Синусоэксцентриковая передача для привода гибких связей


Текст
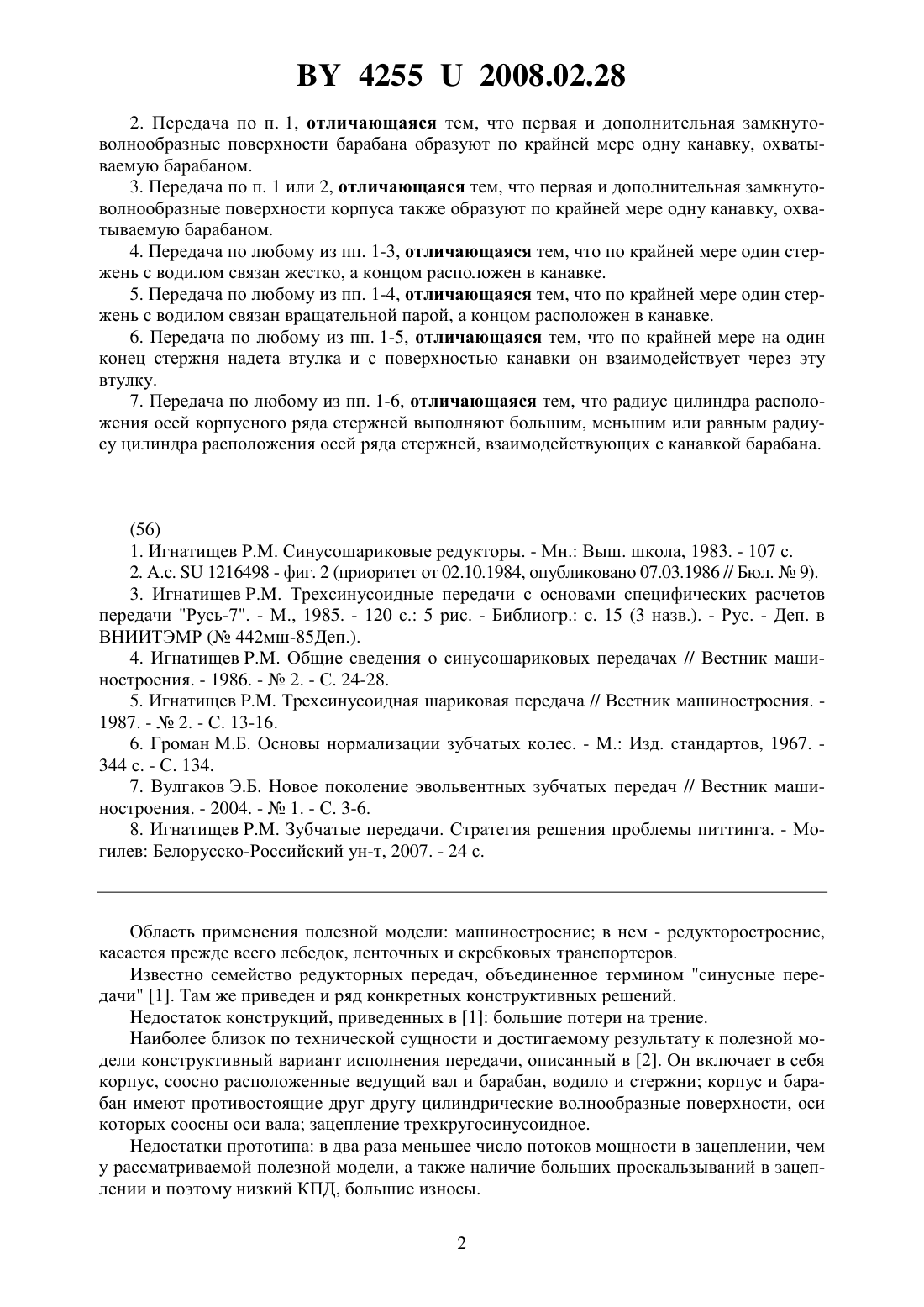
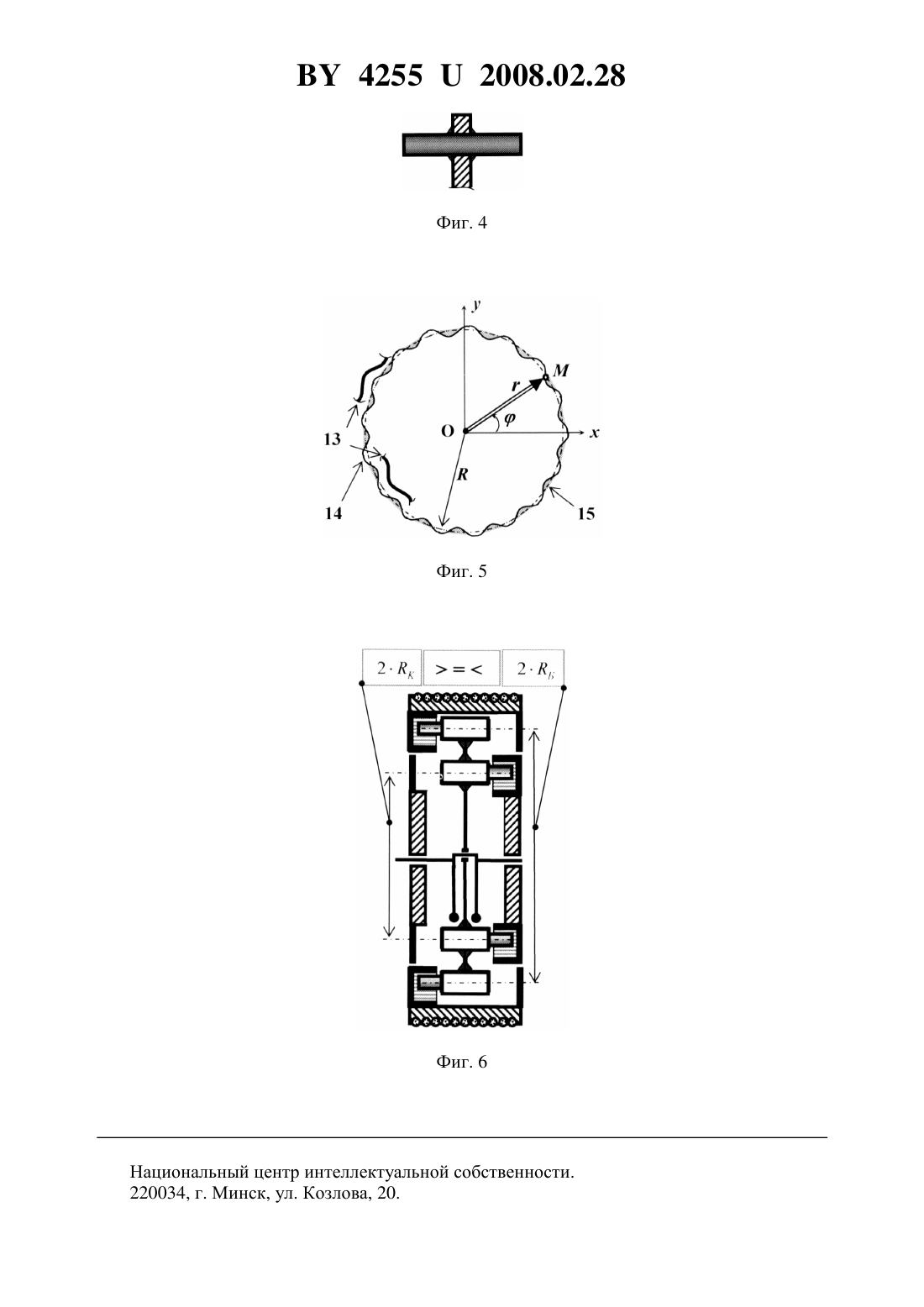
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИНУСОЭКСЦЕНТРИКОВАЯ ПЕРЕДАЧА ДЛЯ ПРИВОДА ГИБКИХ СВЯЗЕЙ(71) Заявитель Игнатищев Руслан Михайлович(72) Автор Игнатищев Руслан Михайлович(73) Патентообладатель Игнатищев Руслан Михайлович(57) 1. Синусоэксцентриковая передача для привода гибких связей, включающая корпус,вал, водило, ряд стержней и соосно расположенный с валом барабан, стержни охватываются барабаном, взаимодействующие со стержнями поверхности корпуса и барабана замкнуто-волнообразные и выполнены удовлетворяющими условиям трехкругосинусоидного зацепления, отличающаяся тем, что содержит дополнительный ряд стержней, барабан содержит дополнительную замкнуто-волнообразную поверхность, эквидистантную и внутренне расположенную к первой, корпус также содержит дополнительную замкнутоволнообразную поверхность, эквидистантно, но внешне расположенную к первой, водило через эксцентрик соединено с валом вращательной парой. 42552008.02.28 2. Передача по п. 1, отличающаяся тем, что первая и дополнительная замкнутоволнообразные поверхности барабана образуют по крайней мере одну канавку, охватываемую барабаном. 3. Передача по п. 1 или 2, отличающаяся тем, что первая и дополнительная замкнутоволнообразные поверхности корпуса также образуют по крайней мере одну канавку, охватываемую барабаном. 4. Передача по любому из пп. 1-3, отличающаяся тем, что по крайней мере один стержень с водилом связан жестко, а концом расположен в канавке. 5. Передача по любому из пп. 1-4, отличающаяся тем, что по крайней мере один стержень с водилом связан вращательной парой, а концом расположен в канавке. 6. Передача по любому из пп. 1-5, отличающаяся тем, что по крайней мере на один конец стержня надета втулка и с поверхностью канавки он взаимодействует через эту втулку. 7. Передача по любому из пп. 1-6, отличающаяся тем, что радиус цилиндра расположения осей корпусного ряда стержней выполняют большим, меньшим или равным радиусу цилиндра расположения осей ряда стержней, взаимодействующих с канавкой барабана.(56) 1. Игнатищев Синусошариковые редукторы. - Мн. Выш. школа, 1983. - 107 с. 2. А.с.1216498 - фиг. 2 (приоритет от 02.10.1984, опубликовано 07.03.1986 // Бюл.9). 3. Игнатищев Трехсинусоидные передачи с основами специфических расчетов передачи Русь-7. - М., 1985. - 120 с. 5 рис. - Библиогр. с. 15 (3 назв.). - Рус. - Деп. в ВНИИТЭМР ( 442 мш-85 Деп.). 4. Игнатищев Общие сведения о синусошариковых передачах // Вестник машиностроения. - 1986. -2. - С. 24-28. 5. Игнатищев Трехсинусоидная шариковая передача // Вестник машиностроения. 1987. -2. - С. 13-16. 6. Громан М.Б. Основы нормализации зубчатых колес. - М. Изд. стандартов, 1967. 344 с. - С. 134. 7. Вулгаков Э.Б. Новое поколение эвольвентных зубчатых передач // Вестник машиностроения. - 2004. -1. - С. 3-6. 8. Игнатищев Зубчатые передачи. Стратегия решения проблемы питтинга. - Могилев Белорусско-Российский ун-т, 2007. - 24 с. Область применения полезной модели машиностроение в нем - редукторостроение,касается прежде всего лебедок, ленточных и скребковых транспортеров. Известно семейство редукторных передач, объединенное термином синусные передачи 1. Там же приведен и ряд конкретных конструктивных решений. Недостаток конструкций, приведенных в 1 большие потери на трение. Наиболее близок по технической сущности и достигаемому результату к полезной модели конструктивный вариант исполнения передачи, описанный в 2. Он включает в себя корпус, соосно расположенные ведущий вал и барабан, водило и стержни корпус и барабан имеют противостоящие друг другу цилиндрические волнообразные поверхности, оси которых соосны оси вала зацепление трехкругосинусоидное. Недостатки прототипа в два раза меньшее число потоков мощности в зацеплении, чем у рассматриваемой полезной модели, а также наличие больших проскальзываний в зацеплении и поэтому низкий КПД, большие износы. 2 42552008.02.28 Задачи, решаемые использованием полезной модели увеличение несущей способности передачи путем увеличения числа потоков мощности в зацеплении, а также существенное уменьшение проскальзываний в зацеплении и увеличение поэтому КПД, уменьшение износов. Решение указанных задач обеспечивается тем, что синусоэксцентриковая передача для привода гибких связей, включающая корпус, вал, водило, ряд стержней и соосно расположенный с валом барабан стержни охватываются барабаном взаимодействующие со стержнями поверхности корпуса и барабана замкнуто-волнообразные и выполнены удовлетворяющими условиям трехкругосинусоидного зацепления, согласно полезной модели,содержит дополнительный ряд стержней, барабан содержит дополнительную замкнутоволнообразную поверхность, эквидистантную и внутренне расположенную к первой, корпус также содержит дополнительную замкнуто-волнообразную поверхность, эквидистантно,но внешне расположенную к первой, водило через эксцентрик соединено с валом вращательной парой. Первая и дополнительная замкнуто-волнообразные поверхности барабана образуют по крайней мере одну канавку, охватываемую барабаном первая и дополнительная замкнуто-волнообразные поверхности корпуса также образуют по крайней мере одну канавку, охватываемую барабаном. Варианты по крайней мере один стержень с водилом связан жестко, а концом расположен в канавке по крайней мере один стержень с водилом связан вращательной парой, а концом расположен в канавке по крайней мере на один конец стержня надета втулка и с поверхностью канавки он взаимодействует через эту втулку радиус цилиндра расположения осей корпусного ряда стержней выполняют большим, меньшим или равным радиусу цилиндра расположения осей ряда стержней,взаимодействующих с канавкой барабана. Сущность полезной модели пояснена приложенными фигурами фиг. 1 - главный вид синусоэксцентриковой передачи для привода гибких связей фиг. 2 - вид вдоль оси вращения на водило фиг. 3 - вариант в зацеплении втулка фиг. 4 - вариант в зацеплении неподвижный относительно водила стержень фиг. 5 - изображения к пояснению математической модели передачи фиг. 6 - одностороннее зацепление. Синусоэксцентриковая передача для привода гибких связей, представленная на фиг. 1-6,содержит 1 - корпус, 2 - ведущий вал с эксцентриком 3 проекции на плоскость, перпендикулярную оси вращения, оси эксцентрика (точка С) и оси вращения вала (точка О) отображены на фиг. 2 4 - водило 5 - корпусные кольца с выполненными на них синусоидальными(замкнуто-волновыми) канавками 6 - ведомые кольца с выполненными на них синусоидальными канавками 7 - барабан (привод гибкой связи - канатный барабан для лебедки,или барабан для ленточного транспортера, или звездочка для скребкового транспортера и т.п.) 8 - круглые стержни, с зазором расположенные во втулках 9 водила барабана либо во втулках 10 корпуса 11 - противовесы 12 - диск водила 4, в котором неподвижно закреплены втулки 9 и 10 в основном варианте исполнения либо закреплены стержни в вариантах по фиг. 3 и фиг. 4. Замкнуто-волновые (в соответствии с вошедшей в научно-техническую литературу терминологии - синусоидальные) канавки могут формироваться способом нарезания на вертикально-фрезерных станках с числовым программным управлением. 13 края синусоидальной канавки - как визуально видимые линии пересечения кольцевой поверхности с поверхностью канавки. 14 - кругосинусоида (М - текущая ее точка) - это траектория точки пересечения вертикально расположенной оси вращающейся фрезы с горизонтальной плоскостью при нарезании канавки на вертикально-фрезерном станке с ЧПУ(она же - траектория точки пересечения оси ММ стержня, см. фиг. 3, с плоскостью, перпендикулярной оси вала при работе передачи). 15 - ось (окружность) кругосинусоиды, О ее центр,- радиус. Оху - связанная с горизонтальной плоскостью стола станка система координат,- радиус-вектор и- полярный угол, определяющие положение текущей точки М А - амплитуда кругосинусоиды. Условие существования передачи эксцентриситет равен амплитуде кругосинусоиды, т.е. АОС. 3 42552008.02.28 Канавки выполняют по уравнениям 15 вариант один штрих 2121 ,1 вариант два штриха 2121 ,1 где- число волн (периодов) канавки- максимально возможное число концов стержней, которые можно в ней разместить для корпуса - ,идля барабана - Б, Б и Б. Возможны четыре кинематических варианта исполнения передачи 1 и ББ 1 1 и ББ 1. Синусоэксцентриковая передача для привода гибких связей работает следующим образом. Вращающийся со скоростью В ведущий вал 2 через эксцентрик 3 приводит водило 4 во вращательно-колебательное движение. Стержни, взаимодействуя со стенками канавок корпуса и барабана, приводят ведомый барабан 7 во вращение с угловой скоростью Б. При этом передаточное отношениеопределяется из соотношений 1.Б БББ 1 Примерная оценка нижней границы диапазона передаточных чисел при Б 8,6, Б 7,4,0. Примерная оценка верхней границы диапазона передаточных чисел при Б 33,32, Б 34,33,1089. В конструкторской практике передаточное число при проектировании обычно задается с допуском 5 и лишь в редких случаях с допуском 26. Анализ приведенных математических соотношений позволяет сделать вывод о непрерывности отрезка линии,42552008.02.28 отображающей значения передаточных чисел синусоэксцентриковой передачи для привода гибких связей. Чаще всего редукторы приводят в движение асинхронными двигателями. При этом ради понижения частоты вращения идут на использование электродвигателей с худшими массогабаритными и энергетическими показателями (см. таблицу) - вместо двухполюсных используют четырех-, шести-, восьми-, иногда десятиполюсные. Иллюстрация преимуществ двухполюсных асинхронных двигателей Условные обозначения кВт об/мин КПД Масса, кг асинхронных электродов АИР 180 М 8 - 8 полюсов 15,0 730 88,0 0,74 138,9 И 1602 - 2 полюса 15,0 2920 90,5 0,89 88,9 АИР 160 М 8 - 8 полюсов 11,0 720 87,0 0,73 108,9 АИР 132 М 2 - 2 полюса 11,0 2910 87,5 0,88 60,4- чем меньше , тем больший ток проходит в проводах, тем большими оказываются потери в них на нагрев. Широта кинематических возможностей синусоэксцентриковой передачи для привода гибких связей позволяет использовать двигатели с существенно меньшими массами и лучшими энергетическими показателями. Главным направлением совершенствования традиционно-промышленных редукторных передач на ближайшие десятилетия является увеличение, не менее чем на порядок,их ресурса 7. Основная причина низкой долговечности традиционно-промышленных зубчатых передач наличие явления монотонно-существенного возрастания контактных напряжений в опасных по питтингу околополюсных зонах и неотвратимость поэтому появления усталостного (катастрофического) износа через существенно меньшие промежутки времени, чем требуется достичь 8. У синусоэксцентриковой передачи для привода гибких связей отсутствует явление возрастания в процессе их эксплуатации кривизны взаимодействующих поверхностей и если она спроектирована правильно, то питтинг в ней никогда не появится. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: F16H 1/00
Метки: гибких, связей, синусоэксцентриковая, привода, передача
Код ссылки
<a href="https://by.patents.su/6-u4255-sinusoekscentrikovaya-peredacha-dlya-privoda-gibkih-svyazejj.html" rel="bookmark" title="База патентов Беларуси">Синусоэксцентриковая передача для привода гибких связей</a>
Синусоэксцентриковая передача
Номер патента: U 4045
Опубликовано: 30.12.2007
Автор: Игнатищев Руслан Михайлович
МПК: F16H 1/00
Метки: синусоэксцентриковая, передача
Текст:
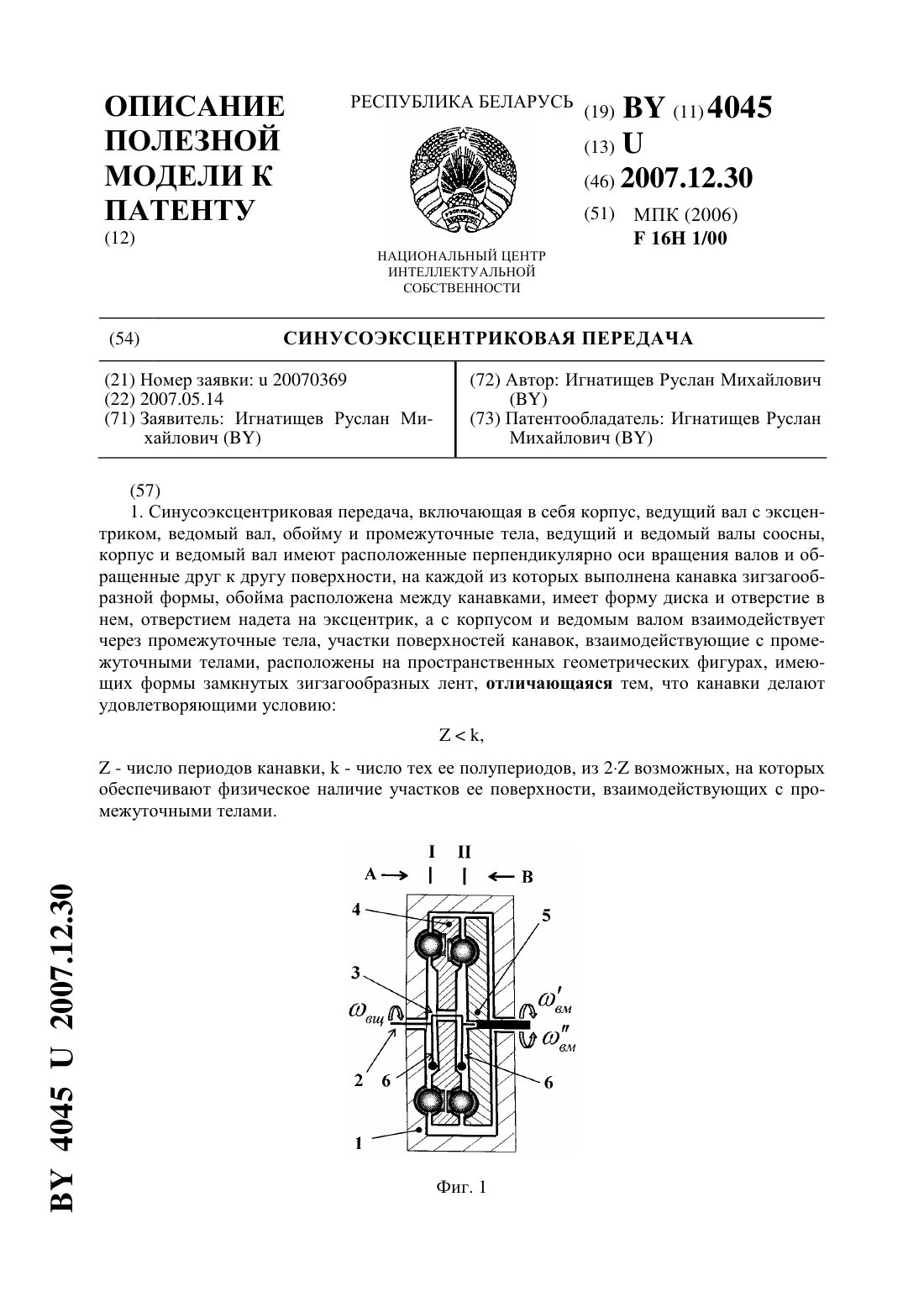
...корпус и ведомый вал имеют расположенные перпендикулярно оси вращения валов и обращенные друг к другу поверхности, на каждой из них выполнена канавка зигзагообразной формы, обойма расположена между канавками, имеет форму диска и отверстие в нем, отверстием надета на эксцентрик, а с корпусом и ведомым валом взаимодействует через промежуточные тела, участки поверхностей канавок, взаимодействующие с промежуточными телами, расположены на...
Шарнирная передача привода колеса автотранспортного средства
Номер патента: 6868
Опубликовано: 30.03.2005
Авторы: Кравченко Виктор Иванович, Шепеляковский Константин Захарович, Лобозов Владимир Петрович, Достанко Геннадий Александрович, Костюкович Геннадий Александрович, Гагасов Александр Матвеевич, Семеняко Михаил Михайлович, Никитин Сергей Иванович, Кузнецов Анатолий Алексеевич
МПК: F16D 3/84, B60K 17/22
Метки: шарнирная, передача, автотранспортного, средства, колеса, привода
Текст:
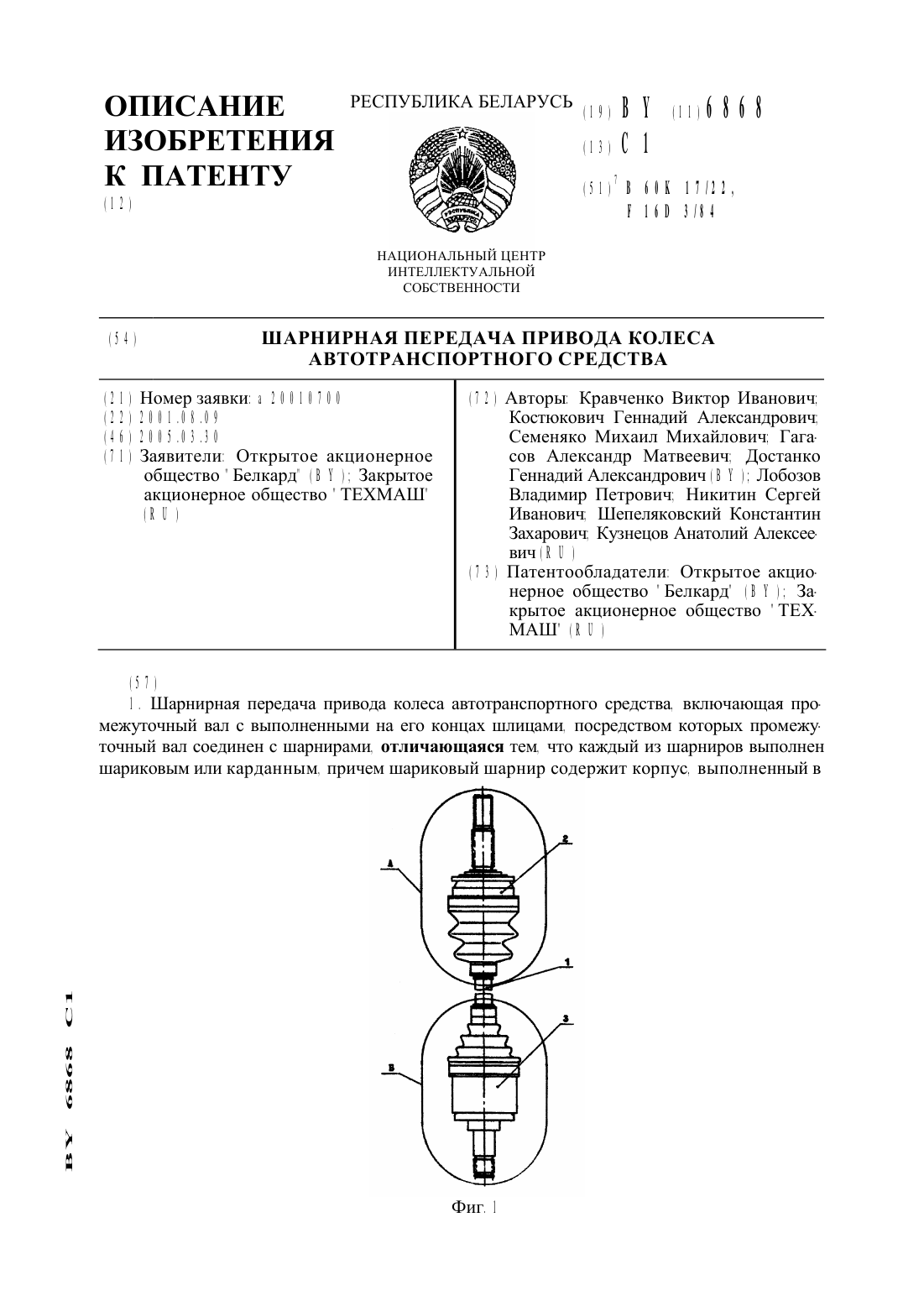
...4 4 ХГН. 2 0 ХГНТР и др подвергнутые цементации с последующей закалкой при печном нагреве и охлаждении в масле. используются углеродистые конструКционнь 1 е стали. например сталь 4 0 . сталь 5 0 и др подвергнутые нормализации с последующей закалкой токами высокой частоты. Кроме того. детали известной шарнирной передачи привода колеса автотранспортного средства Коробит в процессе цементации. что приводит К необходимости их дополнительного...
Шаровая передача
Номер патента: 5470
Опубликовано: 30.09.2003
Авторы: Рогачевский Сергей Николаевич, Латыпова Елена Юрьевна, Цумарев Юрий Алексеевич
МПК: F16H 1/34, F16H 13/08
Текст:
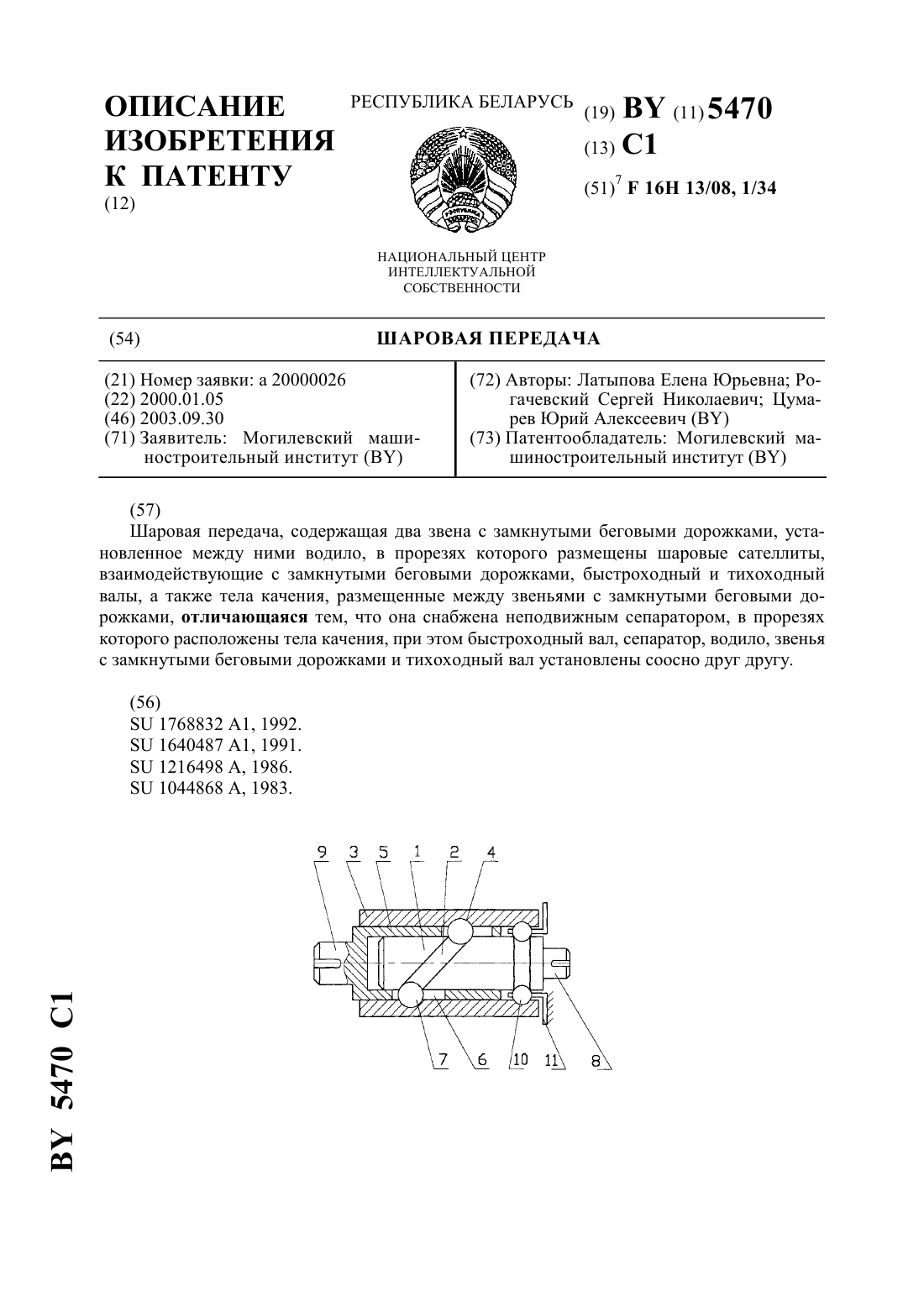
...взаимодействующие с замкнутыми беговыми дорожками, быстроходный и тихоходный валы, а также тела качения, размещенные между звеньями с замкнутыми беговыми дорожками, согласно изобретению, снабжена неподвижным сепаратором, в прорезях которого расположены тела качения, при этом быстроходный вал, сепаратор, водило, звенья с замкнутыми беговыми дорожками и тихоходный вал установлены соосно друг другу. Благодаря тому, что шаровая передача...
Фрикционная планетарная передача
Номер патента: U 2226
Опубликовано: 30.09.2005
Авторы: Давыденко Дмитрий Владимирович, Пашкевич Михаил Федорович
МПК: F16H 13/06
Метки: фрикционная, передача, планетарная
Текст:
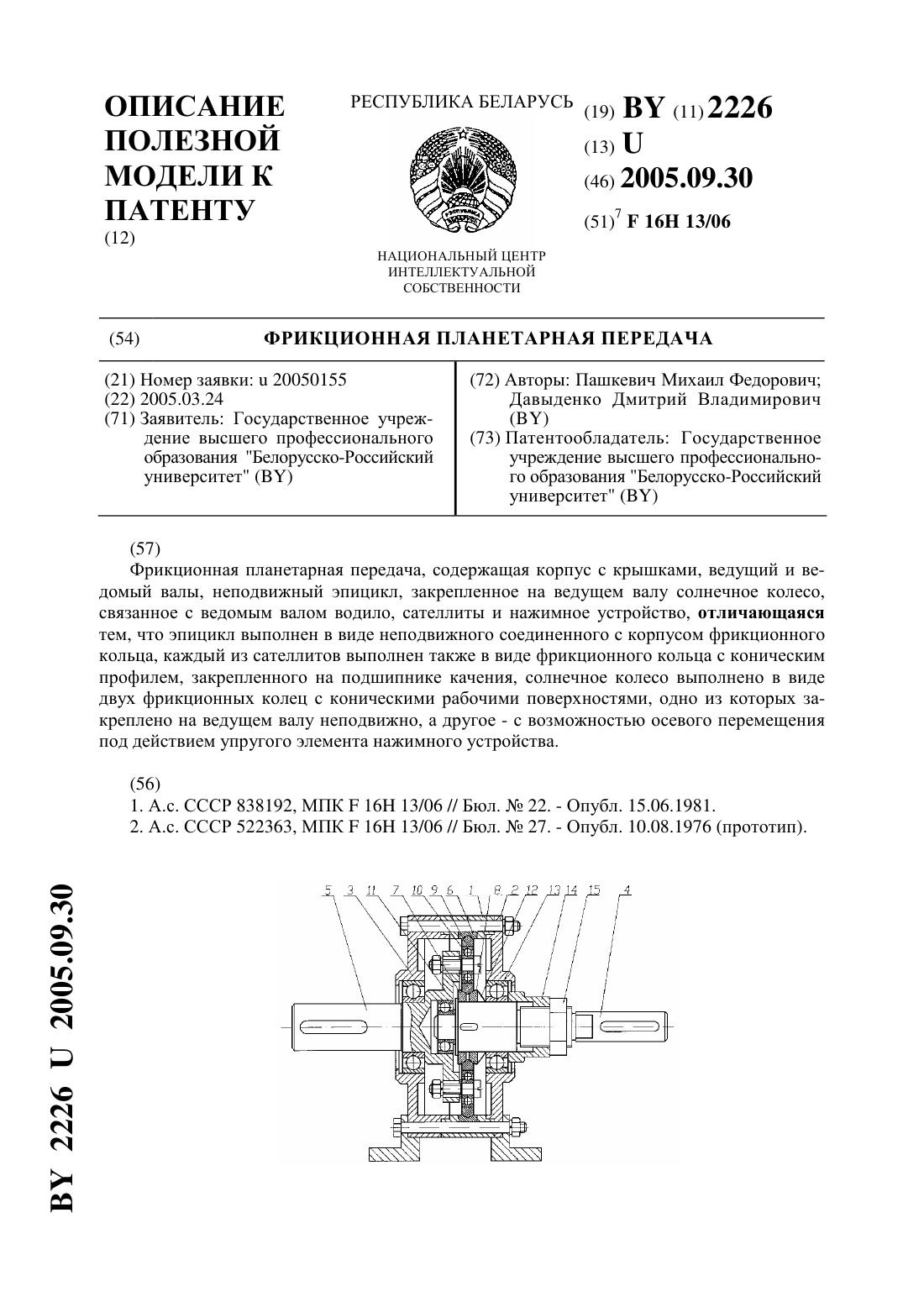
...передачи является сложность конструкции ее центрального колеса и сателлитов, выполненных в виде гибких замкнутых оболочек, заполненных текучим материалом, а также сложность конструкции нажимного устройства, выполненного в виде втулок, шариков и плунжеров, которые при изменении угла поворота ведущего вала относительно солнечной шестерни воздействуют на текучую массу. Задачей настоящей полезной модели является упрощение конструкции...
Планетарная передача
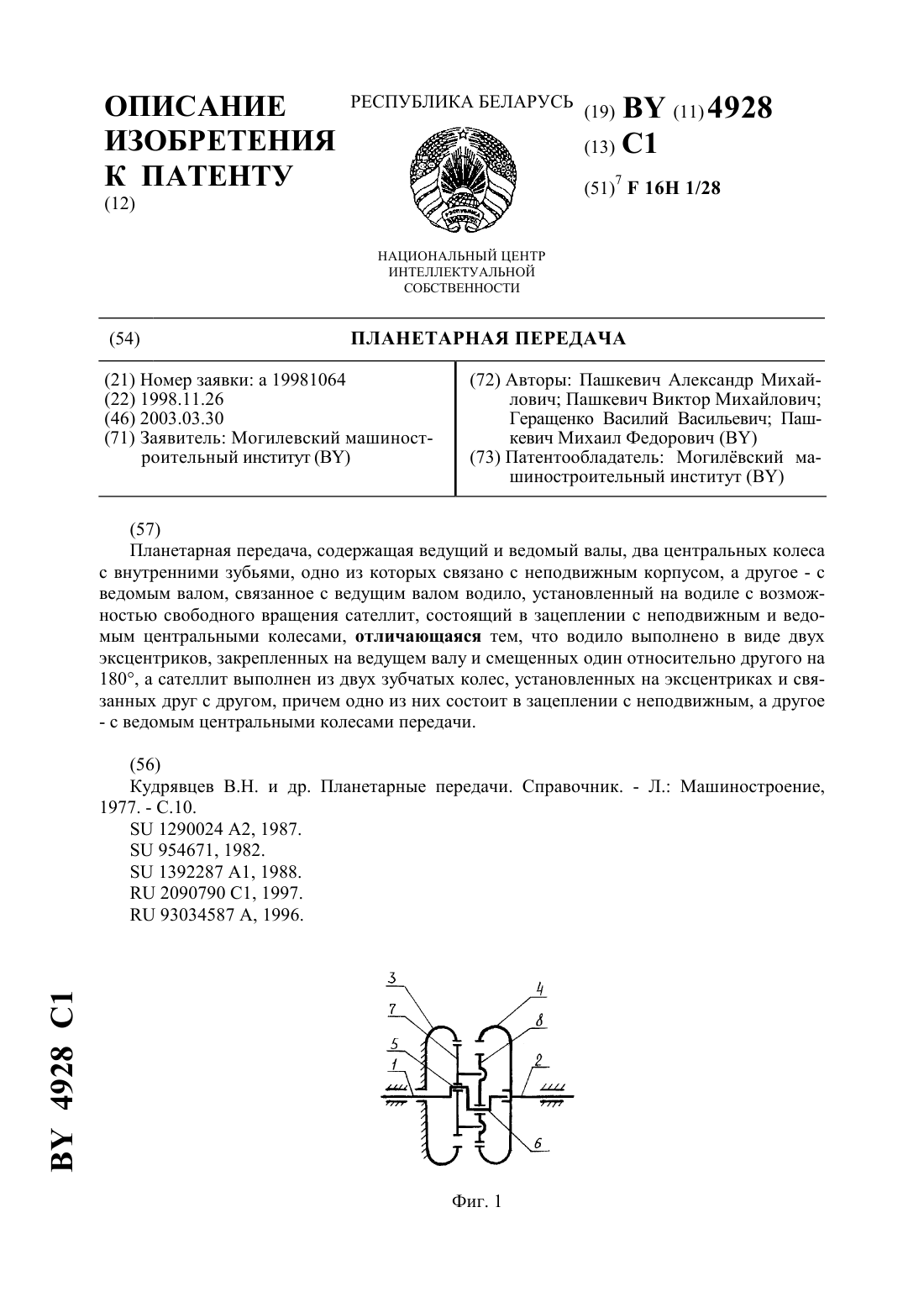
Номер патента: 4928
Опубликовано: 30.03.2003
Авторы: Пашкевич Александр Михайлович, Пашкевич Михаил Федорович, Геращенко Василий Васильевич, Пашкевич Виктор Михайлович
МПК: F16H 1/28
Метки: передача, планетарная
Текст:
...вибраций и повышенного шума. Следовательно, возникает задача снижения - вибраций передачи типа 2 К-Н с одним сателлитом. Сущность изобретения, позволяющего решить задачу снижения вибраций и уровня шума в передаче типа 2 К-Н с одним сателлитом, заключается в том, что в планетарной передаче, содержащей ведущий и ведомый валы, два центральных колеса с внутренними зубьями, одно из которых связано с неподвижным корпусом, а другое - с ведомым...
Предыдущий патент: Муфта зубчатая предохранительная
Следующий патент: Цилиндр среднего давления паровой турбины
Случайный патент: Приемопередатчик высокочастотной аппаратуры передачи команд релейной защиты и противоаварийной автоматики, данных и связи