Способ определения дальности до объекта и его скорости

Текст
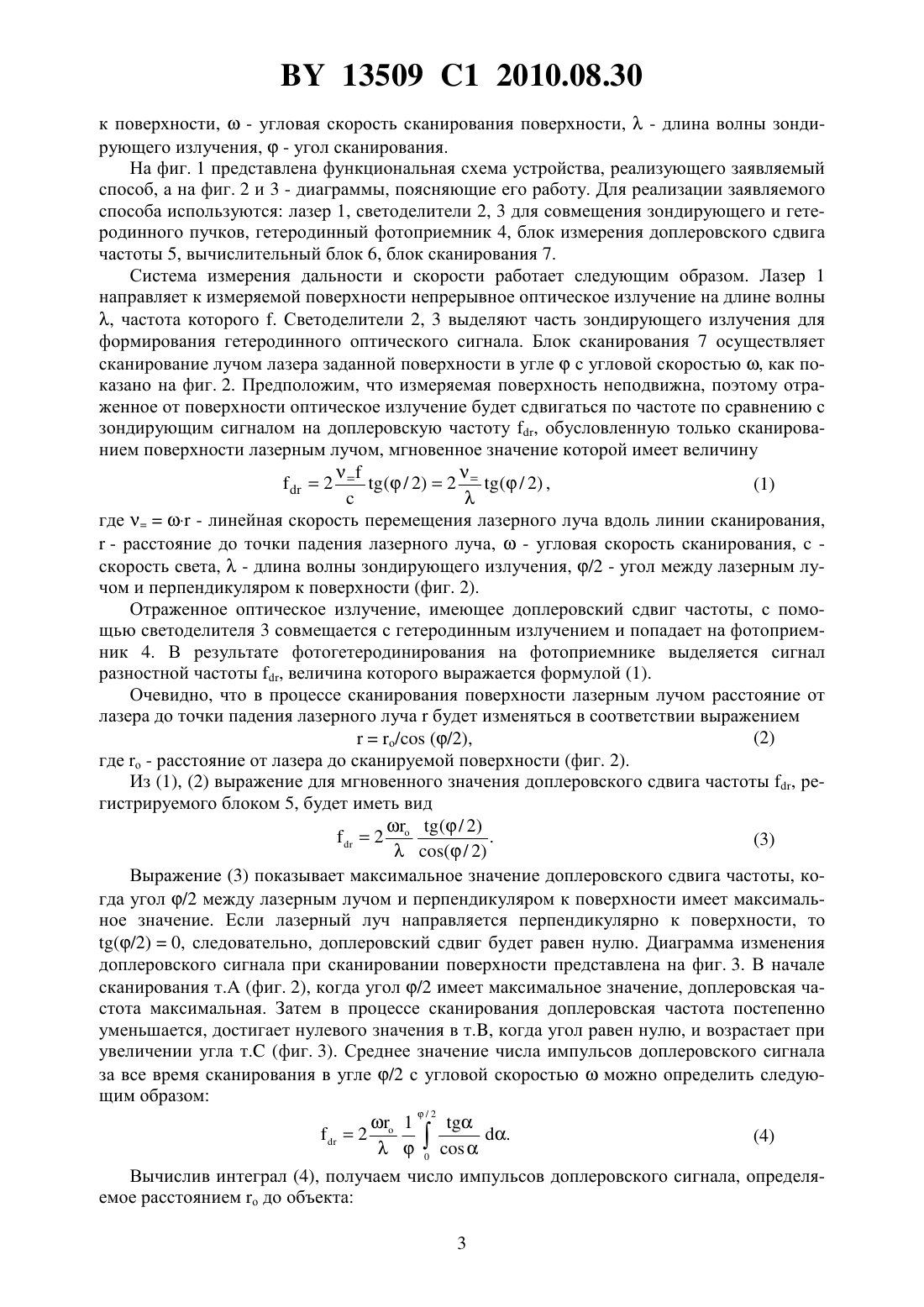
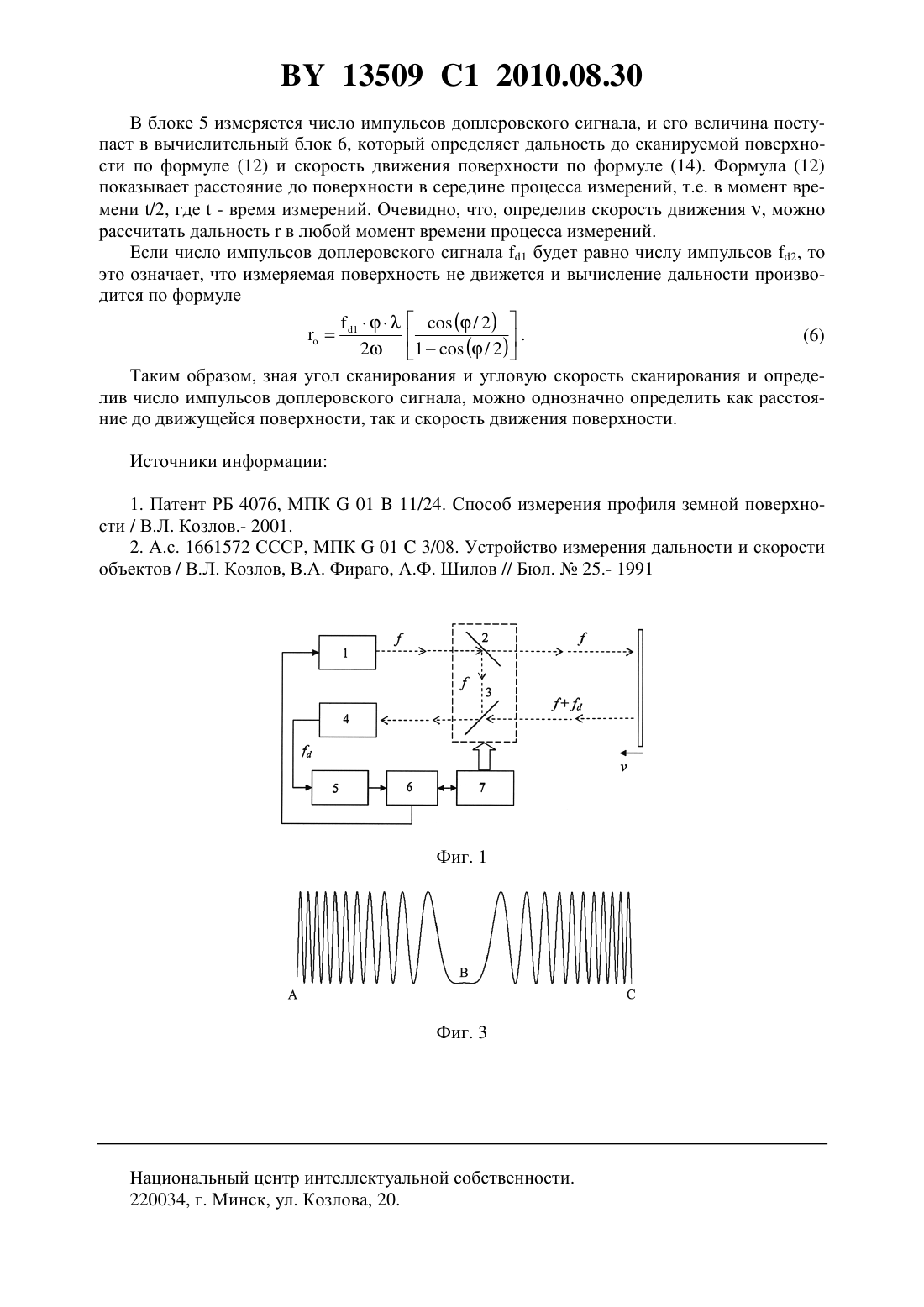
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА И ЕГО СКОРОСТИ(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ определения дальности до объекта и его скорости, в котором поверхность движущегося объекта сканируют при заданном угле сканированияс заданной угловой скоростьюнепрерывным лазерным излучением длины волны , осуществляют гетеродинный прием отраженного от объекта излучения, имеющего доплеровский сдвиг частоты, и определяют искомые дальностьи скоростьпо числу принятых импульсов доплеровского сигнала в соответствии с выражениями( / 2)( 12 ) где 1 и 2 - число импульсов доплеровского сигнала за время сканирования поверхности в угле от /2 до 0 и от 0 до /2 относительно перпендикуляра к поверхности объекта соответственно. Изобретение относится к области лазерной дальнометрии и локационной технике и может быть использовано для измерения дальности и скорости движения объектов, отражающих оптическое излучение, а также для ориентирования роботов в пространстве, для измерения небольших расстояний с высокой точностью, например, в технологических процессах и т.п. Известен способ измерения профиля земной поверхности 1, заключающийся в посылке с летательного аппарата непрерывного лазерного излучения и гетеродинном приеме отраженного излучения, имеющего доплеровский сдвиг частоты, при этом угол наклона поверхности к горизонтали в точке падения лазерного луча определяется из отношения вектора радиальной скорости движения, вычисленной из доплеровского сдвига частоты к горизонтальной скорости движения летательного аппарата затем по величине угла наклона в каждой точке поверхности восстанавливается полный профиль поверхности по линии движения. Недостатком этого способа является невозможность измерять дальность до сканируемой поверхности. Наиболее близким к заявляемому изобретению является способ измерения дальности и скорости объекта 2, основанный на внешней пилообразной линейной частотной модуляции (ЛЧМ) лазерного зондирующего излучения с последующим фотогетеродинным приемом отраженного от объекта излучения и обработкой полученного сигнала при помощи двух фильтров, согласованных с ЛЧМ сигналами, имеющими противоположные значения крутизны перестройки частоты. По временному положению импульсов на выходах согласованных фильтров рассчитываются дальность и скорость. Недостатками этого способа являются невысокая точность измерения дальности и сложность конструкции. Задача изобретения - повышение точности измерения дальности до движущихся поверхностей и упрощение конструкции системы. Решение поставленной задачи позволит использовать предлагаемое изобретение для измерения небольших расстояний с высокой точностью до движущихся поверхностей, например для ориентирования движущихся роботов в пространстве, в производственных технологических процессах и т.п. Для решения поставленной задачи в известном способе определения дальности до объекта и его скорости, заключающемся в сканировании движущейся поверхности с известной угловой скоростью непрерывным лазерным излучением и гетеродинном приеме отраженного излучения, имеющего доплеровский сдвиг частоты, дальность и скорость до движущейся поверхности определяют по числу импульсов доплеровского сигнала в соответствии с выражениями где 1 - число импульсов доплеровского сигнала за время сканирования поверхности в угле от /2 до 0 относительно перпендикуляра к поверхности, 2 - число импульсов доплеровского сигнала за время сканирования в угле от 0 до -/2 относительно перпендикуляра( 12 ) 13509 1 2010.08.30 к поверхности,- угловая скорость сканирования поверхности,- длина волны зондирующего излучения,- угол сканирования. На фиг. 1 представлена функциональная схема устройства, реализующего заявляемый способ, а на фиг. 2 и 3 - диаграммы, поясняющие его работу. Для реализации заявляемого способа используются лазер 1, светоделители 2, 3 для совмещения зондирующего и гетеродинного пучков, гетеродинный фотоприемник 4, блок измерения доплеровского сдвига частоты 5, вычислительный блок 6, блок сканирования 7. Система измерения дальности и скорости работает следующим образом. Лазер 1 направляет к измеряемой поверхности непрерывное оптическое излучение на длине волны, частота которого . Светоделители 2, 3 выделяют часть зондирующего излучения для формирования гетеродинного оптического сигнала. Блок сканирования 7 осуществляет сканирование лучом лазера заданной поверхности в углес угловой скоростью , как показано на фиг. 2. Предположим, что измеряемая поверхность неподвижна, поэтому отраженное от поверхности оптическое излучение будет сдвигаться по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , обусловленную только сканированием поверхности лазерным лучом, мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,скорость света,- длина волны зондирующего излучения, /2 - угол между лазерным лучом и перпендикуляром к поверхности (фиг. 2). Отраженное оптическое излучение, имеющее доплеровский сдвиг частоты, с помощью светоделителя 3 совмещается с гетеродинным излучением и попадает на фотоприемник 4. В результате фотогетеродинирования на фотоприемнике выделяется сигнал разностной частоты , величина которого выражается формулой (1). Очевидно, что в процессе сканирования поверхности лазерным лучом расстояние от лазера до точки падения лазерного лучабудет изменяться в соответствии выражением(2)о/ (/2),где о - расстояние от лазера до сканируемой поверхности (фиг. 2). Из (1), (2) выражение для мгновенного значения доплеровского сдвига частоты , регистрируемого блоком 5, будет иметь вид( / 2)2(3)( / 2) Выражение (3) показывает максимальное значение доплеровского сдвига частоты, когда угол /2 между лазерным лучом и перпендикуляром к поверхности имеет максимальное значение. Если лазерный луч направляется перпендикулярно к поверхности, то(/2)0, следовательно, доплеровский сдвиг будет равен нулю. Диаграмма изменения доплеровского сигнала при сканировании поверхности представлена на фиг. 3. В начале сканирования т. (фиг. 2), когда угол /2 имеет максимальное значение, доплеровская частота максимальная. Затем в процессе сканирования доплеровская частота постепенно уменьшается, достигает нулевого значения в т., когда угол равен нулю, и возрастает при увеличении угла т. (фиг. 3). Среднее значение числа импульсов доплеровского сигнала за все время сканирования в угле /2 с угловой скоростьюможно определить следующим образом(4).0 Вычислив интеграл (4), получаем число импульсов доплеровского сигнала, определяемое расстоянием о до объекта Теперь предположим, что измеряемая поверхность движется. Очевидно, что в этом случае к доплеровскому сдвигу за счет сканирования поверхности лазерным лучам прибавляется дополнительный сигнал доплеровской частоты , обусловленный движением измеряемой поверхности, равный где- длина волны излучения лазера,-скорость движения поверхности,- угол между направлением движения и направлением лазерного луча. Так как лазерный луч осуществляет симметричное сканирование относительно перпендикуляра к поверхности в угле /2, обусловленное этим число импульсов доплеровского сигналаза половину угла сканирования будет равно При определении числа импульсов доплеровского сигнала по формуле (5) расстояние до поверхности о в этой формуле будет изменяться в соответствии с выражением(8)о - ,где о - расстояние до поверхности в начале измерений,- время измерений. Таким образом, суммарное число импульсов доплеровского сигнала 1, обусловленное движением измеряемой поверхности и сканированием лазерного луча по измеряемой поверхности в угле от /2 до 0 (фиг. 2 - сканирование от т. к т.) будет равно Суммарное число импульсов доплеровского сигнала 2, обусловленное движением измеряемой поверхности и сканированием лазерного луча по измеряемой поверхности в угле от 0 до -/2 (фиг. 2 - сканирование от т. к т.) будет равно Величинао - /2 представляет собой расстояние до поверхности в середине процесса измерений, т.е. среднее значение расстояния за все время измерений. Таким образом, из (11) расстояние до поверхности будет равно( / 2)( 12 ) Для определения скоростисложим формулы (9) и (10)1 1( / 2) Учитывая, что время сканирования равно/, получаем скорость движения поверхности 13509 1 2010.08.30 В блоке 5 измеряется число импульсов доплеровского сигнала, и его величина поступает в вычислительный блок 6, который определяет дальность до сканируемой поверхности по формуле (12) и скорость движения поверхности по формуле (14). Формула (12) показывает расстояние до поверхности в середине процесса измерений, т.е. в момент времени /2, где- время измерений. Очевидно, что, определив скорость движения , можно рассчитать дальностьв любой момент времени процесса измерений. Если число импульсов доплеровского сигнала 1 будет равно числу импульсов 2, то это означает, что измеряемая поверхность не движется и вычисление дальности производится по формуле( / 2)1 Таким образом, зная угол сканирования и угловую скорость сканирования и определив число импульсов доплеровского сигнала, можно однозначно определить как расстояние до движущейся поверхности, так и скорость движения поверхности. Источники информации 1. Патент РБ 4076, МПК 0111/24. Способ измерения профиля земной поверхности / В.Л. Козлов.- 2001. 2. А.с. 1661572 СССР, МПК 013/08. Устройство измерения дальности и скорости объектов / В.Л. Козлов, В.А. Фираго, А.Ф. Шилов // Бюл.25.- 1991 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
Метки: дальности, скорости, способ, объекта, определения
Код ссылки
<a href="https://by.patents.su/5-13509-sposob-opredeleniya-dalnosti-do-obekta-i-ego-skorosti.html" rel="bookmark" title="База патентов Беларуси">Способ определения дальности до объекта и его скорости</a>
Способ определения дальности до объекта и его скорости
Номер патента: 11960
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01S 17/00, G01C 3/08, G01P 3/36...
Метки: определения, способ, объекта, скорости, дальности
Текст:
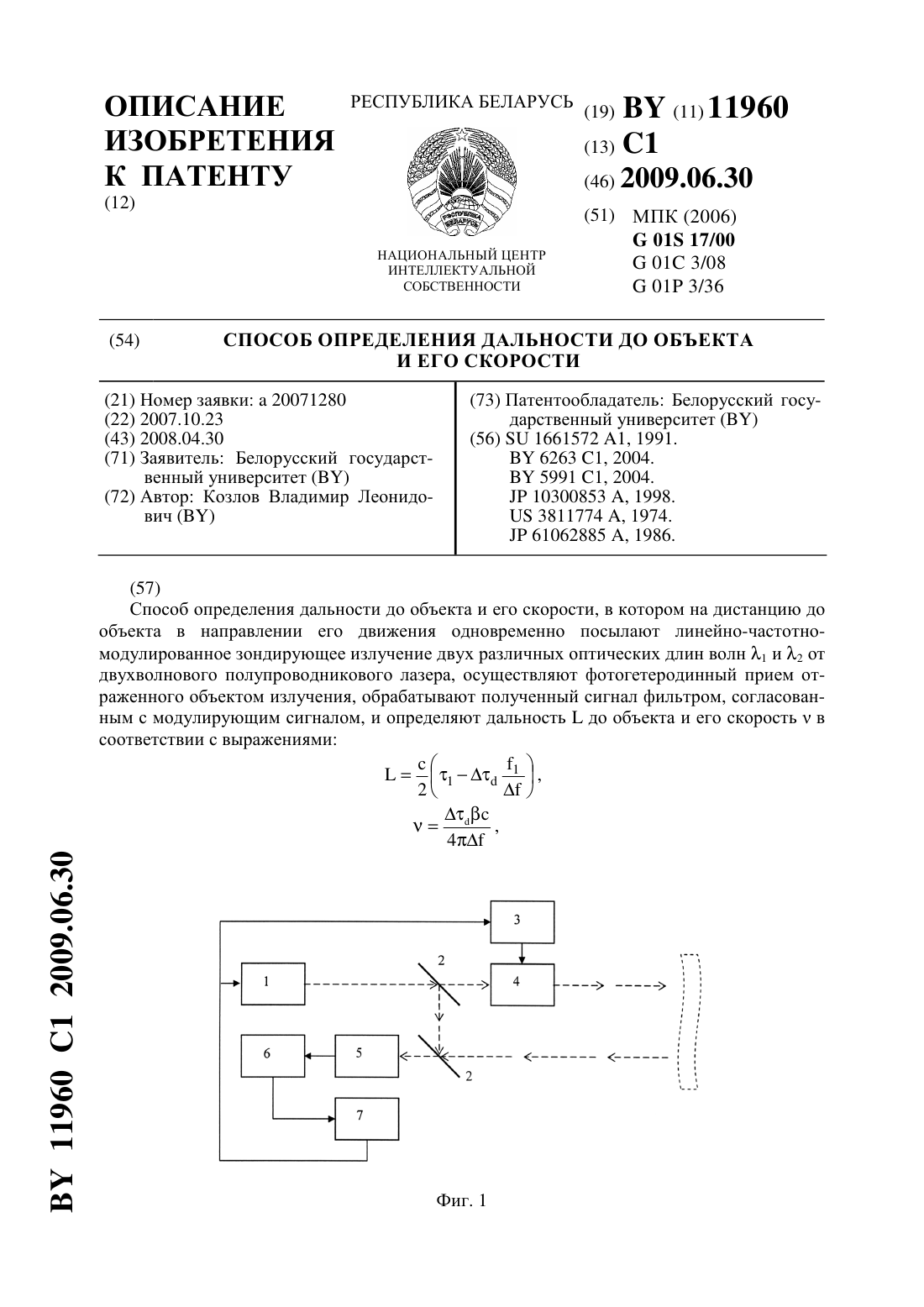
...Для обеспечения возможности одновременного определения за один зондирующий импульс дальности и скорости объекта в качестве источника зондирующего излучения предлагается использовать двухволновой инжекционный полупроводниковый лазер 2,обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных диодов 3 достигает значений 20-100 нм....
Способ измерения дальности до объекта
Номер патента: 12740
Опубликовано: 30.12.2009
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: объекта, способ, дальности, измерения
Текст:
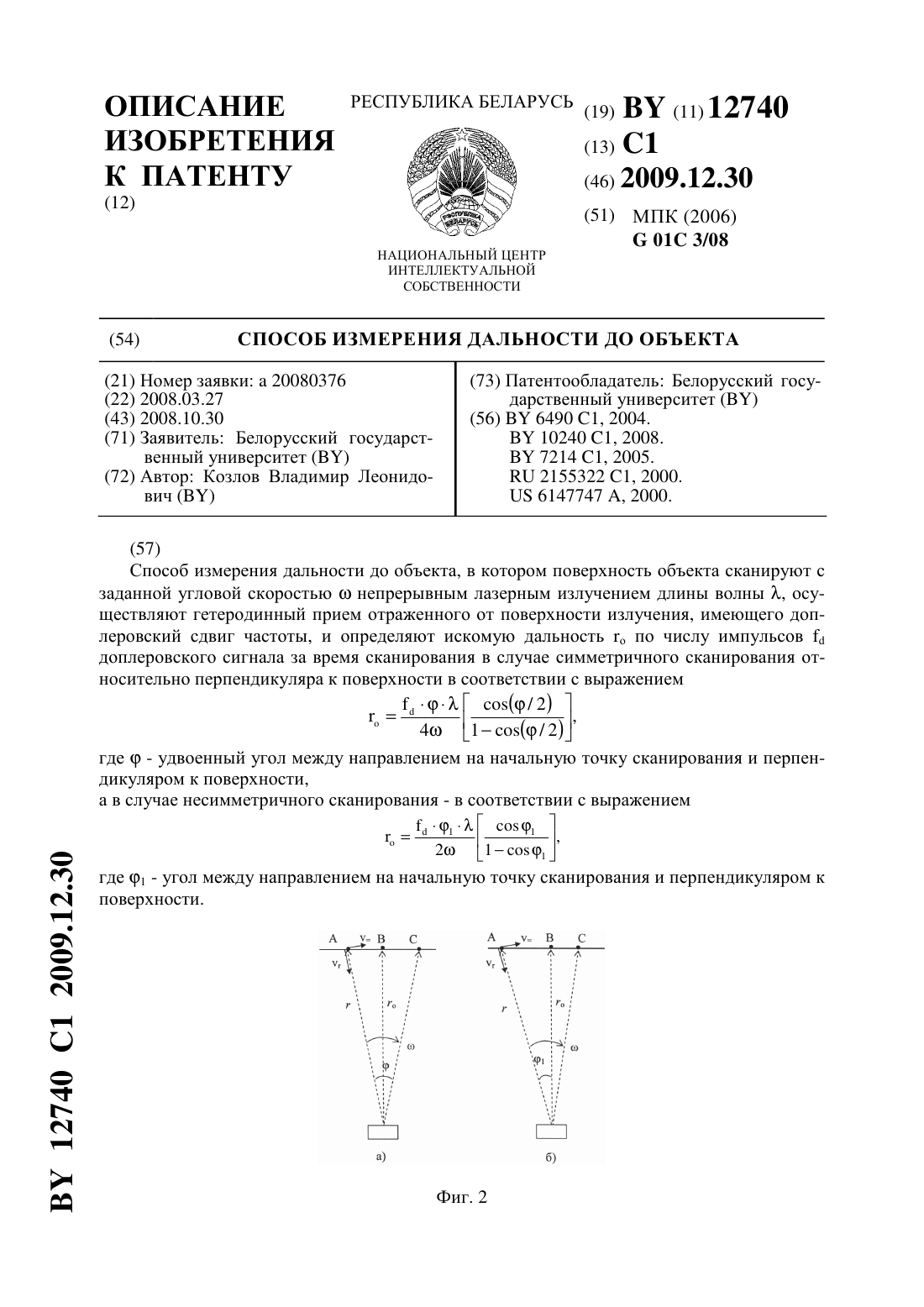
...на доплеровскую частоту , мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования,- расстояние до точки падения лазерного луча,- угловая скорость сканирования, с - скорость света,- длина волны зондирующего излучения, /2 - угол между лазерным лучом и перпендикуляром к поверхности (фиг. 2). Отраженное оптическое излучение, имеющее доплеровский сдвиг частоты, с помощью светоделителя 3...
Способ определения дальности до объекта
Номер патента: 13549
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: дальности, объекта, способ, определения
Текст:
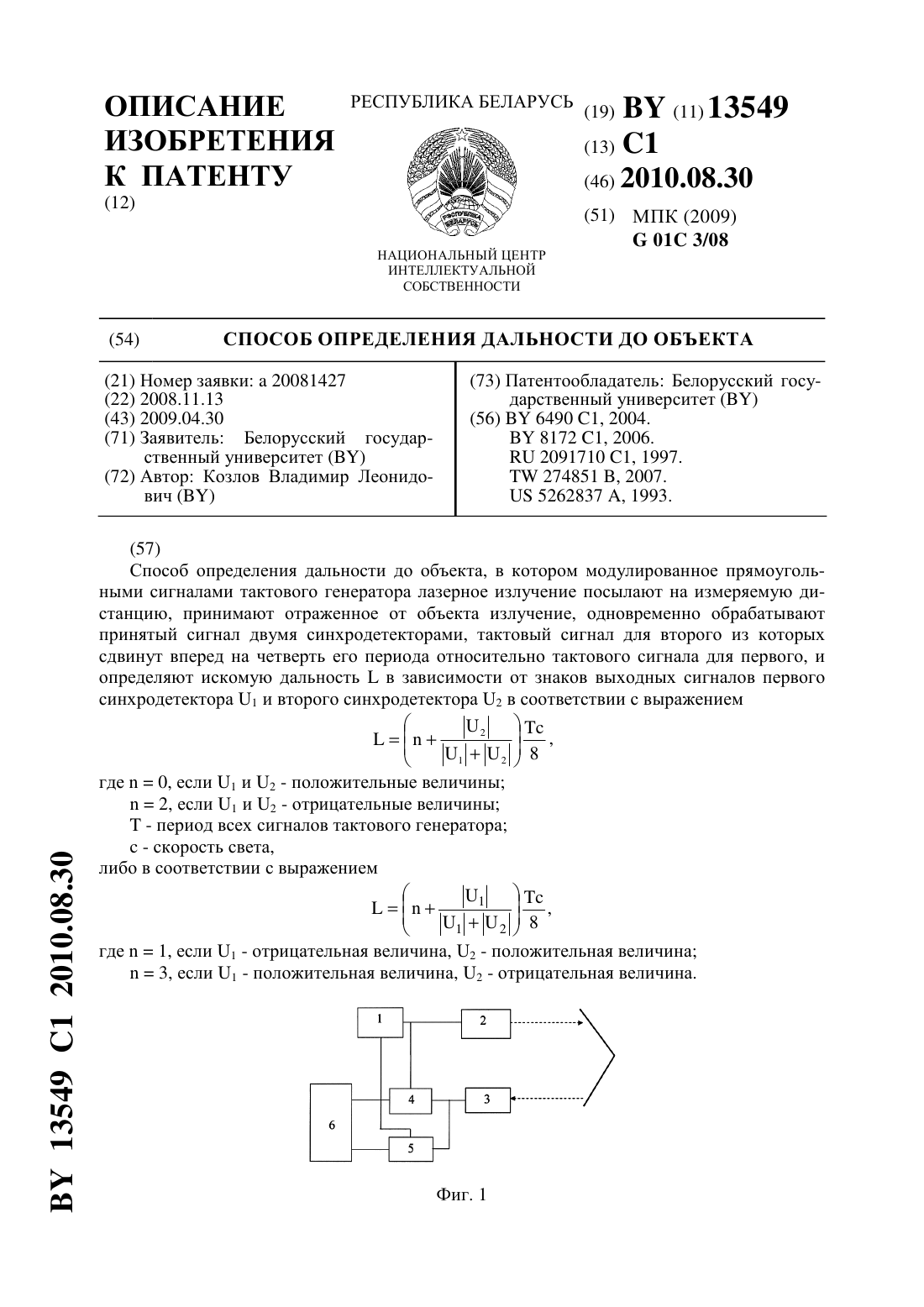
...а на фиг. 2 - графические материалы, поясняющие его работу. Для реализации заявляемого способа используются тактовый генератор 1, лазер 2, фотоприемник 3, первый синхродетектор 4, второй синхродетектор 5, вычислительный блок 6. Принцип измерения основан на фазовом способе измерения дальности, в котором фаза оптического сигнала, прошедшего измеряемое расстояние, сравнивается с фазой сигнала тактового генератора. При этом полагается, что...
Способ измерения дальности до объекта посредством двухволнового лазера
Номер патента: 11972
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: двухволнового, дальности, посредством, измерения, объекта, способ, лазера
Текст:
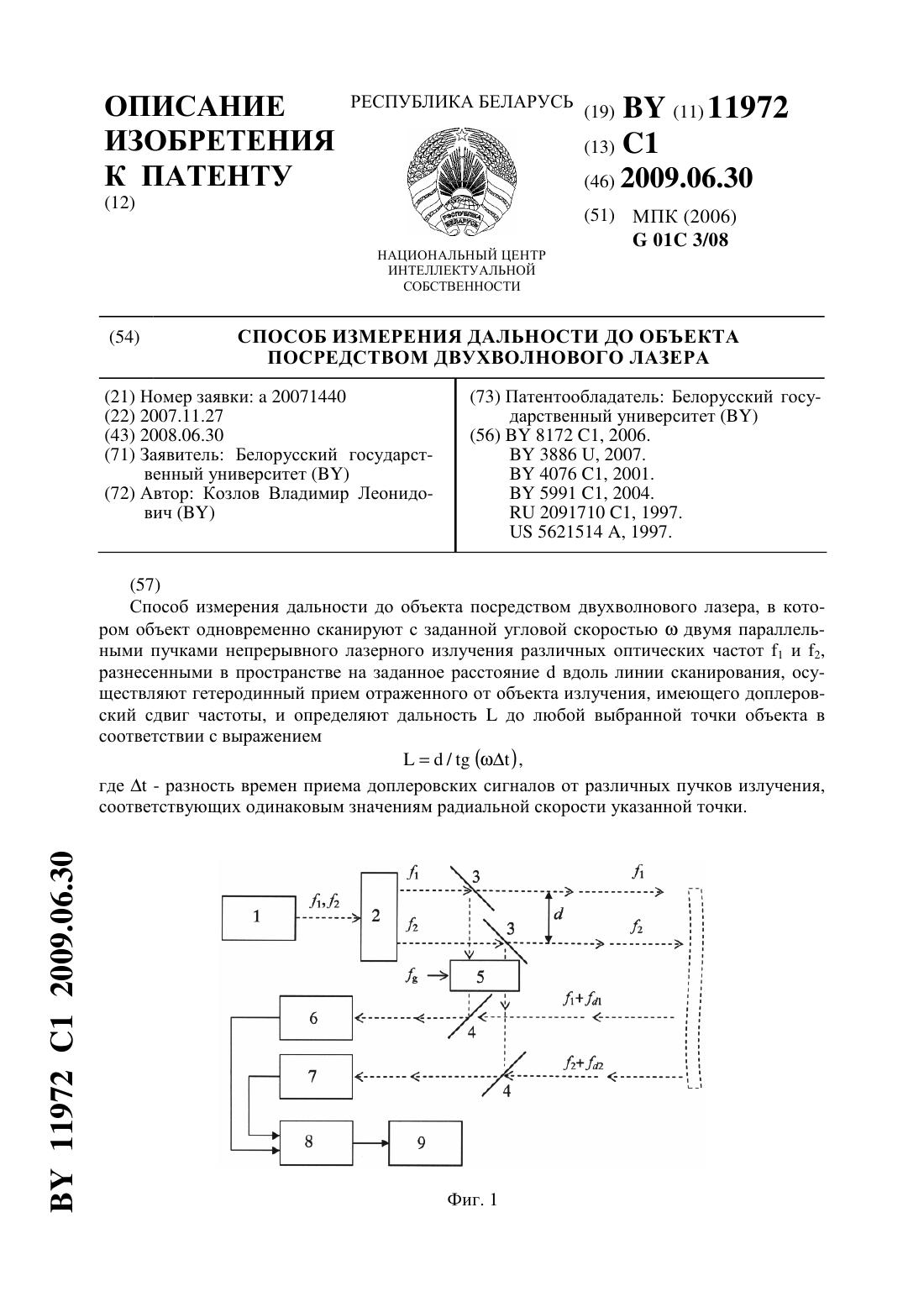
...излучение на частоте 1, в другом - на частоте 2. Светоделители 3 выделяют часть зондирующего излучения для формирования гетеродинного оптического сигнала на частотах 1 и 2, которые после прохождения блока частотного сдвига 5 (построенного, например, с использованием акустооптического модулятора) сдвигаются по частоте на . Таким образом, на дистанцию посылают два параллельных зондирующих луча на частотах 1 и 2, сдвинутых в пространстве...
Способ определения дальности объекта и устройство для его осуществления
Номер патента: 4739
Опубликовано: 30.12.2002
Автор: Коростик Константин Николаевич
МПК: G01S 17/10, G01C 3/08
Метки: объекта, определения, устройство, осуществления, способ, дальности
Текст:
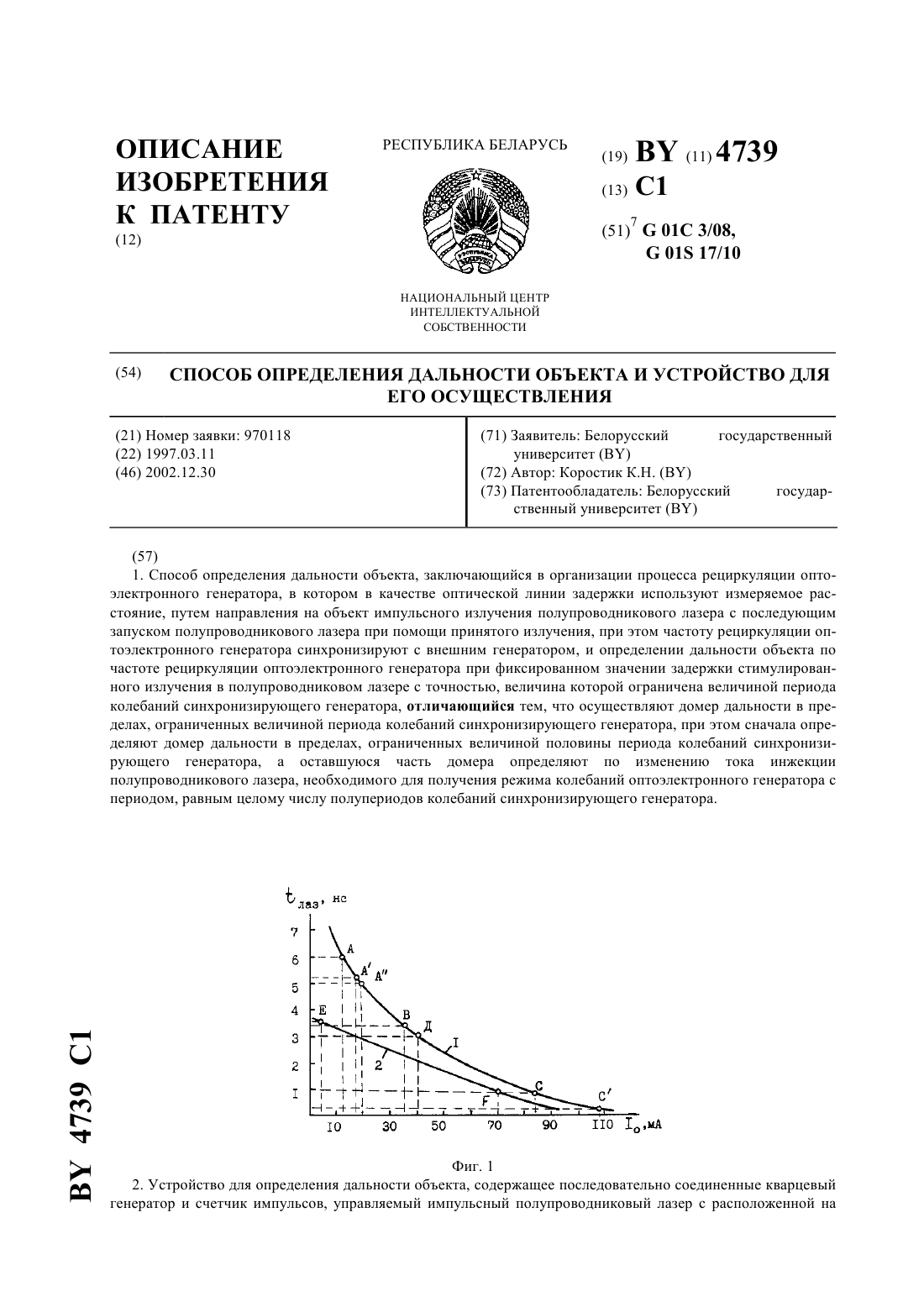
...Ткг), согласно кривой 1, для реализации заявляемого способа потребуется изменение тока постоянного смещения лазера 025 мА (см. точки А и В). При этом превышениетока накачки лазера над пороговым значением изменяется от(1,1 ст) /ст 1,2 лишь до(1,1 ст) /ст 1,4. В спосоп п п п бе-прототипе 072 мА (см. точки А и С), а значениев точке С достигает значения 1,9. При этом следует иметь в виду, что в начальной точке А 1,2 выбрано значительно ниже...
Предыдущий патент: Износостойкий чугун
Следующий патент: Состав для получения жидкого концентрированного кобальтового удобрения для некорневой подкормки зернобобовых культур
Случайный патент: Способ оценки состояния поверхности конструктивного элемента