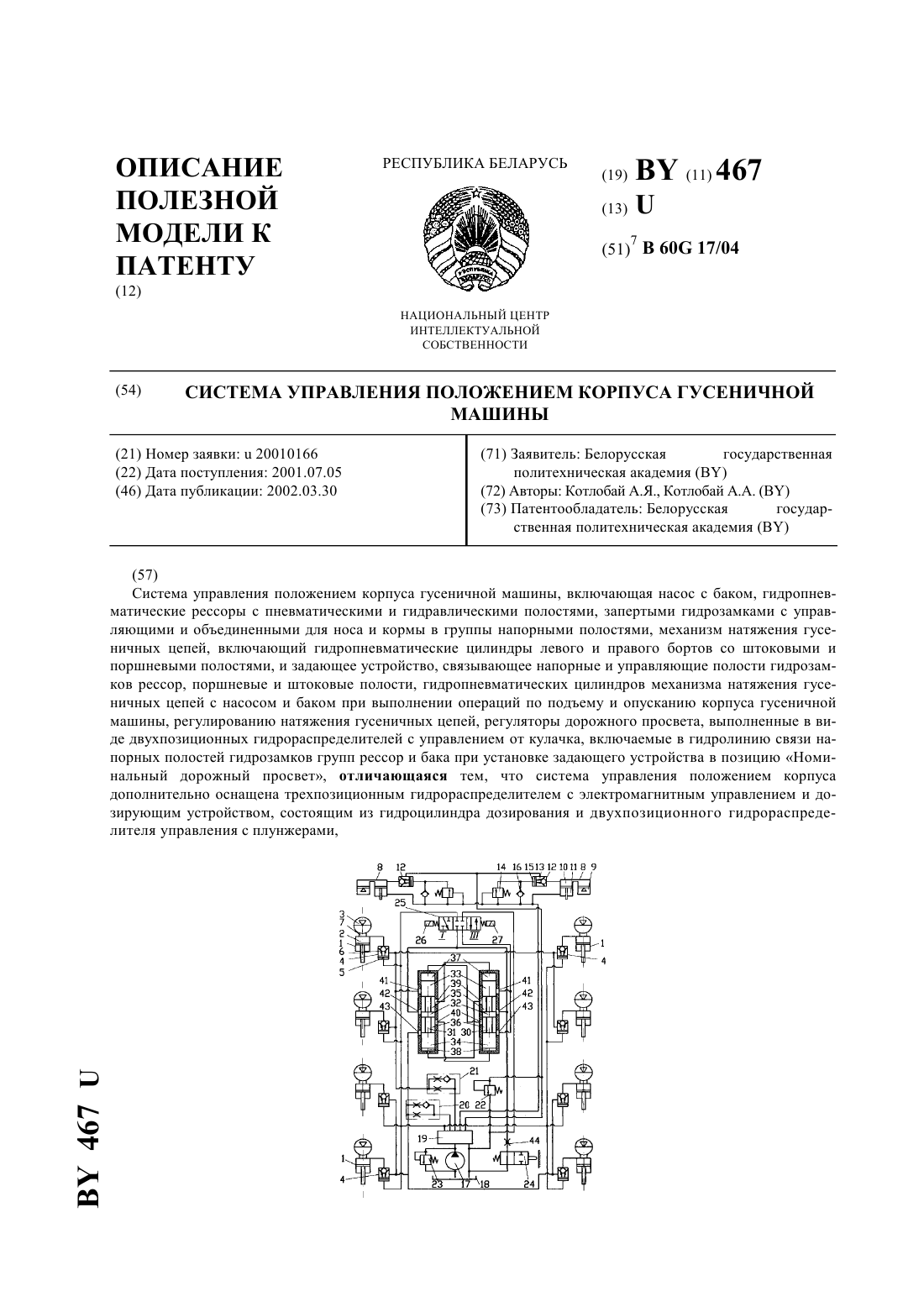
...дозирования объемов рабочей жидкости, закачиваемой в гидравлические полости 2 рессор 1, система управления положением корпуса гусеничной машины дополнительно оснащена трехпозиционным гидрораспределителем 25 с электромагнитным управлением посредством электромагнитов 26, 27 и дозирующим устройством, конструктивная схема которого позволяет работу в режимах сумматора и делителя потоков. Дозирующее устройство состоит из одинаковых по конструктивной...
Cистема управления положением корпуса гусеничной машины
Номер патента: U 478
Опубликовано: 30.03.2002
Авторы: Луцков Борис Александрович, Котлобай Анатолий Яковлевич, Китченко Владимир Николаевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: положением, управления, машины, cистема, гусеничной, корпуса
Текст:
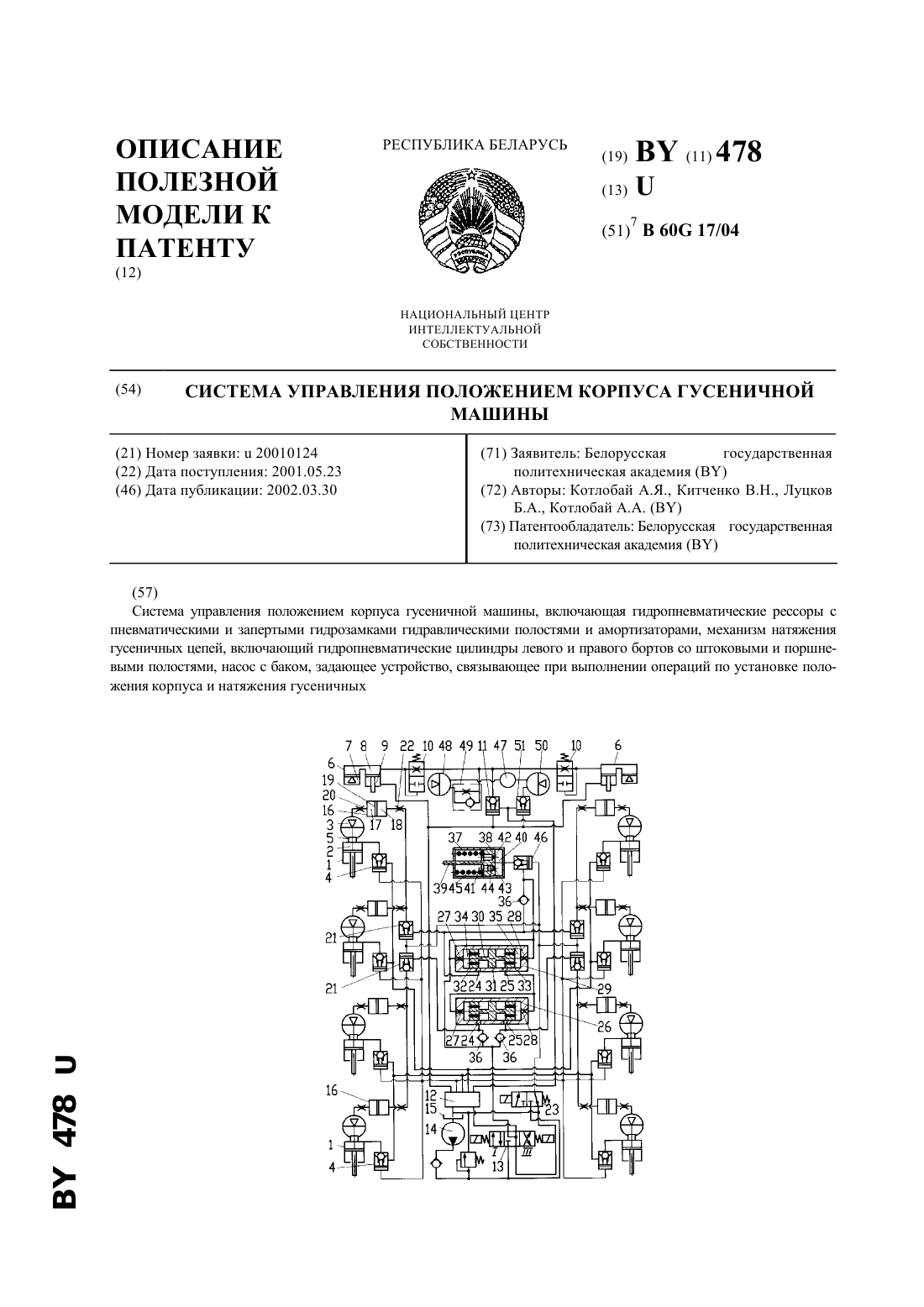
...положения корпуса гусеничной машины, ус 3 478 тановке его в положение Номинальный дорожный просвет, регулирования натяжения гусеничной цепи система управления положением корпуса гусеничной машины включает задающее устройство 12 и трехпозиционный гидрораспределитель 13 с электромагнитным управлением, связывающие управляющие полости гидрозамков 4, 11, гидравлические полости 2 рессор 1, и 8, 9 гидропневматических цилиндров 6 с насосом 14 и...
Предыдущий патент: Установка заливочная смесительно-дозирующая (два варианта)
Следующий патент: Высевающий аппарат
Случайный патент: Способ определения америция - 241 в почве