Шаговый двигатель
Номер патента: U 9728
Опубликовано: 30.12.2013
Авторы: Титко Елена Александровна, Карпович Святослав Евгеньевич, Дайняк Игорь Викторович, Кекиш Николай Иванович, Поляковский Виталий Викторович, Жарский Владимир Владимирович, Литвинов Егор Алексеевич, Титко Дмитрий Сергеевич, Бегун Дмитрий Геннадьевич
Текст
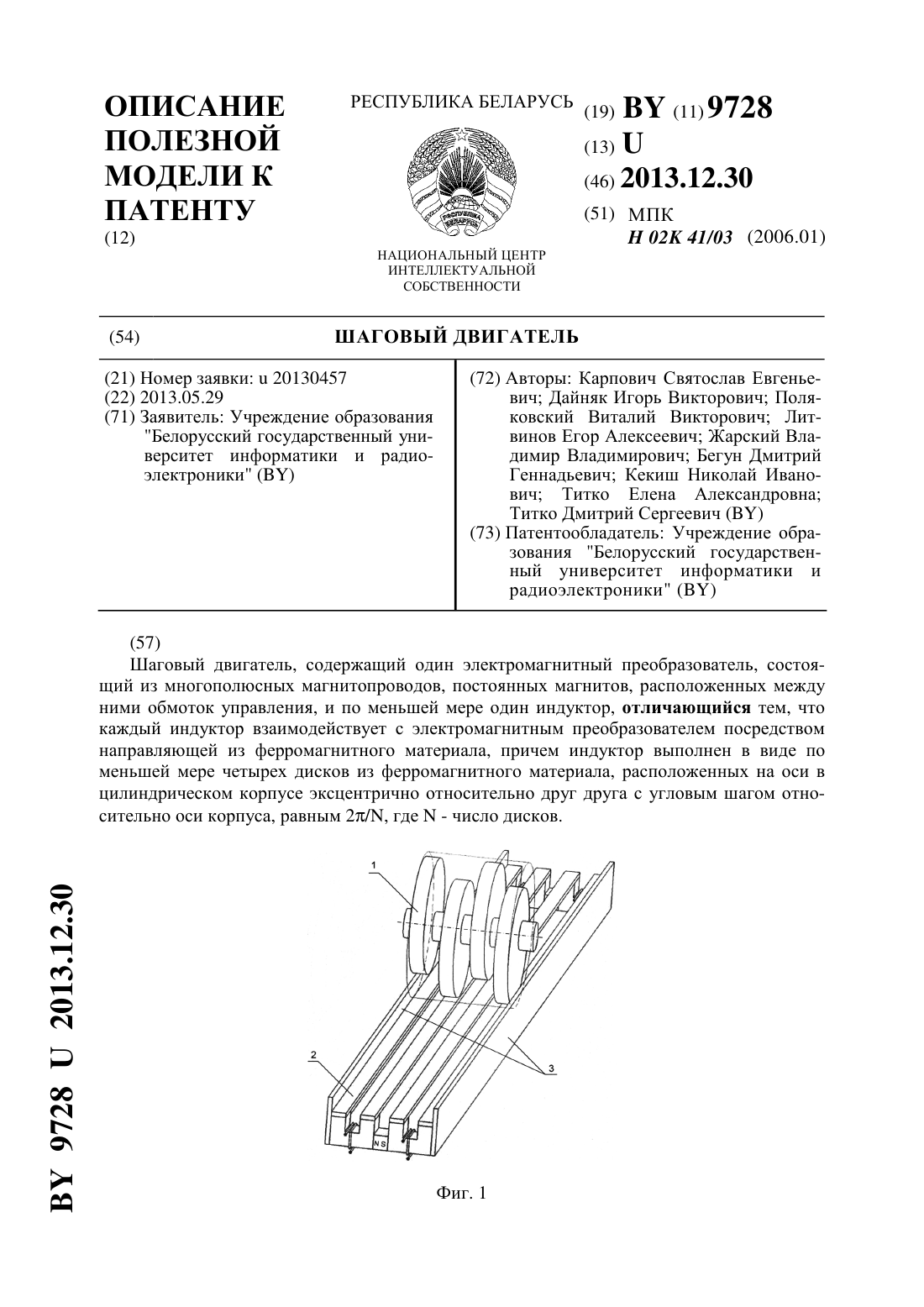
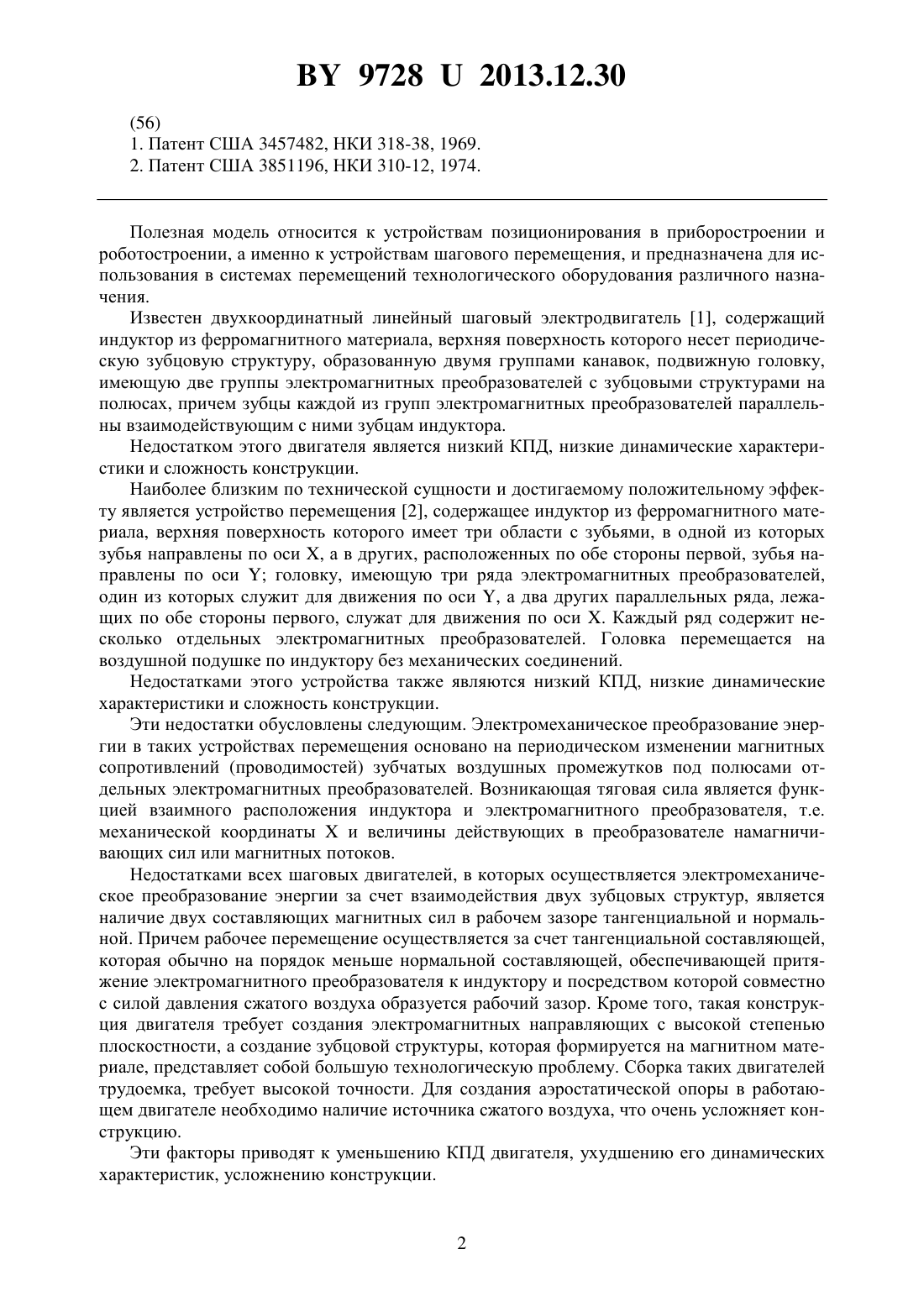
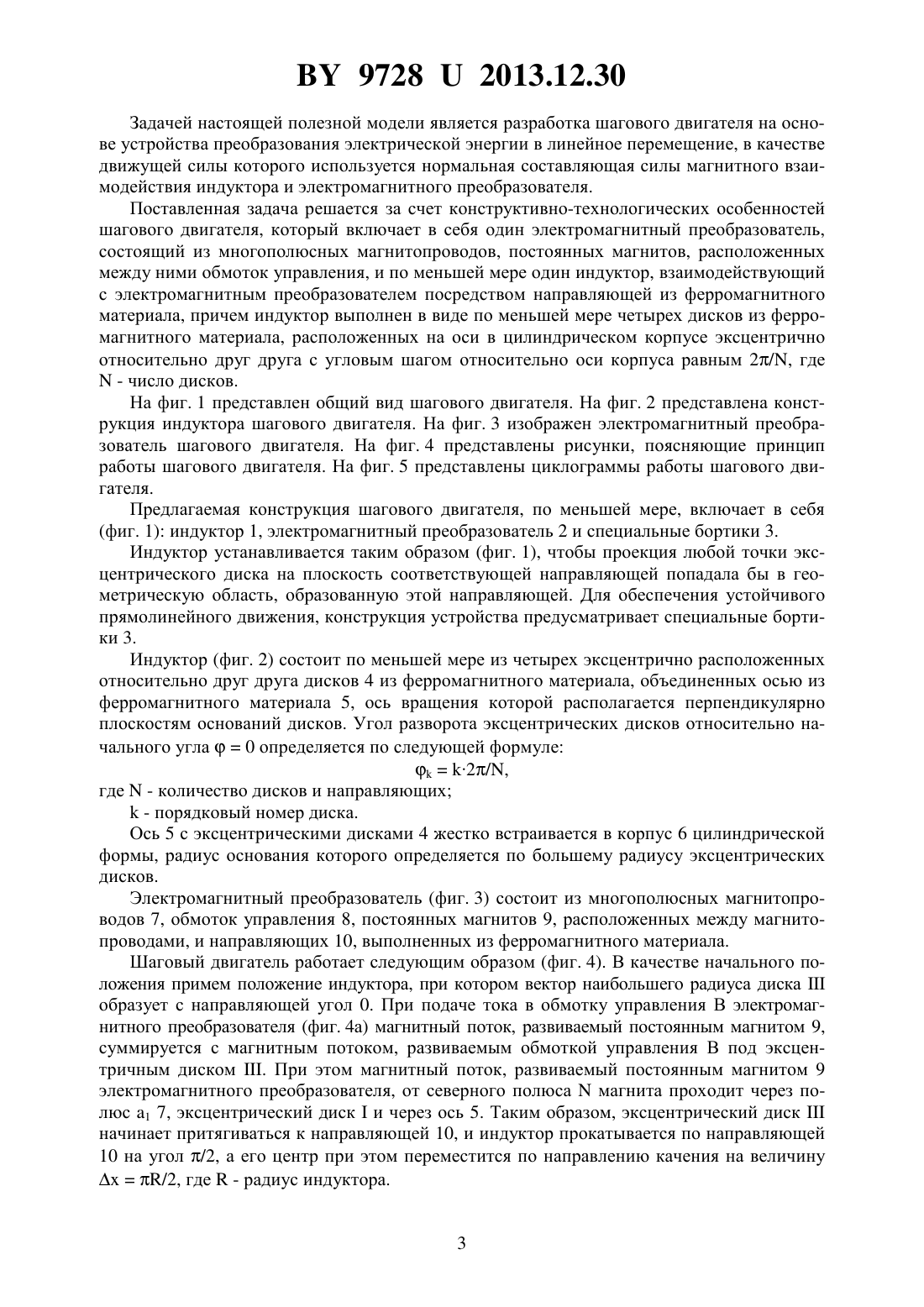
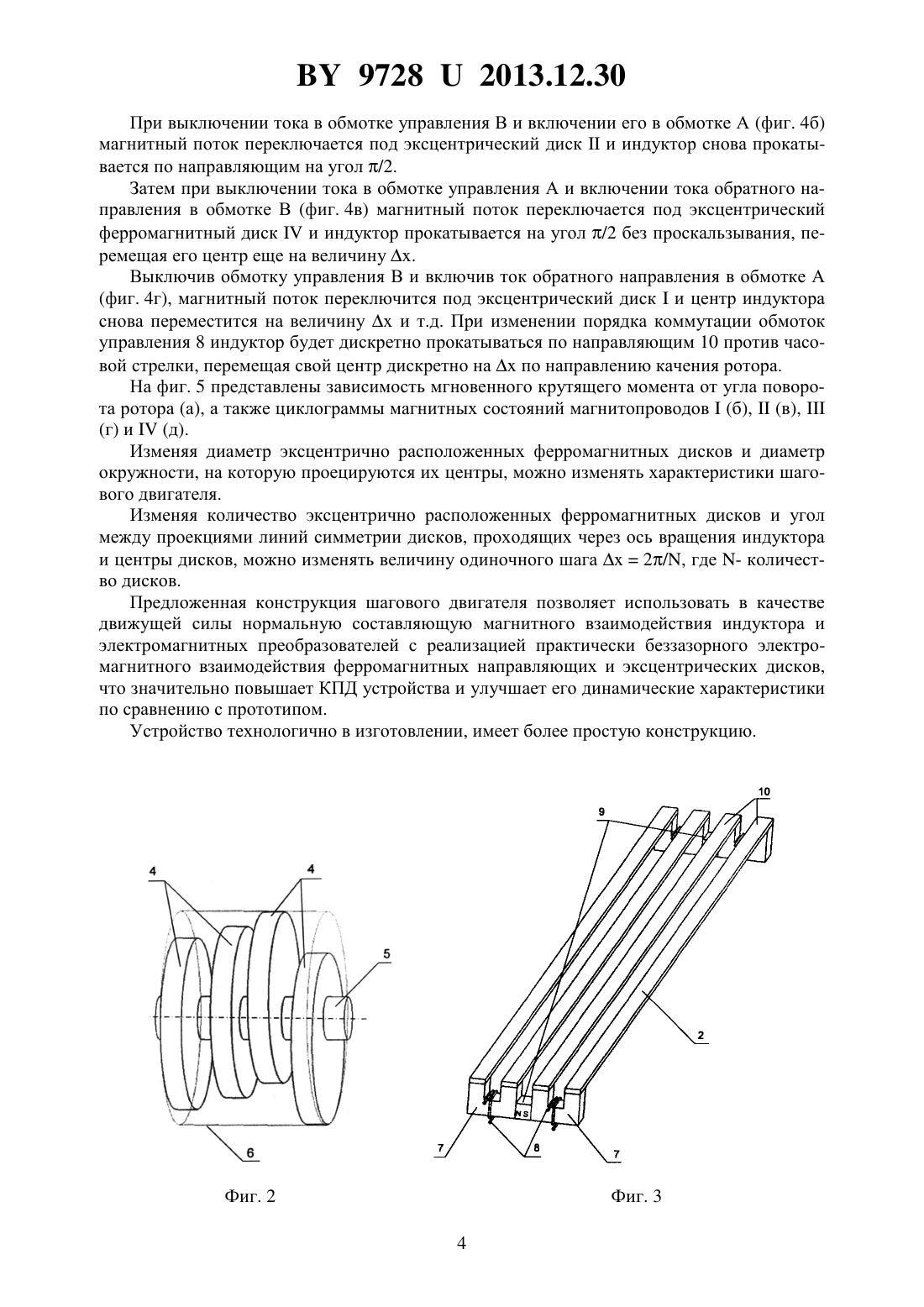
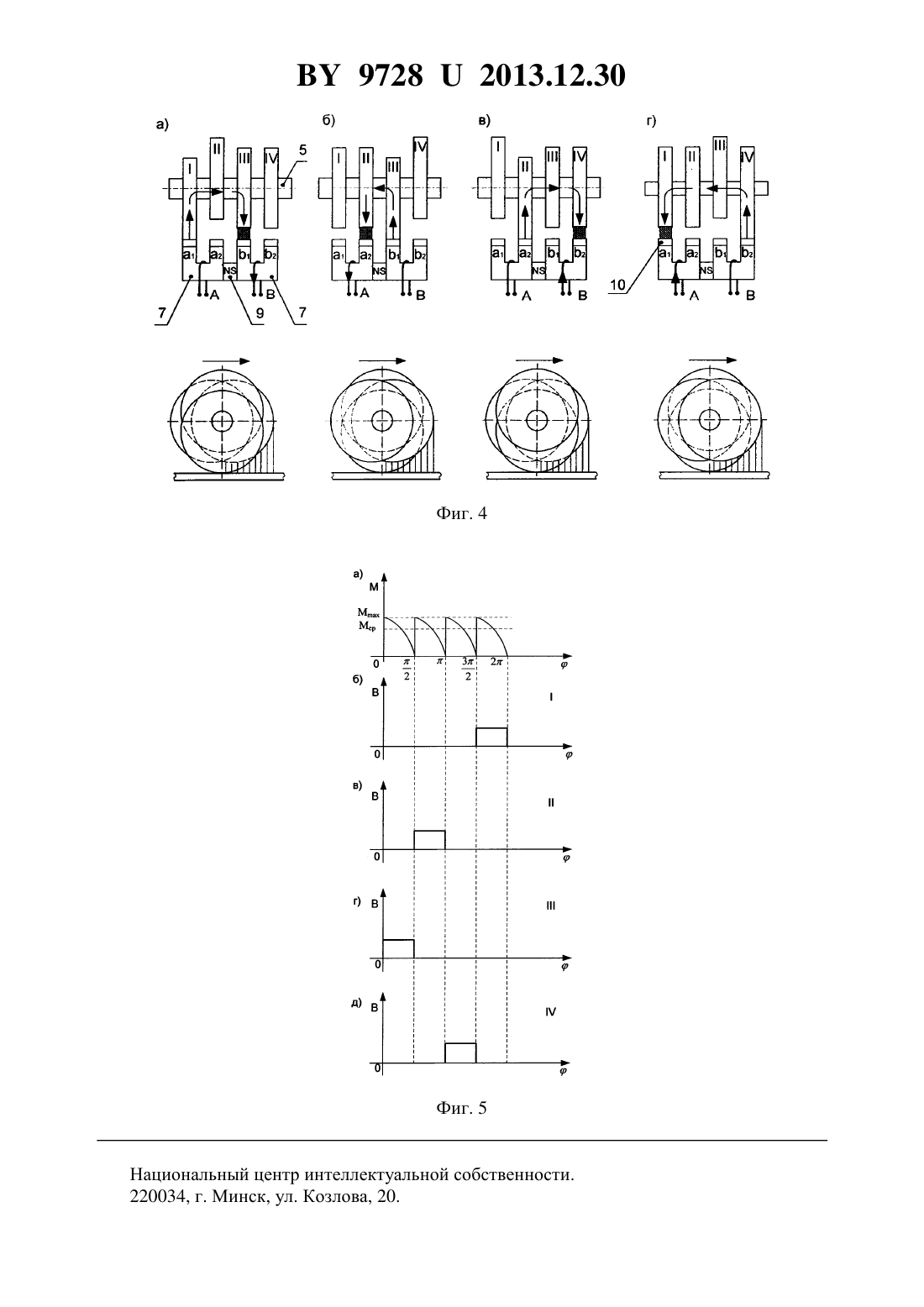
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Белорусский государственный университет информатики и радиоэлектроники(72) Авторы Карпович Святослав Евгеньевич Дайняк Игорь Викторович Поляковский Виталий Викторович Литвинов Егор Алексеевич Жарский Владимир Владимирович Бегун Дмитрий Геннадьевич Кекиш Николай Иванович Титко Елена Александровна Титко Дмитрий Сергеевич(73) Патентообладатель Учреждение образования Белорусский государственный университет информатики и радиоэлектроники(57) Шаговый двигатель, содержащий один электромагнитный преобразователь, состоящий из многополюсных магнитопроводов, постоянных магнитов, расположенных между ними обмоток управления, и по меньшей мере один индуктор, отличающийся тем, что каждый индуктор взаимодействует с электромагнитным преобразователем посредством направляющей из ферромагнитного материала, причем индуктор выполнен в виде по меньшей мере четырех дисков из ферромагнитного материала, расположенных на оси в цилиндрическом корпусе эксцентрично относительно друг друга с угловым шагом относительно оси корпуса, равным 2/, где- число дисков.(56) 1. Патент США 3457482, НКИ 318-38, 1969. 2. Патент США 3851196, НКИ 310-12, 1974. Полезная модель относится к устройствам позиционирования в приборостроении и роботостроении, а именно к устройствам шагового перемещения, и предназначена для использования в системах перемещений технологического оборудования различного назначения. Известен двухкоординатный линейный шаговый электродвигатель 1, содержащий индуктор из ферромагнитного материала, верхняя поверхность которого несет периодическую зубцовую структуру, образованную двумя группами канавок, подвижную головку,имеющую две группы электромагнитных преобразователей с зубцовыми структурами на полюсах, причем зубцы каждой из групп электромагнитных преобразователей параллельны взаимодействующим с ними зубцам индуктора. Недостатком этого двигателя является низкий КПД, низкие динамические характеристики и сложность конструкции. Наиболее близким по технической сущности и достигаемому положительному эффекту является устройство перемещения 2, содержащее индуктор из ферромагнитного материала, верхняя поверхность которого имеет три области с зубьями, в одной из которых зубья направлены по оси , а в других, расположенных по обе стороны первой, зубья направлены по осиголовку, имеющую три ряда электромагнитных преобразователей,один из которых служит для движения по оси , а два других параллельных ряда, лежащих по обе стороны первого, служат для движения по оси . Каждый ряд содержит несколько отдельных электромагнитных преобразователей. Головка перемещается на воздушной подушке по индуктору без механических соединений. Недостатками этого устройства также являются низкий КПД, низкие динамические характеристики и сложность конструкции. Эти недостатки обусловлены следующим. Электромеханическое преобразование энергии в таких устройствах перемещения основано на периодическом изменении магнитных сопротивлений (проводимостей) зубчатых воздушных промежутков под полюсами отдельных электромагнитных преобразователей. Возникающая тяговая сила является функцией взаимного расположения индуктора и электромагнитного преобразователя, т.е. механической координатыи величины действующих в преобразователе намагничивающих сил или магнитных потоков. Недостатками всех шаговых двигателей, в которых осуществляется электромеханическое преобразование энергии за счет взаимодействия двух зубцовых структур, является наличие двух составляющих магнитных сил в рабочем зазоре тангенциальной и нормальной. Причем рабочее перемещение осуществляется за счет тангенциальной составляющей,которая обычно на порядок меньше нормальной составляющей, обеспечивающей притяжение электромагнитного преобразователя к индуктору и посредством которой совместно с силой давления сжатого воздуха образуется рабочий зазор. Кроме того, такая конструкция двигателя требует создания электромагнитных направляющих с высокой степенью плоскостности, а создание зубцовой структуры, которая формируется на магнитном материале, представляет собой большую технологическую проблему. Сборка таких двигателей трудоемка, требует высокой точности. Для создания аэростатической опоры в работающем двигателе необходимо наличие источника сжатого воздуха, что очень усложняет конструкцию. Эти факторы приводят к уменьшению КПД двигателя, ухудшению его динамических характеристик, усложнению конструкции. 97282013.12.30 Задачей настоящей полезной модели является разработка шагового двигателя на основе устройства преобразования электрической энергии в линейное перемещение, в качестве движущей силы которого используется нормальная составляющая силы магнитного взаимодействия индуктора и электромагнитного преобразователя. Поставленная задача решается за счет конструктивно-технологических особенностей шагового двигателя, который включает в себя один электромагнитный преобразователь,состоящий из многополюсных магнитопроводов, постоянных магнитов, расположенных между ними обмоток управления, и по меньшей мере один индуктор, взаимодействующий с электромагнитным преобразователем посредством направляющей из ферромагнитного материала, причем индуктор выполнен в виде по меньшей мере четырех дисков из ферромагнитного материала, расположенных на оси в цилиндрическом корпусе эксцентрично относительно друг друга с угловым шагом относительно оси корпуса равным 2/, где- число дисков. На фиг. 1 представлен общий вид шагового двигателя. На фиг. 2 представлена конструкция индуктора шагового двигателя. На фиг.3 изображен электромагнитный преобразователь шагового двигателя. На фиг. 4 представлены рисунки, поясняющие принцип работы шагового двигателя. На фиг. 5 представлены циклограммы работы шагового двигателя. Предлагаемая конструкция шагового двигателя, по меньшей мере, включает в себя(фиг. 1) индуктор 1, электромагнитный преобразователь 2 и специальные бортики 3. Индуктор устанавливается таким образом (фиг. 1), чтобы проекция любой точки эксцентрического диска на плоскость соответствующей направляющей попадала бы в геометрическую область, образованную этой направляющей. Для обеспечения устойчивого прямолинейного движения, конструкция устройства предусматривает специальные бортики 3. Индуктор (фиг. 2) состоит по меньшей мере из четырех эксцентрично расположенных относительно друг друга дисков 4 из ферромагнитного материала, объединенных осью из ферромагнитного материала 5, ось вращения которой располагается перпендикулярно плоскостям оснований дисков. Угол разворота эксцентрических дисков относительно начального угла 0 определяется по следующей формуле 2/,где- количество дисков и направляющих- порядковый номер диска. Ось 5 с эксцентрическими дисками 4 жестко встраивается в корпус 6 цилиндрической формы, радиус основания которого определяется по большему радиусу эксцентрических дисков. Электромагнитный преобразователь (фиг. 3) состоит из многополюсных магнитопроводов 7, обмоток управления 8, постоянных магнитов 9, расположенных между магнитопроводами, и направляющих 10, выполненных из ферромагнитного материала. Шаговый двигатель работает следующим образом (фиг. 4). В качестве начального положения примем положение индуктора, при котором вектор наибольшего радиуса дискаобразует с направляющей угол 0. При подаче тока в обмотку управления В электромагнитного преобразователя (фиг. 4 а) магнитный поток, развиваемый постоянным магнитом 9,суммируется с магнитным потоком, развиваемым обмоткой управления В под эксцентричным диском . При этом магнитный поток, развиваемый постоянным магнитом 9 электромагнитного преобразователя, от северного полюсамагнита проходит через полюс 1 7, эксцентрический диски через ось 5. Таким образом, эксцентрический дискначинает притягиваться к направляющей 10, и индуктор прокатывается по направляющей 10 на угол /2, а его центр при этом переместится по направлению качения на величину/2, где- радиус индуктора. 3 97282013.12.30 При выключении тока в обмотке управления В и включении его в обмотке А (фиг. 4 б) магнитный поток переключается под эксцентрический диски индуктор снова прокатывается по направляющим на угол /2. Затем при выключении тока в обмотке управления А и включении тока обратного направления в обмотке В (фиг. 4 в) магнитный поток переключается под эксцентрический ферромагнитный диски индуктор прокатывается на угол /2 без проскальзывания, перемещая его центр еще на величину . Выключив обмотку управления В и включив ток обратного направления в обмотке А(фиг. 4 г), магнитный поток переключится под эксцентрический диски центр индуктора снова переместится на величинуи т.д. При изменении порядка коммутации обмоток управления 8 индуктор будет дискретно прокатываться по направляющим 10 против часовой стрелки, перемещая свой центр дискретно напо направлению качения ротора. На фиг. 5 представлены зависимость мгновенного крутящего момента от угла поворота ротора (а), а также циклограммы магнитных состояний магнитопроводов(б),(в),(г) и(д). Изменяя диаметр эксцентрично расположенных ферромагнитных дисков и диаметр окружности, на которую проецируются их центры, можно изменять характеристики шагового двигателя. Изменяя количество эксцентрично расположенных ферромагнитных дисков и угол между проекциями линий симметрии дисков, проходящих через ось вращения индуктора и центры дисков, можно изменять величину одиночного шага 2/, где - количество дисков. Предложенная конструкция шагового двигателя позволяет использовать в качестве движущей силы нормальную составляющую магнитного взаимодействия индуктора и электромагнитных преобразователей с реализацией практически беззазорного электромагнитного взаимодействия ферромагнитных направляющих и эксцентрических дисков,что значительно повышает КПД устройства и улучшает его динамические характеристики по сравнению с прототипом. Устройство технологично в изготовлении, имеет более простую конструкцию. Фиг. 5 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: H02K 41/03
Код ссылки
<a href="https://by.patents.su/5-u9728-shagovyjj-dvigatel.html" rel="bookmark" title="База патентов Беларуси">Шаговый двигатель</a>
Двухкоординатный линейный шаговый двигатель с совмещенными координатами
Номер патента: 4657
Опубликовано: 30.09.2002
Авторы: Лозовский Валерий Иванович, Трусов Николай Калистратович, Жарский Владимир Владимирович, Булацкий Геннадий Николаевич
МПК: H02K 41/03, H02K 41/02
Метки: линейный, совмещенными, двигатель, координатами, шаговый, двухкоординатный
Текст:
...ширине его стержня, у двухфазного модуля (фиг. 6 а) расход меди примерно в два раза больше чем у однофазного (фиг. 6 в). Расположение обмотки 7 в окне и на спинке магнитопровода приводит к увеличению высоты 2-фазного модуля по сравнению с однофазным. Следовательно, при одинаковой амплитуде тягового усилия индуктор ЛШД на двухфазных модулях будет иметь большую массу, большие габариты, чем на однофазных. Омическое сопротивление фазы...
Поворотный шаговый двигатель
Номер патента: 13845
Опубликовано: 30.12.2010
Авторы: Хомутов Эдуард Фёдорович, Хомутов Виталий Эдуардович
МПК: H02K 41/03
Метки: поворотный, шаговый, двигатель
Текст:
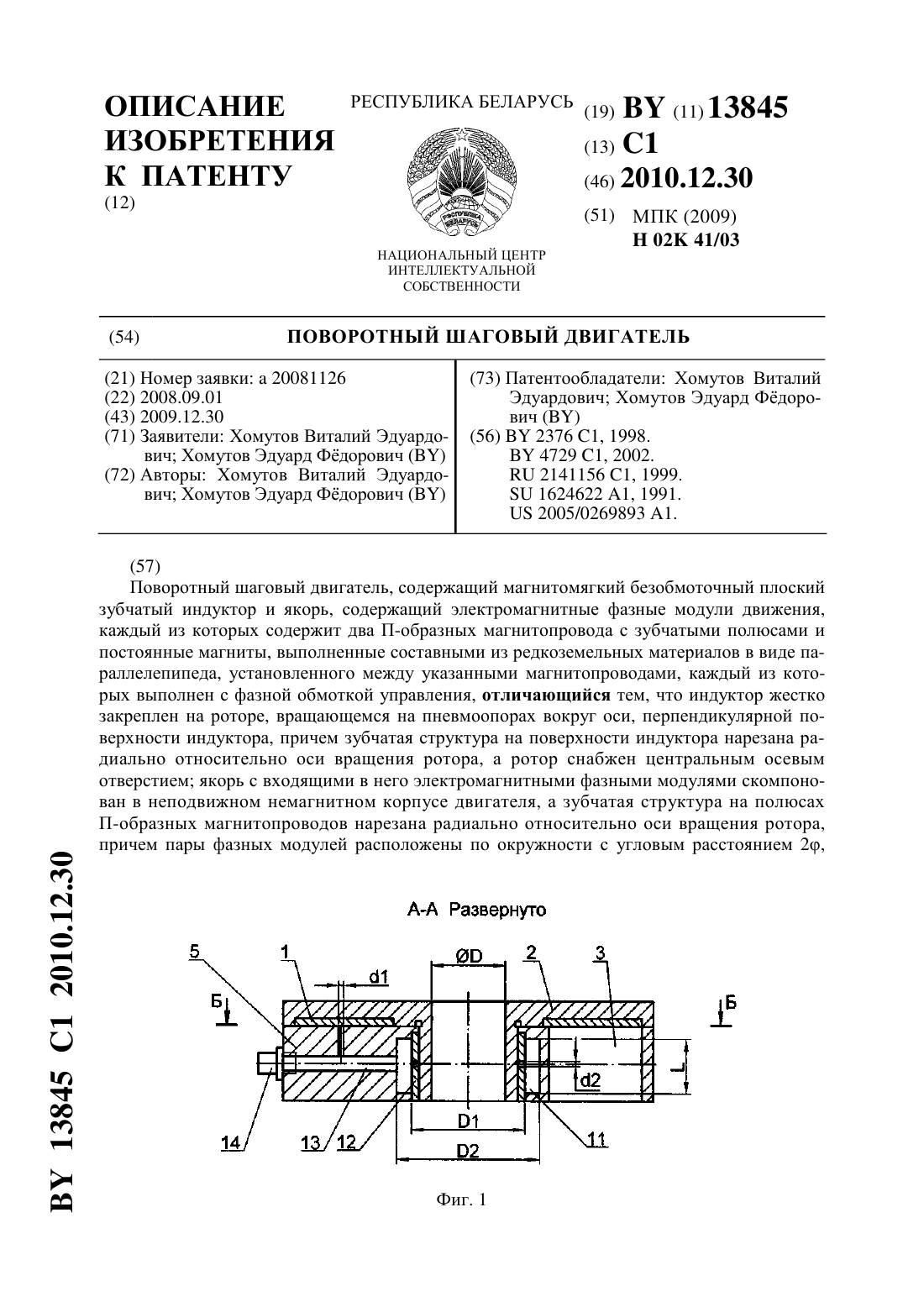
...9 из редкоземельных материалов, а между П-образными магнитопроводами 6 и постоянными магнитами 9 выполнено клеевое соединение 10 толщиной (0,050,3) мм, посредством электропроводящего клея, представляющего собой клеевую электропроводящую композицию на основе эпоксидных олигомеров и порошка из магнитомягкого материала типа пермаллоя, которое обладает высокой магнитной проводимостью и обеспечивает прочность склейки до 20 МПа. Корпус 5...
Линейный шаговый магнитоэлектрический двигатель
Номер патента: 2956
Опубликовано: 30.09.1999
Авторы: Жарский Владимир Владимирович, Трусов Алексей Николаевич, Сидорук Сергей Николаевич, Трусов Николай Калистратович
МПК: H02K 41/03
Метки: шаговый, двигатель, линейный, магнитоэлектрический
Текст:
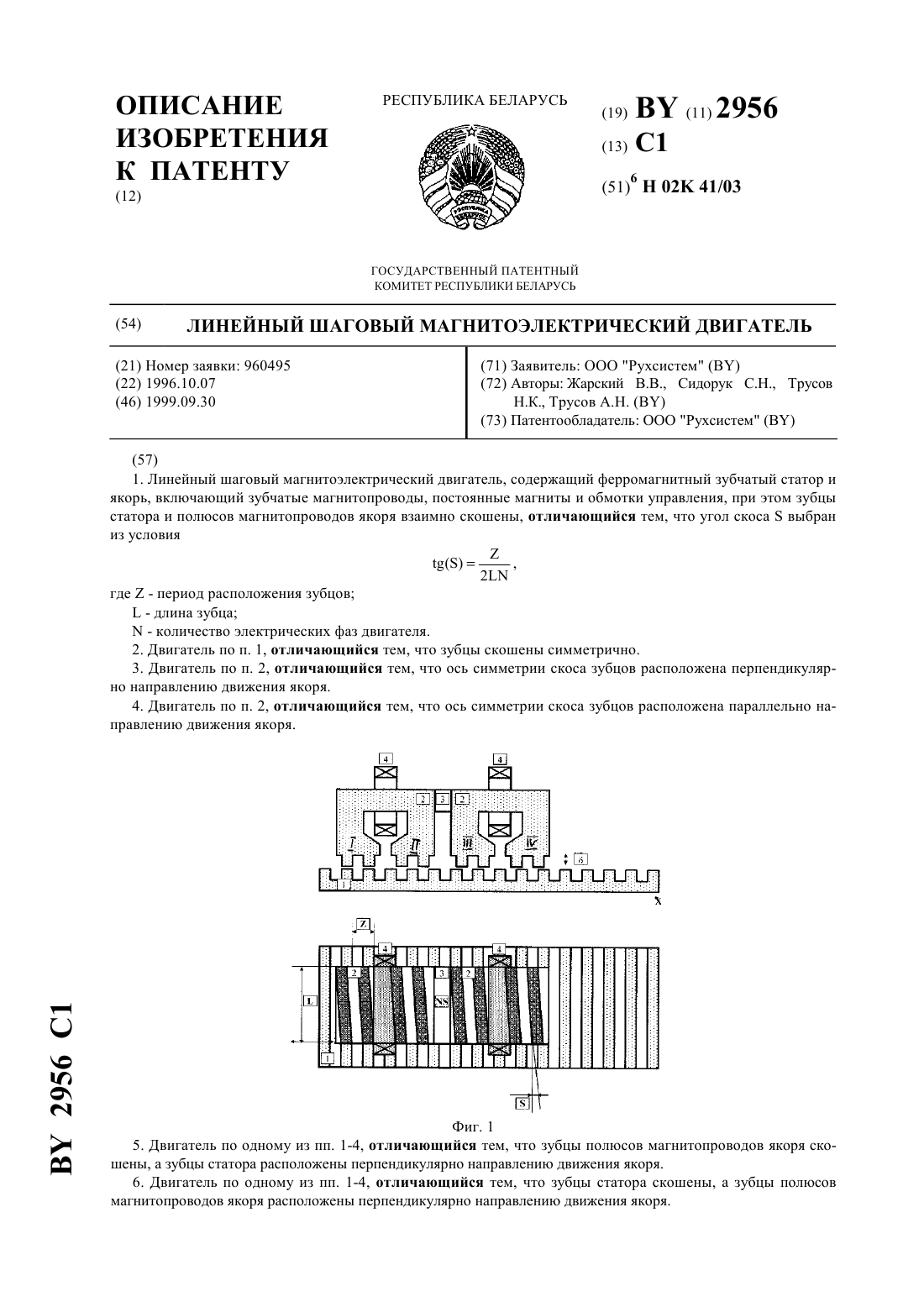
...ось симметрии скоса зубцов которого расположена перпендикулярно направлению движения на фиг. 5 - изображен якорь, ось симметрии скоса зубцов которого расположена параллельно направлению движения. Линейный шаговый магнитоэлектрический двигатель содержит ферромагнитный зубчатый статор 1 и якорь, состоящий из магнитопровода 2, постоянного магнита 3 и обмоток управления 4, на полюсах магнитопровода 2 якоря, как и на статоре 1, расположены...
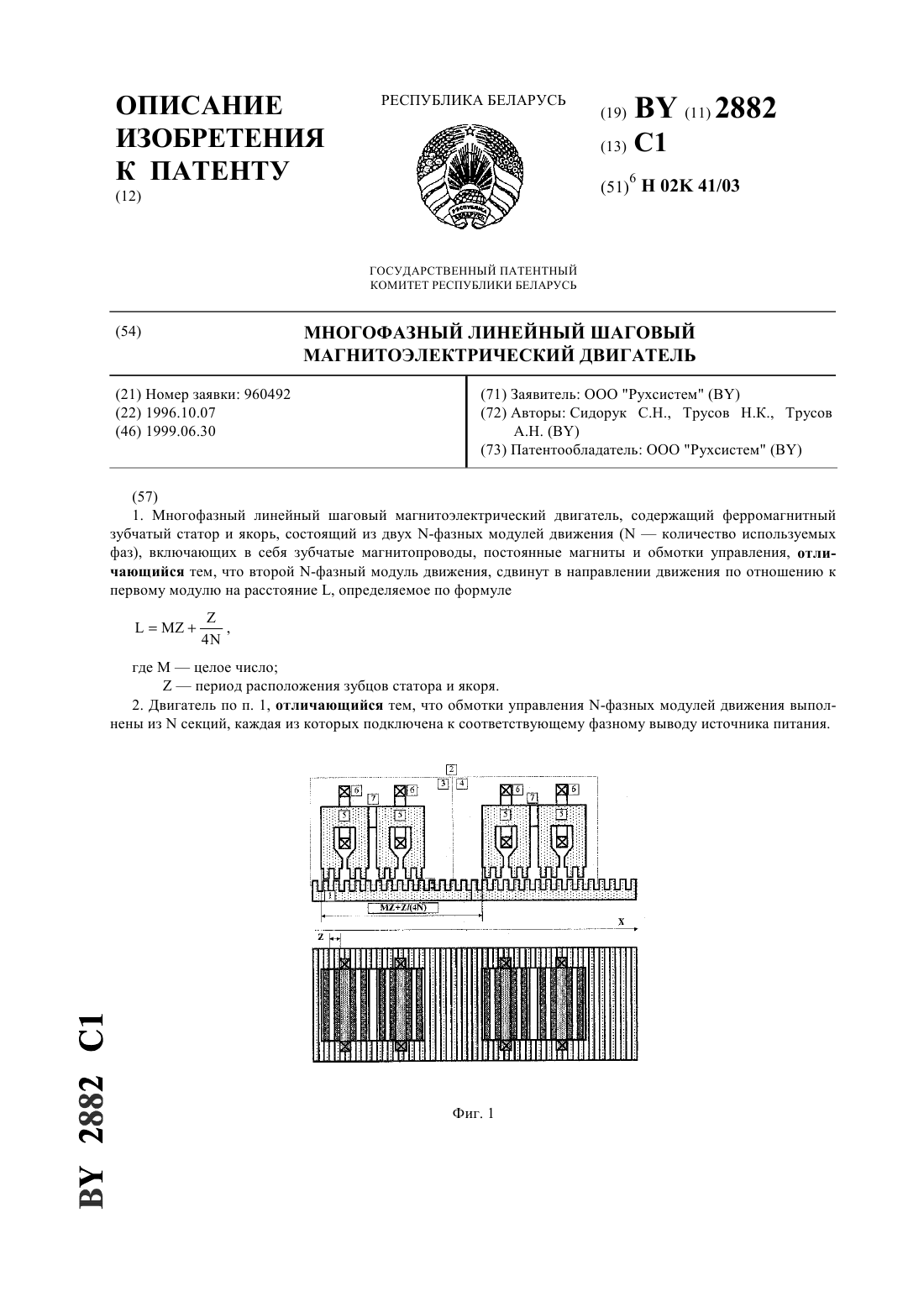
Многофазный линейный шаговый магнитоэлектрический двигатель
Номер патента: 2882
Опубликовано: 30.06.1999
Авторы: Трусов Николай Калистратович, Трусов Алексей Николаевич, Сидорук Сергей Николаевич
МПК: H02K 41/03
Метки: линейный, шаговый, двигатель, магнитоэлектрический, многофазный
Текст:
...фазному выводу источника питания, причем количество витков 1 в основной и 2- в дополнительных секциях каждого из модулей выбраны из соотношений На фиг. 1 показана принципиальная схема якоря многофазного линейного шаговою магнитоэлектрического двигателя, на фиг. 2, в качестве примера, векторные диаграммы м.д.с. фазных обмоток для двухфазного и на фиг. 3 для трехфазного двигателей, на фиг. 4 приведена схема соединения секций...
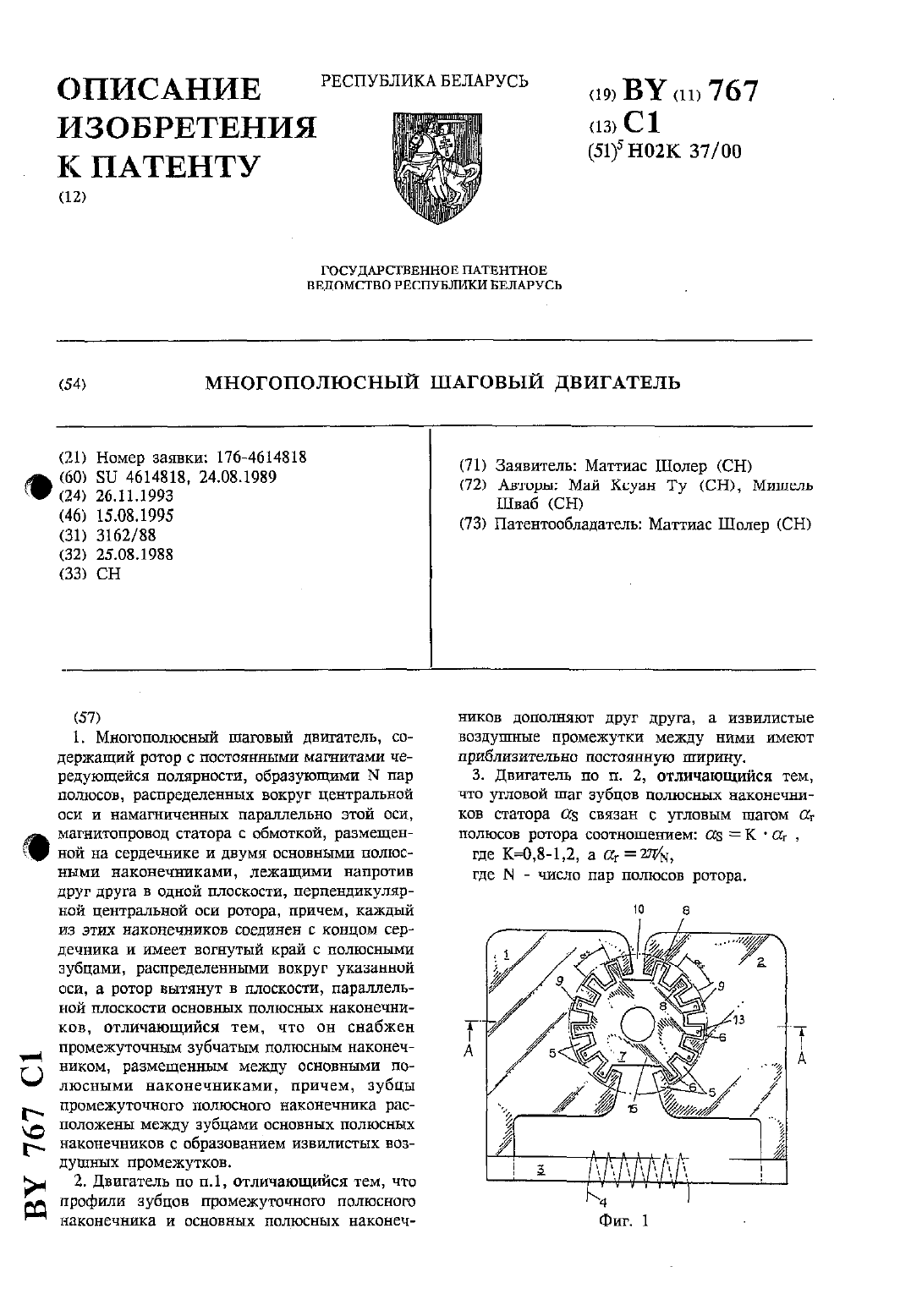
Многополюсный шаговый двигатель
Номер патента: 767
Опубликовано: 15.08.1995
Авторы: Май Ксуан Ту, Мишель Шваб
МПК: H02K 37/00
Метки: двигатель, многополюсный, шаговый
Текст:
...кромку вогиут го вида, вырубленную с профилем, который имеет определенное число люсных зубцов 5. В случае, изображенном На фиг. 1, полюсные зубцЕ имеют трапециевидную форму и разделены промежуточными зонами 6, кр ки которых представляют собой сегменты дуги, сцентрированные на ос перпендикулярной и плоскости полюсных наконечиков 1 и 2.В описанном здесь варианте выполнения полюсные зубцы каждого обоих наконечников 1 и 2. образуют группу из семи...
Предыдущий патент: Устройство для ухода за полостью рта
Следующий патент: Твердотельный лазерный усилитель с отражателем излучения накачки
Случайный патент: Устройство регистрации голограмм двоичных данных