Способ измерения дальности до объекта посредством двухволнового лазера

Текст
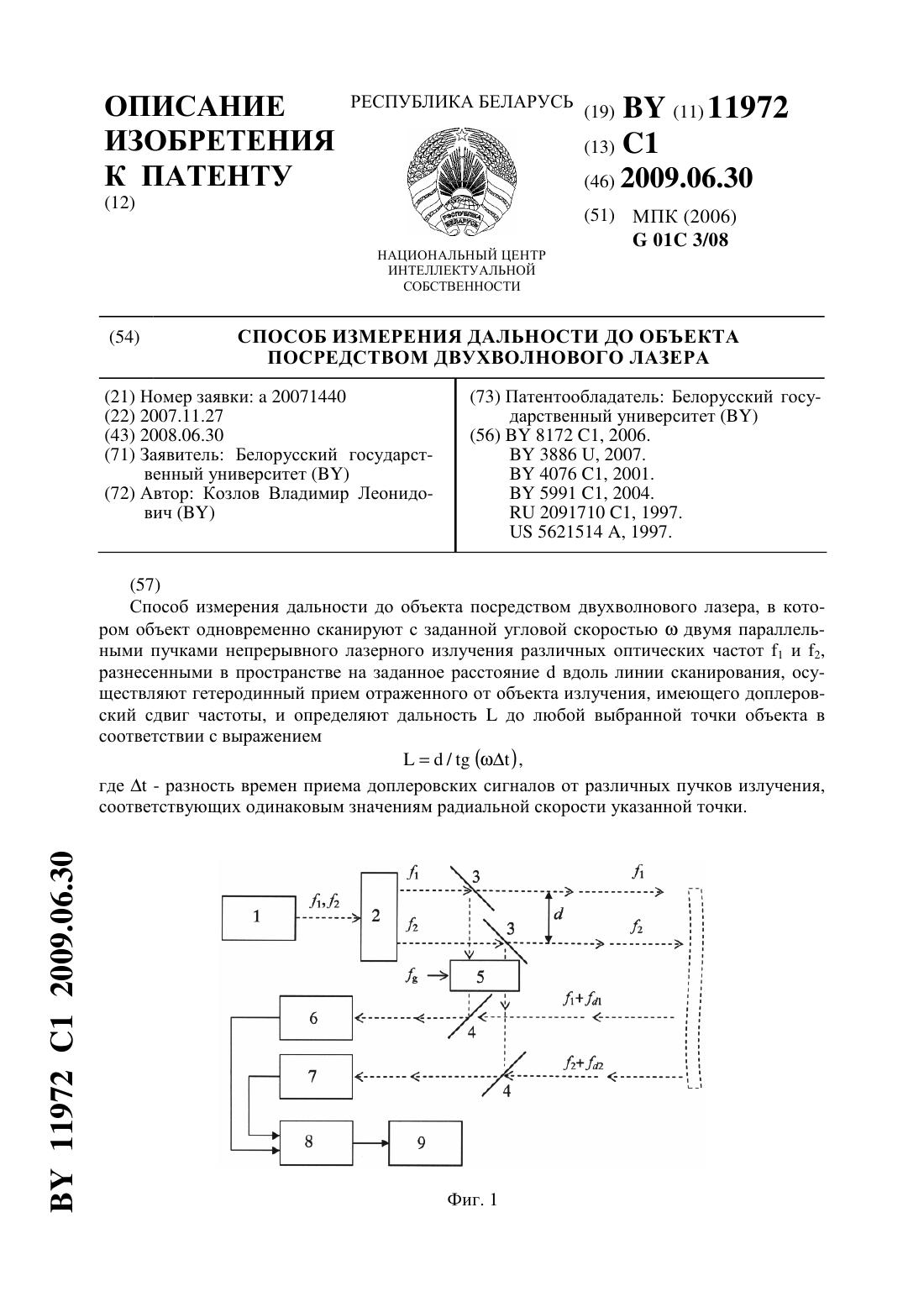
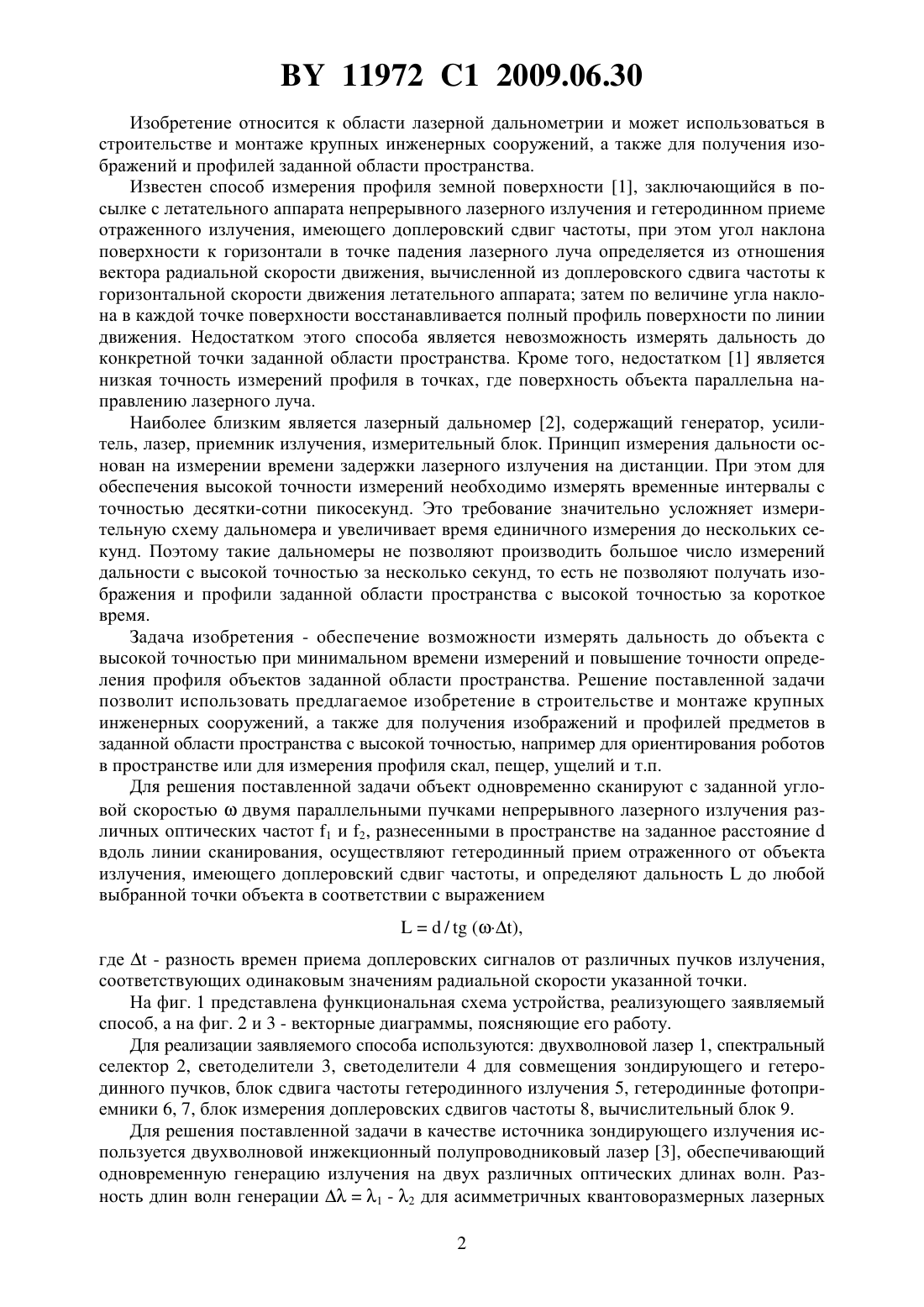
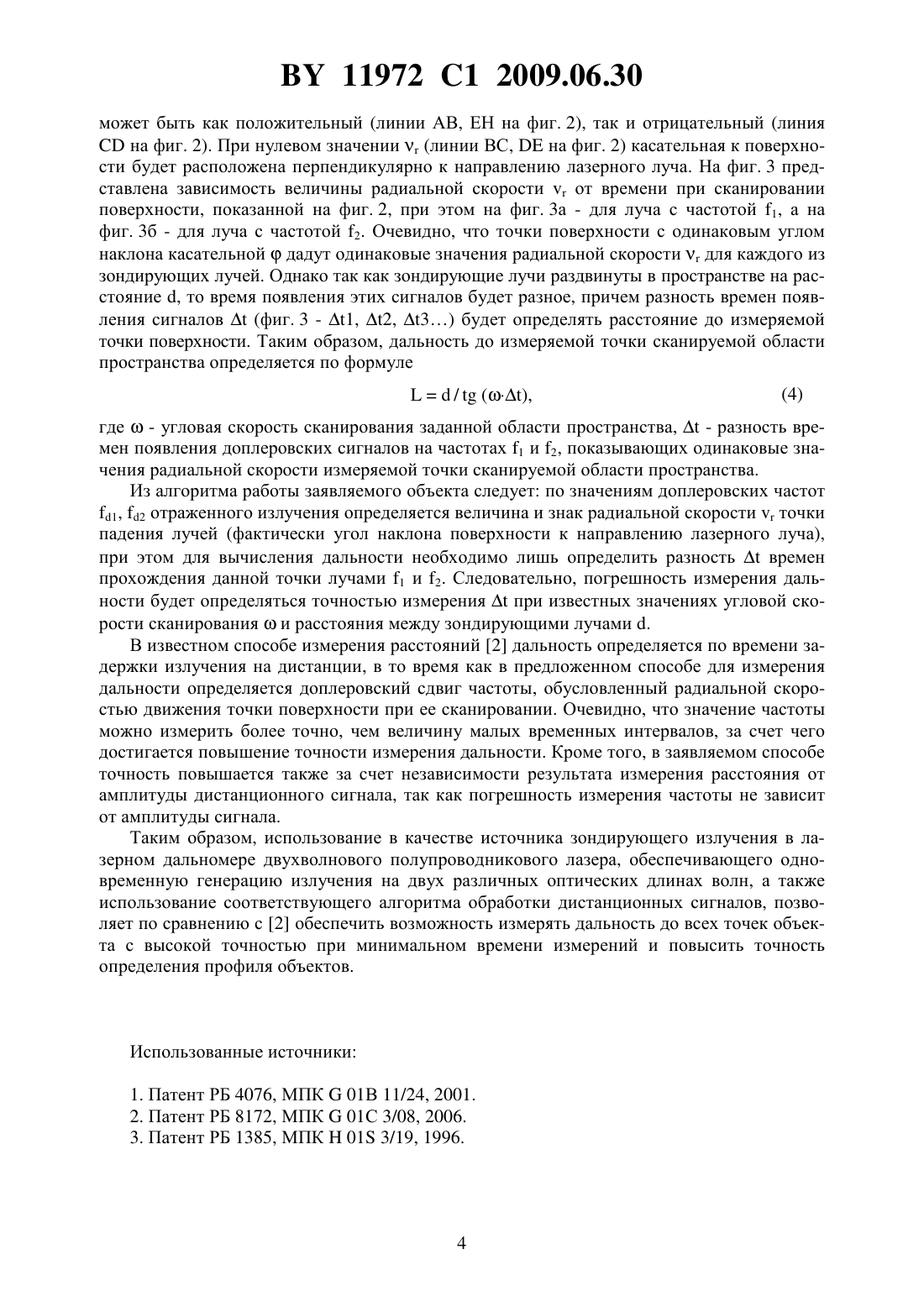
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА ПОСРЕДСТВОМ ДВУХВОЛНОВОГО ЛАЗЕРА(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ измерения дальности до объекта посредством двухволнового лазера, в котором объект одновременно сканируют с заданной угловой скоростьюдвумя параллельными пучками непрерывного лазерного излучения различных оптических частот 1 и 2,разнесенными в пространстве на заданное расстояниевдоль линии сканирования, осуществляют гетеродинный прием отраженного от объекта излучения, имеющего доплеровский сдвиг частоты, и определяют дальностьдо любой выбранной точки объекта в соответствии с выражением/( ) ,где- разность времен приема доплеровских сигналов от различных пучков излучения,соответствующих одинаковым значениям радиальной скорости указанной точки. 11972 1 2009.06.30 Изобретение относится к области лазерной дальнометрии и может использоваться в строительстве и монтаже крупных инженерных сооружений, а также для получения изображений и профилей заданной области пространства. Известен способ измерения профиля земной поверхности 1, заключающийся в посылке с летательного аппарата непрерывного лазерного излучения и гетеродинном приеме отраженного излучения, имеющего доплеровский сдвиг частоты, при этом угол наклона поверхности к горизонтали в точке падения лазерного луча определяется из отношения вектора радиальной скорости движения, вычисленной из доплеровского сдвига частоты к горизонтальной скорости движения летательного аппарата затем по величине угла наклона в каждой точке поверхности восстанавливается полный профиль поверхности по линии движения. Недостатком этого способа является невозможность измерять дальность до конкретной точки заданной области пространства. Кроме того, недостатком 1 является низкая точность измерений профиля в точках, где поверхность объекта параллельна направлению лазерного луча. Наиболее близким является лазерный дальномер 2, содержащий генератор, усилитель, лазер, приемник излучения, измерительный блок. Принцип измерения дальности основан на измерении времени задержки лазерного излучения на дистанции. При этом для обеспечения высокой точности измерений необходимо измерять временные интервалы с точностью десятки-сотни пикосекунд. Это требование значительно усложняет измерительную схему дальномера и увеличивает время единичного измерения до нескольких секунд. Поэтому такие дальномеры не позволяют производить большое число измерений дальности с высокой точностью за несколько секунд, то есть не позволяют получать изображения и профили заданной области пространства с высокой точностью за короткое время. Задача изобретения - обеспечение возможности измерять дальность до объекта с высокой точностью при минимальном времени измерений и повышение точности определения профиля объектов заданной области пространства. Решение поставленной задачи позволит использовать предлагаемое изобретение в строительстве и монтаже крупных инженерных сооружений, а также для получения изображений и профилей предметов в заданной области пространства с высокой точностью, например для ориентирования роботов в пространстве или для измерения профиля скал, пещер, ущелий и т.п. Для решения поставленной задачи объект одновременно сканируют с заданной угловой скоростьюдвумя параллельными пучками непрерывного лазерного излучения различных оптических частот 1 и 2, разнесенными в пространстве на заданное расстояниевдоль линии сканирования, осуществляют гетеродинный прием отраженного от объекта излучения, имеющего доплеровский сдвиг частоты, и определяют дальностьдо любой выбранной точки объекта в соответствии с выражением/,где- разность времен приема доплеровских сигналов от различных пучков излучения,соответствующих одинаковым значениям радиальной скорости указанной точки. На фиг. 1 представлена функциональная схема устройства, реализующего заявляемый способ, а на фиг. 2 и 3 - векторные диаграммы, поясняющие его работу. Для реализации заявляемого способа используются двухволновой лазер 1, спектральный селектор 2, светоделители 3, светоделители 4 для совмещения зондирующего и гетеродинного пучков, блок сдвига частоты гетеродинного излучения 5, гетеродинные фотоприемники 6, 7, блок измерения доплеровских сдвигов частоты 8, вычислительный блок 9. Для решения поставленной задачи в качестве источника зондирующего излучения используется двухволновой инжекционный полупроводниковый лазер 3, обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных 11972 1 2009.06.30 диодов 3 достигает значений 20-100 нм, а стабильность разностной длины волны обеспечивается синхронизацией электронно-оптических процессов в активной области лазера и значительно превышает стабильность разности длин волн двух отдельно взятых лазеров. Дальномер работает следующим образом. Двухволновой лазер 1 направляет на исследуемую область пространства непрерывное оптическое излучение на двух различных длинах волн 1, 2, частоты которых 1 и 2 соответственно. Излучение от лазера попадает на спектральный селектор 2, где происходит пространственное разделение излучения на два пучка, в одном концентрируется излучение на частоте 1, в другом - на частоте 2. Светоделители 3 выделяют часть зондирующего излучения для формирования гетеродинного оптического сигнала на частотах 1 и 2, которые после прохождения блока частотного сдвига 5 (построенного, например, с использованием акустооптического модулятора) сдвигаются по частоте на . Таким образом, на дистанцию посылают два параллельных зондирующих луча на частотах 1 и 2, сдвинутых в пространстве вдоль линии сканирования на расстояние , и осуществляется сканирование этими лучами заданной области пространства с угловой скоростью , как показано на фиг. 2. Отраженное от поверхности объектов, попавших в поле зрения, оптическое излучение на частотах 1 и 2 сдвигается по частоте по сравнению с зондирующим сигналом на доплеровские частоты 1, 2 соответственно, которые имеют следующие значения 121,222,(1) где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,с - скорость света,- угол наклона поверхности к направлению лазерного луча. Отраженное оптическое излучение, имеющее доплеровский сдвиг частоты, проходя через светоделители 4, совмещается с гетеродинным излучением и попадает на фотоприемники 6, 7, причем излучения на частоте 1 попадают на первый фотоприемник 6, а на частоте 2 - на второй фотоприемник 7. В результате фотогетеродинирования на фотоприемниках 6, 7 выделяются разностные частоты 1 и 2 соответственно. Сдвиг частоты гетеродинного излучения на величинунеобходим для определения знака доплеровского сдвига частот 1, 2. С выходов фотоприемников 6, 7 электрические сигналы попадают в блок измерения доплеровских сдвигов частоты 8, где происходит измерение его параметров. В блоке 8 измеряются значения доплеровских частот 1, 2, обусловленные радиальной скоростью движения точки поверхности , которая связана с линейной скоростью сканирования лазерного лучаследующим образом(2), где- угол наклона поверхности к направлению лазерного луча (фиг. 2). Код измеренных частот поступает в вычислительный блок 9, который производит обработку сигнала по следующему алгоритму. По значениям доплеровских частот 1, 2 определяется величина и знак радиальной скорости(фактически угол наклона поверхности к направлению лазерного луча), соответствующей различным точкам поверхности сканируемого объекта, по формулам где ,1, 2, 3 - порядковый номер точки поверхности сканируемого объекта. Значения,записываются в вычислительный блок 9, при этом для каждого значения радиальной скорости фиксируется соответствующее значение времени появления доплеровского сигнала , . Как следует из формул (1) и видно из фиг. 2, в зависимости от угла наклона касательной в точке падения луча к линии направления лазерного луча, знак радиальной скорости 11972 1 2009.06.30 может быть как положительный (линии АВ, ЕН на фиг. 2), так и отрицательный (линияна фиг. 2). При нулевом значении(линии ВС,на фиг. 2) касательная к поверхности будет расположена перпендикулярно к направлению лазерного луча. На фиг. 3 представлена зависимость величины радиальной скоростиот времени при сканировании поверхности, показанной на фиг. 2, при этом на фиг. 3 а - для луча с частотой 1, а на фиг. 3 б - для луча с частотой 2. Очевидно, что точки поверхности с одинаковым углом наклона касательнойдадут одинаковые значения радиальной скоростидля каждого из зондирующих лучей. Однако так как зондирующие лучи раздвинуты в пространстве на расстояние , то время появления этих сигналов будет разное, причем разность времен появления сигналов(фиг. 3 - 1, 2, 3) будет определять расстояние до измеряемой точки поверхности. Таким образом, дальность до измеряемой точки сканируемой области пространства определяется по формуле где- угловая скорость сканирования заданной области пространства,- разность времен появления доплеровских сигналов на частотах 1 и 2, показывающих одинаковые значения радиальной скорости измеряемой точки сканируемой области пространства. Из алгоритма работы заявляемого объекта следует по значениям доплеровских частот 1, 2 отраженного излучения определяется величина и знак радиальной скороститочки падения лучей (фактически угол наклона поверхности к направлению лазерного луча),при этом для вычисления дальности необходимо лишь определить разностьвремен прохождения данной точки лучами 1 и 2. Следовательно, погрешность измерения дальности будет определяться точностью измеренияпри известных значениях угловой скорости сканированияи расстояния между зондирующими лучами . В известном способе измерения расстояний 2 дальность определяется по времени задержки излучения на дистанции, в то время как в предложенном способе для измерения дальности определяется доплеровский сдвиг частоты, обусловленный радиальной скоростью движения точки поверхности при ее сканировании. Очевидно, что значение частоты можно измерить более точно, чем величину малых временных интервалов, за счет чего достигается повышение точности измерения дальности. Кроме того, в заявляемом способе точность повышается также за счет независимости результата измерения расстояния от амплитуды дистанционного сигнала, так как погрешность измерения частоты не зависит от амплитуды сигнала. Таким образом, использование в качестве источника зондирующего излучения в лазерном дальномере двухволнового полупроводникового лазера, обеспечивающего одновременную генерацию излучения на двух различных оптических длинах волн, а также использование соответствующего алгоритма обработки дистанционных сигналов, позволяет по сравнению с 2 обеспечить возможность измерять дальность до всех точек объекта с высокой точностью при минимальном времени измерений и повысить точность определения профиля объектов. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01C 3/08
Метки: посредством, двухволнового, объекта, дальности, измерения, лазера, способ
Код ссылки
<a href="https://by.patents.su/5-11972-sposob-izmereniya-dalnosti-do-obekta-posredstvom-dvuhvolnovogo-lazera.html" rel="bookmark" title="База патентов Беларуси">Способ измерения дальности до объекта посредством двухволнового лазера</a>
Способ измерения дальности до объекта
Номер патента: 5991
Опубликовано: 30.03.2004
Авторы: Михайлов Анатолий Борисович, Савченко Владимир Дмитриевич
МПК: G01C 3/08
Метки: измерения, способ, дальности, объекта
Текст:
...электрических цепей и т.д. не представляется возможным. В результате постоянной подачи питающего напряжения на ФПУ снижается такой показатель надежности дальномерной системы, как наработка на отказ, поскольку этот параметр самого ФПУ может быть невысоким. Кроме того, при совместной работе множества дальномерных систем, например в боевой обстановке, происходит нежелательное влияние их друг на друга через постоянно запитанные ФПУ,...
Способ измерения дальности объекта (варианты)
Номер патента: 4677
Опубликовано: 30.09.2002
Авторы: Коростик Константин Николаевич, Кугейко Михаил Михайлович
МПК: G01C 3/08, G01S 17/10
Метки: измерения, объекта, варианты, дальности, способ
Текст:
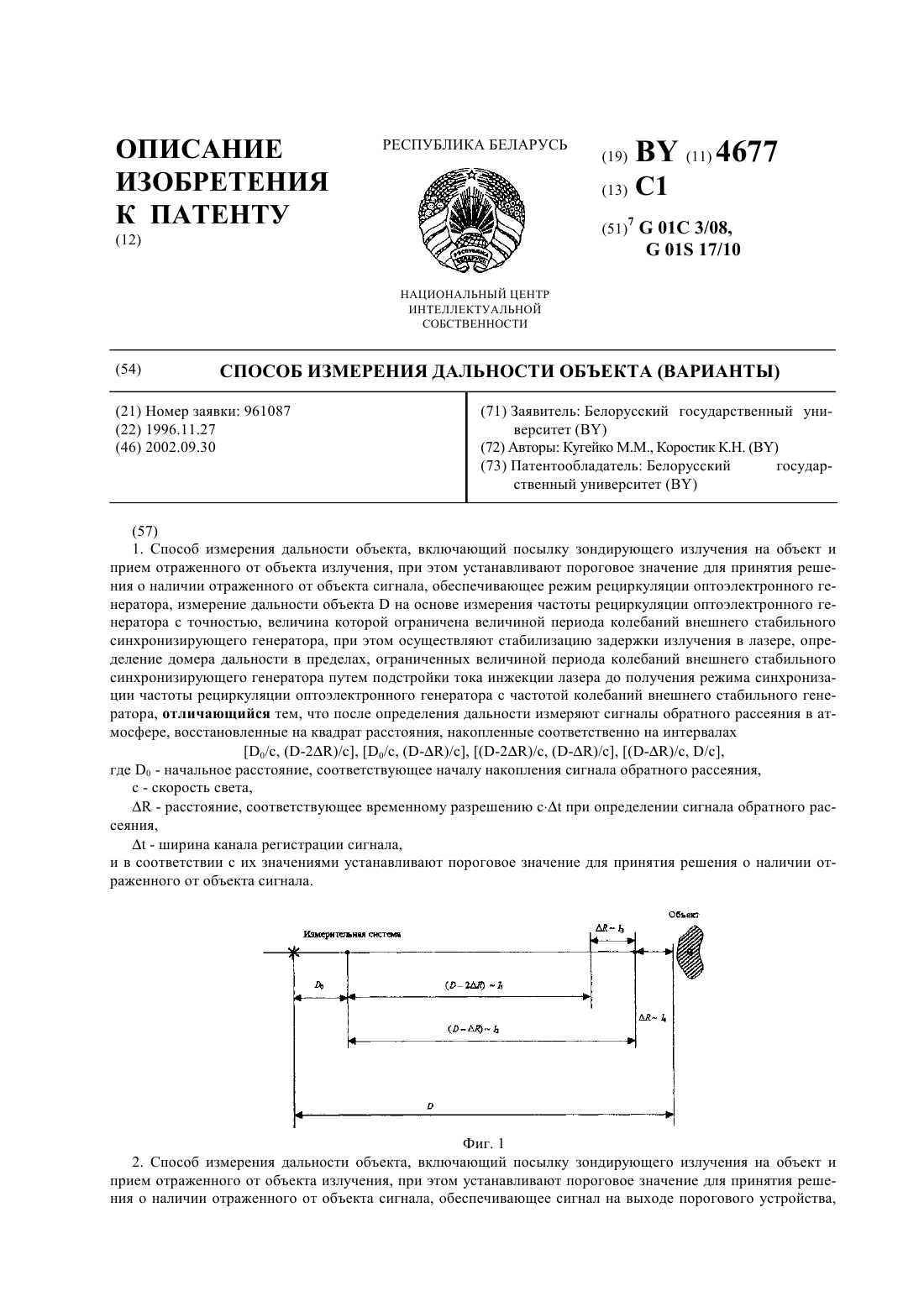
...скорректированный на ослабление в среде сигнал, не зависящий от состояния среды. Устанавливая порог принятия решения о наличии отраженного излучения в соответствии с (7), таким образом исключается временная неопределенность появления импульсного отклика на выходе фотоприемника,обусловленная ослаблением излучения в атмосфере. Другими словами, исключается влияние изменения состояния среды на определение дальности до объекта, тем самым...
Устройство измерения длины волны излучения двухволнового лазера

Номер патента: U 4137
Опубликовано: 28.02.2008
Автор: Козлов Владимир Леонидович
МПК: G01J 3/00
Метки: излучения, двухволнового, лазера, волны, устройство, измерения, длины
Текст:
...11. Устройство работает следующим образом. Исследуемый когерентный оптический сигнал на длинах волн 1, 2 от источника излучения 1 (двухволнового лазера) модулируется по амплитуде модулятором 2, управляемым сигналом с генератора 7. Модулированное оптическое излучение поступает в дисперсионный волоконный оптический световод 3. После прохождения световода излучение попадает на спектральный селектор 9, где происходит пространственное...
Способ определения дальности до объекта и его скорости
Номер патента: 11960
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01P 3/36, G01S 17/00, G01C 3/08...
Метки: дальности, скорости, способ, определения, объекта
Текст:
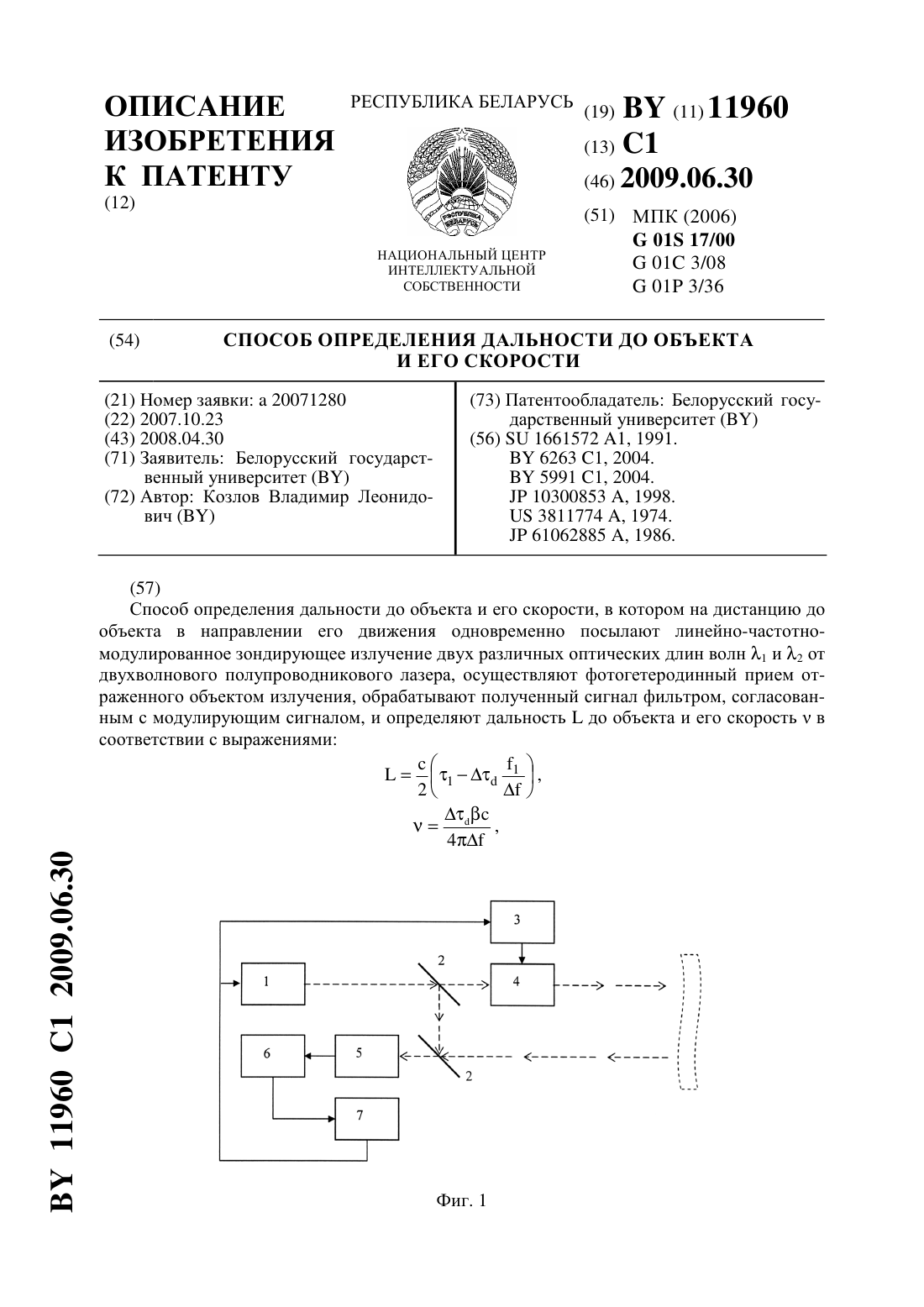
...Для обеспечения возможности одновременного определения за один зондирующий импульс дальности и скорости объекта в качестве источника зондирующего излучения предлагается использовать двухволновой инжекционный полупроводниковый лазер 2,обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных диодов 3 достигает значений 20-100 нм....
Устройство управления длиной волны излучения двухволнового лазера
Номер патента: 10055
Опубликовано: 30.12.2007
Автор: Козлов Владимир Леонидович
МПК: G01J 3/12
Метки: управления, устройство, излучения, волны, лазера, длиной, двухволнового
Текст:
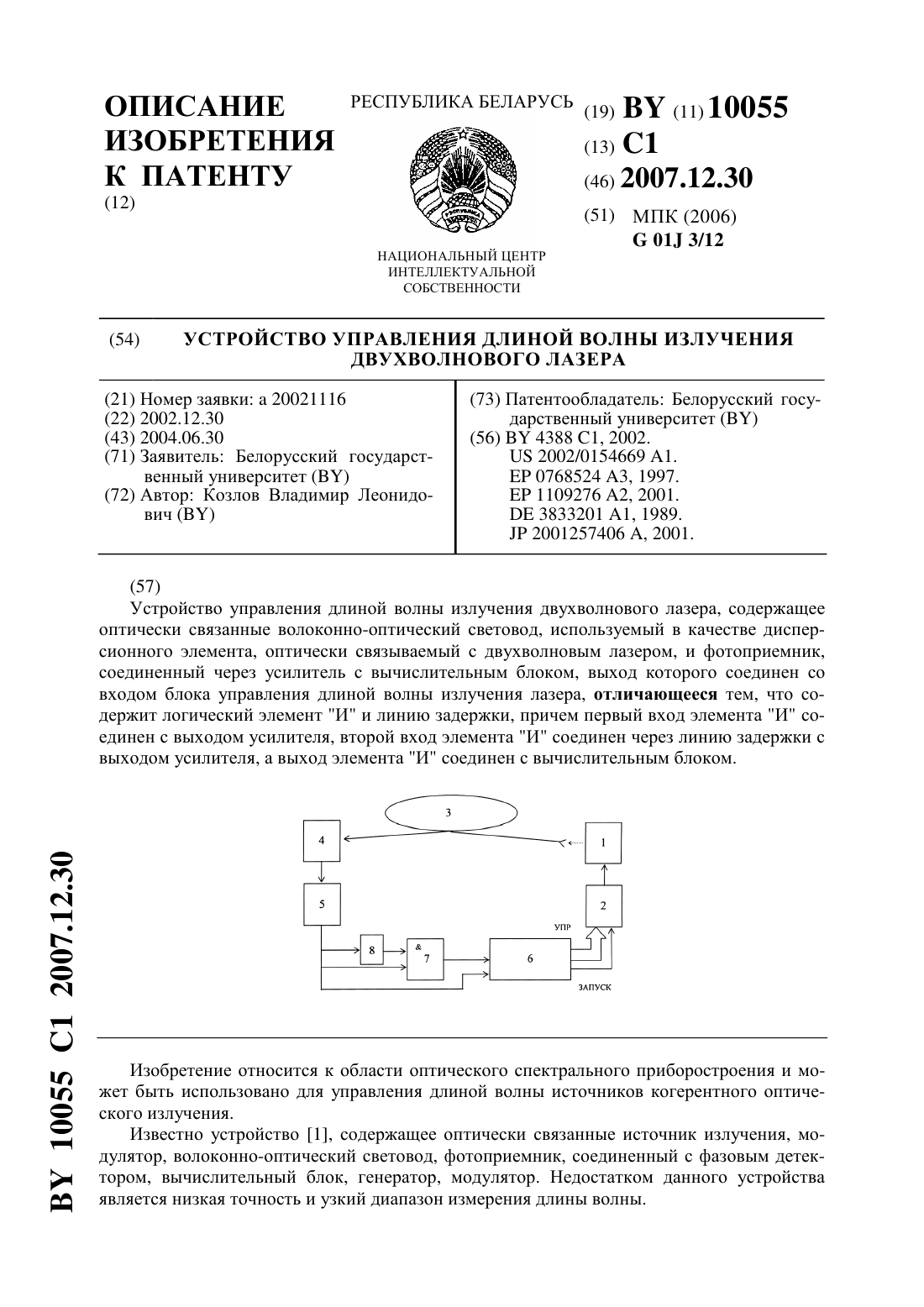
...лазер на длине волны 1, а импульс на длине волны 2 запускает лазер на 2. Таким образом, при замкнутой петле оптической обратной связи в системе устанавливается процесс рециркуляции, периодкоторой определяется оптической задержкой излучения в световоде 3 при постоянной электрической задержке в блоках 2, 4, 5, 6. В световод поочередно посылаются оптические импульсы на различных длинах волн 1 и 2,поэтому в устройстве реализуется режим...
Предыдущий патент: Способ лечения хронического простатита
Следующий патент: Устройство для умножения унитарных кодов по модулю три
Случайный патент: Способ приготовления заварного ржаного хлеба