Способ определения дальности до объекта
Текст
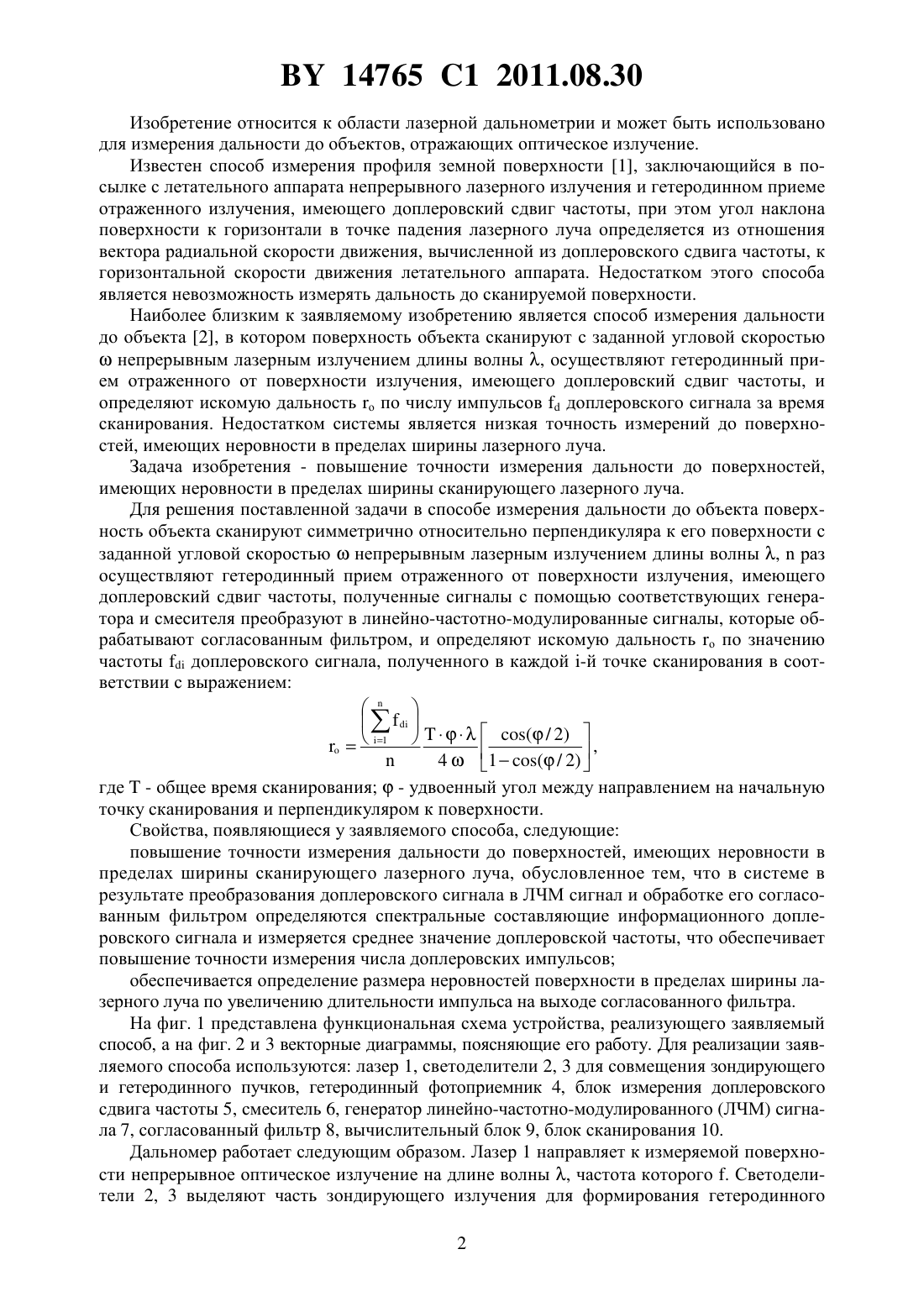
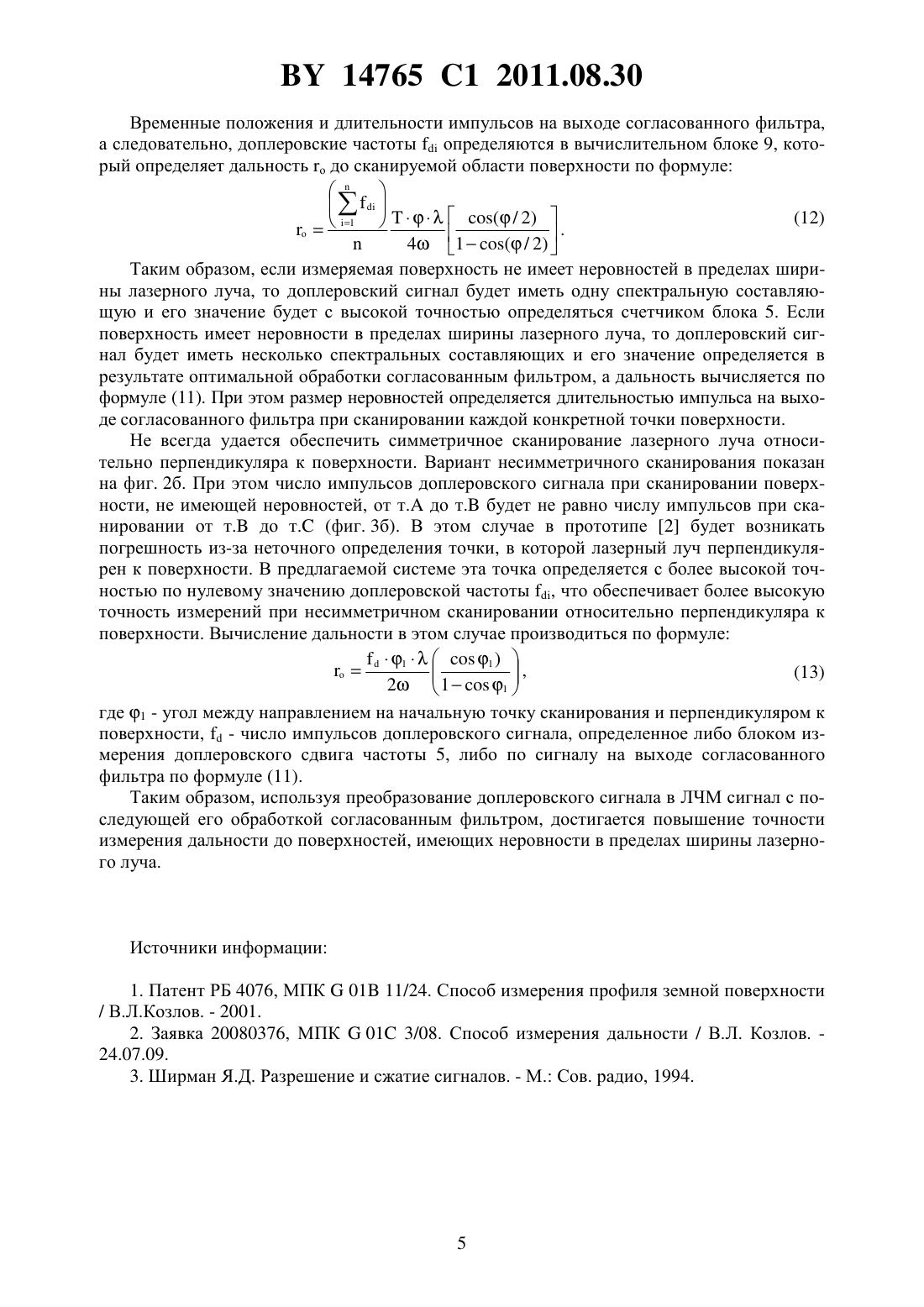
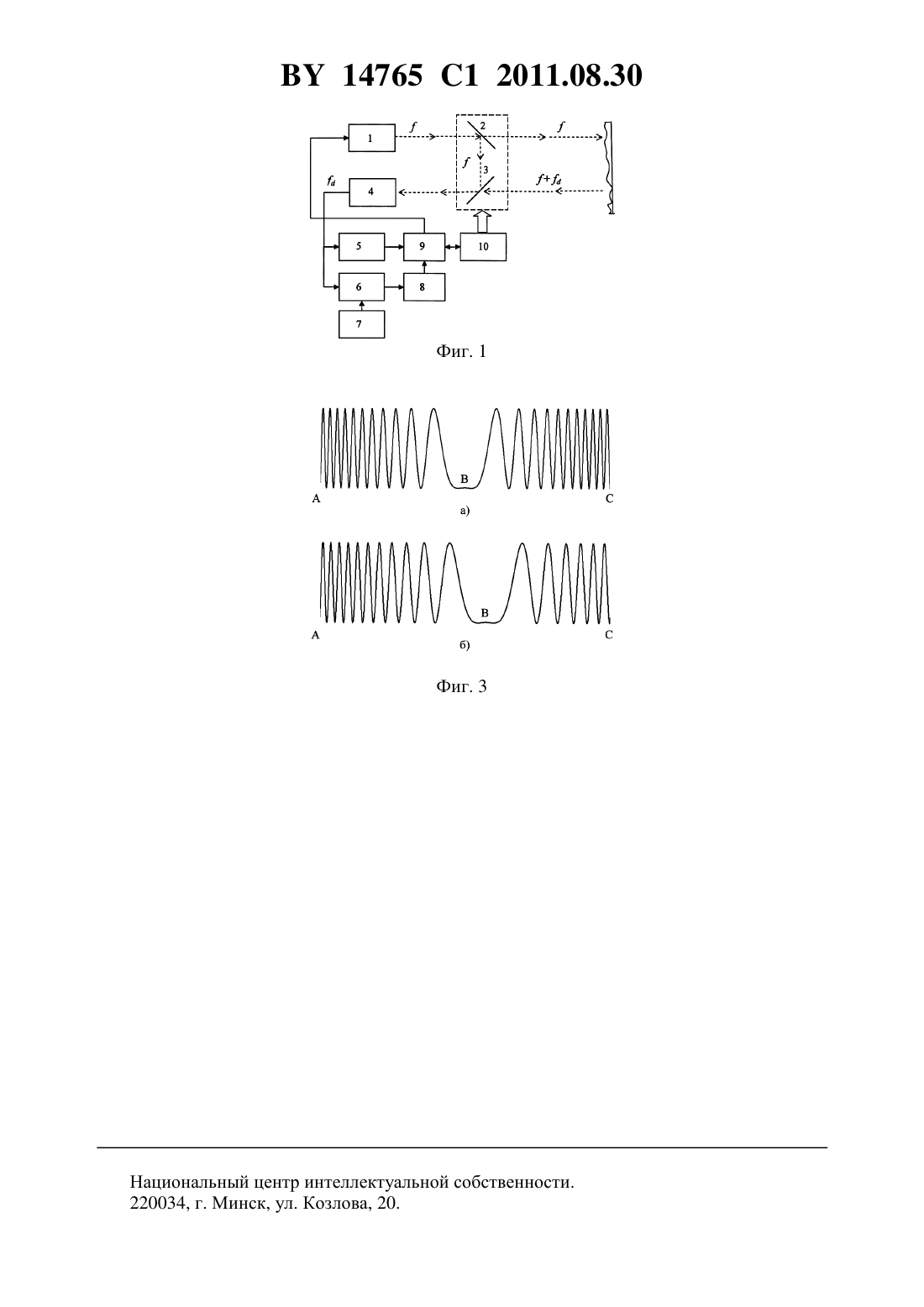
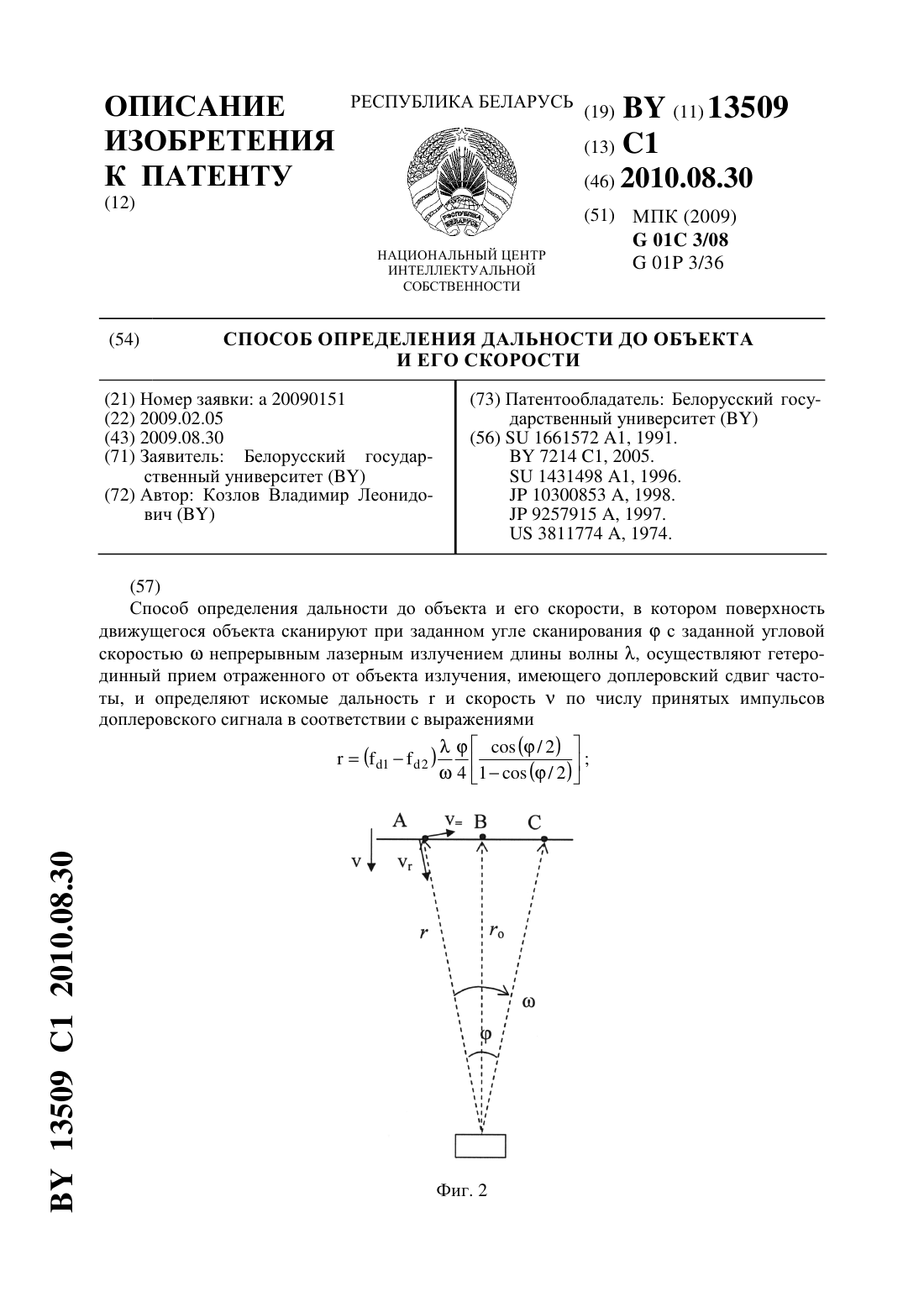
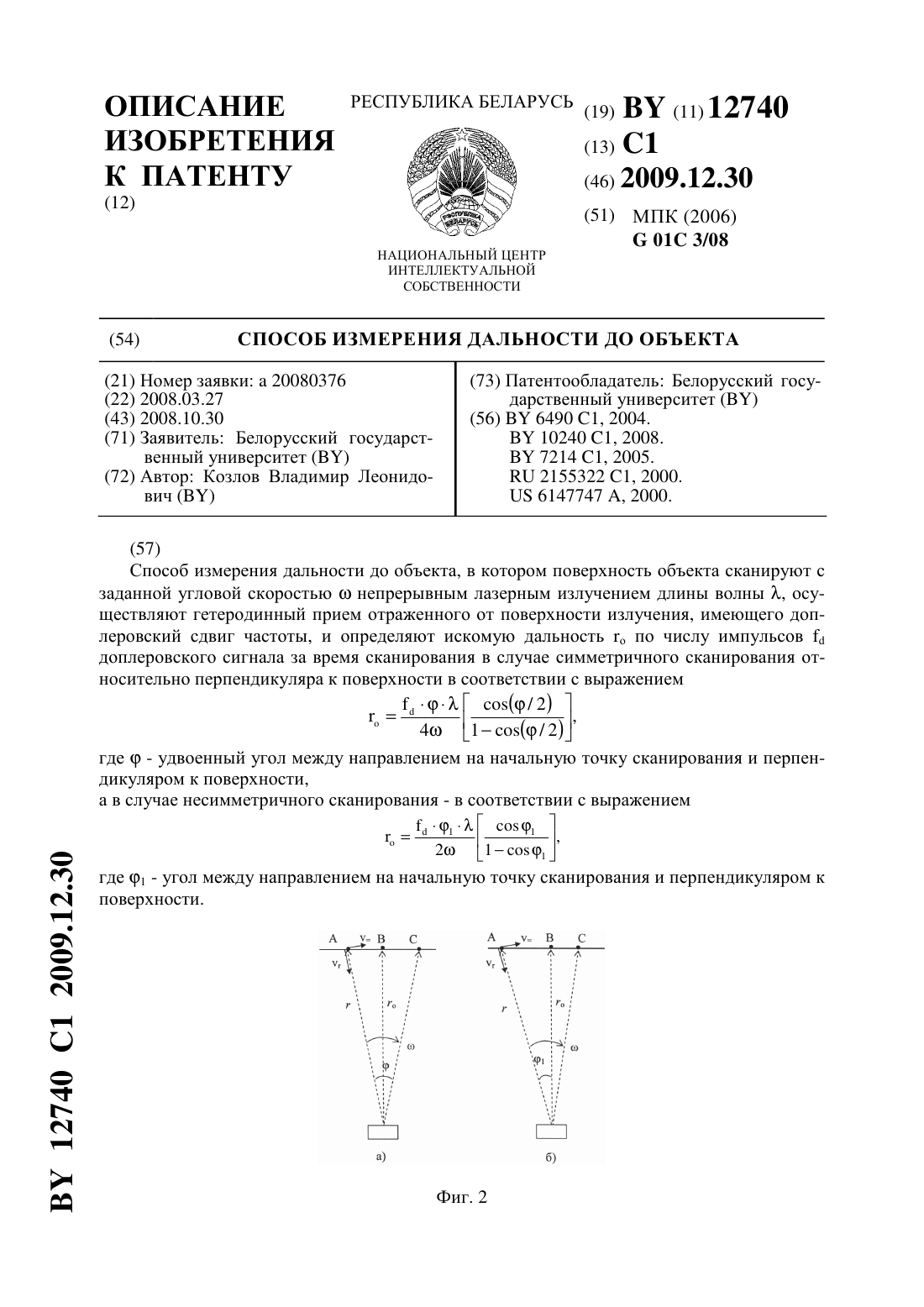
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ определения дальности до объекта, в котором поверхность объекта сканируют симметрично относительно перпендикуляра к его поверхности с заданной угловой скоростьюнепрерывным лазерным излучением длины волны ,раз осуществляют гетеродинный прием отраженного от поверхности излучения, имеющего доплеровский сдвиг частоты, полученные сигналы с помощью соответствующих генератора и смесителя преобразуют в линейно-частотно-модулированные сигналы, которые обрабатывают согласованным фильтром, и определяют искомую дальностьпо значению частотыдоплеровского сигнала, полученного в каждой -й точке сканирования, в соответствии с выражением где- общее время сканирования- удвоенный угол между направлением на начальную точку сканирования и перпендикуляром к поверхности объекта. 14765 1 2011.08.30 Изобретение относится к области лазерной дальнометрии и может быть использовано для измерения дальности до объектов, отражающих оптическое излучение. Известен способ измерения профиля земной поверхности 1, заключающийся в посылке с летательного аппарата непрерывного лазерного излучения и гетеродинном приеме отраженного излучения, имеющего доплеровский сдвиг частоты, при этом угол наклона поверхности к горизонтали в точке падения лазерного луча определяется из отношения вектора радиальной скорости движения, вычисленной из доплеровского сдвига частоты, к горизонтальной скорости движения летательного аппарата. Недостатком этого способа является невозможность измерять дальность до сканируемой поверхности. Наиболее близким к заявляемому изобретению является способ измерения дальности до объекта 2, в котором поверхность объекта сканируют с заданной угловой скоростьюнепрерывным лазерным излучением длины волны , осуществляют гетеродинный прием отраженного от поверхности излучения, имеющего доплеровский сдвиг частоты, и определяют искомую дальность о по числу импульсовдоплеровского сигнала за время сканирования. Недостатком системы является низкая точность измерений до поверхностей, имеющих неровности в пределах ширины лазерного луча. Задача изобретения - повышение точности измерения дальности до поверхностей,имеющих неровности в пределах ширины сканирующего лазерного луча. Для решения поставленной задачи в способе измерения дальности до объекта поверхность объекта сканируют симметрично относительно перпендикуляра к его поверхности с заданной угловой скоростьюнепрерывным лазерным излучением длины волны ,раз осуществляют гетеродинный прием отраженного от поверхности излучения, имеющего доплеровский сдвиг частоты, полученные сигналы с помощью соответствующих генератора и смесителя преобразуют в линейно-частотно-модулированные сигналы, которые обрабатывают согласованным фильтром, и определяют искомую дальность о по значению частотыдоплеровского сигнала, полученного в каждой -й точке сканирования в соответствии с выражением где- общее время сканирования- удвоенный угол между направлением на начальную точку сканирования и перпендикуляром к поверхности. Свойства, появляющиеся у заявляемого способа, следующие повышение точности измерения дальности до поверхностей, имеющих неровности в пределах ширины сканирующего лазерного луча, обусловленное тем, что в системе в результате преобразования доплеровского сигнала в ЛЧМ сигнал и обработке его согласованным фильтром определяются спектральные составляющие информационного доплеровского сигнала и измеряется среднее значение доплеровской частоты, что обеспечивает повышение точности измерения числа доплеровских импульсов обеспечивается определение размера неровностей поверхности в пределах ширины лазерного луча по увеличению длительности импульса на выходе согласованного фильтра. На фиг. 1 представлена функциональная схема устройства, реализующего заявляемый способ, а на фиг. 2 и 3 векторные диаграммы, поясняющие его работу. Для реализации заявляемого способа используются лазер 1, светоделители 2, 3 для совмещения зондирующего и гетеродинного пучков, гетеродинный фотоприемник 4, блок измерения доплеровского сдвига частоты 5, смеситель 6, генератор линейно-частотно-модулированного (ЛЧМ) сигнала 7, согласованный фильтр 8, вычислительный блок 9, блок сканирования 10. Дальномер работает следующим образом. Лазер 1 направляет к измеряемой поверхности непрерывное оптическое излучение на длине волны , частота которого . Светоделители 2, 3 выделяют часть зондирующего излучения для формирования гетеродинного 2 14765 1 2011.08.30 оптического сигнала. Блок сканирования 10 осуществляет сканирование лучом лазера заданной поверхности в углес угловой скоростью , как показано на фиг. 2 а, б. Отраженное от поверхности оптическое излучение сдвигается по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,скорость света,- длина волны излучения, /2 - угол между лазерным лучом и перпендикуляром к поверхности. Отраженное оптическое излучение, имеющее доплеровский сдвиг частоты, с помощью светоделителя 3 совмещается с гетеродинным излучением и попадает фотоприемник 4. В результате фотогетеродинирования на фотоприемнике выделяется сигнал разностной частоты , величина которого выражается формулой (1). Очевидно, что в процессе сканирования поверхности лазерным лучом, расстояние от лазера до точки падения лазерного лучабудет изменяться в соответствии выражением/( / 2) ,(2) где о - расстояние от лазера до сканируемой поверхности (фиг. 2). Из (1), (2) выражение для мгновенного значения доплеровского сдвига частоты, регистрируемого блоком 5, будет иметь вид( / 2)2(3)( / 2) Выражение (3) показывает максимальное значение доплеровского сдвига частоты, когда угол /2 между лазерным лучом и перпендикуляром к поверхности имеет максимальное значение. Если лазерный луч направляется перпендикулярно к поверхности, то(/2)0, следовательно, доплеровский сдвиг будет равен нулю. Диаграмма изменения доплеровского сигнала при сканировании поверхности, не имеющей неровностей, представлена на фиг. 3 а. В начале сканирования т. (фиг. 2 а), когда угол /2 имеет максимальное значение, доплеровская частота максимальная. Затем в процессе сканирования доплеровская частота постепенно уменьшается, достигает нулевого значения в т., когда угол равен нулю, и возрастает при увеличении угла т. (фиг. 3 а). Среднее значение числа импульсов доплеровского сигнала за все время сканирования в углес угловой скоростьюможно определить следующим образом Счетчик блока 5 измеряет число импульсов доплеровского сигнала, и его величина поступает в вычислительный блок 9, где определяется дальность о до сканируемой области пространства поверхности по формуле( / 2) где- угловая скорость сканирования поверхности,- длина волны зондирующего излучения,- число импульсов доплеровского сигнала за время сканирования,- угол сканирования. 14765 1 2011.08.30 Описанный алгоритм измерений будет эффективно работать, если измеряемая поверхность не имеет неровностей или их размеры больше ширины лазерного луча. При измерениях дальности до поверхностей, имеющих неровности, меньшие ширины лазерного луча, будут возникать погрешности измерения, обусловленные тем, что различные части сканирующего лазерного луча будут иметь различные доплеровские сдвиги частоты в зависимости от размера неровности поверхности в пределах ширины лазерного луча. Для измерения частоты и спектра такого доплеровского сигнала используется преобразование доплеровского сигнала с помощью смесителя и ЛЧМ генератора в линейно-частотномодулированный сигнал с последующей обработкой его согласованным фильтром. При этом временное положение импульса на выходе согласованного фильтра характеризует частоту доплеровского сигнала 3. Это осуществляется следующим образом. Пусть измеряемый доплеровский сигнал имеет нормированную амплитуду,где 2. Нормированный сигнал ЛЧМ генератора 7 выражается формулойЛЧМ , 0,(7) где о - начальная частота ЛЧМ сигнала,/ - скорость изменения частоты ЛЧМ сигнала, ,- длительность и девиация частоты ЛЧМ сигнала. В смесителе 6 происходит перемножение входной доплеровской частотыи сигнала (7),и результирующий сигнал определяется выражением.(8) На выходе согласованного фильтра появляется сигнал, который можно определить с помощью операции где- импульсная характеристика согласованного фильтра, представляющая собой обращенную во времени функцию сигнала генератора ЛЧМ. После прохождения сигнала (8) через согласованный фильтр на его выходе появится сигнал вида 2( Как следует из формулы, временное положение сжатого импульса на выходе согласованного фильтра определяется частотой доплеровского сигнала 2. Если в результате отражения от неровностей поверхности в пределах ширины сканирующего лазерного луча будут присутствовать несколько различных доплеровских сдвигов частоты 1, 2, , то на выходе согласованного фильтра будет несколько сжатых импульсов с различным временным положением. Так как ширина сканирующего лазерного луча достаточно мала (единицы миллиметров и менее), то величины доплеровских сдвигов частоты 1, 2, будут незначительно различаться, следовательно, импульсы на выходе согласованного фильтра будут перекрываться, что фактически означает уширение результирующего выходного импульса. При этом средняя дальность до поверхности, имеющей неровности, определяется средним значением доплеровской частотыза время сканирования(11)1, где- время сканирования,- среднее значение частоты доплеровского сигнала в -й точке сканируемой поверхности за один период перестройки ЛЧМ сигнала,- число измеренийза время сканирования. 14765 1 2011.08.30 Временные положения и длительности импульсов на выходе согласованного фильтра,а следовательно, доплеровские частотыопределяются в вычислительном блоке 9, который определяет дальность о до сканируемой области поверхности по формуле Таким образом, если измеряемая поверхность не имеет неровностей в пределах ширины лазерного луча, то доплеровский сигнал будет иметь одну спектральную составляющую и его значение будет с высокой точностью определяться счетчиком блока 5. Если поверхность имеет неровности в пределах ширины лазерного луча, то доплеровский сигнал будет иметь несколько спектральных составляющих и его значение определяется в результате оптимальной обработки согласованным фильтром, а дальность вычисляется по формуле (11). При этом размер неровностей определяется длительностью импульса на выходе согласованного фильтра при сканировании каждой конкретной точки поверхности. Не всегда удается обеспечить симметричное сканирование лазерного луча относительно перпендикуляра к поверхности. Вариант несимметричного сканирования показан на фиг. 2 б. При этом число импульсов доплеровского сигнала при сканировании поверхности, не имеющей неровностей, от т. до т. будет не равно числу импульсов при сканировании от т. до т. (фиг. 3 б). В этом случае в прототипе 2 будет возникать погрешность из-за неточного определения точки, в которой лазерный луч перпендикулярен к поверхности. В предлагаемой системе эта точка определяется с более высокой точностью по нулевому значению доплеровской частоты , что обеспечивает более высокую точность измерений при несимметричном сканировании относительно перпендикуляра к поверхности. Вычисление дальности в этом случае производиться по формуле 11 ) где 1 - угол между направлением на начальную точку сканирования и перпендикуляром к поверхности,- число импульсов доплеровского сигнала, определенное либо блоком измерения доплеровского сдвига частоты 5, либо по сигналу на выходе согласованного фильтра по формуле (11). Таким образом, используя преобразование доплеровского сигнала в ЛЧМ сигнал с последующей его обработкой согласованным фильтром, достигается повышение точности измерения дальности до поверхностей, имеющих неровности в пределах ширины лазерного луча. 1. Патент РБ 4076, МПК 01 11/24. Способ измерения профиля земной поверхности/ В.Л.Козлов. - 2001. 2. Заявка 20080376, МПК 01 3/08. Способ измерения дальности / В.Л. Козлов. 24.07.09. 3. Ширман Я.Д. Разрешение и сжатие сигналов. - М. Сов. радио, 1994. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01C 3/08
Метки: способ, определения, дальности, объекта
Код ссылки
<a href="https://by.patents.su/6-14765-sposob-opredeleniya-dalnosti-do-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ определения дальности до объекта</a>
Способ определения дальности до объекта и его скорости
Номер патента: 13509
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
Метки: способ, скорости, определения, объекта, дальности
Текст:
...неподвижна, поэтому отраженное от поверхности оптическое излучение будет сдвигаться по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , обусловленную только сканированием поверхности лазерным лучом, мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,скорость света,- длина волны...
Способ измерения дальности до объекта
Номер патента: 12740
Опубликовано: 30.12.2009
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: способ, измерения, объекта, дальности
Текст:
...на доплеровскую частоту , мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования,- расстояние до точки падения лазерного луча,- угловая скорость сканирования, с - скорость света,- длина волны зондирующего излучения, /2 - угол между лазерным лучом и перпендикуляром к поверхности (фиг. 2). Отраженное оптическое излучение, имеющее доплеровский сдвиг частоты, с помощью светоделителя 3...
Способ определения дальности до объекта и его скорости
Номер патента: 11960
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08, G01P 3/36, G01S 17/00...
Метки: объекта, скорости, способ, дальности, определения
Текст:
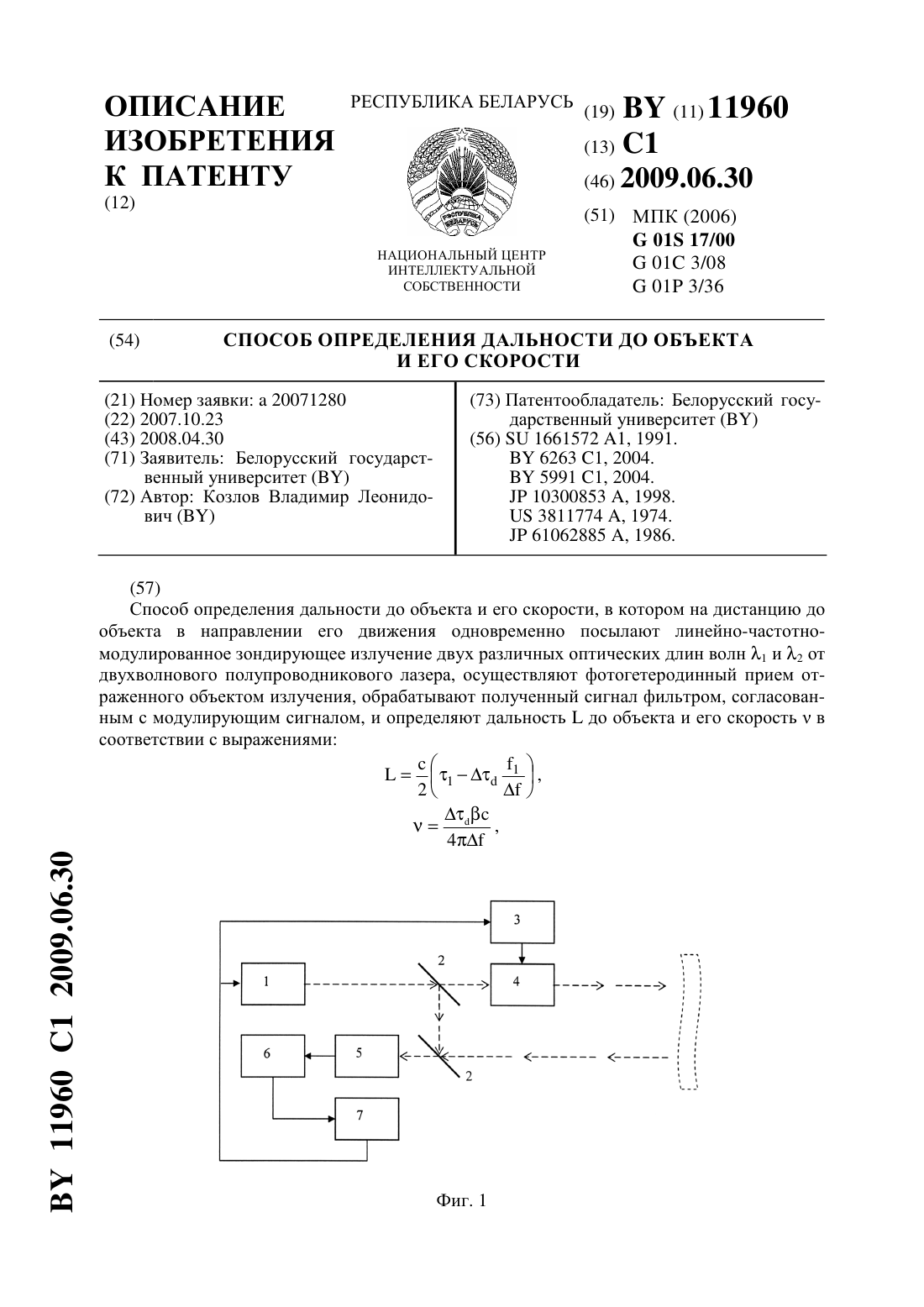
...Для обеспечения возможности одновременного определения за один зондирующий импульс дальности и скорости объекта в качестве источника зондирующего излучения предлагается использовать двухволновой инжекционный полупроводниковый лазер 2,обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных диодов 3 достигает значений 20-100 нм....
Способ определения дальности до объекта
Номер патента: 13549
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: объекта, определения, способ, дальности
Текст:
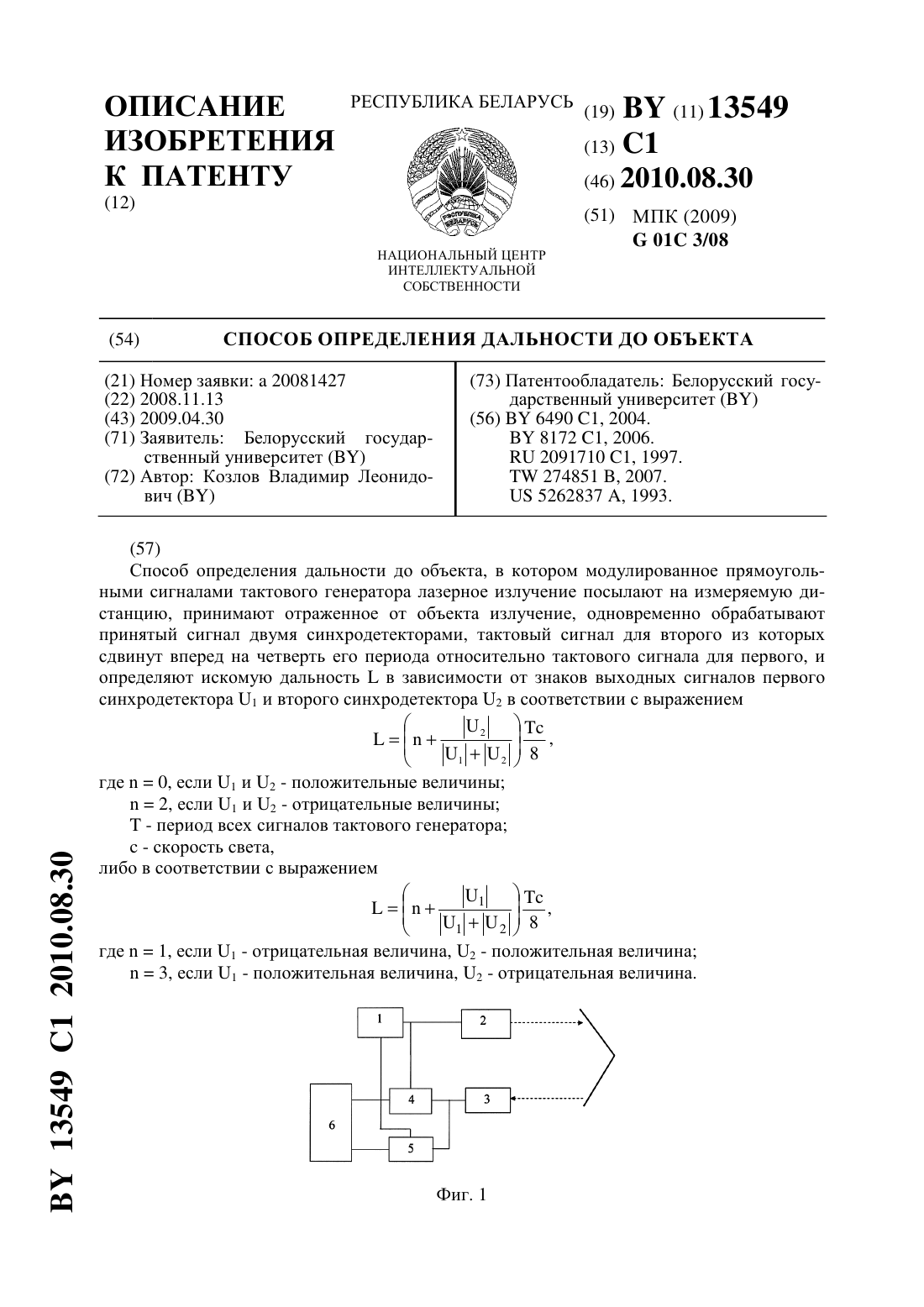
...а на фиг. 2 - графические материалы, поясняющие его работу. Для реализации заявляемого способа используются тактовый генератор 1, лазер 2, фотоприемник 3, первый синхродетектор 4, второй синхродетектор 5, вычислительный блок 6. Принцип измерения основан на фазовом способе измерения дальности, в котором фаза оптического сигнала, прошедшего измеряемое расстояние, сравнивается с фазой сигнала тактового генератора. При этом полагается, что...
Способ измерения дальности до объекта посредством двухволнового лазера
Номер патента: 11972
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: объекта, измерения, лазера, дальности, двухволнового, способ, посредством
Текст:
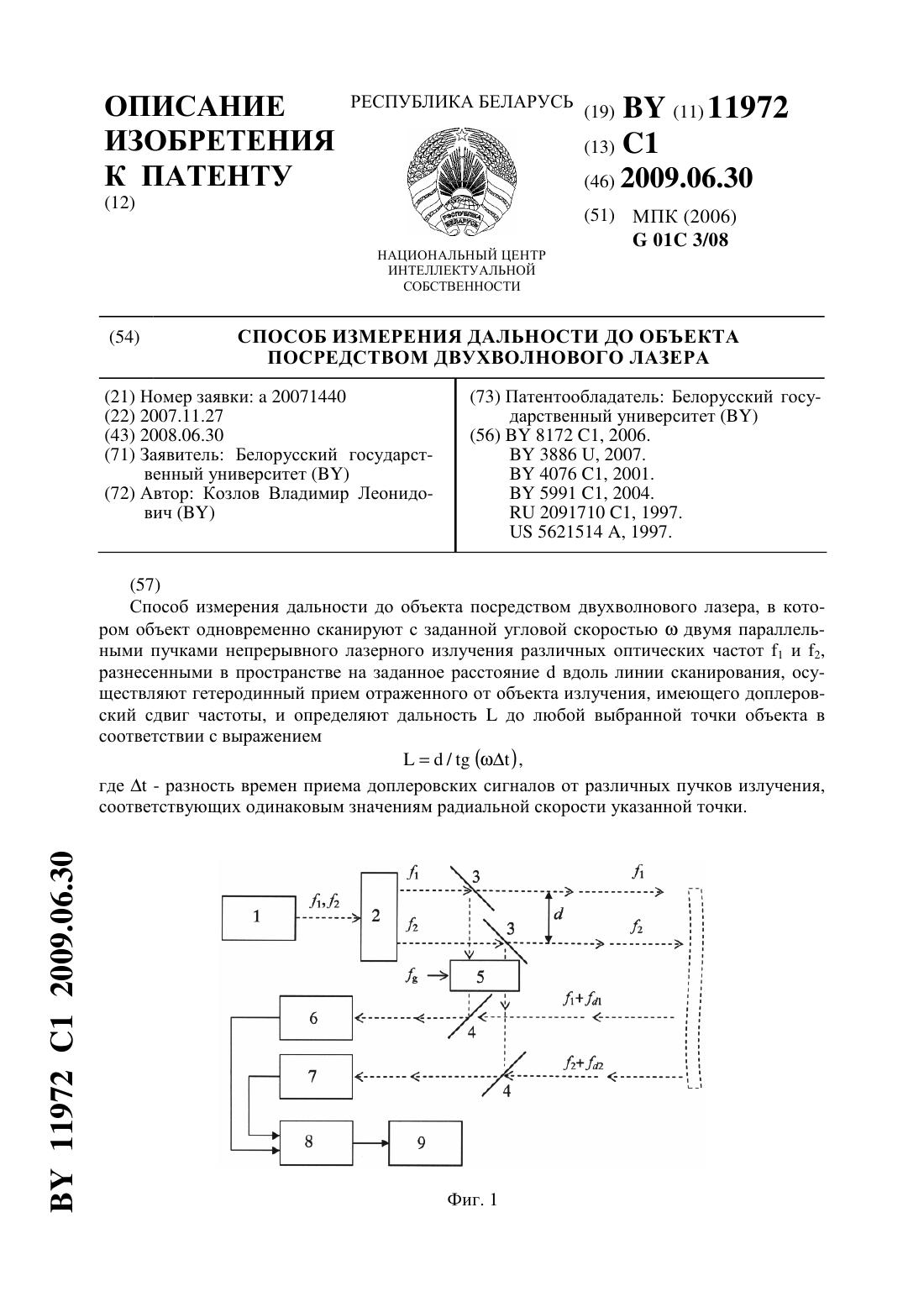
...излучение на частоте 1, в другом - на частоте 2. Светоделители 3 выделяют часть зондирующего излучения для формирования гетеродинного оптического сигнала на частотах 1 и 2, которые после прохождения блока частотного сдвига 5 (построенного, например, с использованием акустооптического модулятора) сдвигаются по частоте на . Таким образом, на дистанцию посылают два параллельных зондирующих луча на частотах 1 и 2, сдвинутых в пространстве...
Предыдущий патент: Устройство для вычисления полиномиальных симметрических булевых функций одиннадцати переменных
Следующий патент: Концентрат смазочно-охлаждающего технологического средства для магнитно-абразивной обработки стали
Случайный патент: Замковое устройство механизма запирания полуформ литьевой машины, например, термопластавтомата