Устройство для определения углового положения руля автомобильного транспорта

Текст
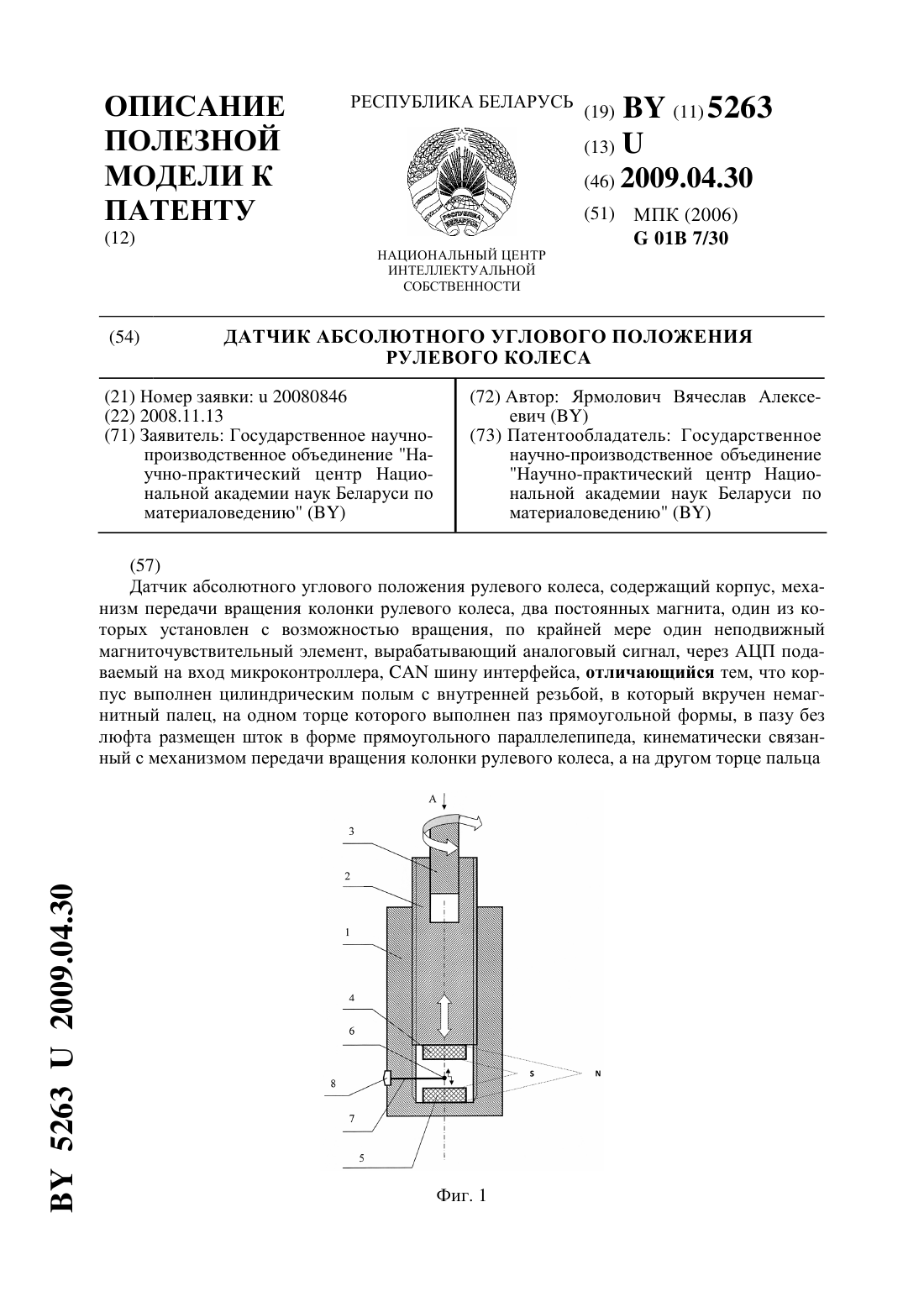
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ РУЛЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА(71) Заявитель Белорусский государственный университет(72) Автор Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Устройство для определения углового положения руля автомобильного транспорта,содержащее механизм передачи вращения колонки рулевого колеса, немагнитный корпус с крышкой, выполненный полым, цилиндрическим с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в котором без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи вращения колонки рулевого колеса, а другой торец пальца кинематически связан с постоянным магнитом, установленным с возможностью совместного с пальцем осевого перемещения внутри указанного корпуса, причем неподвижный магниточувствительный элемент, размещенный на плоском держателе, выполнен с возможностью плавной регулировки расстояния от крышки корпуса, подключен к входу микроконтроллера с -шиной интерфейса для передачи данных в форме кода Грэя в электронную систему управления движением автомобиля, отличающееся тем, что указанный постоянный магнит намагничен перпендикулярно осевому перемещению и выполнен с двумя полюсными наконечниками в виде пластины со ступенькой, высота 102612014.08.30 которой приближенно равна половине ширины пластины полюсного наконечника магниточувствительный элемент выполнен в виде полупроводниковой структуры типа проводимости, обладающей -эффектом и -образной вольт-амперной характеристикой,подключен через нагрузочное электросопротивление к источнику питающего напряжения,выполненному с функцией постоянной ЭДС, причем плюс питаний подключен к области и установлен в зазоре упомянутых полюсных наконечников так, что плоскость раздела - и -областей структуры перпендикулярна пластинам полюсных наконечников магнита.(56) 1. Патент 2312363, МПК 01 3/488,01 7/30,01 5/12, 2007. 2. Сысоева С. Автомобильные датчики положения. Современные технологии и Новые перспективы. Ч. 3. Физические основы и коммерческие перспективы технологии полупроводниковых и пермаллоевых магниторезистивных датчиков //Компоненты и технологии.4. - 2005. 3. Патентна полезную модель 5310 , МПК 01 7/30, 2009 (прототип). 4. Бараночников М.Л. Микромагнитоэлектроника. Т. 1. - М. ДМК Пресс, 2001. - С. 87. 5. А. с. СССР 1739402, МПК 01 29/06, 1992. Полезная модель относится к измерительному оборудованию автомобильного транспорта, в частности к электронному устройству для определения угла поворота руля, и может использоваться для измерения абсолютного углового положения руля в диапазоне углов не менее 1080 непосредственно после включения зажигания даже в отсутствие перемещений руля и после кратковременных прерываний напряжения. Известен программируемый датчик абсолютного углового положения для автомобильного транспорта 1, который состоит из двух механически не взаимосвязанных и изолированных друг от друга частей с постоянным воздушным зазором в пространстве между ними. Одной частью является роторный узел, другая часть представляет собой статор - совокупность неподвижных механических и электронных частей, предоставляющих через контактный интерфейс информацию об угловом положении ротора с магнитом. Магнитная система датчика состоит из программируемой винтегральной схемы двухосевого магнитного углового энкодера с линейным аналоговым, широтно-импульсно модулированным или последовательным выходом и вращающегося цилиндрического дипольного диаметрально намагниченного магнита, взаиморасположение которых в рабочем режиме устройства обеспечивает детектирование угла поворота магнитного вектора, параллельного поверхности интегральной схемы. При этом угол вычисляется по сигналам массива планарных элементов Холла, чувствительных к перпендикулярным компонентам магнитного поля. Датчик обеспечивает высокую точность определения абсолютного углового положения объекта только в диапазоне углов от 0 до 360, что явно недостаточно для его непосредственного использования для измерения абсолютного углового положения рулевого колеса, поскольку необходим диапазон детектируемых углов не менее 1080. Кроме того, низкие уровни сигналов с массива планарных элементов Холла характеризуются низкой помехозащищенностью, поэтому находки внешних электромагнитных полей могут вызвать сбои в работе датчика. В транспортных средствах известно применение датчика 2 абсолютного углового положения рулевого колеса 3 с -магниточувствительными элементами. Поворот руля вращает шестерню, ведущую две другие шестерни, на которых установлены постоянные магниты. -магниточувствительные элементы регистрируют угловые положения магнитов и вырабатывают аналоговые сигналы, через АЦП подаваемые на вход 2 102612014.08.30 микроконтроллера. Количество зубьев в ведомых шестернях различно, что обеспечивает их вращение с разными скоростями. Сканируя оба фактических угла поворота, можно вычислить общий угол поворота руля даже без счетчика оборотов. После нескольких оборотов руля каждая шестерня возвращается в свое начальное положение. Благодаря системе шестерен обеспечивается достаточная точность измерений в угловом диапазоне 780. Угол и скорость поворота руля выводятся в формате . Количество магниточувствительных элементов не менее 2-х и зависит от архитектуры избыточности (дублирования компонент), т.е. 4, 6 и т.д., которые могут не только повышать надежность функционирования, но и снижать ее при зависании микроконтроллера вследствие обработки дополнительного числа сигналов. Другими недостатками описанного устройства являются сложность механической конструкции датчика, содержащей три шестерни, механизм их возврата и малый уровень детектируемых магнитных полей -элементами, т.е. слабая помехозащищенность от внешних электромагнитных полей. Наиболее близким по технической сущности к предлагаемому решению является датчик угла поворота рулевого колеса автомобиля 3 (прототип). Он содержит корпус, механизм передачи вращения колонки рулевого колеса, постоянный магнит, установленный с возможностью вращения, по крайней мере один неподвижный магниточувствительный элемент Холла, вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера, -шину интерфейса. При этом корпус выполнен цилиндрическим,полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи вращения колонки рулевого колеса, а на другом торце пальца укреплен цилиндрический магнит, намагниченный аксиально, установленный с возможностью вращения и совместного с пальцем осевого перемещения внутри магнитомягкого ярма, установленного соосно в немагнитном корпусе, причем ярмо выполнено в виде кольца одинаковой высоты с магнитом и содержит две внутренние одинаковые радиальные проточки, а магниточувствительный элемент Холла размещен на плоском держателе в средней части ярма с возможностью плавной регулировки расстояния от торца корпуса и нормалью к пластине Холла, направленной вдоль радиуса. Вследствие относительно низкой чувствительности элемента Холла к магнитным полям и генерируемого им сигнала в аналоговой форме требуется АЦП для преобразования его в цифровой формат, а также использование небронированной магнитной системы магнитно-полуоткрытого типа отрицательно влияет на помехозащищенность прототипа от внешних электромагнитных полей, которые обычно в избытке присутствуют в устройствах автомобильной техники. Поэтому задачей, решаемой в настоящей предложенной полезной модели, является повышение помехоустойчивости к внешним электромагнитным полям, в том числе квазистатическим магнитным полям. Устройство для определения углового положения руля автомобильного транспорта содержит механизм передачи вращения колонки рулевого колеса, немагнитный корпус с крышкой, выполненный полым, цилиндрическим с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в котором без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи вращения колонки рулевого колеса, а другой торец пальца кинематически связан с постоянным магнитом, установленным с возможностью совместного с пальцем осевого перемещения внутри указанного корпуса, причем неподвижный магниточувствительный элемент, размещенный на плоском держателе, выполнен с возможностью плавной регулировки расстояния от крышки корпуса, подключен к входу 102612014.08.30 микроконтроллера с -шиной интерфейса для передачи данных в форме кода Грэя в электронную систему управления движением автомобиля. Оно отличается тем, что указанный постоянный магнит намагничен перпендикулярно осевому перемещению и выполнен с двумя полюсными наконечниками в виде пластины со ступенькой, высота которой приближенно равна половине ширины пластины полюсного наконечника магниточувствительный элемент, выполнен в виде полупроводниковой структуры типа проводимости, обладающей -эффектом 4 и -образной вольтамперной характеристикой, подключен через нагрузочное электросопротивление к источнику питающего напряжения, выполненному с функцией постоянной ЭДС, причем плюс питания подключен к -области, и установлен в зазоре упомянутых полюсных наконечников так, что плоскость раздела - и -областей структуры перпендикулярна пластинам полюсных наконечников магнита. Анализ элементов устройства, приведенных в отличительной части, показывает, что некоторые из них могут встречаться по отдельности в различных аналогах технических решений. Однако в совокупности набор этих элементов не известен, поэтому является новым. Кроме того, совокупность этих элементов придает устройству новое качество функционирования и обеспечивает полное решение поставленной задачи. Поэтому заявляемое устройство соответствует критерию новизна по действующему законодательству. На фиг. 1 представлен общий вид устройства в разрезе. На фиг. 2 - вид сверху, а на фиг. 3 - выходной сигнал с магниточувствительного элемента как функция угла поворота макета рулевого колеса. Устройство может встраиваться в рулевую колонку и содержит полый немагнитный цилиндрический корпус 1 с внутренней резьбой, в который вкручен немагнитный палец 2,на одном конце (торце) которого выполнен паз в форме прямоугольного параллепипеда, в паз заходит без люфта шток 3 механизма передачи вращения колонки рулевого колеса(шток 3 может вращаться в подшипниках), а на другом торце немагнитного пальца 2 установлен механизм преобразования вращательно-поступательного движения в чисто поступательное осевое перемещение постоянного магнита 4 (например, посредством шарика и немагнитной прокладки, которые цифрами не обозначены, хотя конструкция может быть и другой), причем постоянный магнит 4 намагничен перпендикулярно осевому перемещению, установлен с возможностью совместного с немагнитным пальцем 2 перемещения вдоль оси симметрии цилиндрического корпуса. Магнит 4 целесообразно использовать из высокоэнергетичных материалов, например 5 или неодим-железо-бор. Магнит 4 содержит полюсные идентичные наконечники 5, предпочтительно из армко-железа, выполненные в виде пластины со ступенькой, высота которой приближенно равна половине высоты пластины. Магниточувствительный элемент 6 выполнен в виде полупроводниковой структуры типа проводимости, обладающей -эффектом 4 и -образной вольт-амперной характеристикой, подключен через нагрузочное электросопротивление к источнику питающего напряжения, выполненному с функцией постоянной ЭДС, причем плюс питания подключен к -области. Магниточувствительный элемент 6 размещен неподвижно на плоском держателе 7 с возможностью плавной регулировки расстояния от торца корпуса 1. Способ формирования - и -областей описан в 5. Вектор индукция магнитного поля 0 прикладывается в плоскости, параллельной плоскости раздела - и -областей. Магниточувствительный элемент 6 генерирует частотно-импульсный выходной сигнал при величине индукции магнитного поля 0, находящейся в диапазоне (3001000) мТл 4. Такие структуры поставляются фирмой, Россия, г. Москва (Институт проблем управления). Разъем 8 магниточувствительного элемента 6 установлен в крышке 9 корпуса и служит для подвода напряжения питания и съема выходного частотно-импульсного сигнала,который подается на вход микроконтроллера (не показан, поскольку описан в прототипе) 4 102612014.08.30 и в дальнейшем, после обработки, передается по -шине интерфейса в электронную систему управления движением автомобиля. Немагнитная крышка 9 выполнена профильной с П-образными направляющими под полюсные наконечники 5. Внутри П-образных направляющих размещены пружинящие элементы 10, находящиеся в наполовину сжатом состоянии и поджимающие в конечном счете магнит 4 с полюсными наконечниками 5 к немагнитному пальцу 2. Устройство работает следующим образом. Поворот руля вращает шток 3, который в одном из концов выполнен в форме прямоугольного параллепипеда и вставлен в паз прямоугольной формы немагнитного пальца 2 практически без люфта, но и без трения. Вращение штока 3 вызывает вращение немагнитного пальца 2, имеющего крупную внешнюю резьбу, и одновременное его перемещению вдоль оси на величину шага резьбы при каждом его повороте на 360. Присутствие смазки в трущихся поверхностях резьбы необходимо, однако может поддерживаться отдельным устройством в автоматическом режиме. Вращение рулевого колеса на три оборота влево или вправо (максимально возможное число оборотов) соответственно вызывает поворот немагнитного пальца 2 в корпусе 1 на угол до 1080. При этом постоянный магнит 4 перемещается вдоль оси корпуса 1. При этом в зазоре полюсных наконечников 5 в месте расположения элемента 6 меняется величина вектора индукции магнитного поля, которая направлена перпендикулярно оси перемещения пальца 2. Магниточувствительный элемент 6 вырабатывает однозначный и достаточно линейный от угла поворота руля (фиг. 3) частотно-импульсный сигнал. Выходной сигнал подается на вход микроконтроллера (не показан), обрабатывается в соответствии с заложенным алгоритмом, как правило, линеаризуется и передается по шине интерфейса в форме кода Грэя в электронную систему управления движением автомобиля. Следует отметить, что явление управляемой скачковой проводимости (-эффект) возникает в структурах с -образной вольт-амперной характеристикой и заключается в том,что при определенных значениях питающего напряжения и внешнего магнитного поля проводимость полупроводниковой структуры (в прямом направлении) и, соответственно,амплитуда протекающего через нее тока меняются скачком со временем переходного процесса 1-5 мкс. Изменение проводимости, подобно структурам с -образной вольтамперной характеристикой, сопровождается возникновением шнура тока, но с иными физическими свойствами, основным из которых является постоянство плотности тока в шнуре при изменении напряжения на структуре. Основной особенностью магниточувствительного элемента 6 является способность не только воспринимать магнитное поле, но и производить его преобразование на молекулярном уровне в объеме кристалла без дополнительных электронных схем. Следовательно, вышеизложенные введения свидетельствуют о выполнении при использовании заявленного устройства следующей совокупности условий средство, воплощающее заявленную полезную модель, при ее осуществлении относится к измерительному оборудованию транспорта, в частности к электронным устройствам абсолютного углового положения рулевого колеса для заявленного устройства в том виде, как оно охарактеризовано в нижеизложенной формуле полезной модели, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов, поэтому заявляемое устройство соответствует требованию промышленная применимость по действующему законодательству средство, воплощающее заявленное, в совокупности своих признаков обладает новизной и при его осуществлении способно обеспечить достижение усматриваемого заявителем технического результата, а именно повышения помехоустойчивости к внешним электромагнитным полям, в том числе к квазистатическим магнитным полям, за счет применения магниточувствительного элемента с -эффектом, который генерирует помехо 5 102612014.08.30 устойчивый частотно-импульсный выходной сигнал высокой амплитуды (до 50 от напряжения питания) без применения электронных схем преобразования. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: G01B 7/30
Метки: определения, руля, положения, устройство, транспорта, автомобильного, углового
Код ссылки
<a href="https://by.patents.su/6-u10261-ustrojjstvo-dlya-opredeleniya-uglovogo-polozheniya-rulya-avtomobilnogo-transporta.html" rel="bookmark" title="База патентов Беларуси">Устройство для определения углового положения руля автомобильного транспорта</a>
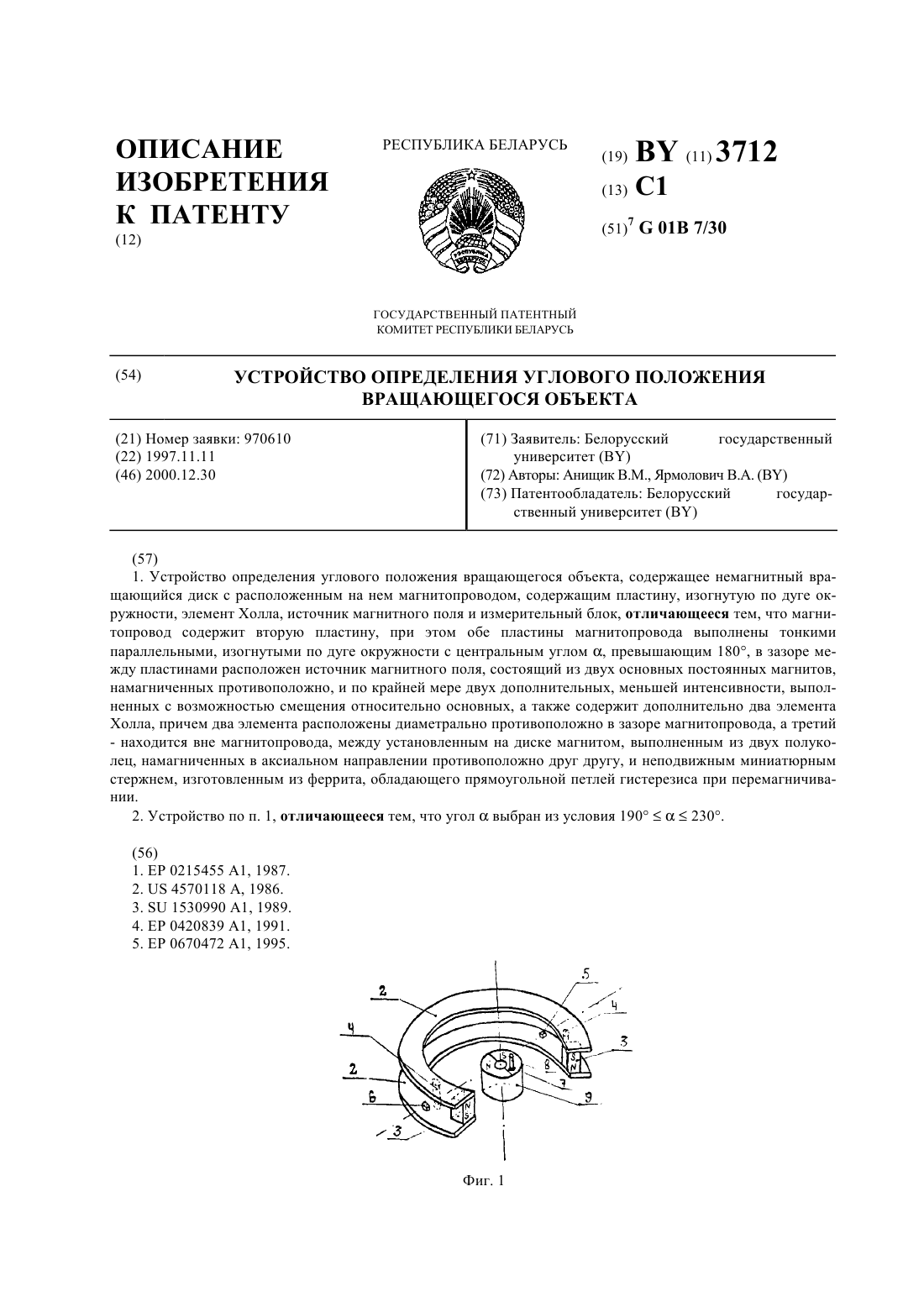
Датчик абсолютного углового положения рулевого колеса
Номер патента: U 5263
Опубликовано: 30.04.2009
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01B 7/30
Метки: абсолютного, колеса, углового, датчик, рулевого, положения
Текст:
...крайней мере один неподвижный магниточувствительный элемент, вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера,шину интерфейса, отличается тем, что корпус выполнен цилиндрическим полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи...
Устройство определения углового положения вращающегося объекта
Номер патента: 3712
Опубликовано: 30.12.2000
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: G01B 7/30
Метки: объекта, положения, определения, углового, устройство, вращающегося
Текст:
...источников магнитного поля в магнитопроводе, обеспечивающее строго линейную зависимость выходного сигнала от угла поворота в диапазоне углов более 180 при многооборотном вращении независимо от идентичности и симметричности постоянных магнитов. При этом выходной сигнал не зависит от аксиальных смещений вращающегося диска. Новым является использование трех элементов Холла, находящихся в функциональной связи с источниками магнитного...
Бесконтактный датчик углового положения
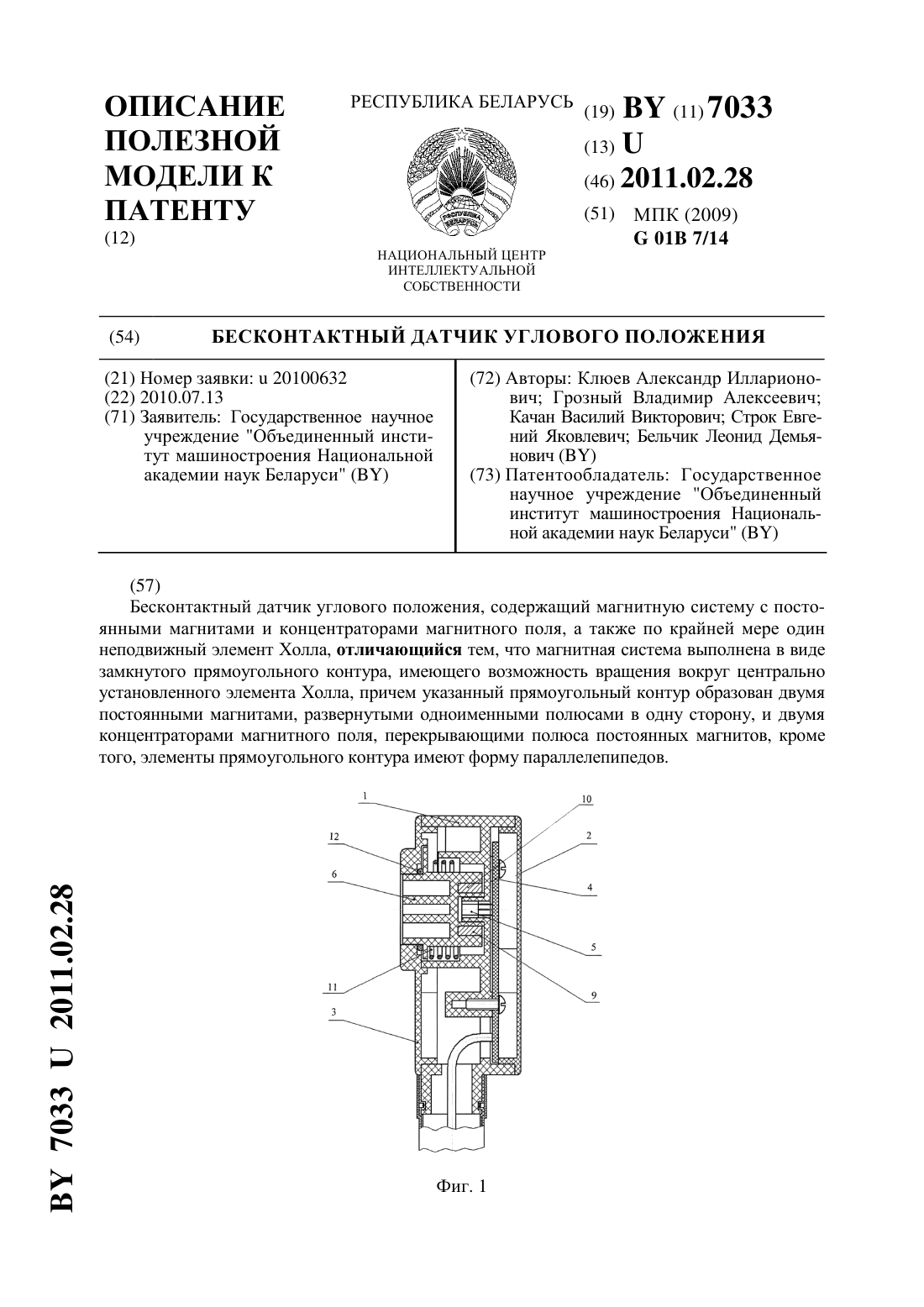
Номер патента: U 7033
Опубликовано: 28.02.2011
Авторы: Клюев Александр Илларионович, Строк Евгений Яковлевич, Качан Василий Викторович, Бельчик Леонид Демьянович, Грозный Владимир Алексеевич
МПК: G01B 7/14
Метки: датчик, бесконтактный, углового, положения
Текст:
...магнита относительно оси, проходящей между концентраторами, происходит перераспределение магнитного потока внутри магнитной системы,величина которого измеряется элементами Холла. Недостатками известного датчика являются низкая помехозащищенность из-за разомкнутой магнитной системы, нетехнологичность изготовления и сборки при относительно больших габаритных размерах. Задачей настоящей полезной модели является повышение помехоустойчивости к...
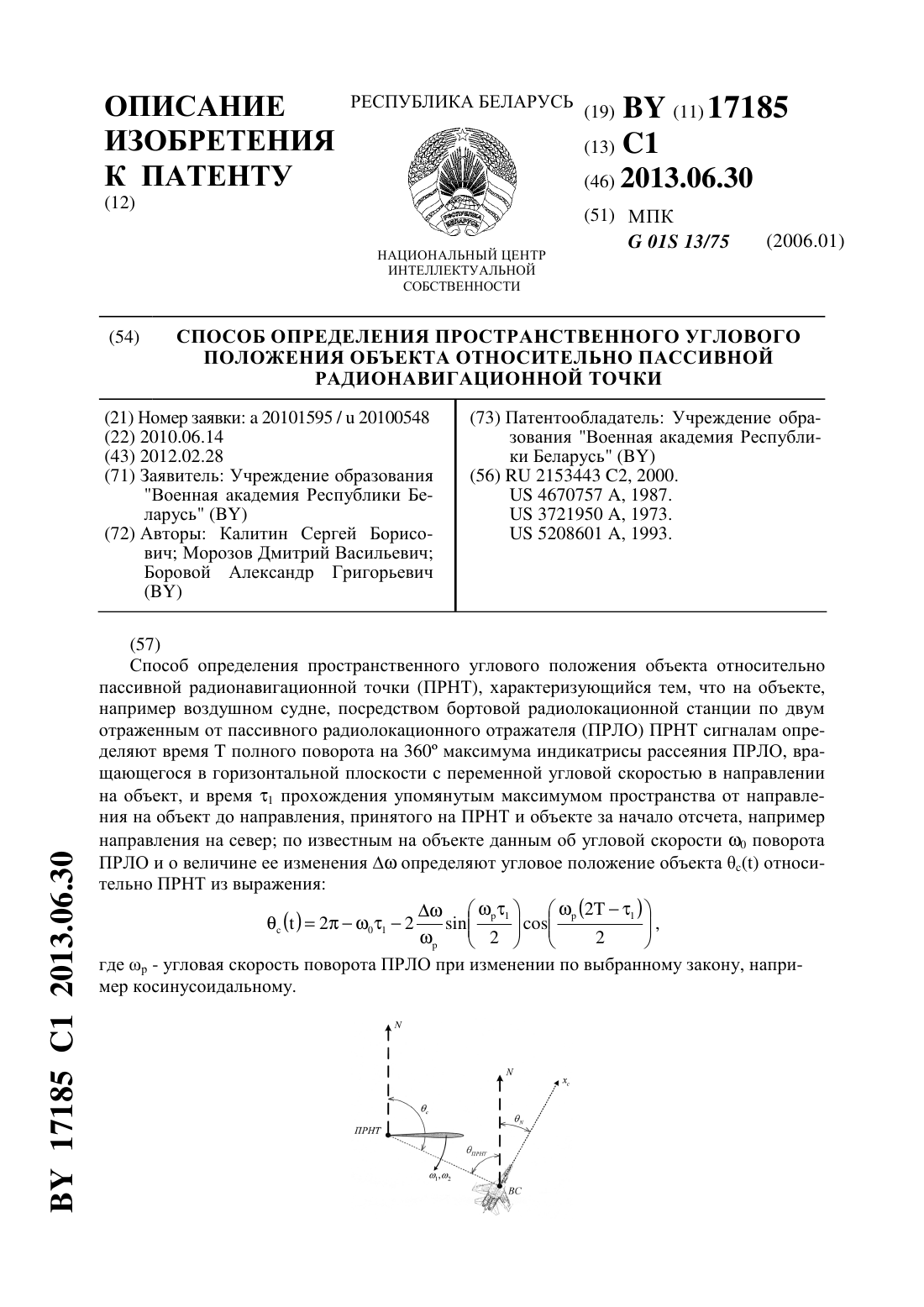
Способ определения пространственного углового положения объекта относительно пассивной радионавигационной точки
Номер патента: 17185
Опубликовано: 30.06.2013
Авторы: Боровой Александр Григорьевич, Морозов Дмитрий Васильевич, Калитин Сергей Борисович
МПК: G01S 13/75
Метки: положения, способ, углового, объекта, относительно, пассивной, точки, пространственного, определения, радионавигационной
Текст:
...активные станции большой массы и габаритов. Технической задачей предлагаемого способа является определение пространственного углового положения ВС относительно пассивных радионавигационных точек (ПРНТ), а также повышение скрытности самих радиомаяков. Поставленная задача достигается путем использования вместо активных радиомаяковответчиков пассивных радиолокационных отражателей (ПРЛО), как показано на фигуре,вращающихся с известной...
Устройство для принудительной остановки автомобильного транспорта

Номер патента: U 2569
Опубликовано: 30.04.2006
Автор: Гучок Александр Евгеньевич
МПК: E01F 13/00
Метки: автомобильного, транспорта, устройство, принудительной, остановки
Текст:
...крышка 7 открывается для облегчения доступа к узлам установки при ее зарядке и подготовке к работе и имеет выступ 9, входящий во взаимодействие с выступом 10 металлического снаряда 3, размещенным со стороны боковой крышки для возможности беспрепятственного разматывания троса при выстреливании металлического снаряда, а также ручку 11 и при необходимости электропривод (на чертеже не показан). Боковая крышка после открытия обеспечивает...