Система автоматизированного управления рабочим органом землеройной машины при копании грунта
Номер патента: 10577
Опубликовано: 30.04.2008
Авторы: Моисеенко Мария Михайловна, Щемелёв Анатолий Мефодьевич
Текст
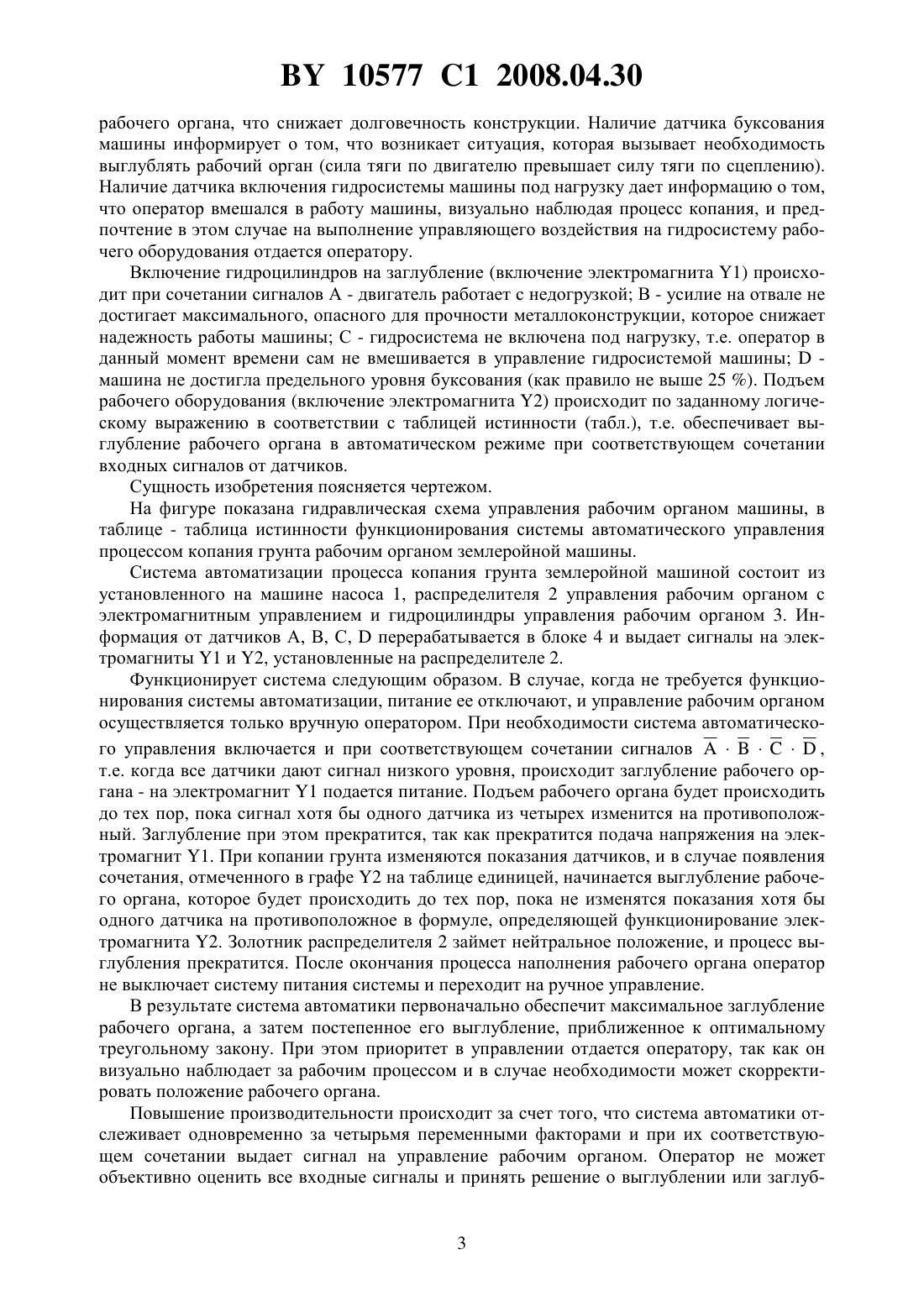
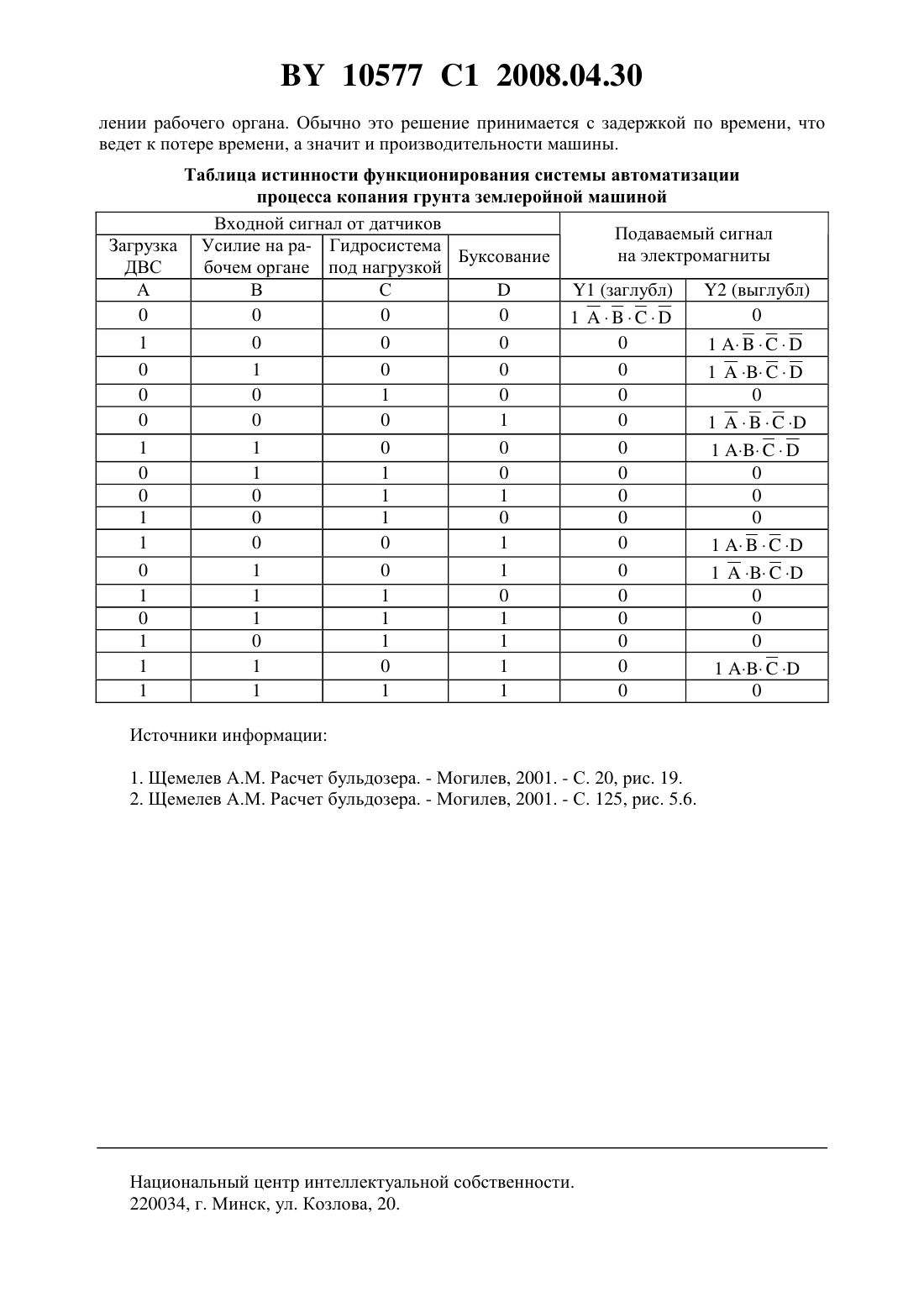
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНОЙ МАШИНЫ ПРИ КОПАНИИ ГРУНТА(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Щемелв Анатолий Мефодьевич Моисеенко Мария Михайловна(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) Система автоматизированного управления рабочим органом землеройной машины при копании грунта, содержащая насос, распределитель с электромагнитным управлением, гидравлически связанный с гидроцилиндрами управления рабочим органом землеройной машины, отличающаяся тем, что содержит электронный блок управления с датчиками загрузки двигателя машины, усилия на рабочем органе, включения гидросистемы рабочего органа под нагрузку и буксования распределитель содержит дополнительный золотник с электромагнитом 1 управления его перемещением для обеспечения заглубления рабочего органа и электромагнитом 2 управления его перемещением для обеспечения выглубления рабочего органа, причем электронный блок управления выполнен 10577 1 2008.04.30 с возможностью подачи напряжения питания на электромагнит 1 при сочетании сигналов датчиков, соответствующих булевому логическому выражению 1 , а на электромагнит 2 - при сочетании сигналов датчиков, соответствующих булевому логическому выражению 2,где А - сигнал датчика загрузки двигателя машины В - сигнал датчика усилия на рабочем органе- сигнал датчика включения гидросистемы рабочего органа под нагрузку- сигнал датчика буксования. Система автоматизации относится к области строительных и дорожных машин и может быть использована на бульдозерах, скреперах и других землеройных машинах. Известна система управления рабочим органом бульдозера, включающая насос, распределитель и гидроцилиндры подъема-опускания рабочего оборудования 1. Ограниченностью такой системы является необходимость высокой квалификации оператора, что связано с одновременным анализом группы факторов работы машины степени наполнения рабочего органа грунтом, степени загрузки двигателя, буксования машины,а в результате загруженности оператора информацией принятие решения оператором о выглублении или заглублении рабочего органа не всегда принимается вовремя. В результате длительности процесса анализа ситуации и принятия решения, а также неточной установки рабочего органа время на копание грунта увеличивается, что приводит к увеличению времени цикла, а значит потери производительности машиной. Известна система автоматизации рабочего процесса копания грунта бульдозером 2. Ограниченностью такой конструкции является возможность выполнения только планировочных работ бульдозером с использованием системы автоматизации. Задачей изобретения является повышение производительности машины. Эта задача достигается тем, что система автоматизированного управления рабочим органом землеройной машины при копании грунта, содержащая насос, распределитель с электромагнитным управлением, гидравлически связанный с гидроцилиндрами управления рабочим органом землеройной машины, согласно изобретению, содержит электронный блок управления с датчиками загрузки двигателя машины, усилия на рабочем органе,включения гидросистемы рабочего органа под нагрузку и буксования распределитель содержит дополнительный золотник с электромагнитом 1 управления его перемещением для обеспечения заглубления рабочего органа и электромагнитом 2 управления его перемещением для обеспечения выглубления рабочего органа, причем электронный блок управления выполнен с возможностью подачи напряжения питания на электромагнит 1 при сочетании сигналов датчиков, соответствующих булевому логическому выражению 1, а на электромагнит 2 - при сочетании сигналов датчиков, соответствующих булевому логическому выражению 2,где А - сигнал датчика загрузки двигателя машины В - сигнал датчика усилия на рабочем органе С - сигнал датчика включения гидросистемы рабочего органа под нагрузку- сигнал датчика буксования. Установка датчика загрузки двигателя обеспечивает информацией о том, что режим работы двигателя переходит с регуляторного на корректорный и при заглублении рабочего органа резко возрастает нагрузка на двигателе, что может привести к его останову. Информация об усилии на рабочем органе дает информацию о том, что возможна перегрузка 2 10577 1 2008.04.30 рабочего органа, что снижает долговечность конструкции. Наличие датчика буксования машины информирует о том, что возникает ситуация, которая вызывает необходимость выглублять рабочий орган (сила тяги по двигателю превышает силу тяги по сцеплению). Наличие датчика включения гидросистемы машины под нагрузку дает информацию о том,что оператор вмешался в работу машины, визуально наблюдая процесс копания, и предпочтение в этом случае на выполнение управляющего воздействия на гидросистему рабочего оборудования отдается оператору. Включение гидроцилиндров на заглубление (включение электромагнита 1) происходит при сочетании сигналов А - двигатель работает с недогрузкой В - усилие на отвале не достигает максимального, опасного для прочности металлоконструкции, которое снижает надежность работы машины С - гидросистема не включена под нагрузку, т.е. оператор в данный момент времени сам не вмешивается в управление гидросистемой машинымашина не достигла предельного уровня буксования (как правило не выше 25 ). Подъем рабочего оборудования (включение электромагнита 2) происходит по заданному логическому выражению в соответствии с таблицей истинности (табл.), т.е. обеспечивает выглубление рабочего органа в автоматическом режиме при соответствующем сочетании входных сигналов от датчиков. Сущность изобретения поясняется чертежом. На фигуре показана гидравлическая схема управления рабочим органом машины, в таблице - таблица истинности функционирования системы автоматического управления процессом копания грунта рабочим органом землеройной машины. Система автоматизации процесса копания грунта землеройной машиной состоит из установленного на машине насоса 1, распределителя 2 управления рабочим органом с электромагнитным управлением и гидроцилиндры управления рабочим органом 3. Информация от датчиков А, В, С,перерабатывается в блоке 4 и выдает сигналы на электромагниты 1 и 2, установленные на распределителе 2. Функционирует система следующим образом. В случае, когда не требуется функционирования системы автоматизации, питание ее отключают, и управление рабочим органом осуществляется только вручную оператором. При необходимости система автоматического управления включается и при соответствующем сочетании сигналов,т.е. когда все датчики дают сигнал низкого уровня, происходит заглубление рабочего органа - на электромагнит 1 подается питание. Подъем рабочего органа будет происходить до тех пор, пока сигнал хотя бы одного датчика из четырех изменится на противоположный. Заглубление при этом прекратится, так как прекратится подача напряжения на электромагнит 1. При копании грунта изменяются показания датчиков, и в случае появления сочетания, отмеченного в графе 2 на таблице единицей, начинается выглубление рабочего органа, которое будет происходить до тех пор, пока не изменятся показания хотя бы одного датчика на противоположное в формуле, определяющей функционирование электромагнита 2. Золотник распределителя 2 займет нейтральное положение, и процесс выглубления прекратится. После окончания процесса наполнения рабочего органа оператор не выключает систему питания системы и переходит на ручное управление. В результате система автоматики первоначально обеспечит максимальное заглубление рабочего органа, а затем постепенное его выглубление, приближенное к оптимальному треугольному закону. При этом приоритет в управлении отдается оператору, так как он визуально наблюдает за рабочим процессом и в случае необходимости может скорректировать положение рабочего органа. Повышение производительности происходит за счет того, что система автоматики отслеживает одновременно за четырьмя переменными факторами и при их соответствующем сочетании выдает сигнал на управление рабочим органом. Оператор не может объективно оценить все входные сигналы и принять решение о выглублении или заглуб 3 10577 1 2008.04.30 лении рабочего органа. Обычно это решение принимается с задержкой по времени, что ведет к потере времени, а значит и производительности машины. Таблица истинности функционирования системы автоматизации процесса копания грунта землеройной машиной Входной сигнал от датчиков Подаваемый сигнал Загрузка Усилие на ра- Гидросистема на электромагниты Буксование ДВС бочем органе под нагрузкой А В С Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: E02F 9/22
Метки: автоматизированного, рабочим, землеройной, грунта, система, органом, управления, машины, копании
Код ссылки
<a href="https://by.patents.su/4-10577-sistema-avtomatizirovannogo-upravleniya-rabochim-organom-zemlerojjnojj-mashiny-pri-kopanii-grunta.html" rel="bookmark" title="База патентов Беларуси">Система автоматизированного управления рабочим органом землеройной машины при копании грунта</a>
Устройство управления сельскохозяйственной машиной со штанговым рабочим органом для внесения удобрения, ядохимикатов и других веществ
Номер патента: 1829
Опубликовано: 30.12.1997
Авторы: Дональд Мк Грас, Рагунович Сергей Петрович, Сидоренко Юрий Александрович
МПК: A01M 7/00
Метки: ядохимикатов, веществ, устройство, органом, других, сельскохозяйственной, управления, рабочим, внесения, удобрения, штанговым, машиной
Текст:
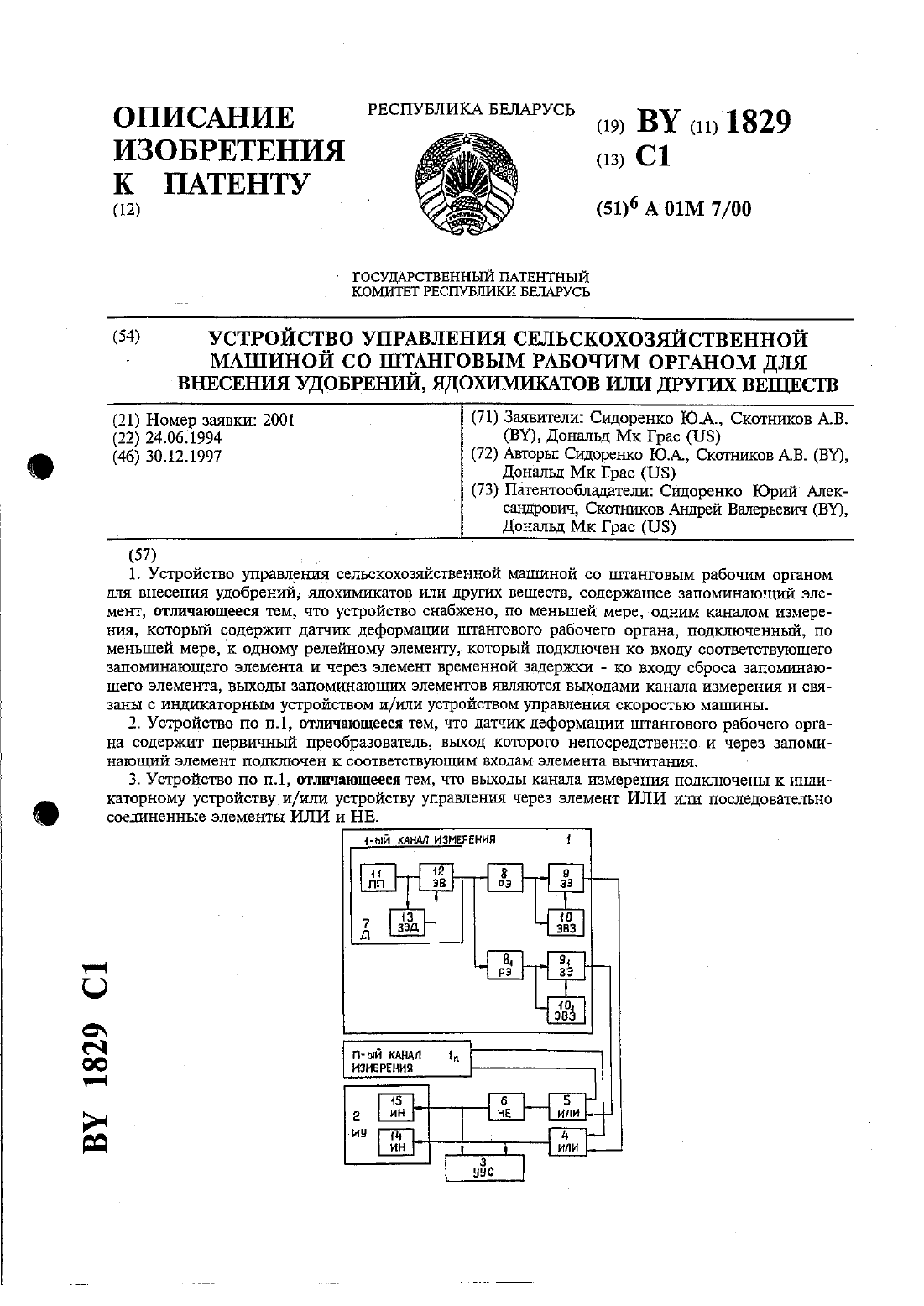
...и запоминающий элемент датчика необходимо использовать тогда, когда нулевой уровень сигнала первичного преобразователя датчика может изменяться в процессе эксплуатации. Изменение нулевого уровня сигнала мйкет быть обусловлено остаточными деформациями, вознршаюцгиьш в процессе эксплуатации, изменснием высоты установки штанг в соответствии с требованиями технологического процесса. тКоличество релейных элементов зависит от того, сколько...
Вертикальный роторный механизм с самобалансирующимся рабочим органом
Номер патента: 7706
Опубликовано: 28.02.2006
Авторы: Бородавко Владимир Иванович, Воробьев Владимир Васильевич, Костевич Юрий Владимирович, Козин Александр Юрьевич, Бороха Эдуард Леонидович, Артамонов Владимир Александрович, Лускин Григорий Михайлович
МПК: F16F 15/32, B04B 9/14
Метки: вертикальный, самобалансирующимся, органом, механизм, рабочим, роторный
Текст:
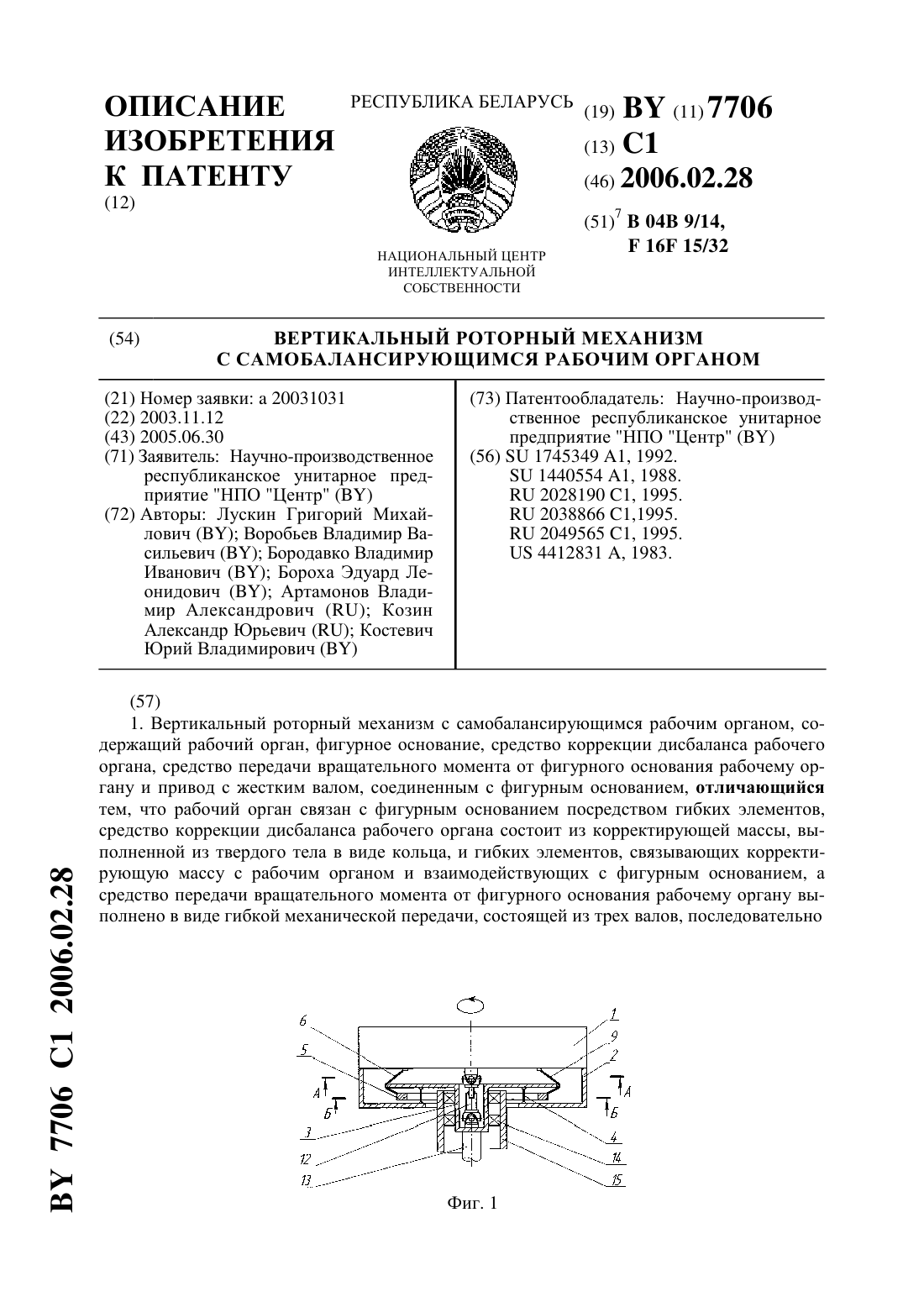
...Более того, очевидно, что при возникновении дисбаланса корректирующая масса будет перемещаться в ту же сторону, что и рабочий орган, т.к. он жестко соединен с упругой обечайкой. Кроме этого, передача вращательного момента рабочему органу посредством упругих элементов является малоэффективной. Задача изобретения состоит в повышении эффективности самобалансировки рабочего органа за счет достижения технического эффекта, заключающегося в...
Машина Голубева В. И. с качающимся рабочим органом
Номер патента: 49
Опубликовано: 30.05.1994
Автор: Голубев Владимир Иосифович
МПК: F01C 9/00
Метки: голубева, рабочим, органом, качающимся, машина
Текст:
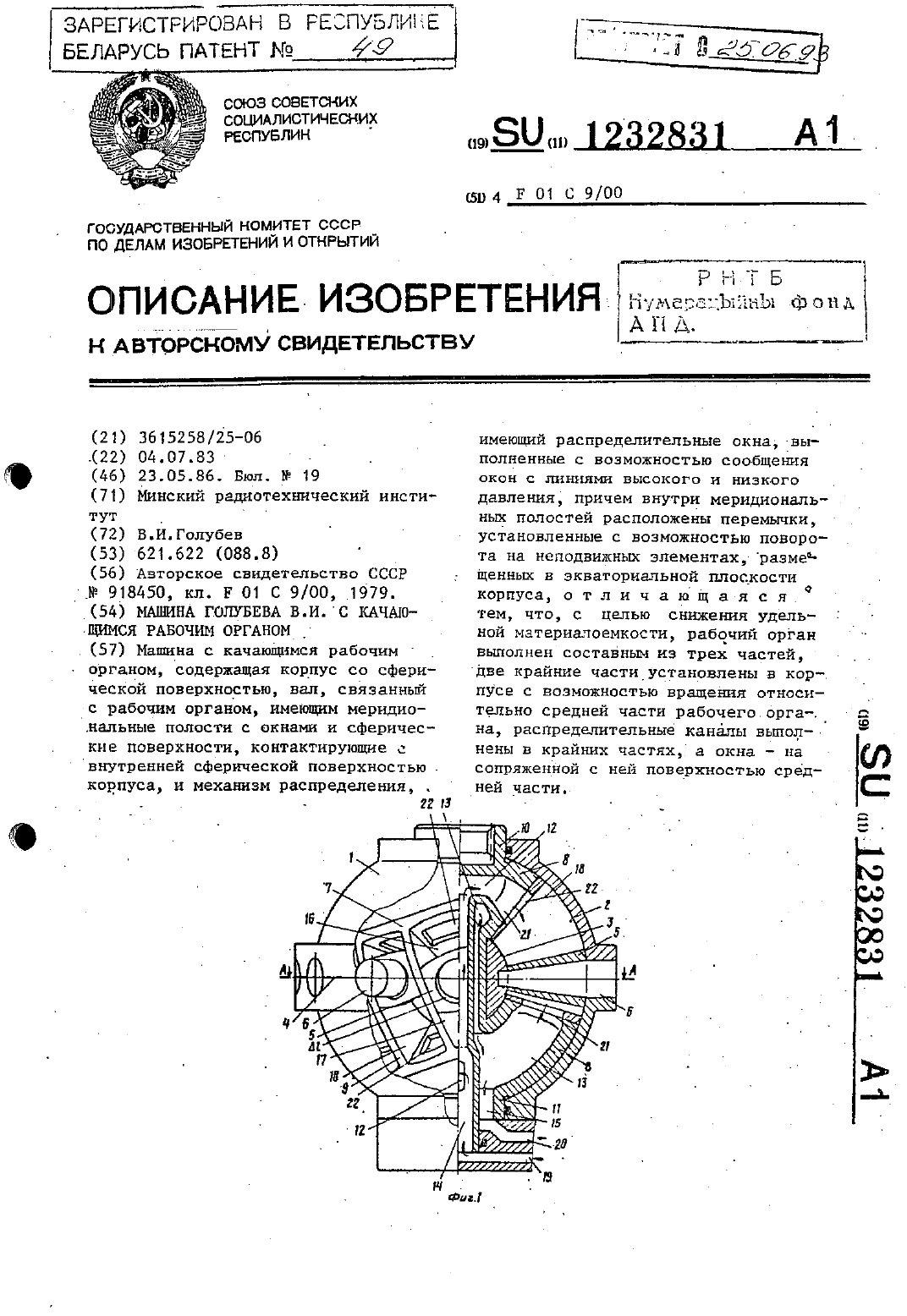
...ЭЛЕМЕНТЕХ 6, выопненны в виде осей, закрепленны в корпусе. Машина содержит также рабочий орган 7, вьшолненны составным из трех частей, причем двецелое или жестко скреплены одна с другой и установлены в корпусе 1 с возможностью вращения относительно средней части 9. Крайние части 8 имеютпапфы 10 и 11, с помощью коточ рык он установлены в корпусе.В крайШСС ЧЗСТЯХ В БЬШОЛНЕНЫ РЗСПРЭДЕПН тельные каналы 12-15 для подвода и отвода...
Машина Голубева В. И. с качающимся рабочим органом
Номер патента: 51
Опубликовано: 30.09.1994
Автор: Голубев Владимир Иосифович
МПК: F01C 9/00
Метки: голубева, органом, рабочим, машина, качающимся
Текст:
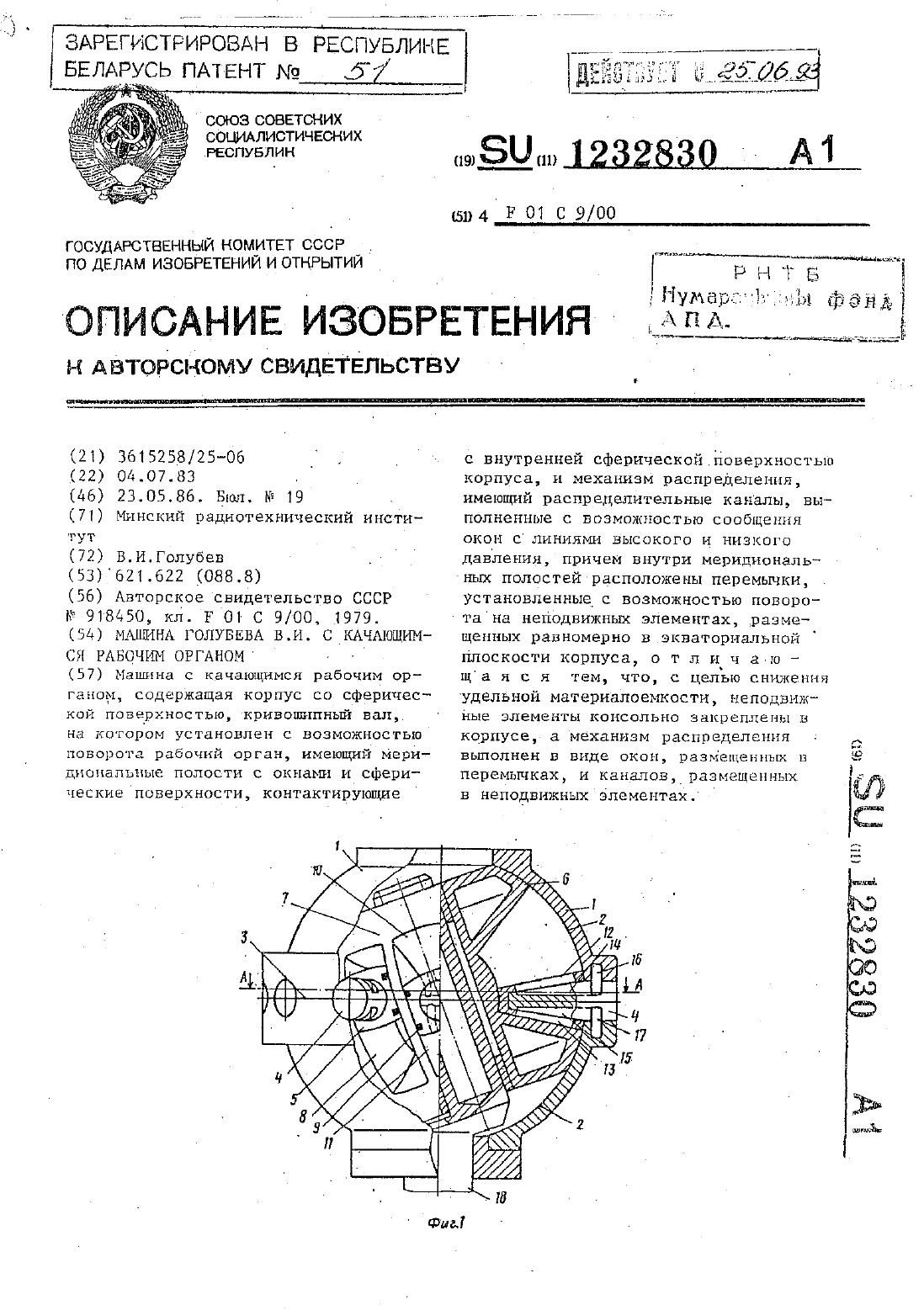
....На фиг. 1 изображена машина с качающимся рабочим органом на фиг.2 разрез АА на фиг. 1 на фиг 3 печ ремычка и неподвижный элемент, поперечньй разрез.МЗЦННЕ С КЗЧЗЮЪЦИЙСН рабочим органом содержит корпус 1 с внутренней сферической поверкноствю 2. По экватору 3 корпуса 1 нанеподвижных злее ментах 4, выполненным в виде консоль но закреппенны в корпусе-1 осей, ус тановлены с возможностью поворотапе ремычки 5 Машина содержит также ран бочий...
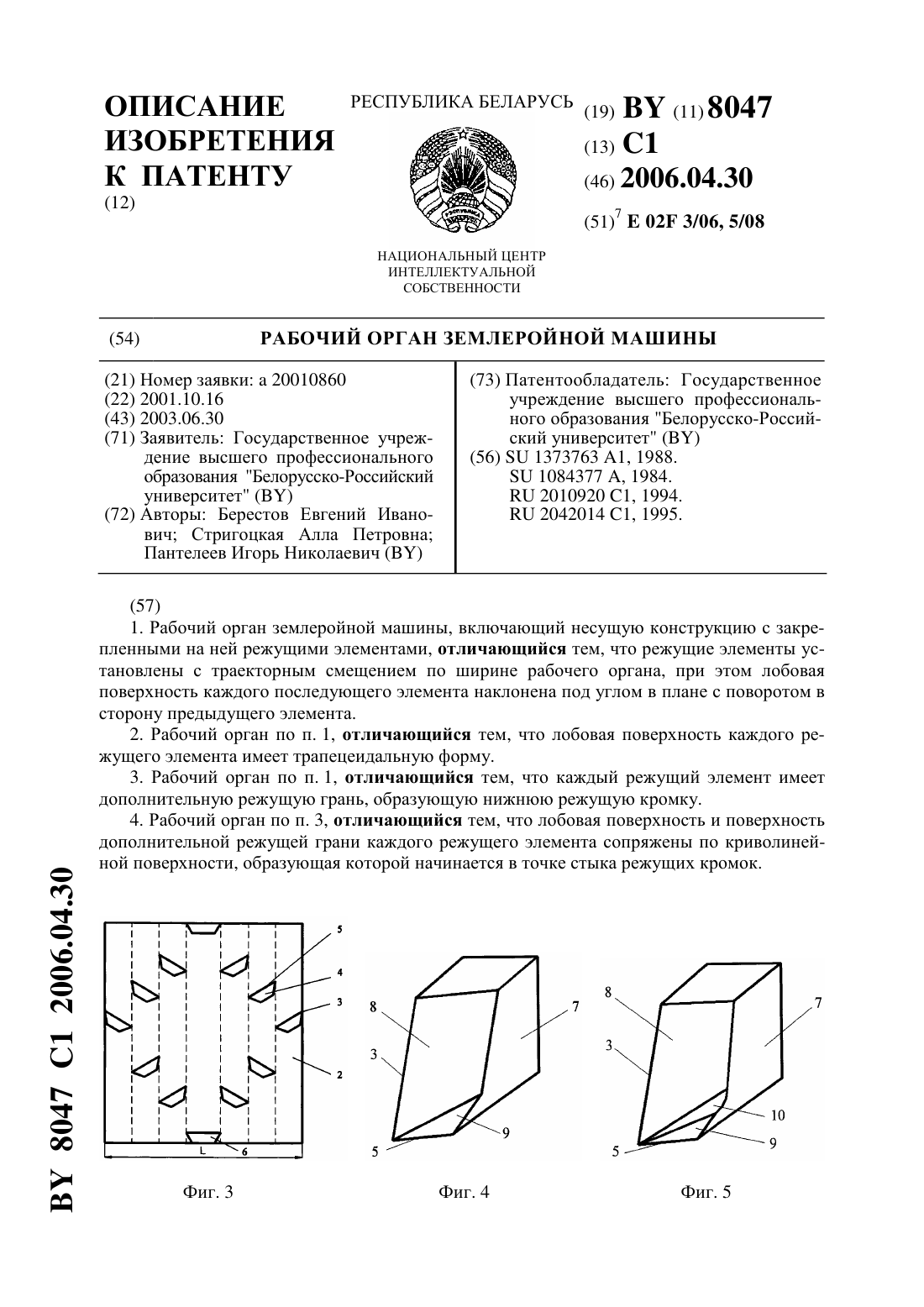
Рабочий орган землеройной машины
Номер патента: 8047
Опубликовано: 30.04.2006
Авторы: Берестов Евгений Иванович, Пантелеев Игорь Николаевич, Стригоцкая Алла Петровна
Метки: рабочий, машины, орган, землеройной
Текст:
...элементы 4 устанавливаются с траекторным смещением по ширинерабочего органа. Режущий элемент 7 может иметь и две режущие грани 8 и 9. При этом грань 8 может устанавливаться как перпендикулярно несущей конструкции 2, так и под углом к ней. Аналогично может устанавливаться грань 9 по отношению к грани 8. Возможна также установка граней 8 и 9 под любым углом резания независимо друг от друга. 2 8047 1 2006.04.30 Грани 8 и 9 могут...
Предыдущий патент: Планарный электростатический микрокоммутатор
Следующий патент: Система автоматизации рабочего процесса бульдозера
Случайный патент: Способ и устройство для рассева сыпучего материала по поверхности поля