Способ измерения дальности до объекта
Текст
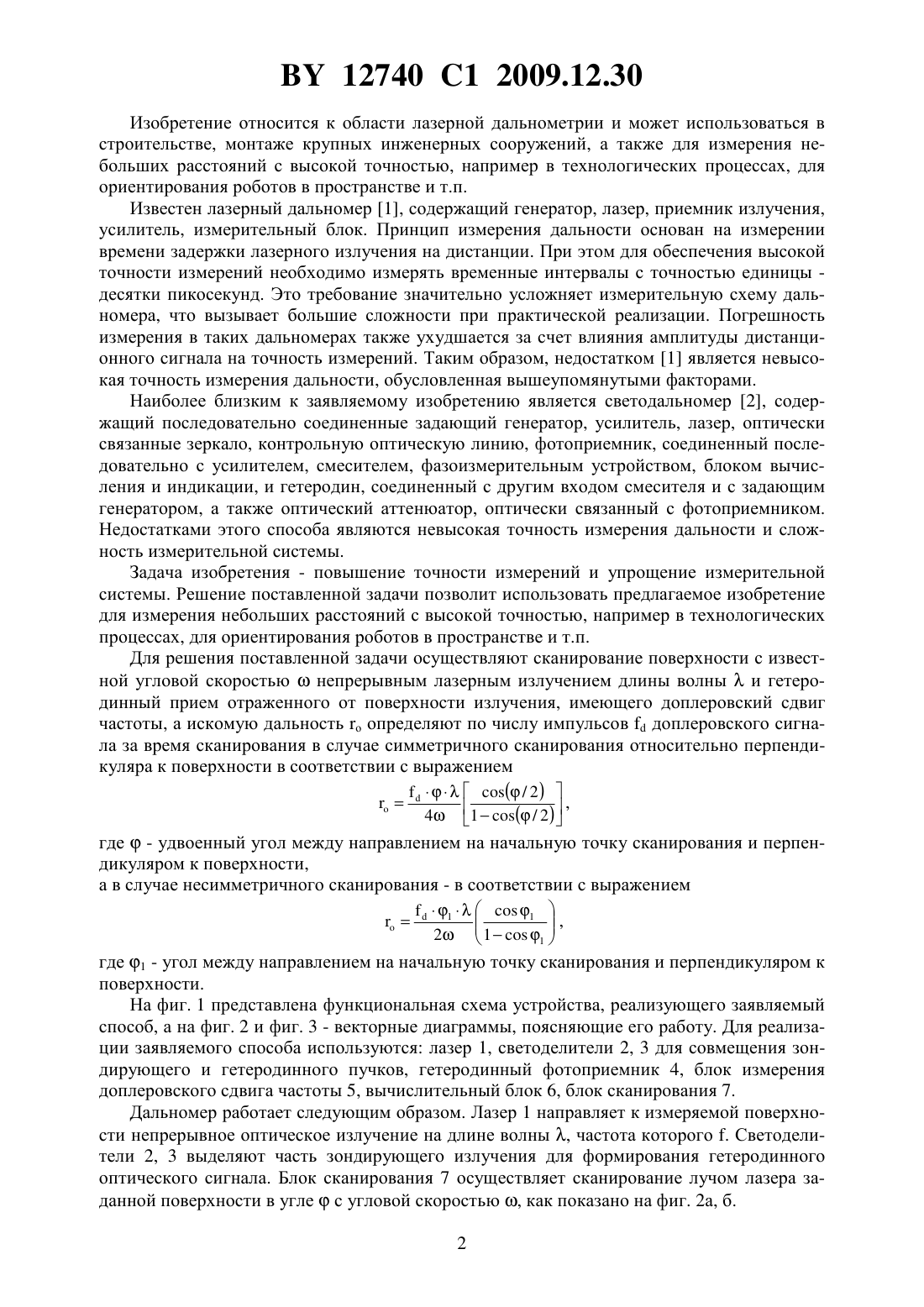
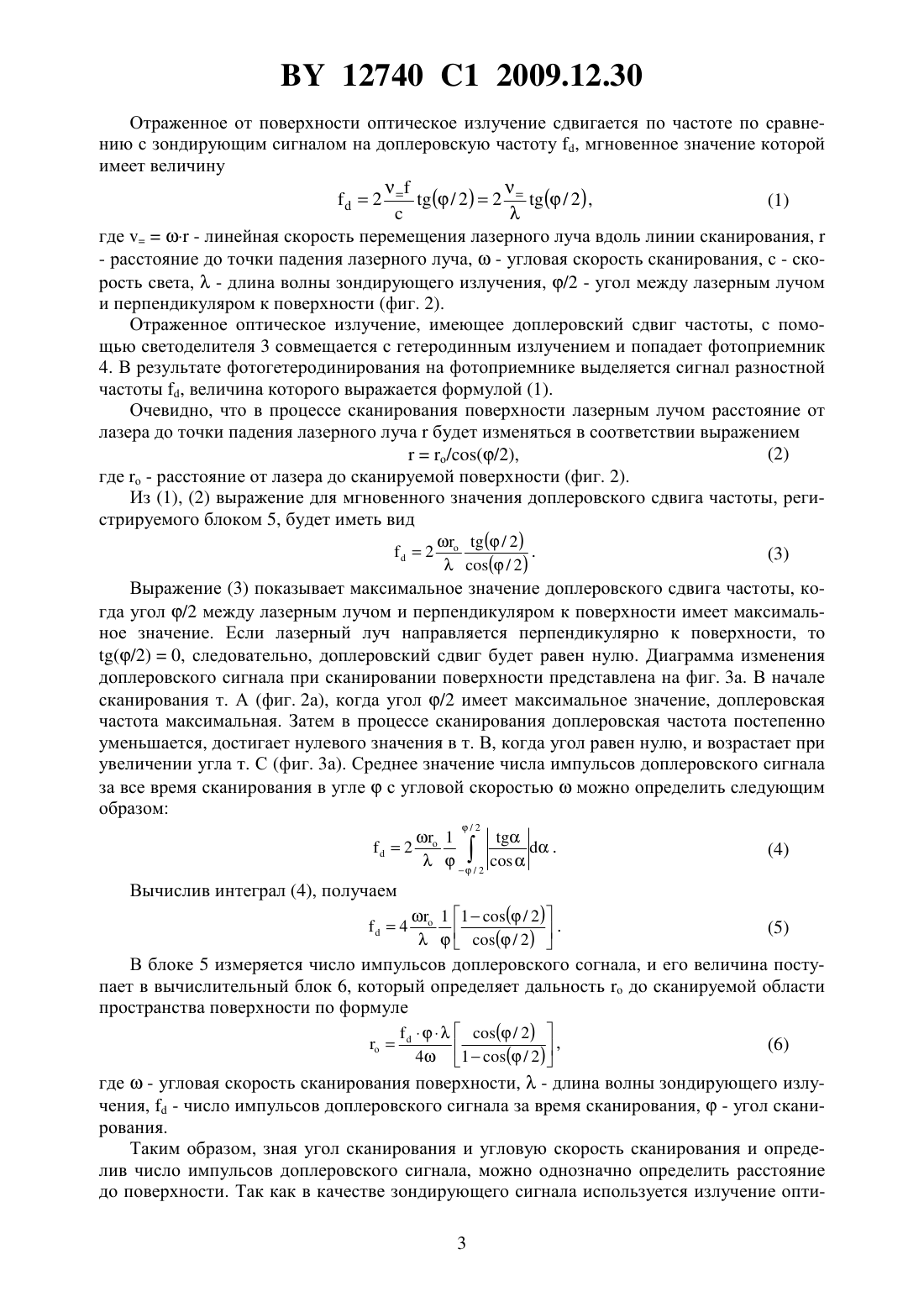
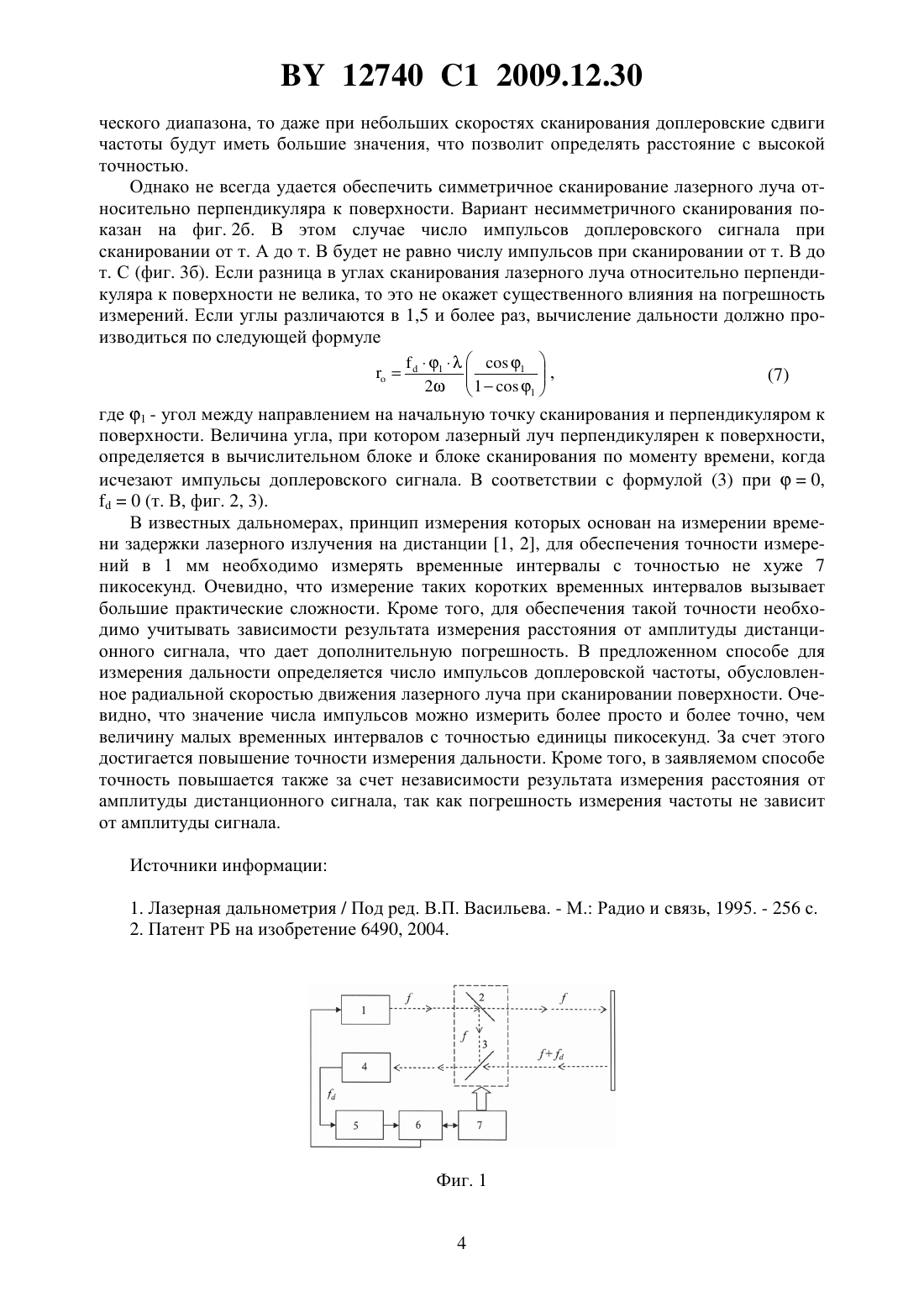
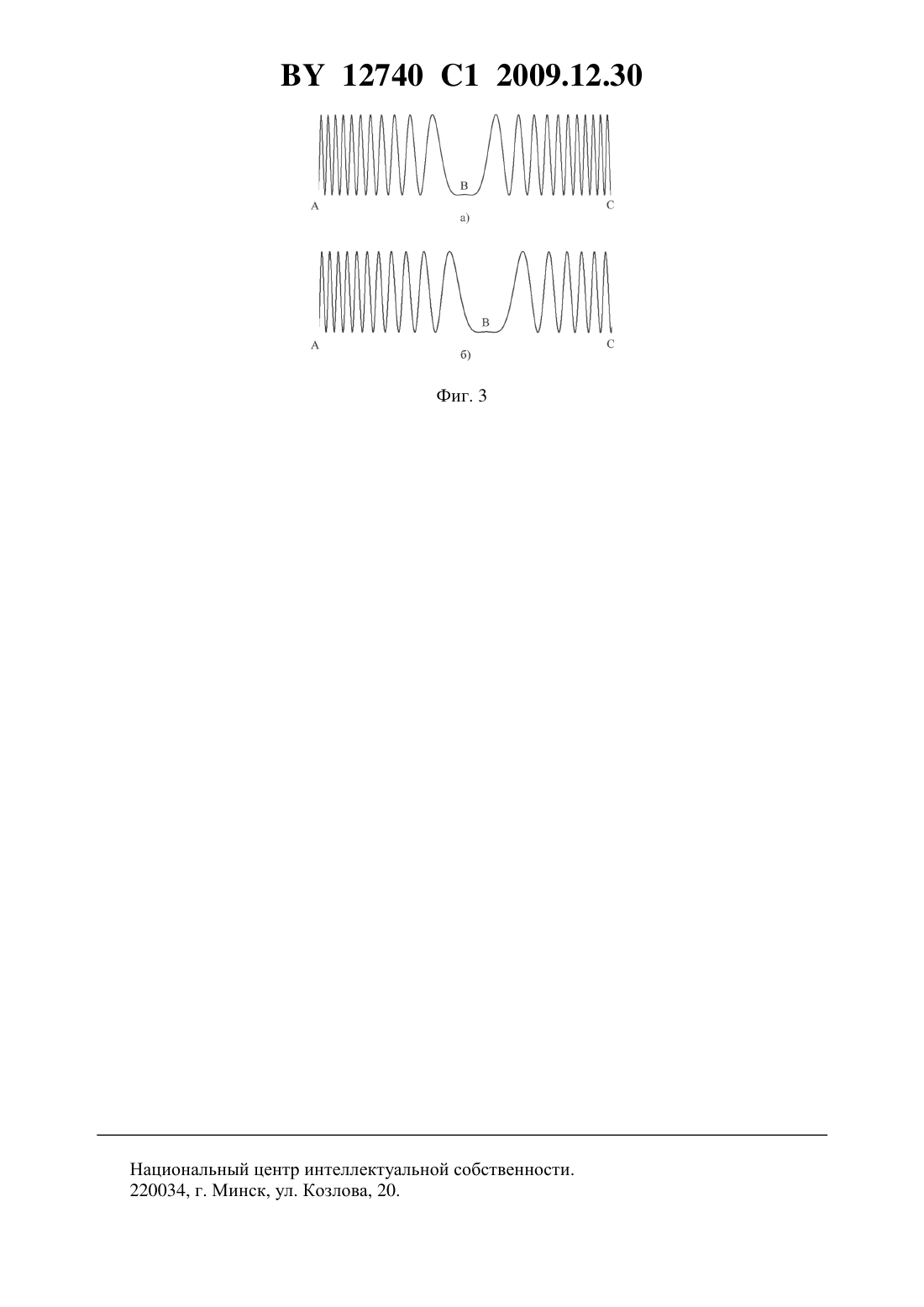
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ измерения дальности до объекта, в котором поверхность объекта сканируют с заданной угловой скоростьюнепрерывным лазерным излучением длины волны , осуществляют гетеродинный прием отраженного от поверхности излучения, имеющего доплеровский сдвиг частоты, и определяют искомую дальность о по числу импульсовдоплеровского сигнала за время сканирования в случае симметричного сканирования относительно перпендикуляра к поверхности в соответствии с выражением( / 2) где- удвоенный угол между направлением на начальную точку сканирования и перпендикуляром к поверхности,а в случае несимметричного сканирования - в соответствии с выражением где 1 - угол между направлением на начальную точку сканирования и перпендикуляром к поверхности. 12740 1 2009.12.30 Изобретение относится к области лазерной дальнометрии и может использоваться в строительстве, монтаже крупных инженерных сооружений, а также для измерения небольших расстояний с высокой точностью, например в технологических процессах, для ориентирования роботов в пространстве и т.п. Известен лазерный дальномер 1, содержащий генератор, лазер, приемник излучения,усилитель, измерительный блок. Принцип измерения дальности основан на измерении времени задержки лазерного излучения на дистанции. При этом для обеспечения высокой точности измерений необходимо измерять временные интервалы с точностью единицы десятки пикосекунд. Это требование значительно усложняет измерительную схему дальномера, что вызывает большие сложности при практической реализации. Погрешность измерения в таких дальномерах также ухудшается за счет влияния амплитуды дистанционного сигнала на точность измерений. Таким образом, недостатком 1 является невысокая точность измерения дальности, обусловленная вышеупомянутыми факторами. Наиболее близким к заявляемому изобретению является светодальномер 2, содержащий последовательно соединенные задающий генератор, усилитель, лазер, оптически связанные зеркало, контрольную оптическую линию, фотоприемник, соединенный последовательно с усилителем, смесителем, фазоизмерительным устройством, блоком вычисления и индикации, и гетеродин, соединенный с другим входом смесителя и с задающим генератором, а также оптический аттенюатор, оптически связанный с фотоприемником. Недостатками этого способа являются невысокая точность измерения дальности и сложность измерительной системы. Задача изобретения - повышение точности измерений и упрощение измерительной системы. Решение поставленной задачи позволит использовать предлагаемое изобретение для измерения небольших расстояний с высокой точностью, например в технологических процессах, для ориентирования роботов в пространстве и т.п. Для решения поставленной задачи осуществляют сканирование поверхности с известной угловой скоростьюнепрерывным лазерным излучением длины волныи гетеродинный прием отраженного от поверхности излучения, имеющего доплеровский сдвиг частоты, а искомую дальность о определяют по числу импульсовдоплеровского сигнала за время сканирования в случае симметричного сканирования относительно перпендикуляра к поверхности в соответствии с выражением где- удвоенный угол между направлением на начальную точку сканирования и перпендикуляром к поверхности,а в случае несимметричного сканирования - в соответствии с выражением где 1 - угол между направлением на начальную точку сканирования и перпендикуляром к поверхности. На фиг. 1 представлена функциональная схема устройства, реализующего заявляемый способ, а на фиг. 2 и фиг. 3 - векторные диаграммы, поясняющие его работу. Для реализации заявляемого способа используются лазер 1, светоделители 2, 3 для совмещения зондирующего и гетеродинного пучков, гетеродинный фотоприемник 4, блок измерения доплеровского сдвига частоты 5, вычислительный блок 6, блок сканирования 7. Дальномер работает следующим образом. Лазер 1 направляет к измеряемой поверхности непрерывное оптическое излучение на длине волны , частота которого . Светоделители 2, 3 выделяют часть зондирующего излучения для формирования гетеродинного оптического сигнала. Блок сканирования 7 осуществляет сканирование лучом лазера заданной поверхности в углес угловой скоростью , как показано на фиг. 2 а, б. 2 12740 1 2009.12.30 Отраженное от поверхности оптическое излучение сдвигается по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования,- расстояние до точки падения лазерного луча,- угловая скорость сканирования, с - скорость света,- длина волны зондирующего излучения, /2 - угол между лазерным лучом и перпендикуляром к поверхности (фиг. 2). Отраженное оптическое излучение, имеющее доплеровский сдвиг частоты, с помощью светоделителя 3 совмещается с гетеродинным излучением и попадает фотоприемник 4. В результате фотогетеродинирования на фотоприемнике выделяется сигнал разностной частоты , величина которого выражается формулой (1). Очевидно, что в процессе сканирования поверхности лазерным лучом расстояние от лазера до точки падения лазерного лучабудет изменяться в соответствии выражением(2)о/(/2),где о - расстояние от лазера до сканируемой поверхности (фиг. 2). Из (1), (2) выражение для мгновенного значения доплеровского сдвига частоты, регистрируемого блоком 5, будет иметь вид 2 Выражение (3) показывает максимальное значение доплеровского сдвига частоты, когда угол /2 между лазерным лучом и перпендикуляром к поверхности имеет максимальное значение. Если лазерный луч направляется перпендикулярно к поверхности, то(/2)0, следовательно, доплеровский сдвиг будет равен нулю. Диаграмма изменения доплеровского сигнала при сканировании поверхности представлена на фиг. 3 а. В начале сканирования т. А (фиг. 2 а), когда угол /2 имеет максимальное значение, доплеровская частота максимальная. Затем в процессе сканирования доплеровская частота постепенно уменьшается, достигает нулевого значения в т. В, когда угол равен нулю, и возрастает при увеличении угла т. С (фиг. 3 а). Среднее значение числа импульсов доплеровского сигнала за все время сканирования в углес угловой скоростьюможно определить следующим образом В блоке 5 измеряется число импульсов доплеровского согнала, и его величина поступает в вычислительный блок 6, который определяет дальность о до сканируемой области пространства поверхности по формуле о где- угловая скорость сканирования поверхности,- длина волны зондирующего излучения,- число импульсов доплеровского сигнала за время сканирования,- угол сканирования. Таким образом, зная угол сканирования и угловую скорость сканирования и определив число импульсов доплеровского сигнала, можно однозначно определить расстояние до поверхности. Так как в качестве зондирующего сигнала используется излучение опти 3 12740 1 2009.12.30 ческого диапазона, то даже при небольших скоростях сканирования доплеровские сдвиги частоты будут иметь большие значения, что позволит определять расстояние с высокой точностью. Однако не всегда удается обеспечить симметричное сканирование лазерного луча относительно перпендикуляра к поверхности. Вариант несимметричного сканирования показан на фиг. 2 б. В этом случае число импульсов доплеровского сигнала при сканировании от т. А до т. В будет не равно числу импульсов при сканировании от т. В до т. С (фиг. 3 б). Если разница в углах сканирования лазерного луча относительно перпендикуляра к поверхности не велика, то это не окажет существенного влияния на погрешность измерений. Если углы различаются в 1,5 и более раз, вычисление дальности должно производиться по следующей формуле где 1 - угол между направлением на начальную точку сканирования и перпендикуляром к поверхности. Величина угла, при котором лазерный луч перпендикулярен к поверхности,определяется в вычислительном блоке и блоке сканирования по моменту времени, когда исчезают импульсы доплеровского сигнала. В соответствии с формулой (3) при 0,0 (т. В, фиг. 2, 3). В известных дальномерах, принцип измерения которых основан на измерении времени задержки лазерного излучения на дистанции 1, 2, для обеспечения точности измерений в 1 мм необходимо измерять временные интервалы с точностью не хуже 7 пикосекунд. Очевидно, что измерение таких коротких временных интервалов вызывает большие практические сложности. Кроме того, для обеспечения такой точности необходимо учитывать зависимости результата измерения расстояния от амплитуды дистанционного сигнала, что дает дополнительную погрешность. В предложенном способе для измерения дальности определяется число импульсов доплеровской частоты, обусловленное радиальной скоростью движения лазерного луча при сканировании поверхности. Очевидно, что значение числа импульсов можно измерить более просто и более точно, чем величину малых временных интервалов с точностью единицы пикосекунд. За счет этого достигается повышение точности измерения дальности. Кроме того, в заявляемом способе точность повышается также за счет независимости результата измерения расстояния от амплитуды дистанционного сигнала, так как погрешность измерения частоты не зависит от амплитуды сигнала. Источники информации 1. Лазерная дальнометрия / Под ред. В.П. Васильева. - М. Радио и связь, 1995. - 256 с. 2. Патент РБ на изобретение 6490, 2004. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G01C 3/08
Метки: объекта, способ, дальности, измерения
Код ссылки
<a href="https://by.patents.su/5-12740-sposob-izmereniya-dalnosti-do-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ измерения дальности до объекта</a>
Способ измерения дальности до объекта посредством двухволнового лазера
Номер патента: 11972
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: дальности, двухволнового, посредством, измерения, лазера, способ, объекта
Текст:
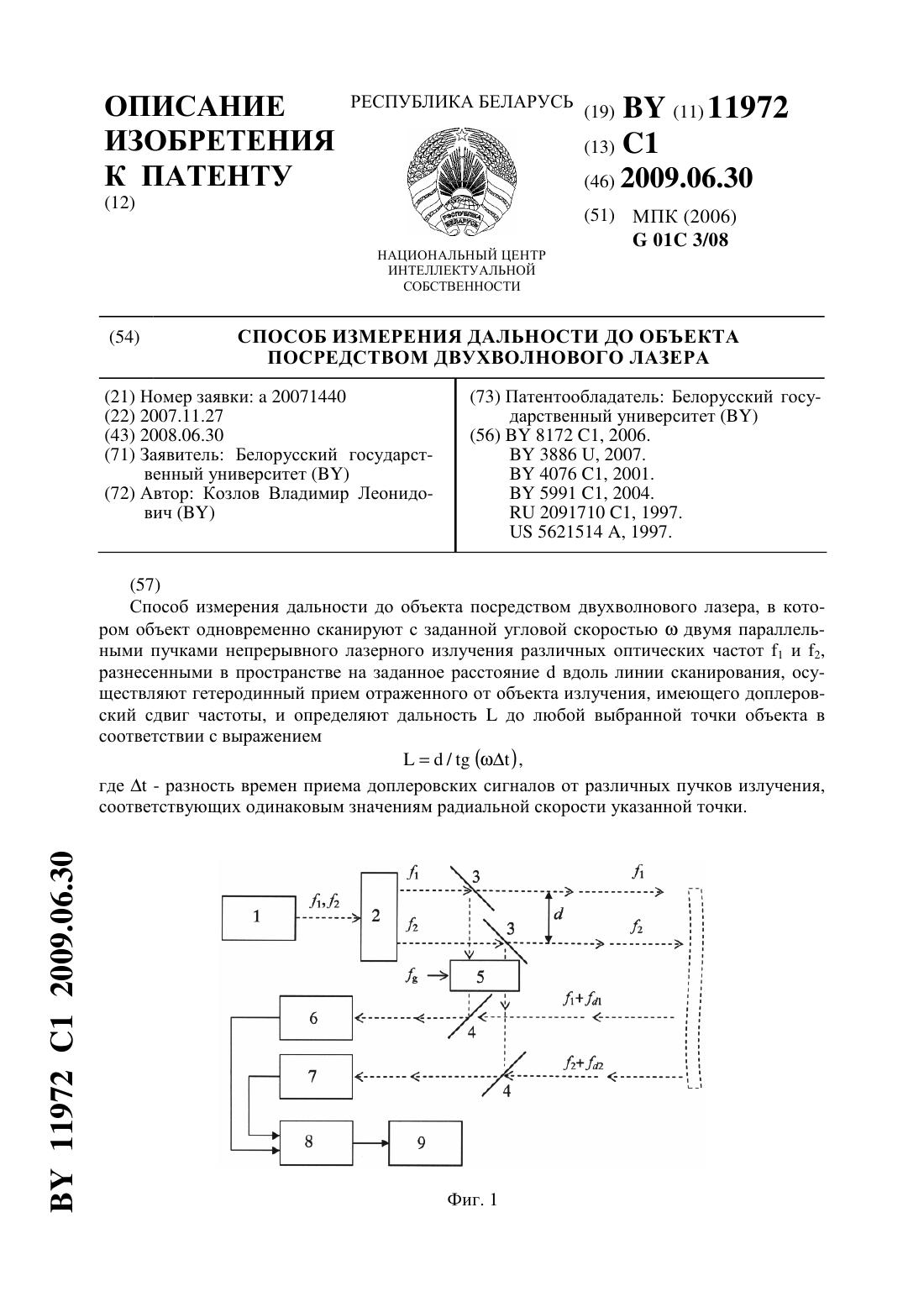
...излучение на частоте 1, в другом - на частоте 2. Светоделители 3 выделяют часть зондирующего излучения для формирования гетеродинного оптического сигнала на частотах 1 и 2, которые после прохождения блока частотного сдвига 5 (построенного, например, с использованием акустооптического модулятора) сдвигаются по частоте на . Таким образом, на дистанцию посылают два параллельных зондирующих луча на частотах 1 и 2, сдвинутых в пространстве...
Способ измерения дальности до объекта
Номер патента: 5991
Опубликовано: 30.03.2004
Авторы: Михайлов Анатолий Борисович, Савченко Владимир Дмитриевич
МПК: G01C 3/08
Метки: объекта, измерения, способ, дальности
Текст:
...электрических цепей и т.д. не представляется возможным. В результате постоянной подачи питающего напряжения на ФПУ снижается такой показатель надежности дальномерной системы, как наработка на отказ, поскольку этот параметр самого ФПУ может быть невысоким. Кроме того, при совместной работе множества дальномерных систем, например в боевой обстановке, происходит нежелательное влияние их друг на друга через постоянно запитанные ФПУ,...
Способ измерения дальности объекта (варианты)
Номер патента: 4677
Опубликовано: 30.09.2002
Авторы: Кугейко Михаил Михайлович, Коростик Константин Николаевич
МПК: G01S 17/10, G01C 3/08
Метки: объекта, варианты, измерения, способ, дальности
Текст:
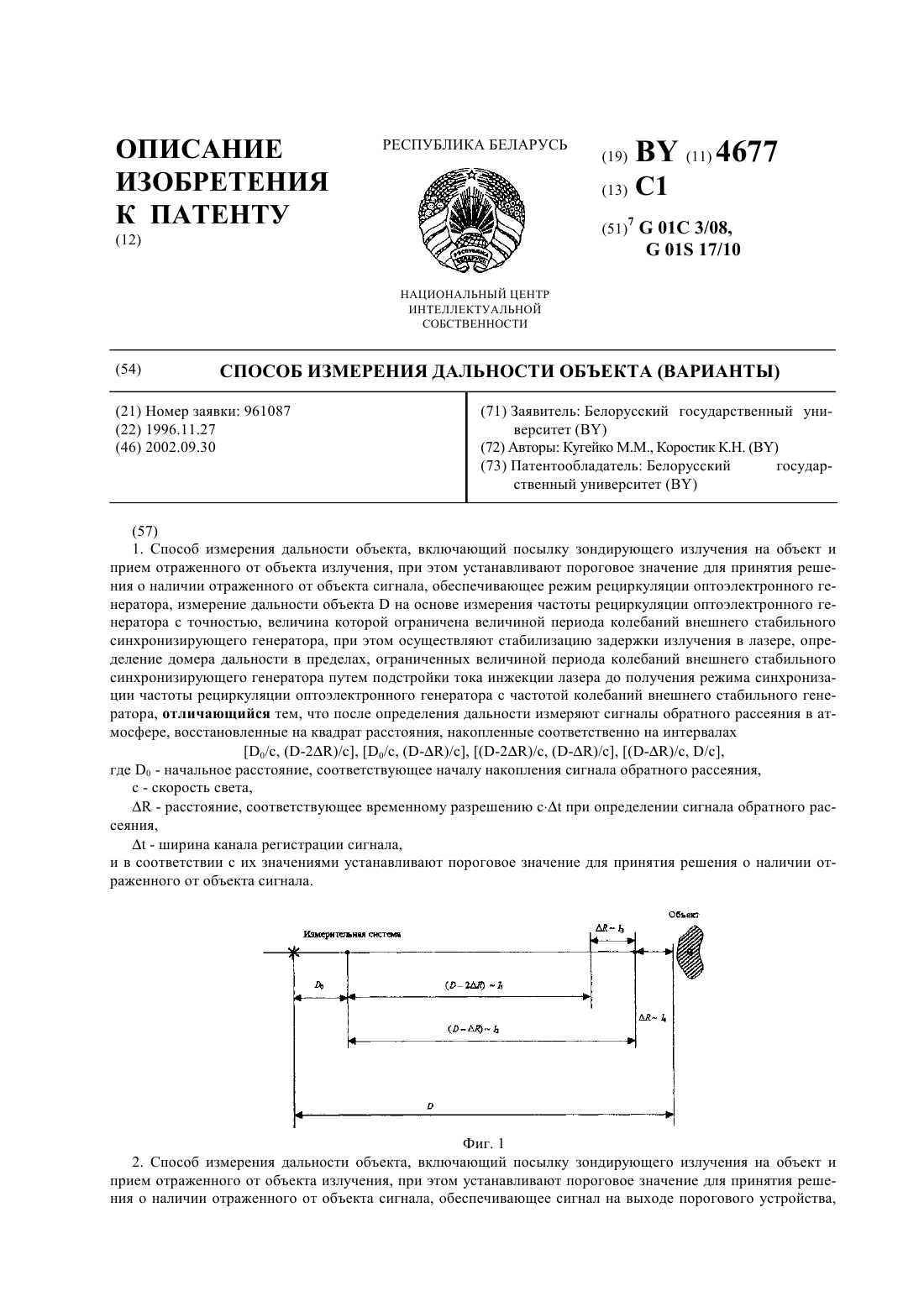
...скорректированный на ослабление в среде сигнал, не зависящий от состояния среды. Устанавливая порог принятия решения о наличии отраженного излучения в соответствии с (7), таким образом исключается временная неопределенность появления импульсного отклика на выходе фотоприемника,обусловленная ослаблением излучения в атмосфере. Другими словами, исключается влияние изменения состояния среды на определение дальности до объекта, тем самым...
Способ определения дальности до объекта и его скорости
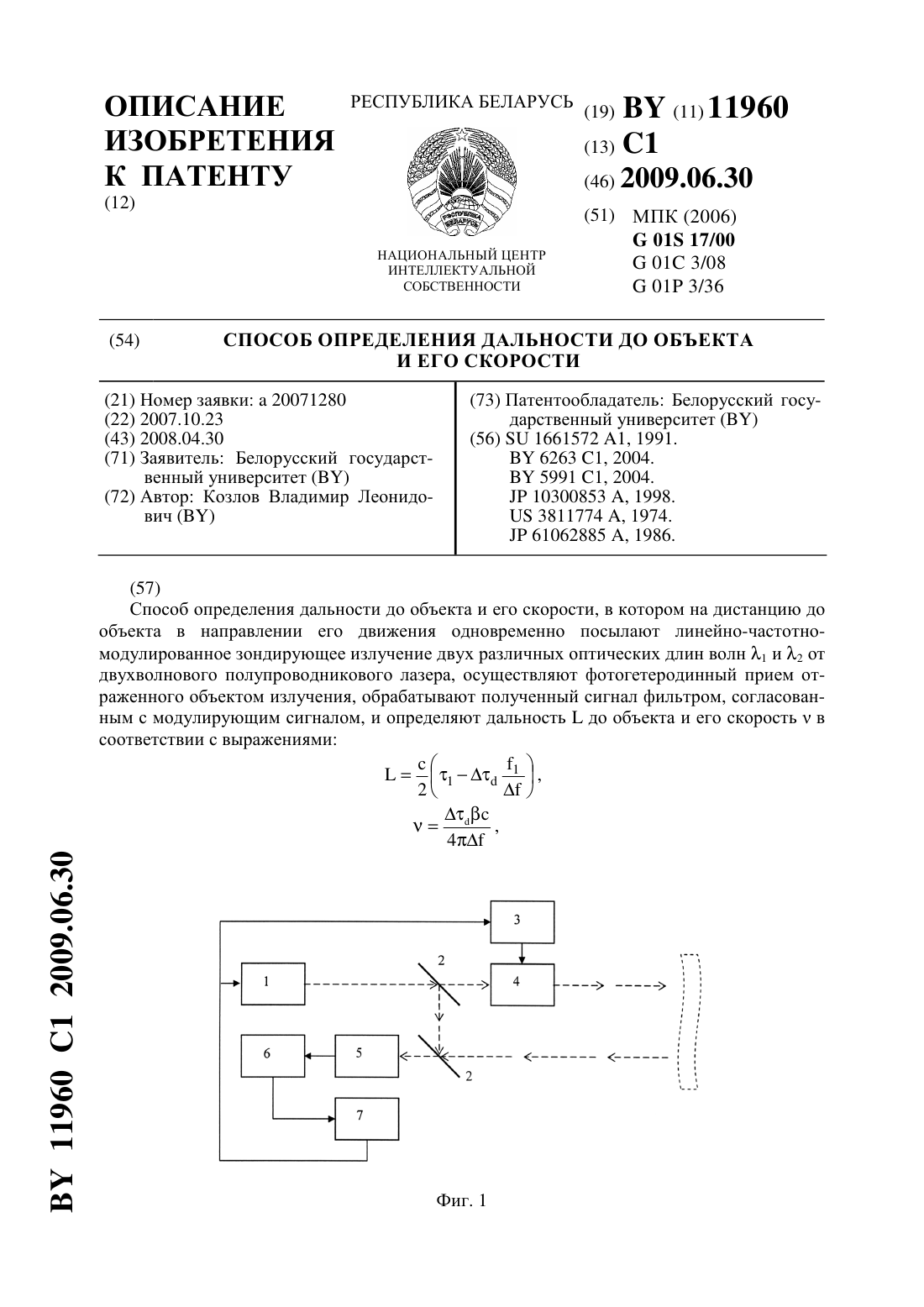
Номер патента: 11960
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01P 3/36, G01C 3/08, G01S 17/00...
Метки: скорости, определения, способ, дальности, объекта
Текст:
...Для обеспечения возможности одновременного определения за один зондирующий импульс дальности и скорости объекта в качестве источника зондирующего излучения предлагается использовать двухволновой инжекционный полупроводниковый лазер 2,обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных диодов 3 достигает значений 20-100 нм....
Способ определения дальности объекта и устройство для его осуществления
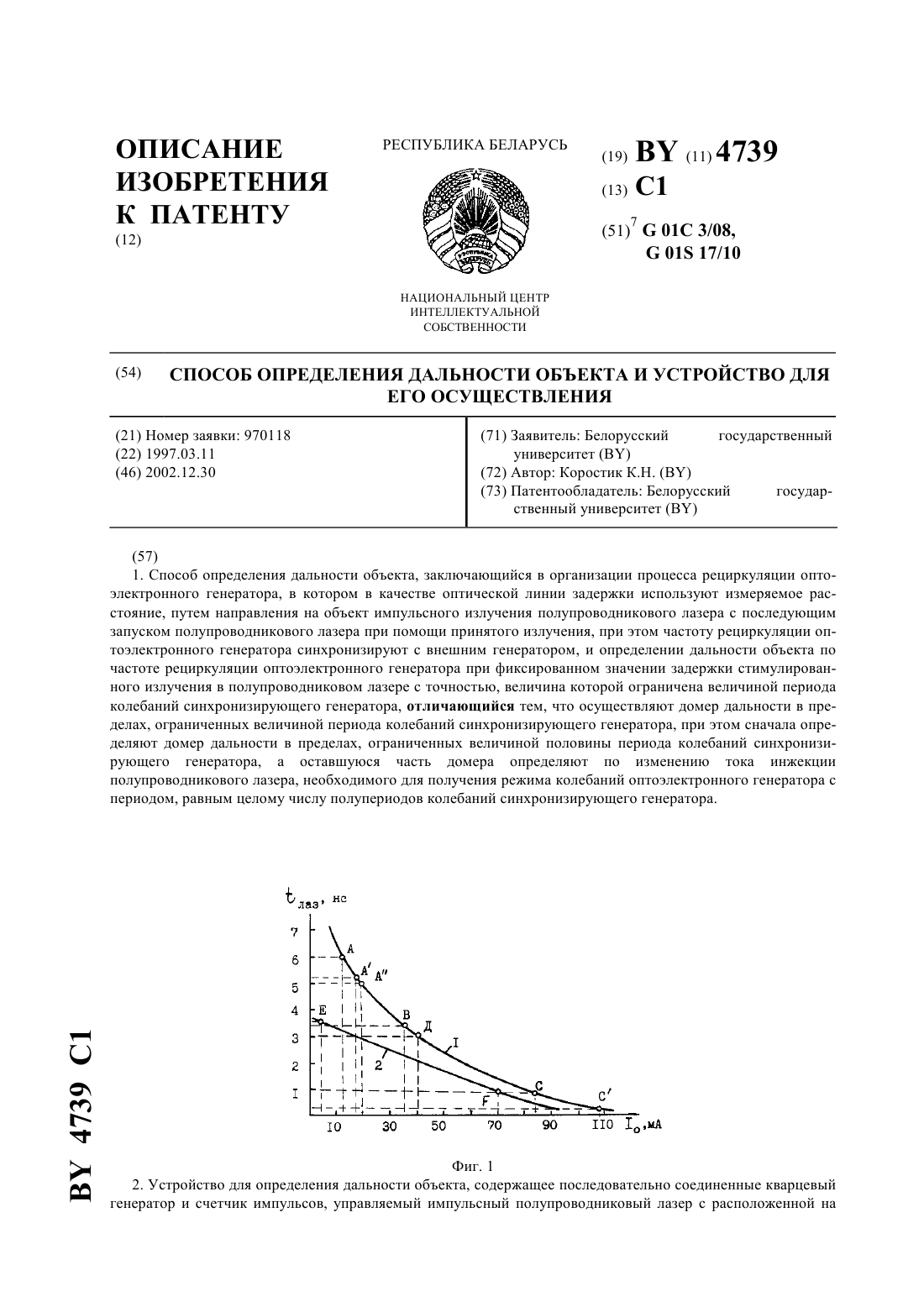
Номер патента: 4739
Опубликовано: 30.12.2002
Автор: Коростик Константин Николаевич
МПК: G01C 3/08, G01S 17/10
Метки: определения, осуществления, способ, объекта, устройство, дальности
Текст:
...Ткг), согласно кривой 1, для реализации заявляемого способа потребуется изменение тока постоянного смещения лазера 025 мА (см. точки А и В). При этом превышениетока накачки лазера над пороговым значением изменяется от(1,1 ст) /ст 1,2 лишь до(1,1 ст) /ст 1,4. В спосоп п п п бе-прототипе 072 мА (см. точки А и С), а значениев точке С достигает значения 1,9. При этом следует иметь в виду, что в начальной точке А 1,2 выбрано значительно ниже...
Предыдущий патент: Безалкогольный напиток
Следующий патент: Устройство регистрации одиночных фотонов на базе лавинного фотодиода
Случайный патент: Устройство для соединения кристаллизатора с литниковой системой