Система автоматизации рабочего процесса скрепера
Номер патента: 13302
Опубликовано: 30.06.2010
Авторы: Афхами Алишах Али Асгар, Джалилванд Эхсан, Щемелёв Анатолий Мефодьевич
Текст
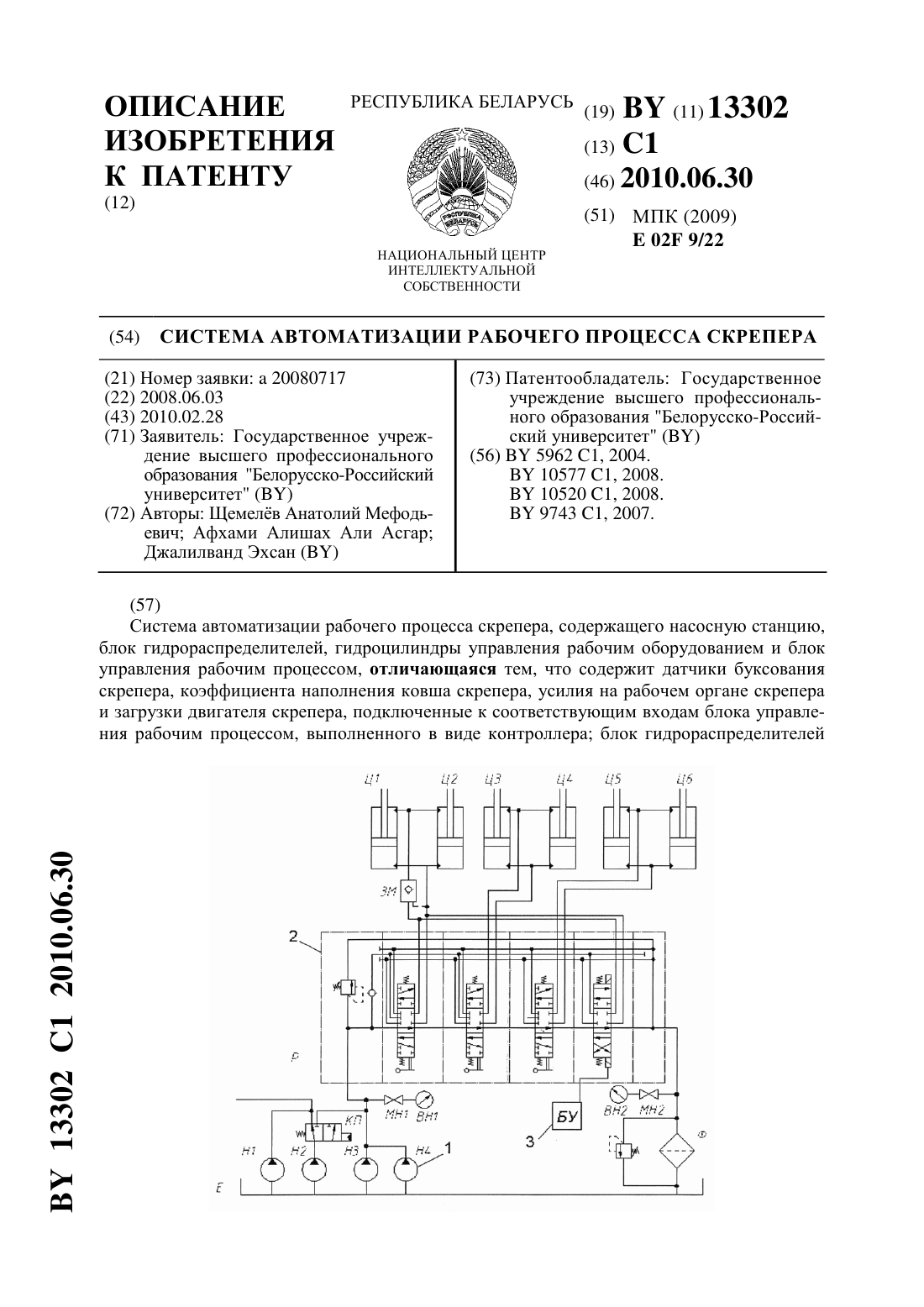
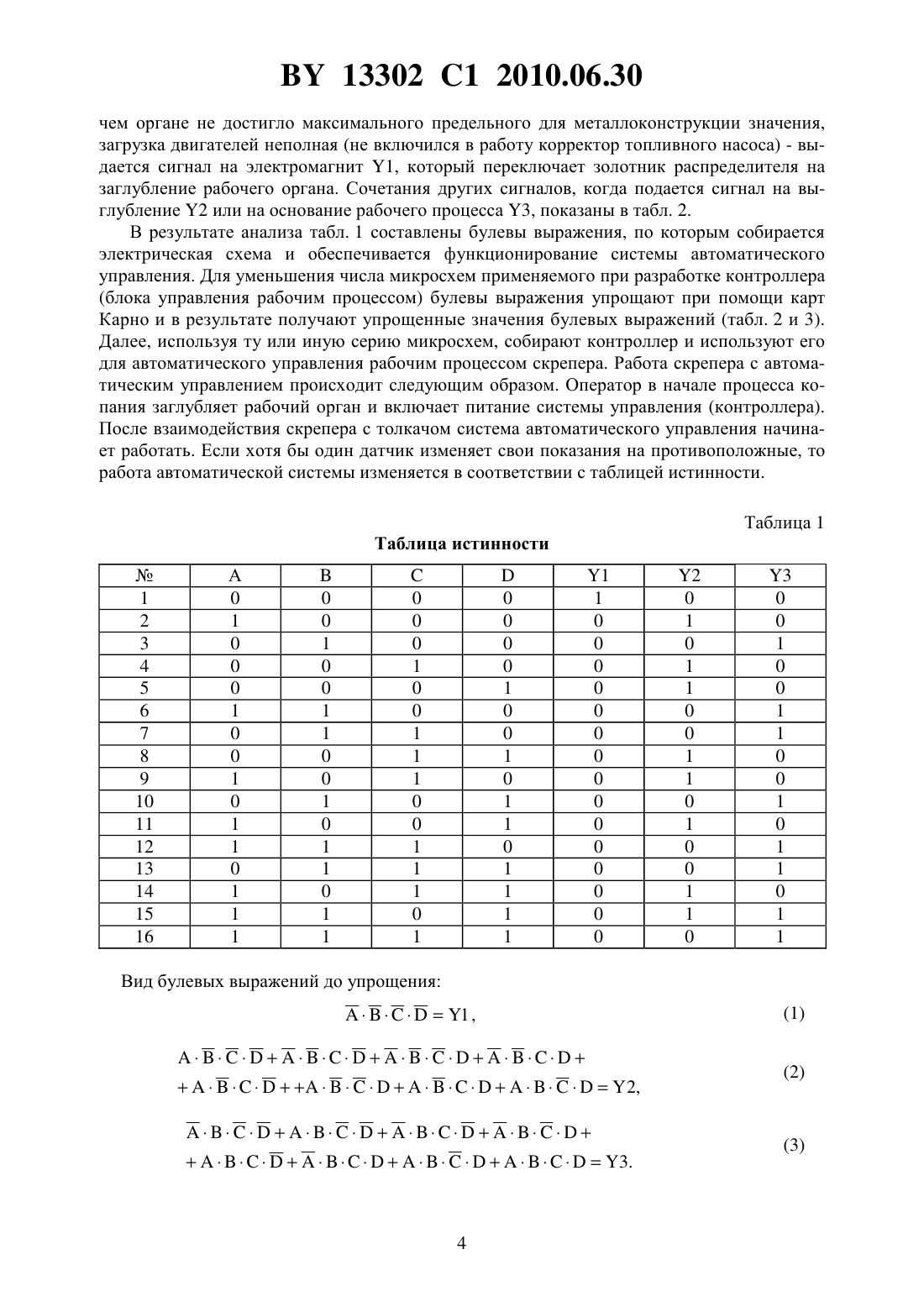
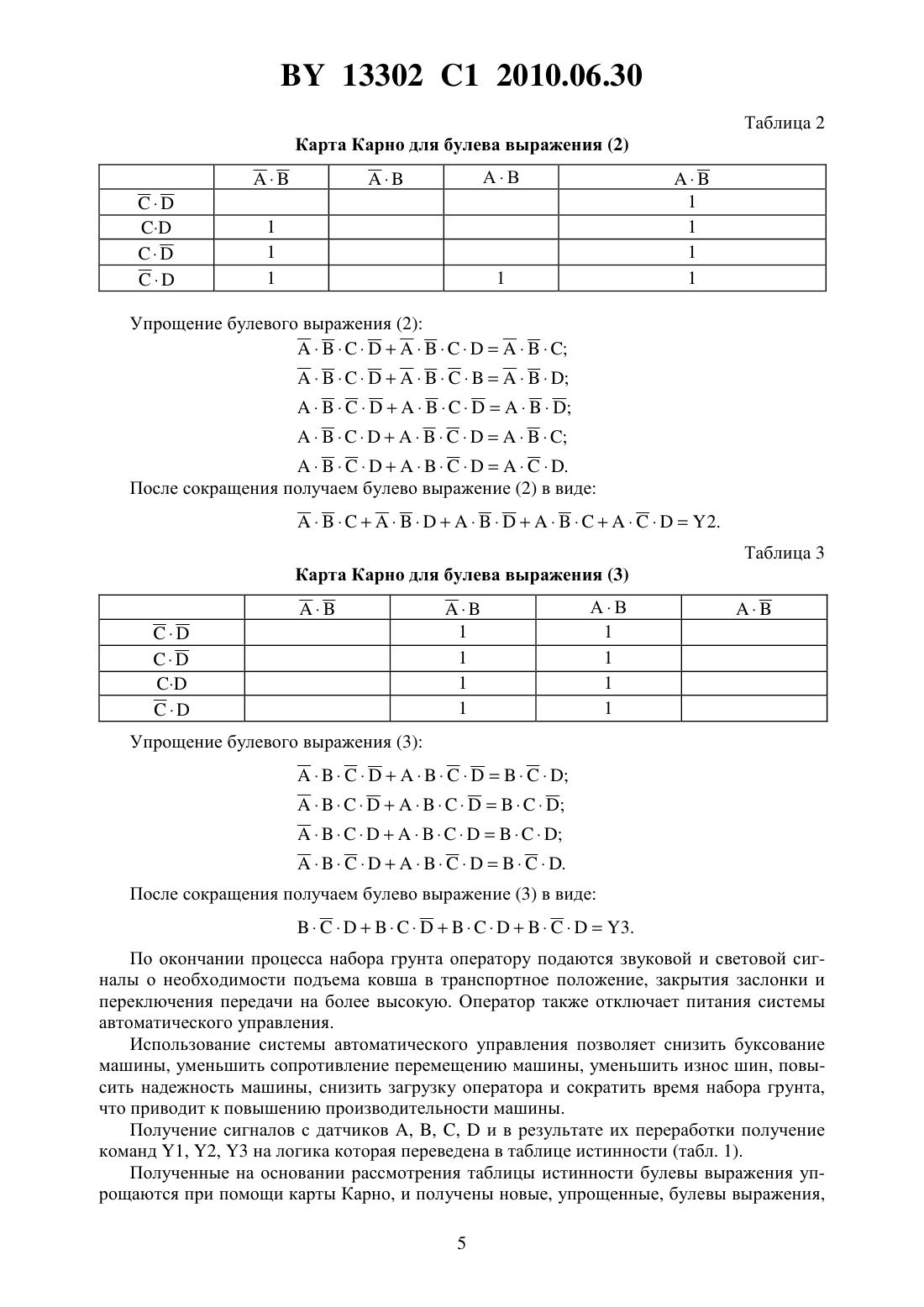
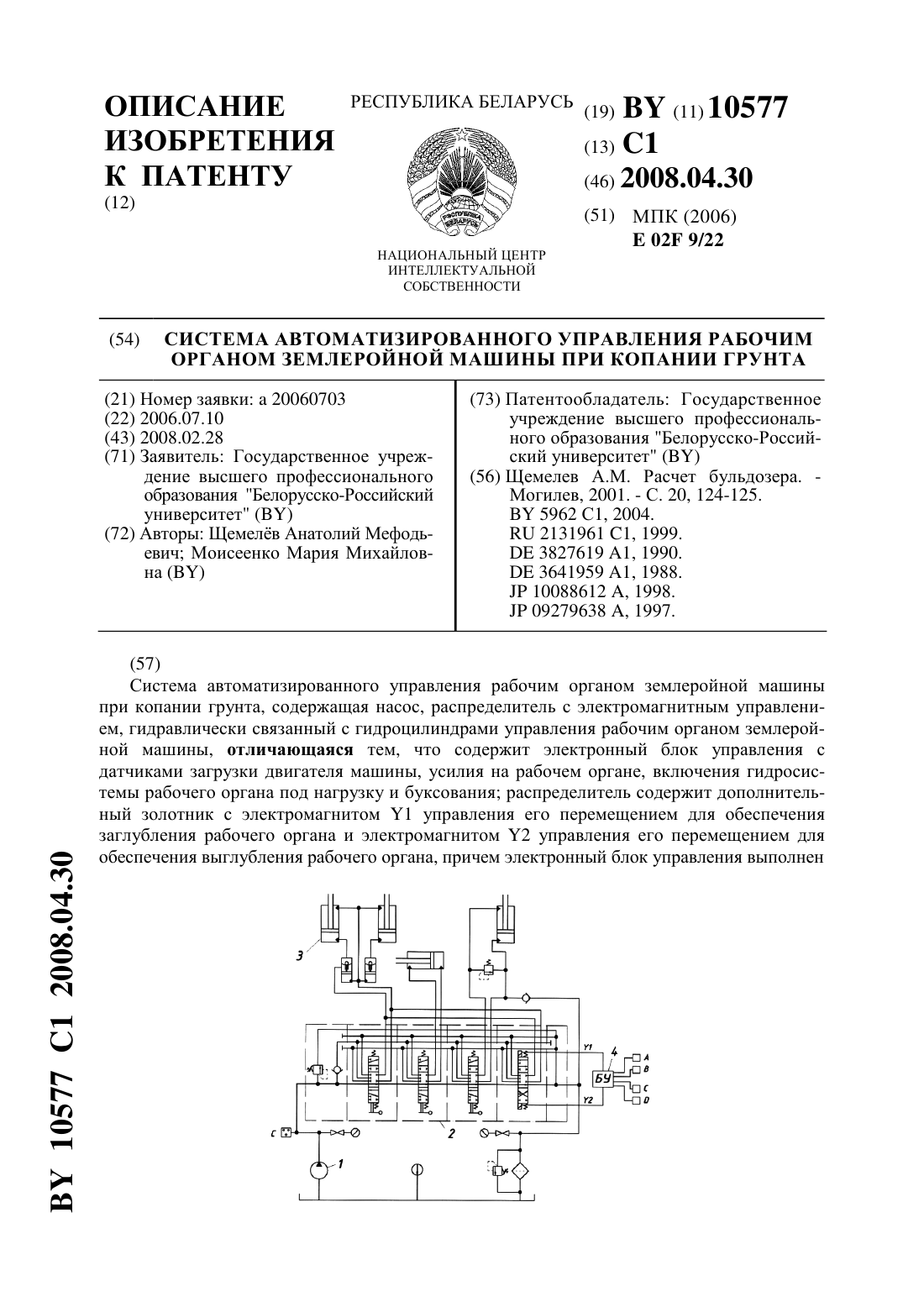
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА АВТОМАТИЗАЦИИ РАБОЧЕГО ПРОЦЕССА СКРЕПЕРА(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Щемелв Анатолий Мефодьевич Афхами Алишах Али Асгар Джалилванд Эхсан(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) Система автоматизации рабочего процесса скрепера, содержащего насосную станцию,блок гидрораспределителей, гидроцилиндры управления рабочим оборудованием и блок управления рабочим процессом, отличающаяся тем, что содержит датчики буксования скрепера, коэффициента наполнения ковша скрепера, усилия на рабочем органе скрепера и загрузки двигателя скрепера, подключенные к соответствующим входам блока управления рабочим процессом, выполненного в виде контроллера блок гидрораспределителей 13302 1 2010.06.30 содержит трехпозиционный распределитель с электромагнитным управлением, гидравлически соединенный с гидроцилиндрами управления ковшом скрепера, причем блок управления рабочим процессом выполнен с возможностью управления электромагнитами 1,2 и 3 трехпозиционного распределителя по сигналам упомянутых датчиков в соответствии с булевыми выражениями 1 для обеспечения заглубления рабочего органа скрепера,2 для обеспечения выглубления рабочего органа скрепера и 3 для подачи оператору звукового и светового сигналов на осуществление подъема рабочего оборудования скрепера в транспортное положение,где А - сигнал датчика буксования скрепера В - сигнал датчика коэффициента наполнения ковша скрепера С - сигнал датчика усилия на рабочем органе скрепера- сигнал датчика загрузки двигателя скрепера. Изобретение относится к области строительных и дорожных машин и может быть использовано на самоходных и полуприцепных скреперах. Известна система управления скрепером 1, которая включает насосную станцию,гидроцилиндры рабочего оборудования и фильтр с гидробаком. Особенностью этой системы является ручное управление рабочим процессом машины,что приводит к увеличению времени цикла, так как оператор не всегда объективно воспринимает информацию о более чем двух переменных о состоянии рабочего процесса и запаздывает с принятием решения о выглублении или заглублении рабочего органа машины. Известна система управления рабочим оборудованием скрепера 2, включающая насосную станцию, блок распределителей, гидроцилиндры рабочего оборудования и блок управления рабочим процессом, которая обеспечивает работу скрепера в автоматическом режиме. Особенностью такой конструкции является отсутствие информации о степени наполнения ковша скрепера, которую оператор не всегда может объективно оценить вследствие того, что передняя заслонка закрывает обзор грунта, находящегося в ковше скрепера. Оператор наблюдает за наполнением ковша через прорези, выполненные в верхней части заслонки. Если эти прорези забиваются грунтом, то оператор принимает решение о подъеме ковша в транспортное положение, когда начинается пересыпание грунта из ковша через боковую стенку. При этом происходит попадание камней и грунта на шток гидроцилиндра, его повреждение и повреждение гидросистемы скрепера. Не всегда при этом передняя заслонка остается заполненной грунтом. Задача изобретения - повышение производительности скрепера за счет снижения времени цикла. Система автоматизации рабочего процесса скрепера, содержащего насосную станцию,блок гидрораспределителей, гидроцилиндры управления рабочим оборудованием и блок управления рабочим процессом, отличается тем, что содержит датчики буксования скрепера, коэффициента наполнения ковша скрепера, усилия на рабочем органе скрепера и загрузки двигателя скрепера, подключенные к соответствующим входам блока управления рабочим процессом, выполненного в виде контроллера блок гидрораспределителей содержит трехпозиционный распределитель с электромагнитным управлением, гидравлически соединенный с гидроцилиндрами управления ковшом скрепера, причем блок управления рабочим процессом выполнен с возможностью управления электромагнитами 1,2 и 3 трехпозиционного распределителя по сигналам упомянутых датчиков в соответствии с булевыми выражениями 1 для обеспечения заглубления рабочего 2 13302 1 2010.06.30 органа скрепера,2 для обеспечения выглубления рабочего органа скрепера и 3 для подачи оператору звукового и светового сигналов на осуществление подъема рабочего оборудования скрепера в транспортное положение,где А - сигнал датчика буксования скрепера В - сигнал датчика коэффициента наполнения ковша скрепера С - сигнал датчика усилия на рабочем органе скрепера- сигнал датчика загрузки двигателя скрепера. Наличие датчиков буксования скрепера, датчиков коэффициента наполнения ковша скрепера, датчика усилия на рабочем органе скрепера и загрузки двигателя скрепера обеспечивает получение информации о рабочем процессе скрепера. Обычно эту информацию получает оператор скрепера при помощи своих органов чувств (зрения, слуха) и принимает решение о заглублении или выглублении рабочего органа. Передача информации на блок управления (контроллер) обеспечивает переработку им информации и выдачу управляющего сигнала на соответствующий электромагнит. Наличие в блоке гидрораспределителей трехпозиционного распределителя с электромагнитным управлением обеспечивает управление процессом выглубления или заглублением ковша без вмешательства оператора. Выдача сигнала от контроллера на соответствующие электромагниты 1, 2, 3 обеспечивается при сочетании сигналов датчиков в соответствии с таблицей истинности. Сигнал 1 на заглубление рабочего органа поступает, когда после включения питания датчиков от всех их поступает нулевой сигнал. Сочетания сигналов, при которых поступает сигнал на электромагниты 2 и 3, приведены в табл. 1 истинности. Применение датчиков буксования (сигнал А - установка тахогенераторов на ведущие и ведомые колеса тягача) позволяет получить сигнал о буксовании с заданным коэффициентом буксования. Наличие датчика коэффициента наполнения ковша позволяет при заданном значении коэффициента наполнения ковша скреперов произвести подъем ковша в транспортное положение. Наличие датчика С усилия на рабочем органе позволяет ограничить напряженнодеформируемое состояние металлоконструкции скрепера при использовании толкача большой мощности. Наличие датчиказагрузки двигателя позволяет при переходе работы двигателя с регуляторного на корректорный режим снизить загрузку двигателя путем снижения нагрузки на рабочем органе. Сочетание соответствующих сигналов с датчиков позволяет заглублять или выглублять рабочий орган или подавать звуковой и световой сигнал о конце процесса заполнения ковша. Сущность изобретения поясняется фигурой и таблицами. На фигуре показана гидравлическая схема скрепера, в табл. 1 приведена таблица истинности функционирования системы автоматического управления скрепера. В табл. 2 приведена карта Карно для упрощения булева выражения (2). В табл. 3 приведена карта Карно для упрощения булева выражения (3). Гидросистема скрепера (фигура) состоит из насосной станции, распределительного блока 2 и блока управления рабочим процессом 3. Один из золотников блока распределителей 2 выполнен с электромагнитным управлением. Получить и передать управляющий сигнал наиболее легко электрическим методом. Объединение ручного и электрического сигналов на одном золотнике распределителя 2 может привести к травме оператора при срабатывании электромагнита, поэтому управление гидроцилиндрами подъема-опускания ковша сдублировано. Таблица истинности (табл. 1) показывает, при каких сочетаниях сигналов датчиков подается тот или иной сигнал на исполнительное устройство. Например, при всех нулевых сигналах от всех четырех датчиков буксование отсутствует, коэффициент наполнения не достиг заданного значения (ковш не наполнен полностью), усилие на рабо 3 13302 1 2010.06.30 чем органе не достигло максимального предельного для металлоконструкции значения,загрузка двигателей неполная (не включился в работу корректор топливного насоса) - выдается сигнал на электромагнит 1, который переключает золотник распределителя на заглубление рабочего органа. Сочетания других сигналов, когда подается сигнал на выглубление 2 или на основание рабочего процесса 3, показаны в табл. 2. В результате анализа табл. 1 составлены булевы выражения, по которым собирается электрическая схема и обеспечивается функционирование системы автоматического управления. Для уменьшения числа микросхем применяемого при разработке контроллера(блока управления рабочим процессом) булевы выражения упрощают при помощи карт Карно и в результате получают упрощенные значения булевых выражений (табл. 2 и 3). Далее, используя ту или иную серию микросхем, собирают контроллер и используют его для автоматического управления рабочим процессом скрепера. Работа скрепера с автоматическим управлением происходит следующим образом. Оператор в начале процесса копания заглубляет рабочий орган и включает питание системы управления (контроллера). После взаимодействия скрепера с толкачом система автоматического управления начинает работать. Если хотя бы один датчик изменяет свои показания на противоположные, то работа автоматической системы изменяется в соответствии с таблицей истинности. Таблица 1 Таблица истинности Вид булевых выражений до упрощения 1 ,2,3. 13302 1 2010.06.30 Таблица 2 Карта Карно для булева выражения (2) Упрощение булевого выражения (2). После сокращения получаем булево выражение (2) в виде 2. Таблица 3 Карта Карно для булева выражения (3) Упрощение булевого выражения (3). После сокращения получаем булево выражение (3) в виде 3. По окончании процесса набора грунта оператору подаются звуковой и световой сигналы о необходимости подъема ковша в транспортное положение, закрытия заслонки и переключения передачи на более высокую. Оператор также отключает питания системы автоматического управления. Использование системы автоматического управления позволяет снизить буксование машины, уменьшить сопротивление перемещению машины, уменьшить износ шин, повысить надежность машины, снизить загрузку оператора и сократить время набора грунта,что приводит к повышению производительности машины. Получение сигналов с датчиков , , ,и в результате их переработки получение команд 1, 2, 3 на логика которая переведена в таблице истинности (табл. 1). Полученные на основании рассмотрения таблицы истинности булевы выражения упрощаются при помощи карты Карно, и получены новые, упрощенные, булевы выражения, 5 13302 1 2010.06.30 разработка по которым схем контроллера позволяет обойтись минимальным количеством микросхем. Использование электронного управления рабочим процессом позволяет сократить время набора грунта ковшом скрепера, т.к. оператор получает информацию через зрение,слух и получение информации визуально задерживает время переработки информации, и оператор при ручном управлении рабочим органом увеличивает время цикла. 1. Щемелев Проектирование гидропривода машины для земляных работ. - Могилев, 1995. - С. 157, рис. 3.10. 2. Патент РБ 5962, 2004. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: E02F 9/22
Метки: рабочего, система, скрепера, процесса, автоматизации
Код ссылки
<a href="https://by.patents.su/6-13302-sistema-avtomatizacii-rabochego-processa-skrepera.html" rel="bookmark" title="База патентов Беларуси">Система автоматизации рабочего процесса скрепера</a>
Система автоматизации рабочего процесса бульдозера
Номер патента: 10520
Опубликовано: 30.04.2008
Авторы: Щемелёв Анатолий Мефодьевич, Около-Кулак Татьяна Анатольевна
МПК: E02F 9/22
Метки: автоматизации, рабочего, бульдозера, система, процесса
Текст:
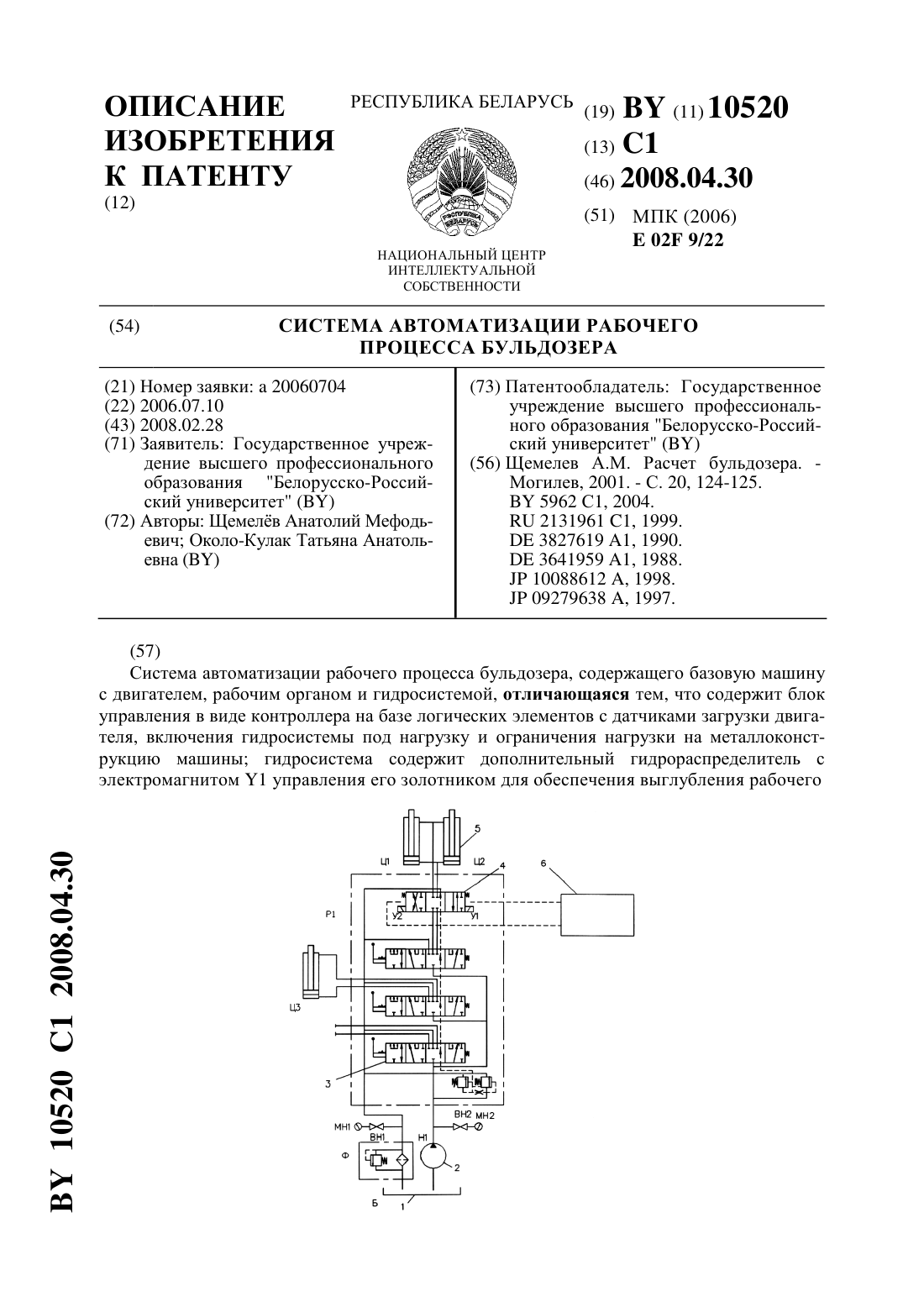
...работой бульдозера по трем критериям работой машины по загрузке двигателя работой гидросистемы под нагрузкой, т.е. вмешательства оператора в работу управления гидросистемой и по ограничению нагрузки на металлоконструкцию бульдозера. Как правило, оператор принимает решение о коррекции работы системы управления только по одному-двум сигналам. Причем установка датчика А, дающего сигнал о загрузке двигателя, обеспечивает работу двигателя на...
Система снижения буксования тягача скрепера
Номер патента: 12376
Опубликовано: 30.10.2009
Авторы: Науменко Анатолий Евгеньевич, Щемелев Анатолий Мефодьевич
МПК: E02F 9/22
Метки: система, тягача, снижения, буксования, скрепера
Текст:
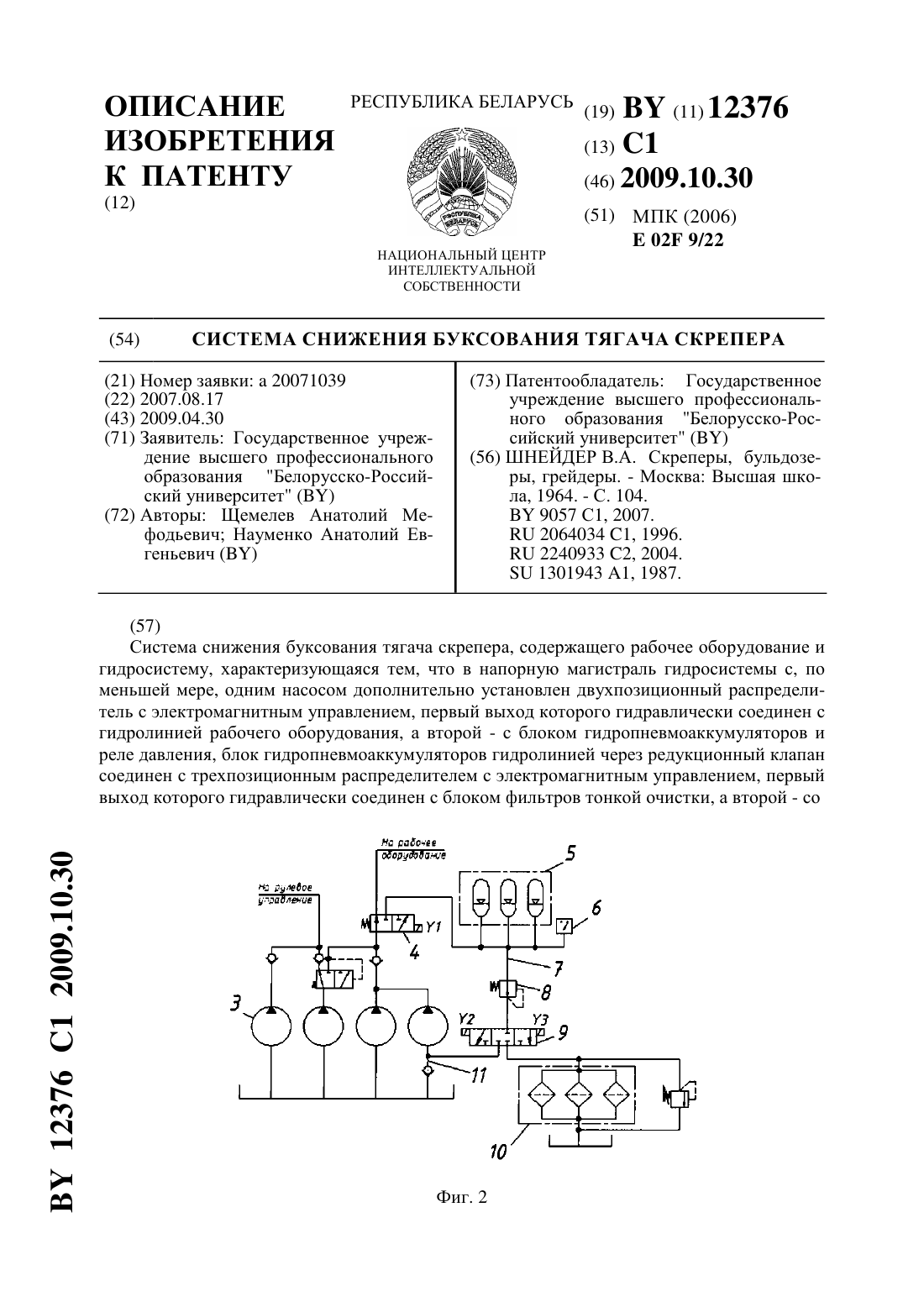
...гидропневмоаккумуляторов, при 2 12376 1 2009.10.30 этом снижается величина крутящего момента, идущего на привод ведущих колес тягача,при соответствующем отборе крутящего момента сила тяги по двигателю снижается до величины силы тяги по сцеплению и буксование прекращается или значительно снижается, при этом происходит зарядка гидропневмоаккумуляторов, энергия которых используется по мере надобности или на снижение загрузки двигателя при...
Система энергосбережения скрепера

Номер патента: 6428
Опубликовано: 30.09.2004
Авторы: Подымако Максим Эдуардович, Щемелёв Анатолий Мефодьевич, Леоненко Олег Викторович
МПК: E02F 9/22
Метки: система, энергосбережения, скрепера
Текст:
...в гидросистеме энергосбережения, направлять поток жидкости на два потребителя, что позволяет снизить давление в гидросистеме. Установка дополнительного насоса малой производительности обеспечивает запитку ограничителя подачи нагрузочного гидронасоса. Наличие регулятора потока, управляемого от педали тормоза, обеспечивает регулирование давления в гидролинии регулятора насоса, а значит и величину расхода насоса с ограничителем подачи и в...
Система автоматизированного управления рабочим органом землеройной машины при копании грунта
Номер патента: 10577
Опубликовано: 30.04.2008
Авторы: Моисеенко Мария Михайловна, Щемелёв Анатолий Мефодьевич
МПК: E02F 9/22
Метки: рабочим, землеройной, автоматизированного, машины, грунта, система, копании, органом, управления
Текст:
...двигателя переходит с регуляторного на корректорный и при заглублении рабочего органа резко возрастает нагрузка на двигателе, что может привести к его останову. Информация об усилии на рабочем органе дает информацию о том, что возможна перегрузка 2 10577 1 2008.04.30 рабочего органа, что снижает долговечность конструкции. Наличие датчика буксования машины информирует о том, что возникает ситуация, которая вызывает необходимость выглублять...
Ограничитель буксования тягача скрепера
Номер патента: 12064
Опубликовано: 30.06.2009
Автор: Щемелёв Анатолий Мефодьевич
МПК: B60K 17/00, E02F 9/00
Метки: буксования, тягача, скрепера, ограничитель
Текст:
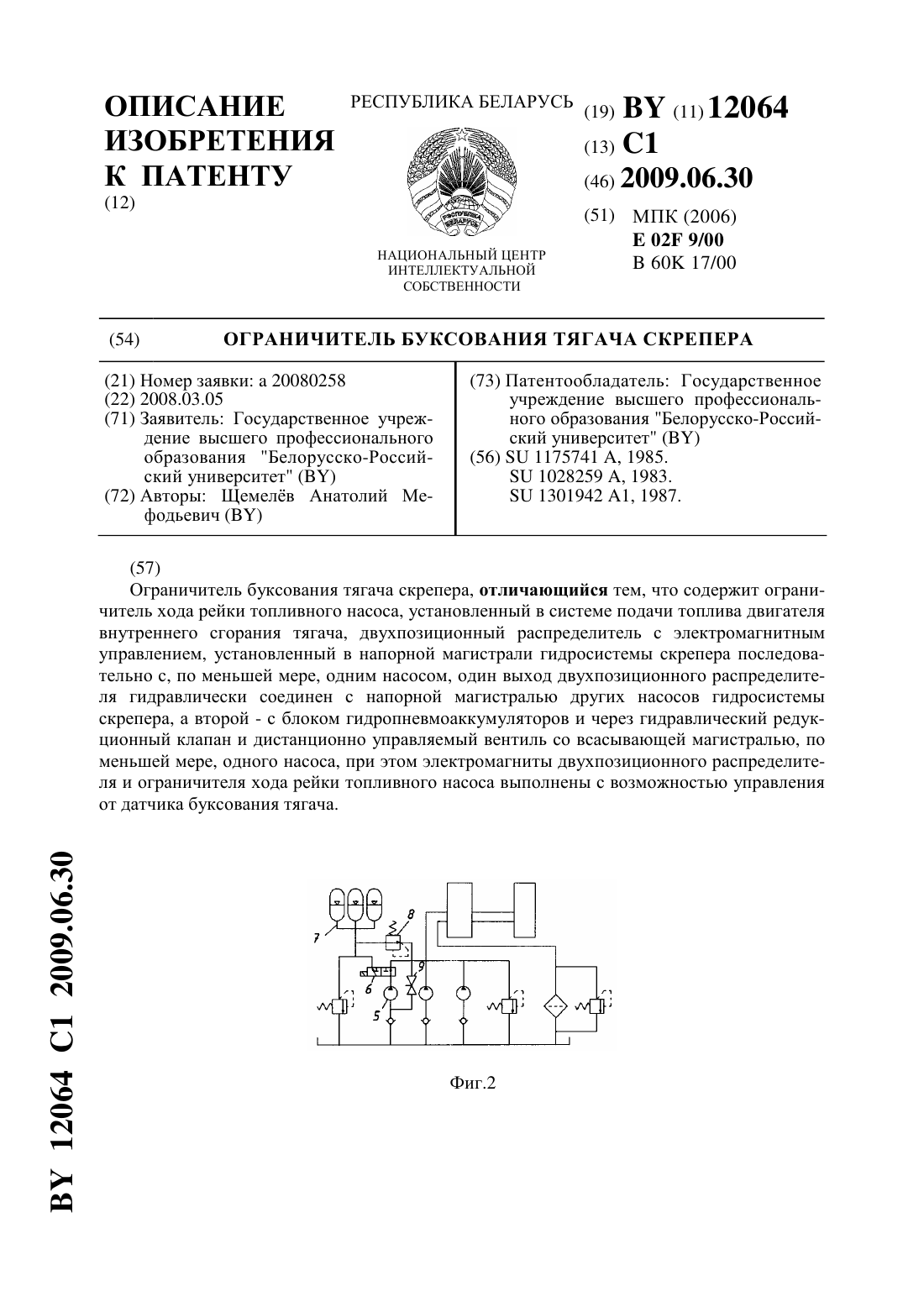
...обеспечивает использование мощности двигателя,передаваемой обычно на колеса для их зарядки, уменьшая тем самым величину крутящего момента на колесах тягача. Установка редукционного клапана позволяет подавать на вход одного или более насосов постоянной мощности без скачков давления на гидроаккумуляторе, независимо от частоты вращения коленчатого вала двигателя, направляя рабочую жидкость на вход одного или более насосов....
Предыдущий патент: Вибрационно-частотный динамометр
Следующий патент: Способ получения консерванта для зеленых кормов
Случайный патент: Расходомер воздуха