Множительно-делительное устройство
Номер патента: 5626
Опубликовано: 30.12.2003
Текст
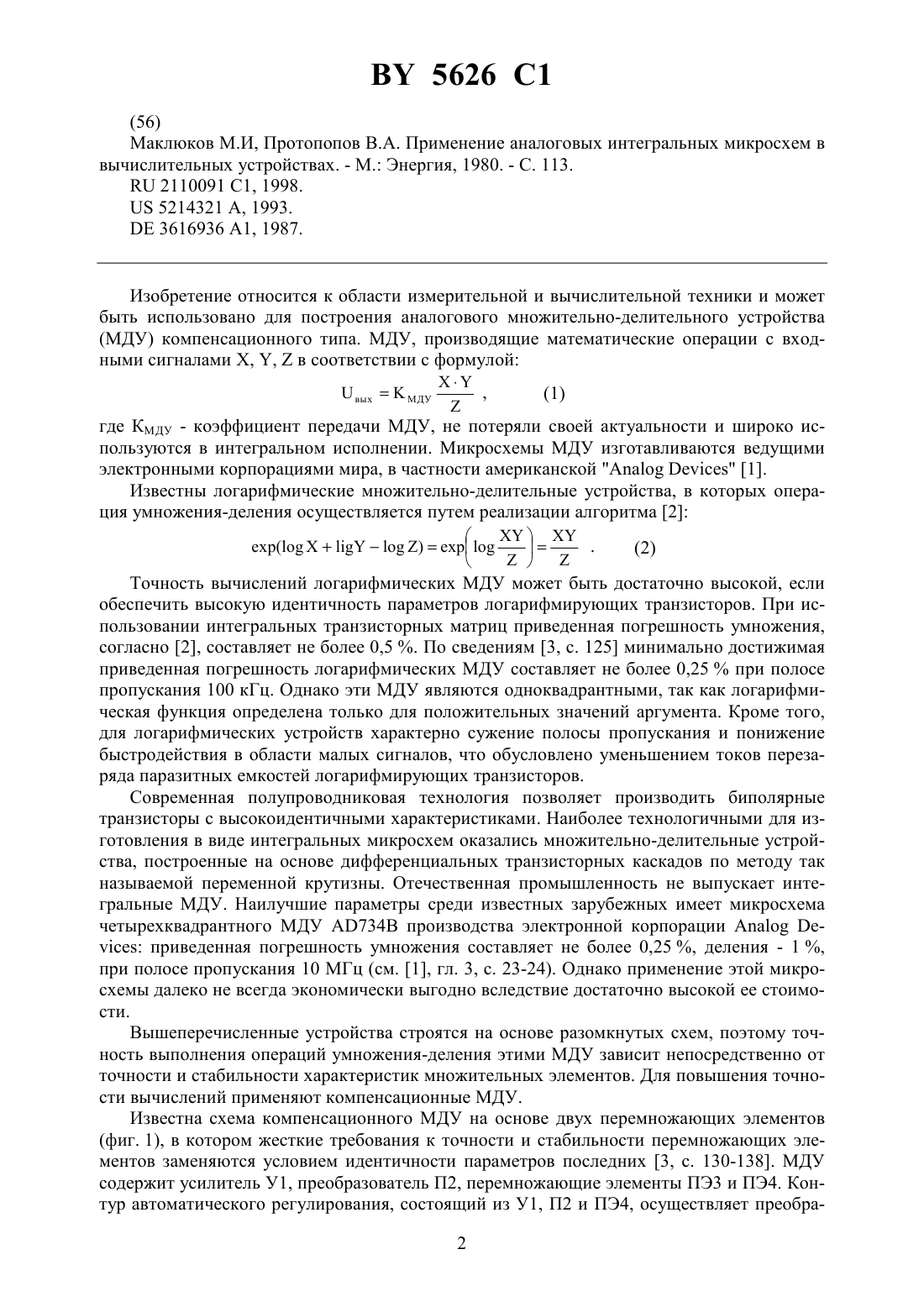
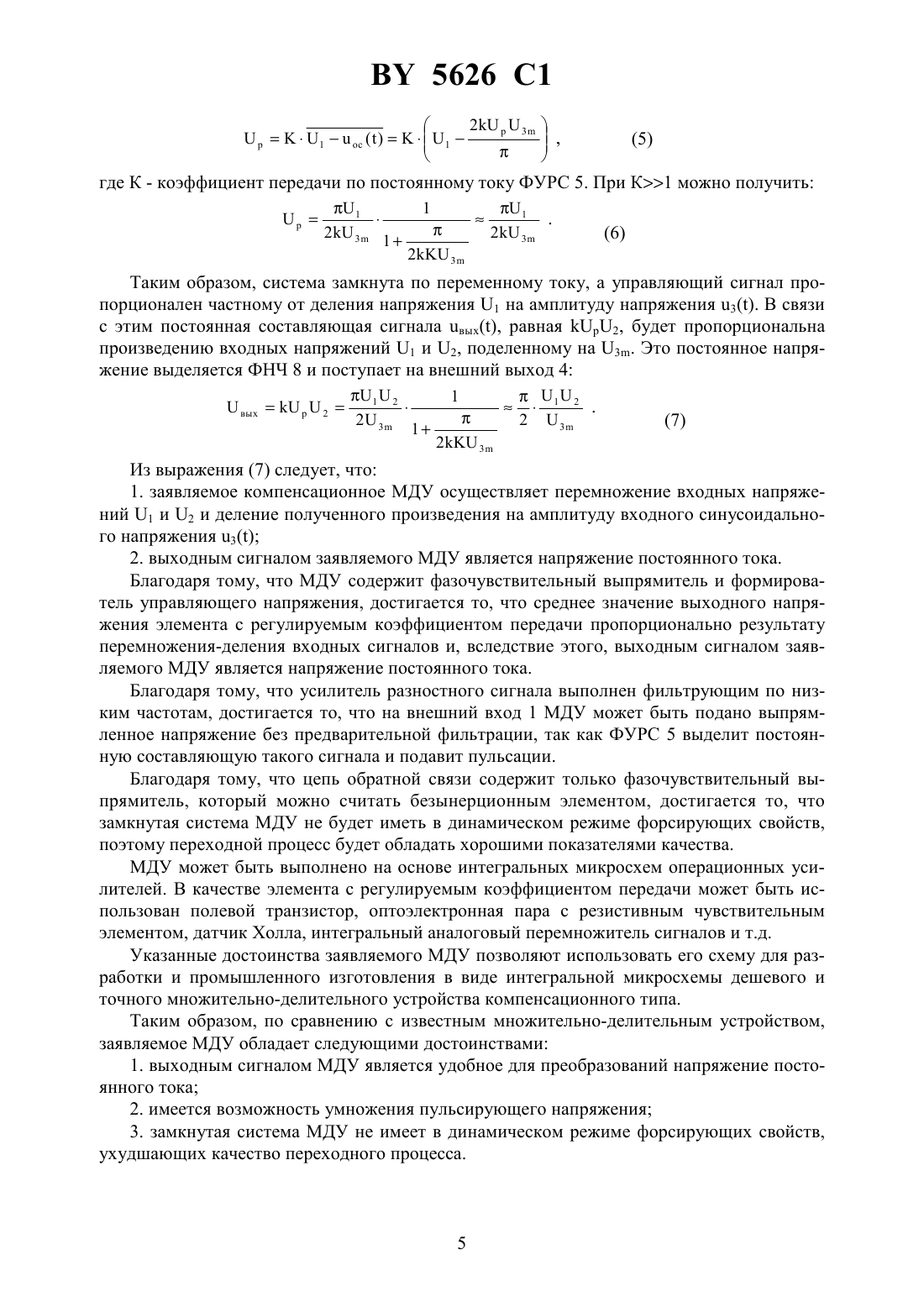
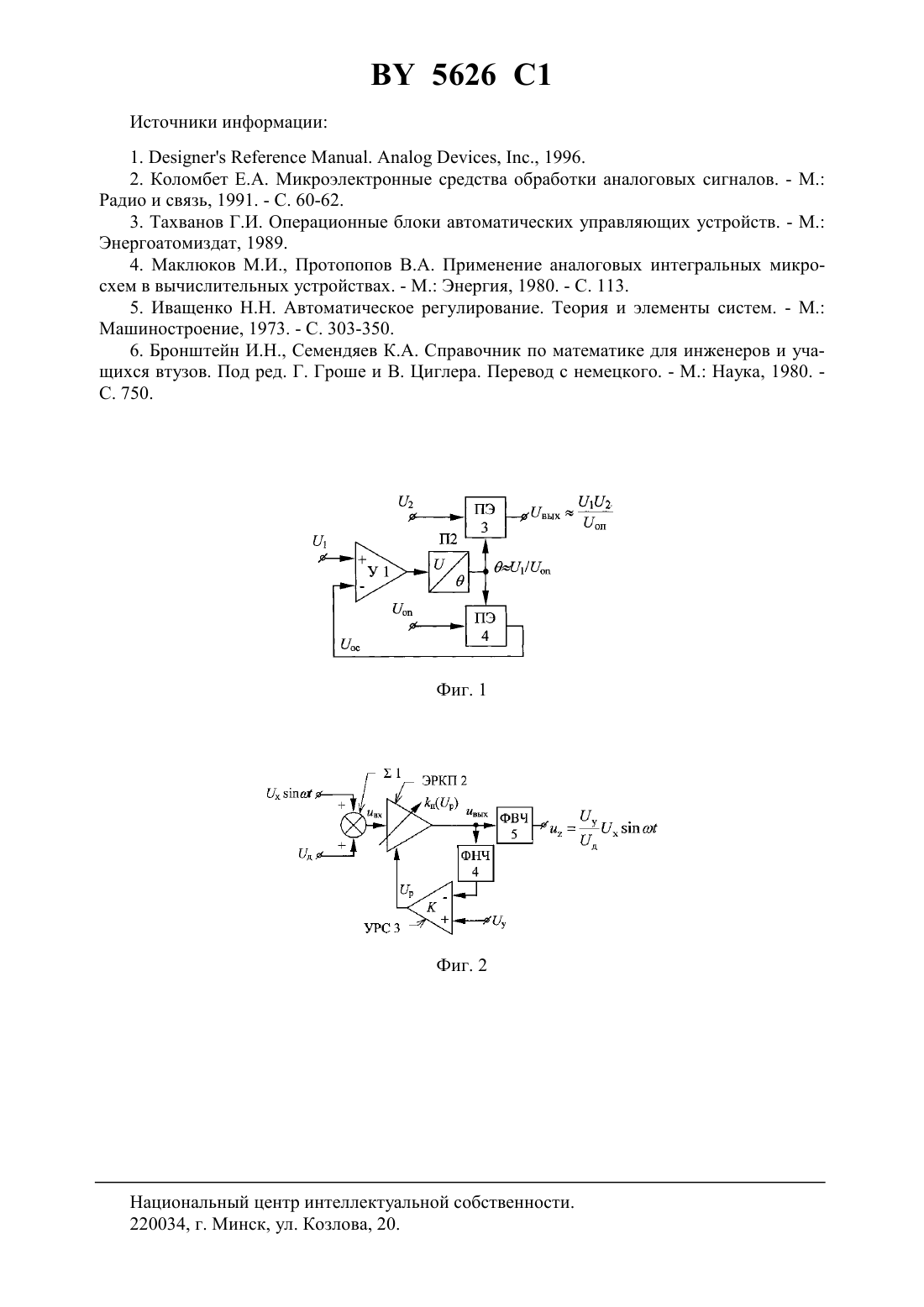
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Гомельский государственный технический университет имени П.О. Сухого(72) Авторы Абаринов Евгений Георгиевич Леонов Сергей Иванович(73) Патентообладатель Учреждение образования Гомельский государственный технический университет имени П.О. Сухого(57) Множительно-делительное устройство, содержащее первый, второй, третий внешние входы и внешний выход, усилитель разностного сигнала, сумматор, элемент с регулируемым коэффициентом передачи, фильтр низких частот, при этом неинвертирующий вход усилителя разностного сигнала соединен с первым внешним входом, входы сумматора соединены соответственно со вторым и третьим внешними входами, причем выход усилителя разностного сигнала и выход сумматора подключены соответственно к первому и второму входам элемента с регулируемым коэффициентом передачи, а выход последнего соединен со входом фильтра низких частот, отличающееся тем, что содержит фазочувствительный выпрямитель и формирователь управляющего напряжения, усилитель разностного сигнала выполнен фильтрующим по низким частотам, при этом первый вход фазочувствительного выпрямителя соединен с выходом элемента с регулируемым коэффициентом передачи, второй вход фазочувствительного выпрямителя соединен через формирователь управляющего напряжения с третьим внешним входом, выход фазочувствительного выпрямителя подключен к инвертирующему входу усилителя разностного сигнала, а выход фильтра низких частот подключен к внешнему выходу.(56) Маклюков М.И, Протопопов В.А. Применение аналоговых интегральных микросхем в вычислительных устройствах. - М. Энергия, 1980. - С. 113.2110091 1, 1998.5214321 , 1993.3616936 1, 1987. Изобретение относится к области измерительной и вычислительной техники и может быть использовано для построения аналогового множительно-делительного устройства(МДУ) компенсационного типа. МДУ, производящие математические операции с входными сигналами , ,в соответствии с формулойвыхМДУ где КМДУ - коэффициент передачи МДУ, не потеряли своей актуальности и широко используются в интегральном исполнении. Микросхемы МДУ изготавливаются ведущими электронными корпорациями мира, в частности американской 1. Известны логарифмические множительно-делительные устройства, в которых операция умножения-деления осуществляется путем реализации алгоритма 2 Точность вычислений логарифмических МДУ может быть достаточно высокой, если обеспечить высокую идентичность параметров логарифмирующих транзисторов. При использовании интегральных транзисторных матриц приведенная погрешность умножения,согласно 2, составляет не более 0,5 . По сведениям 3, с. 125 минимально достижимая приведенная погрешность логарифмических МДУ составляет не более 0,25 при полосе пропускания 100 кГц. Однако эти МДУ являются одноквадрантными, так как логарифмическая функция определена только для положительных значений аргумента. Кроме того,для логарифмических устройств характерно сужение полосы пропускания и понижение быстродействия в области малых сигналов, что обусловлено уменьшением токов перезаряда паразитных емкостей логарифмирующих транзисторов. Современная полупроводниковая технология позволяет производить биполярные транзисторы с высокоидентичными характеристиками. Наиболее технологичными для изготовления в виде интегральных микросхем оказались множительно-делительные устройства, построенные на основе дифференциальных транзисторных каскадов по методу так называемой переменной крутизны. Отечественная промышленность не выпускает интегральные МДУ. Наилучшие параметры среди известных зарубежных имеет микросхема четырехквадрантного МДУ 734 производства электронной корпорацииприведенная погрешность умножения составляет не более 0,25 , деления - 1 ,при полосе пропускания 10 МГц (см. 1, гл. 3, с. 23-24). Однако применение этой микросхемы далеко не всегда экономически выгодно вследствие достаточно высокой ее стоимости. Вышеперечисленные устройства строятся на основе разомкнутых схем, поэтому точность выполнения операций умножения-деления этими МДУ зависит непосредственно от точности и стабильности характеристик множительных элементов. Для повышения точности вычислений применяют компенсационные МДУ. Известна схема компенсационного МДУ на основе двух перемножающих элементов(фиг. 1), в котором жесткие требования к точности и стабильности перемножающих элементов заменяются условием идентичности параметров последних 3, с. 130-138. МДУ содержит усилитель У 1, преобразователь П 2, перемножающие элементы ПЭ 3 и ПЭ 4. Контур автоматического регулирования, состоящий из У 1, П 2 и ПЭ 4, осуществляет преобра 2 5626 1 зование входного напряжения 1 в управляющий параметр . Алгоритм работы контура может быть описан балансным уравнением 1-1-п 0 (фиг. 1), поэтому управляющий параметрбудет пропорционален частному от деления 1 на опорное напряжение оп. ПЭ 3 перемножаети входное напряжение 2. В результате выходное напряжение вых МДУ будет пропорционально произведению 1 и 2, поделенному на п. Обеспечение идентичности параметров перемножающих элементов облегчается при использовании импульсных преобразователей. В 3, с. 130-138 приведена схема компенсационного МДУ с время-импульсным модулятором в качестве П 2 и амплитудно-импульсными модуляторами в качестве ПЭ 3 и ПЭ 4. Точность этого МДУ ограничена разбросом сопротивлений замкнутых ключей амплитудно-импульсных модуляторов, температурным дрейфом этих сопротивлений, а также импульсными искажениями (выбросы, завалы фронтов). Основная приведенная погрешность МДУ не более 0,05 достигается лишь при тщательном согласовании ключевых сопротивлений импульсных МДУ. Наиболее близким к заявляемому по технической сущности является компенсационное МДУ, описанное в 4, в котором трудности идентификации характеристик множительных элементов преодолеваются за счет использования одного перемножающего элемента вместо двух и частотного разделения каналов сомножителей. МДУ с тремя входами и одним выходом (фиг. 2) состоит из сумматора 1, элемента с регулируемым коэффициентом передачи пЭРКП 2 (перемножающий элемент), усилителя разностного сигнала УРС 3 с коэффициентом усиления К, фильтра низких частот ФНЧ 4 и фильтра высоких частот ФВЧ 5. На вход ЭРКП 2 с выхода 1 подается сумма напряжений(вхдх ), поэтому выходное напряжение ЭРКП 2 равно выхп(р)д. Постоянная составляющая данного напряжения, равная п(р)д, выделяется с помощью ФНЧ 4 в цепи обратной связи и подается на инвертирующий вход УРС 3, на неинвертирующий вход которого подается напряжение сомножителя у. При этом выходное напряжение УРС 3 равноКу-п(р)д. Отсюда при достаточно большом коэффициенте усиленияполучаем п(р)/д. Выходное напряжение МДУ, представляющее собой составляющую несущей частоты , выделенную при помощи ФВЧ 5, равноп Таким образом, МДУ осуществляет умножение и деление величин, представленных в виде напряжений постоянного и переменного тока, и, как видно из выражения (3), выходным сигналом МДУ является синусоидальное напряжение. Однако удобнее иметь выходной сигнал МДУ в виде напряжения постоянного тока, так как его проще обрабатывать и преобразовывать, например, в унифицированный сигнал постоянного тока. Кроме того, на практике часто возникает необходимость в умножении пульсирующего напряжения, каким является выпрямленный выходной сигнал измерительного датчика, запитываемого переменным током или напряжением. К томуже в цепи обратной связи этого МДУ находится ФНЧ, поэтому, как это следует из теории автоматического регулирования 5, замкнутая система МДУ будет иметь в динамическом режиме нежелательные форсирующие свойства, проявлением которых станут выбросы (большая величина перерегулирования) на переходной характеристике системы. Задача, на решение которой направлено изобретение, заключается в улучшении технико-эксплуатационных параметров компенсационного МДУ с частотным разделением каналов сомножителей, что выражается в следующем 1. выходным сигналом МДУ должно быть напряжение постоянного тока 2. должна иметься возможность умножения пульсирующего напряжения 3. замкнутая система МДУ не должна иметь динамических свойств, ухудшающих качество переходного процесса. 3 5626 1 Решение поставленной задачи достигается за счет того, что известное МДУ, содержащее первый, второй, третий внешние входы и внешний выход, усилитель разностного сигнала, сумматор, элемент с регулируемым коэффициентом передачи, фильтр низких частот, при этом неинвертирующий вход усилителя разностного сигнала соединен с первым внешним входом, входы сумматора соединены соответственно со вторым и третьим внешними входами, причем выход усилителя разностного сигнала и выход сумматора подключены соответственно к первому и второму входам элемента с регулируемым коэффициентом передачи, а выход последнего соединен со входом фильтра низких частот,согласно изобретению, МДУ содержит фазочувствительный выпрямитель и формирователь управляющего напряжения, усилитель разностного сигнала выполнен фильтрующим по низким частотам, при этом первый вход фазочувствительного выпрямителя соединен с выходом элемента с регулируемым коэффициентом передачи, второй вход фазочувствительного выпрямителя соединен через формирователь управляющего напряжения с третьим внешним входом, выход фазочувствительного выпрямителя подключен к инвертирующему входу усилителя разностного сигнала, а выход фильтра низких частот подключен к внешнему выходу. На фиг. 1 представлена блок-схема компенсационного МДУ с двумя перемножающими элементами на фиг. 2 - блок-схема известного компенсационного МДУ (прототипа) с частотным разделением каналов сомножителей на фиг. 3 - блок-схема заявляемого компенсационного МДУ с частотным разделением каналов сомножителей. Заявляемое МДУ (фиг. 3) содержит внешние входы 1 и 2 перемножаемых напряжений соответственно 1 и 2, внешний вход 3 напряжения-делителя 33 , внешний выход 4 напряжения вых постоянного тока, фильтрующий усилитель разностного сигнала ФУРС 5, сумматор 6, элемент с регулируемым коэффициентом передачи ЭРКП 7,фильтр низких частот ФНЧ 8, фазочувствительный выпрямитель ФЧВ 9, формирователь управляющего напряжения ФУН 10, при этом неинвертирующий вход ФУРС 5 соединен с внешним входом 1, входы сумматора 6 соединены соответственно с внешними входами 2 и 3, причем выход ФУРС 5 и выход сумматора 6 подключены соответственно к первому и второму входам ЭРКП 7, при этом выход последнего соединен со входом ФНЧ 8 и первым входом ФЧВ 9, второй вход которого в свою очередь соединен через ФУН 10 с внешним входом 3, выход ФЧВ 9 подключен к инвертирующему входу ФУРС 5, а выход ФНЧ 8 подключен к внешнему выходу 4. МДУ функционирует следующим образом. Контур автоматического регулирования,состоящий из ФУРС 5, сумматора 6, ЭРКП 7 и ФЧВ 9, осуществляет преобразование входного напряжения 1 в регулирующее напряжение р, которое подается на первый вход ЭРКП 7, являющегося по технической сущности перемножающим элементом, в котором умножается регулирующее напряжениена напряжение, подаваемое на его второй вход. На второй вход ЭРКП 7 с выхода сумматора 6 подается сумма напряжений 2323 , поэтому выходной сигнал ЭРКП 7 содержит постоянную и переменную составляющие вых(23 ), где- коэффициент пропорциональности ЭРКП 7, 1/В. Переменная составляющая этого напряжения, равная 3 ,преобразуется с помощью ФЧВ 9 и ФУН 10 в пульсирующее напряжение обратной связи(ОС)3 . ФЧВ 9 является демодулятором, опорный сигнал которого оп есть импульсное периодическое напряжение прямоугольной формы, формируемое с помощью ФУН 10 из синусоидального напряжения 3 и имеющее частотуи фазу последнего. Разложение в ряд Фурье напряжения ос, согласно 6, имеет следующий видос ФУРС 5 выделяет и усиливает среднее значение разности напряжений 1 и 4 где К - коэффициент передачи по постоянному току ФУРС 5. При К 1 можно получить Таким образом, система замкнута по переменному току, а управляющий сигнал пропорционален частному от деления напряжения 1 на амплитуду напряжения 3. В связи с этим постоянная составляющая сигнала вых, равная 2, будет пропорциональна произведению входных напряжений 1 и 2, поделенному на 3. Это постоянное напряжение выделяется ФНЧ 8 и поступает на внешний выход 4 вых 2 Из выражения (7) следует, что 1. заявляемое компенсационное МДУ осуществляет перемножение входных напряжений 1 и 2 и деление полученного произведения на амплитуду входного синусоидального напряжения 3 2. выходным сигналом заявляемого МДУ является напряжение постоянного тока. Благодаря тому, что МДУ содержит фазочувствительный выпрямитель и формирователь управляющего напряжения, достигается то, что среднее значение выходного напряжения элемента с регулируемым коэффициентом передачи пропорционально результату перемножения-деления входных сигналов и, вследствие этого, выходным сигналом заявляемого МДУ является напряжение постоянного тока. Благодаря тому, что усилитель разностного сигнала выполнен фильтрующим по низким частотам, достигается то, что на внешний вход 1 МДУ может быть подано выпрямленное напряжение без предварительной фильтрации, так как ФУРС 5 выделит постоянную составляющую такого сигнала и подавит пульсации. Благодаря тому, что цепь обратной связи содержит только фазочувствительный выпрямитель, который можно считать безынерционным элементом, достигается то, что замкнутая система МДУ не будет иметь в динамическом режиме форсирующих свойств,поэтому переходной процесс будет обладать хорошими показателями качества. МДУ может быть выполнено на основе интегральных микросхем операционных усилителей. В качестве элемента с регулируемым коэффициентом передачи может быть использован полевой транзистор, оптоэлектронная пара с резистивным чувствительным элементом, датчик Холла, интегральный аналоговый перемножитель сигналов и т.д. Указанные достоинства заявляемого МДУ позволяют использовать его схему для разработки и промышленного изготовления в виде интегральной микросхемы дешевого и точного множительно-делительного устройства компенсационного типа. Таким образом, по сравнению с известным множительно-делительным устройством,заявляемое МДУ обладает следующими достоинствами 1. выходным сигналом МДУ является удобное для преобразований напряжение постоянного тока 2. имеется возможность умножения пульсирующего напряжения 3. замкнутая система МДУ не имеет в динамическом режиме форсирующих свойств,ухудшающих качество переходного процесса. 5626 1 Источники информации 1.., ., 1996. 2. Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов. - М. Радио и связь, 1991. - С. 60-62. 3. Тахванов Г.И. Операционные блоки автоматических управляющих устройств. - М. Энергоатомиздат, 1989. 4. Маклюков М.И., Протопопов В.А. Применение аналоговых интегральных микросхем в вычислительных устройствах. - М. Энергия, 1980. - С. 113. 5. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. - М. Машиностроение, 1973. - С. 303-350. 6. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. Под ред. Г. Гроше и В. Циглера. Перевод с немецкого. - М. Наука, 1980. С. 750. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G06G 7/16
Метки: множительно-делительное, устройство
Код ссылки
<a href="https://by.patents.su/6-5626-mnozhitelno-delitelnoe-ustrojjstvo.html" rel="bookmark" title="База патентов Беларуси">Множительно-делительное устройство</a>
Поворотно-делительное устройство
Номер патента: 1545
Опубликовано: 16.12.1996
Авторы: Прохоренко Михаил Сидорович, Кенько Виктор Михайлович, Россол Александр Иванович, Мовчан Вячеслав Иванович
МПК: B23Q 16/02
Метки: поворотно-делительное, устройство
Текст:
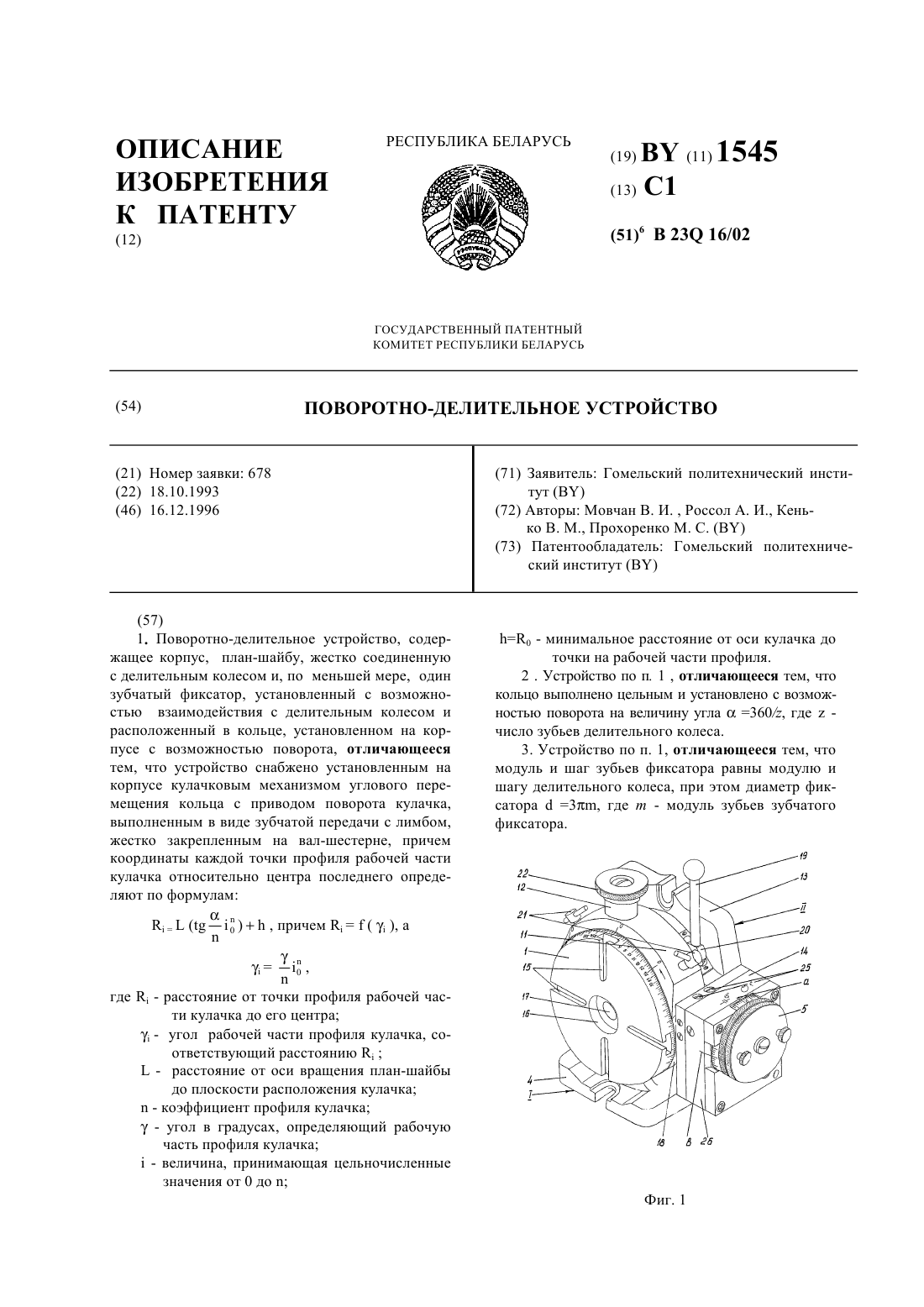
...- , как повортный стол. Полая планшайба 1 имеет на торцовой поверхности пазы 15, служащие для крепления непосредственно обрабатываемой детали или для фиксации 3 х кулачкового патрона, центрирующегося по отверстию 16. Центральное отверстие 17, расточенное на конус Морзе, служит для установки оправки или цангового патрона. Деления на периферии планшайбы 1 выполнены через . Радиальную и осевую нагрузку на планшайбу в зажатом ее положении...
Сумматор унитарных кодов по модулю три
Номер патента: 2305
Опубликовано: 30.09.1998
Авторы: Супрун Валерий Павлович, Авгуль Леонид Болеславович
МПК: G06F 7/49
Метки: кодов, три, сумматор, модулю, унитарных
Текст:
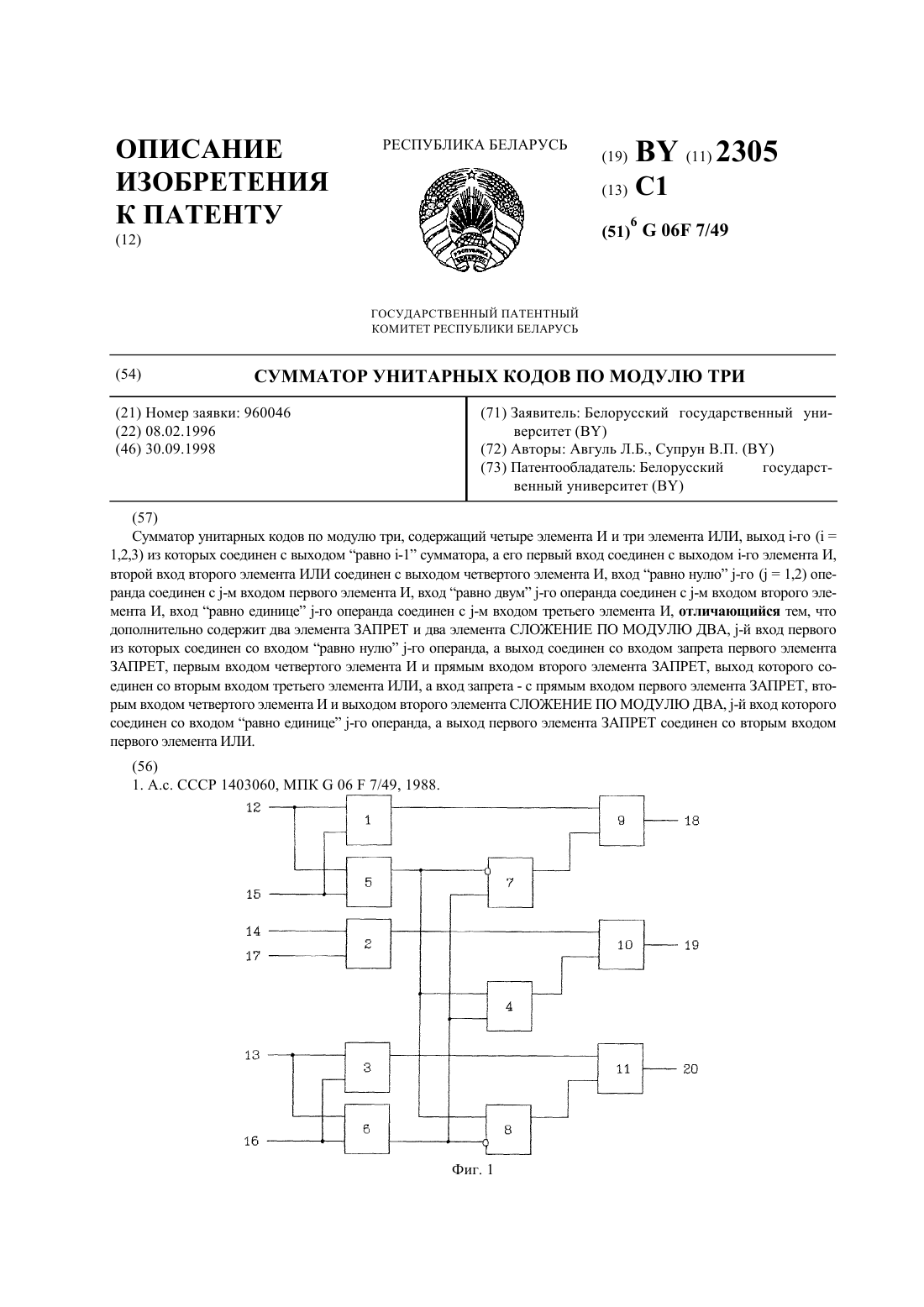
...три содержит четыре элемента И и три элемента ИЛИ. Выход -г (1, 2, 3) элемента ИЛИ соединен с выходом равно -1 сумматора, а его первый вход соединен с выходом -г элемента И. Второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, вход равно нулю-го (1, 2) операнда соединен с -м входом первого элемента И. Вход равно двум -го операнда соединен с -м входом второго элемента И, вход равно единице -го операнда соединен с -м...
Устройство формирования фокусирующего напряжения кинескопа
Номер патента: 295
Опубликовано: 30.12.1994
Авторы: Чернышов А. В., Войтенков А. С.
МПК: H04N 3/18
Метки: формирования, устройство, кинескопа, фокусирующего, напряжения
Текст:
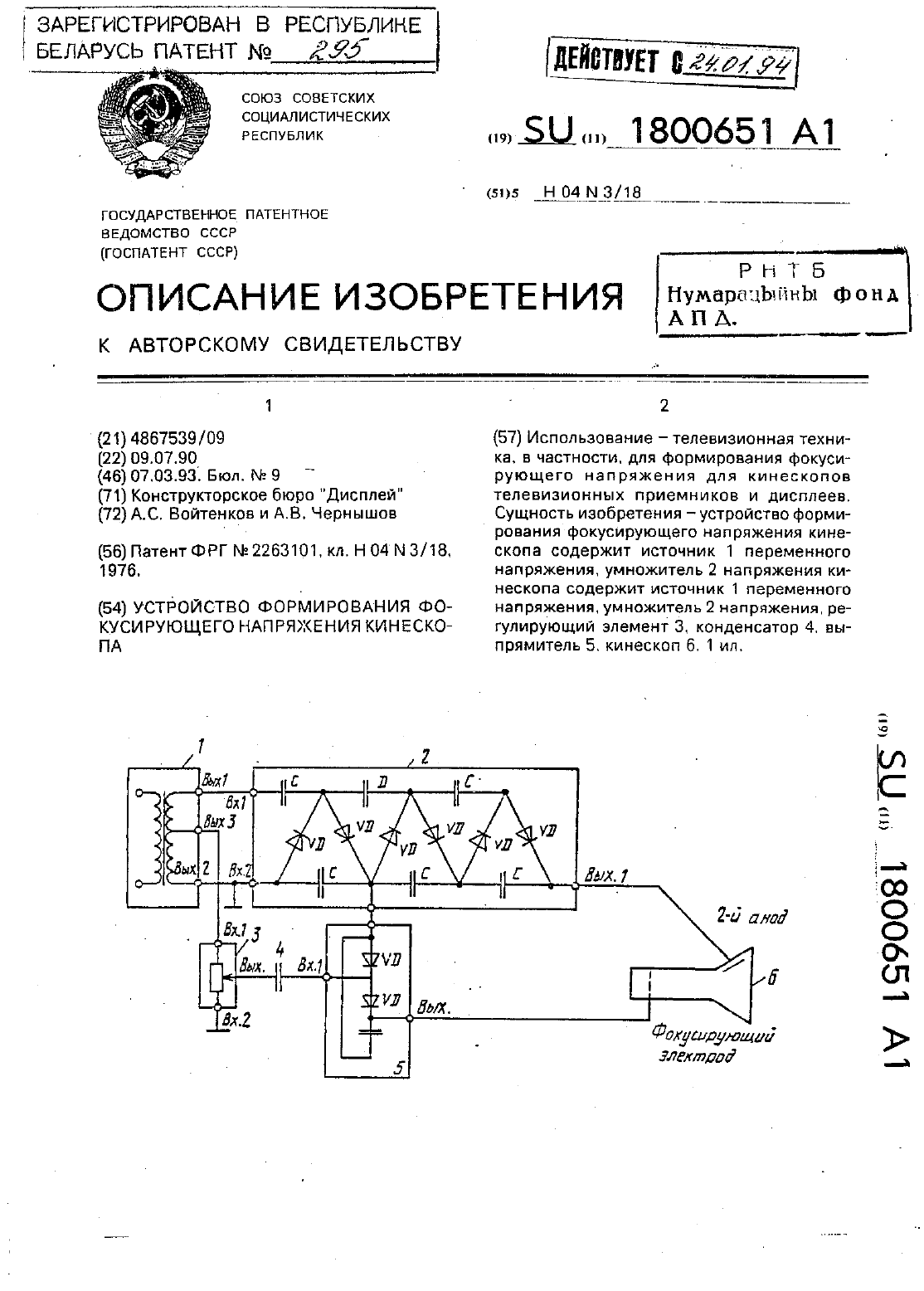
...элемент. исумножитель 2 напряжения. регулирующий ъ 5 точник переменного напряжения иумножиэлемент З. конденсатор 4. выпрямитель Б, тель напряжения, первый вход которого кинескоп б. ь соединен с первым выходом источника пе Устройство формирования фокусирую- ременного напряжения, при этом первый щего напряжения кинескопа работает сле- выход умножителя напряжения соединен с дующим образом. 20 анодом кинескопа. второй вьтход источникаВо...
Сумматор унитарных кодов по модулю три
Номер патента: 2473
Опубликовано: 30.12.1998
Авторы: Седун Андрей Максимович, Супрун Валерий Павлович
МПК: G06F 7/49
Метки: модулю, три, унитарных, кодов, сумматор
Текст:
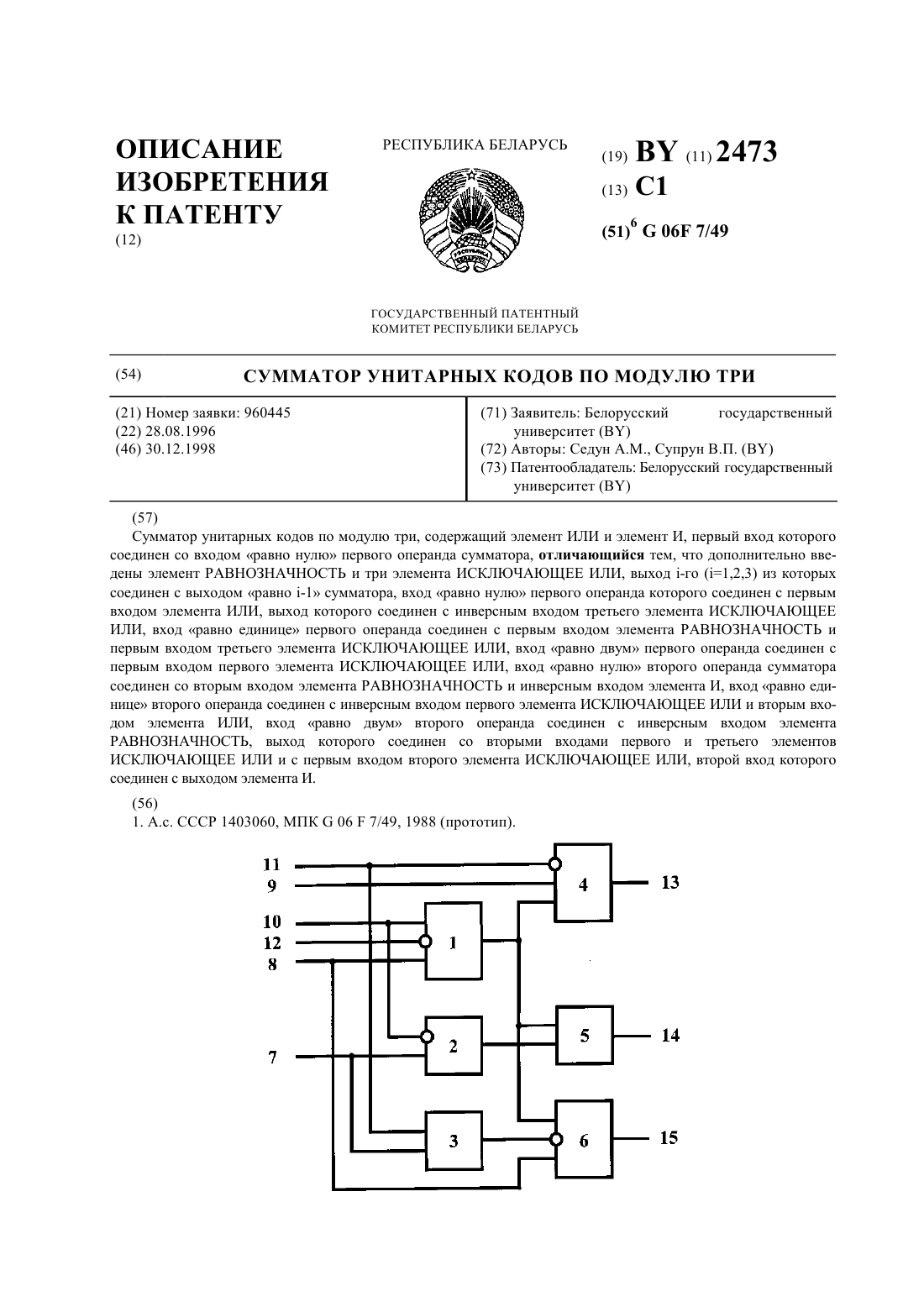
...элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход - го (1,2,3) из которых соединен с выходом равно -1 сумматора. Вход равно нулю первого операнда сумматора соединен с первым входом элемента ИЛИ, выход которого соединен с инверсным входом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Вход равно единице первого операнда соединен с первым входом элемента РАВНОЗНАЧНОСТЬ и первым входом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Вход равно двум первого операнда соединен с первым...
Устройство для управления транспортным средством

Номер патента: 4917
Опубликовано: 30.03.2003
Авторы: Яскевич Михаил Яковлевич, Курек Жанна Леонидовна, Геращенко Василий Васильевич, Жадик Александр Васильевич, Башаримова Валентина Николаевна, Миронов Константин Данилович
МПК: B60K 41/06
Метки: управления, транспортным, устройство, средством
Текст:
...решение которой обеспечивает повышение надежности и улучшение плавности хода транспортного средства при переключении передач с более высшей на низшую. 2 4917 1 Сущность изобретения заключается в том, что в устройстве для управления транспортным средством, содержащем два датчика частоты вращения, причем первый датчик частоты вращения установлен на валу двигателя внутреннего сгорания, и делитель, согласно изобретению, второй датчик частоты...
Предыдущий патент: Установка для утилизации тепла
Следующий патент: N-(5-нитротиазол-2-ил)-N1-(1,3,4-тиадиазол-2-ил)алкандиоилдиамиды, обладающие противомикробной активностью
Случайный патент: Устройство для взрывобезопасного контроля нефтяных и газовых трубопроводов (варианты)