Устройство управления электроприводами экскаватора
Номер патента: U 8908
Опубликовано: 28.02.2013
Текст
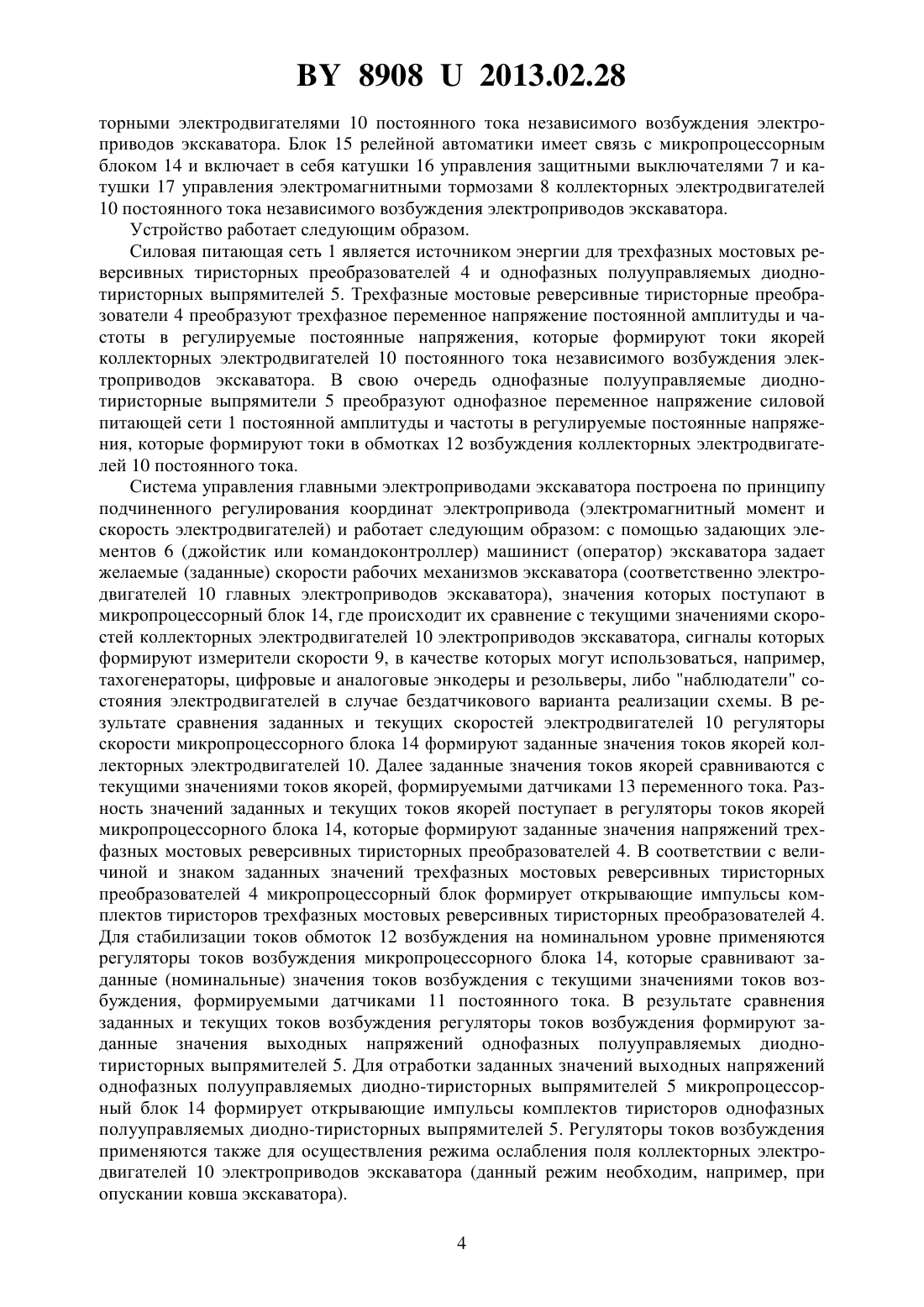
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА(71) Заявитель Закрытое акционерное общество Белналадка(72) Авторы Амелько Игорь Александрович Климко Иван Юрьевич(73) Патентообладатель Закрытое акционерное общество Белналадка(57) Устройство управления электроприводами экскаватора, содержащее силовую часть и блок управления системой электроприводов экскаватора, в котором силовая часть включает силовую питающую сеть 1, по меньшей мере три трехфазных мостовых реверсивных тиристорных преобразователя 4 с раздельным управлением комплектов тиристоров, которые снабжены блоками 3 защиты от опрокидывания инвертора, однофазными диоднотиристорными выпрямителями 5 блок управления системой электроприводов экскаватора содержит интерфейс 2, микропроцессор 14, задающие элементы 6 устройство также снабжено датчиками 13 переменного и датчиками 11 постоянного тока и измерителями 9 скорости коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора причем силовая питающая сеть 1 соединена с трехфазными мостовыми реверсивными тиристорными преобразователями 4 и с однофазными диодно-тиристорными выпрямителями 5 трехфазные мостовые реверсивные тиристорные преобразователи 4 соединены с коллекторными электродвигателями 10 постоянного тока независимого возбуждения электроприводов экскаватора, а однофазные диоднотиристорные выпрямители 5 подключены к обмоткам 12 возбуждения коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора задающие элементы 6 подключены к микропроцессору 14, который связан с интерфейсом 2, трехфазными мостовыми реверсивными тиристорными преобразователями 4, с датчиками 13 переменного и датчиками 11 постоянного тока, а также с измерителями 9 скорости коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора, отличающееся тем, что дополнительно снабжено защитными выключателями 7, через которые трехфазные мостовые реверсивные 89082013.02.28 тиристорные преобразователи 4 соединены с коллекторными электродвигателями 10 постоянного тока независимого возбуждения электроприводов экскаватора, а также снабжено блоком 15 релейной автоматики, который имеет связь с микропроцессорным блоком 14 и включает в себя катушки 16 управления защитными выключателями 7 и катушки 17 управления электромагнитными тормозами 8 коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора.(56) 1. Микитченко А.Я., Могучев М.В., Шевченко А.Н., Шоленков А.Н., Греков Э.Л. Разработки ОАО Рудоавтоматика в области перспективных систем экскаваторных приводов. УДК 622.271.4621.316.34 // Горное оборудование и электромеханика. - 2008. -6. С. 21-28. 2. Евразийская заявка 201100169/26 Устройство управления электроприводами экскаватора, дата подачи 28 ноября 2010 года. Полезная модель относится к управлению горнодобывающей техникой, а именно к управлению электроприводами механизмов одноковшовых карьерных экскаваторов, в частности главных электроприводов карьерного гусеничного экскаватора ЭКГ-5 А. Известно устройство управления электроприводами экскаватора, содержащее силовую часть и блок управления системой электроприводов экскаватора, в котором силовая часть включает понижающий трансформатор и трехфазные мостовые реверсивные тиристорные преобразователи с раздельным управлением комплектов тиристоров, блок управления содержит интерфейс и микропроцессор 1. К недостаткам данного устройства можно отнести отсутствие надежной защиты электродвигателей и рабочих механизмов экскаватора от возникновения аварийных ситуаций. Наиболее близким по технической сущности к заявляемому устройству является устройство управления электроприводами экскаватора, содержащее силовую часть и блок управления системой электроприводов экскаватора, в котором силовая часть включает силовую питающую сеть, по меньшей мере три трехфазных мостовых реверсивных тиристорных преобразователя с раздельным управлением комплектов тиристоров, которые снабжены блоками защиты от опрокидывания инвертора, однофазными диоднотиристорными выпрямителями блок управления системой электроприводов экскаватора содержит интерфейс, микропроцессор, задающие элементы устройство также снабжено датчиками переменного и постоянного тока, датчиками скорости коллекторных электродвигателей 2. Недостатком данного устройства также является отсутствие надежной защиты электродвигателей и рабочих механизмов экскаватора от возникновения аварийных ситуаций. Задачей заявленного технического решения является повышение надежности и безопасности работы электроприводов экскаватора, обеспечение защиты электродвигателей и рабочих механизмов экскаватора от возникновения аварийных ситуаций. Для решения поставленной задачи предлагается устройство управления электроприводами экскаватора, содержащее силовую часть и блок управления системой электроприводов экскаватора, в котором силовая часть включает силовую питающую сеть 1, по меньшей мере три трехфазных мостовых реверсивных тиристорных преобразователя 4 с раздельным управлением комплектов тиристоров, которые снабжены блоками 3 защиты от опрокидывания инвертора, однофазными диодно-тиристорными выпрямителями 5. Блок управления системой электроприводов экскаватора содержит интерфейс 2, микропроцессор 14, задающие элементы 6. Устройство также снабжено датчиками 13 переменного и датчиками 11 постоянного тока и измерителями 9 скорости коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экс 2 89082013.02.28 каватора. Силовая питающая сеть 1 соединена с трехфазными мостовыми реверсивными тиристорными преобразователями 4 и с однофазными диодно-тиристорными выпрямителями 5 трехфазные мостовые реверсивные тиристорные преобразователи 4 соединены с коллекторными электродвигателями 10 постоянного тока независимого возбуждения электроприводов экскаватора, а однофазные диодно-тиристорные выпрямители 5 подключены к обмоткам 12 возбуждения коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Задающие элементы 6 подключены к микропроцессору 14, который связан с интерфейсом 2, трехфазными мостовыми реверсивными тиристорными преобразователями 4, с датчиками 13 переменного и датчиками 11 постоянного тока, а также с измерителями 9 скорости коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Устройство дополнительно снабжено защитными выключателями 7, через которые трехфазные мостовые реверсивные тиристорные преобразователи 4 соединены с коллекторными электродвигателями 10 постоянного тока независимого возбуждения электроприводов экскаватора. Устройство также снабжено блоком 15 релейной автоматики,который имеет связь с микропроцессорным блоком 14 и включает в себя катушки 16 управления защитными выключателями 7 и катушки 17 управления электромагнитными тормозами 8 коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Основными технико-экономическими достоинствами заявляемого устройства управления электроприводами экскаватора являются 1) повышение надежности и безопасности работы электроприводов за счет применения автоматической системы торможения главных электроприводов экскаватора 2) повышение надежности и безопасности работы электроприводов за счет применения автоматической системы отключения якорной цепи электродвигателей постоянного тока главных электроприводов экскаватора 3) обеспечение защиты экскаватора от возникновения аварийных ситуаций. На чертеже представлена схема предлагаемого устройства управления электроприводами экскаватора. Устройство управления электроприводами экскаватора содержит силовую часть и блок управления системой электроприводов экскаватора. Силовая часть включает силовую питающую сеть 1, по меньшей мере три трехфазных мостовых реверсивных тиристорных преобразователя 4 с раздельным управлением комплектов тиристоров, которые снабжены блоками 3 защиты от опрокидывания инвертора, однофазными диоднотиристорными выпрямителями 5. Блок управления системой электроприводов экскаватора содержит интерфейс 2, микропроцессор 14, задающие элементы 6. Устройство включает датчики 13 переменного и датчики 11 постоянного тока и измерители 9 скорости коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Силовая питающая сеть 1 соединена с трехфазными мостовыми реверсивными тиристорными преобразователями 4 и с однофазными диоднотиристорными выпрямителями 5. Трехфазные мостовые реверсивные тиристорные преобразователи 4 соединены с коллекторными электродвигателями 10 постоянного тока независимого возбуждения электроприводов экскаватора, а однофазные диодно-тиристорные выпрямители 5 подключены к обмоткам 12 возбуждения коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Задающие элементы 6 подключены к микропроцессору 14, который связан с интерфейсом 2, трехфазными мостовыми реверсивными тиристорными преобразователями 4, с датчиками 13 переменного и датчиками 11 постоянного тока, а также с измерителями 9 скорости коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Устройство снабжено защитными выключателями 7, через которые трехфазные мостовые реверсивные тиристорные преобразователи 4 соединены с коллек 3 89082013.02.28 торными электродвигателями 10 постоянного тока независимого возбуждения электроприводов экскаватора. Блок 15 релейной автоматики имеет связь с микропроцессорным блоком 14 и включает в себя катушки 16 управления защитными выключателями 7 и катушки 17 управления электромагнитными тормозами 8 коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. Устройство работает следующим образом. Силовая питающая сеть 1 является источником энергии для трехфазных мостовых реверсивных тиристорных преобразователей 4 и однофазных полууправляемых диоднотиристорных выпрямителей 5. Трехфазные мостовые реверсивные тиристорные преобразователи 4 преобразуют трехфазное переменное напряжение постоянной амплитуды и частоты в регулируемые постоянные напряжения, которые формируют токи якорей коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора. В свою очередь однофазные полууправляемые диоднотиристорные выпрямители 5 преобразуют однофазное переменное напряжение силовой питающей сети 1 постоянной амплитуды и частоты в регулируемые постоянные напряжения, которые формируют токи в обмотках 12 возбуждения коллекторных электродвигателей 10 постоянного тока. Система управления главными электроприводами экскаватора построена по принципу подчиненного регулирования координат электропривода (электромагнитный момент и скорость электродвигателей) и работает следующим образом с помощью задающих элементов 6 (джойстик или командоконтроллер) машинист (оператор) экскаватора задает желаемые (заданные) скорости рабочих механизмов экскаватора (соответственно электродвигателей 10 главных электроприводов экскаватора), значения которых поступают в микропроцессорный блок 14, где происходит их сравнение с текущими значениями скоростей коллекторных электродвигателей 10 электроприводов экскаватора, сигналы которых формируют измерители скорости 9, в качестве которых могут использоваться, например,тахогенераторы, цифровые и аналоговые энкодеры и резольверы, либо наблюдатели состояния электродвигателей в случае бездатчикового варианта реализации схемы. В результате сравнения заданных и текущих скоростей электродвигателей 10 регуляторы скорости микропроцессорного блока 14 формируют заданные значения токов якорей коллекторных электродвигателей 10. Далее заданные значения токов якорей сравниваются с текущими значениями токов якорей, формируемыми датчиками 13 переменного тока. Разность значений заданных и текущих токов якорей поступает в регуляторы токов якорей микропроцессорного блока 14, которые формируют заданные значения напряжений трехфазных мостовых реверсивных тиристорных преобразователей 4. В соответствии с величиной и знаком заданных значений трехфазных мостовых реверсивных тиристорных преобразователей 4 микропроцессорный блок формирует открывающие импульсы комплектов тиристоров трехфазных мостовых реверсивных тиристорных преобразователей 4. Для стабилизации токов обмоток 12 возбуждения на номинальном уровне применяются регуляторы токов возбуждения микропроцессорного блока 14, которые сравнивают заданные (номинальные) значения токов возбуждения с текущими значениями токов возбуждения, формируемыми датчиками 11 постоянного тока. В результате сравнения заданных и текущих токов возбуждения регуляторы токов возбуждения формируют заданные значения выходных напряжений однофазных полууправляемых диоднотиристорных выпрямителей 5. Для отработки заданных значений выходных напряжений однофазных полууправляемых диодно-тиристорных выпрямителей 5 микропроцессорный блок 14 формирует открывающие импульсы комплектов тиристоров однофазных полууправляемых диодно-тиристорных выпрямителей 5. Регуляторы токов возбуждения применяются также для осуществления режима ослабления поля коллекторных электродвигателей 10 электроприводов экскаватора (данный режим необходим, например, при опускании ковша экскаватора). 4 89082013.02.28 Система подчиненного регулирования координат коллекторных электродвигателей позволяет реализовать экскаваторные механические характеристики главных электроприводов. Режим работы по данным характеристикам является основным режимом работы электроприводов экскаватора, обеспечивающим как высокую производительность экскаватора, так и обход зон возникновения аварийных токов якорей коллекторных электродвигателей постоянного тока независимого возбуждения электроприводов экскаватора. Во избежание возникновения аварийных ситуаций, связанных с возможностью опрокидывания инверторов трехфазных мостовых реверсивных тиристорных преобразователей 4, применяется блок защиты от опрокидывания инвертора 3. Учитывая крайне сложные условия эксплуатации главных электроприводов экскаватора (низкое качество питающего напряжения, высокая запыленность и вибрация, а также широкий диапазон колебаний окружающей температуры и влажности) необходимо дополнительно обеспечить защиту электрооборудования экскаватора от аварийных ситуаций. Для этих целей устройство имеет дополнительную систему защиты, которая включает в себя защитные выключатели 7 и электромагнитные тормоза 8. Для их включения и отключения используются соответственно катушки 16 и 17 управления блока 15 релейной автоматики. Управление включением и отключением катушек 16 и 17 управления осуществляется микропроцессорным блоком 14, который на основании информации о текущих и заданных значениях токов якорей и частот вращения коллекторных электродвигателей 10 постоянного тока независимого возбуждения электроприводов экскаватора формирует управляющие воздействия на катушки управления 16 и 17. Основным условием отключения защитных выключателей 7 является превышение значения тока якоря коллекторных электродвигателей 10 граничного значения аварийного тока (данное значение подбирается для каждого из электродвигателей индивидуально, учитывая условия его эксплуатации) в течение граничного времени срабатывания защиты. Основным условием наложения электромагнитного тормоза 8 является превышение рассогласования (разности заданного и текущего значений) частот вращения коллекторных электродвигателей 10 граничного значения (аналогично подбирается индивидуально для каждого из электродвигателей) рассогласования. Превышение текущего рассогласования по частоте вращения заданного граничного значения во время работы системы электроприводов свидетельствует о наличии аварийной ситуации (потеря управления электродвигателем независимо от причин, обрыв измерительной системы скорости, обрыв цепей возбуждения электродвигателей и т.д.) В нерабочем (стояночном) состоянии электромагнитные тормоза 8 находятся в наложенном состоянии, а защитные выключатели 7 - в разомкнутом состоянии. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: E02F 9/20
Метки: экскаватора, устройство, управления, электроприводами
Код ссылки
<a href="https://by.patents.su/5-u8908-ustrojjstvo-upravleniya-elektroprivodami-ekskavatora.html" rel="bookmark" title="База патентов Беларуси">Устройство управления электроприводами экскаватора</a>
Устройство управления электроприводами экскаватора
Номер патента: U 7378
Опубликовано: 30.06.2011
Авторы: Климко Иван Юрьевич, Амелько Игорь Александрович
МПК: E02F 9/20
Метки: управления, устройство, электроприводами, экскаватора
Текст:
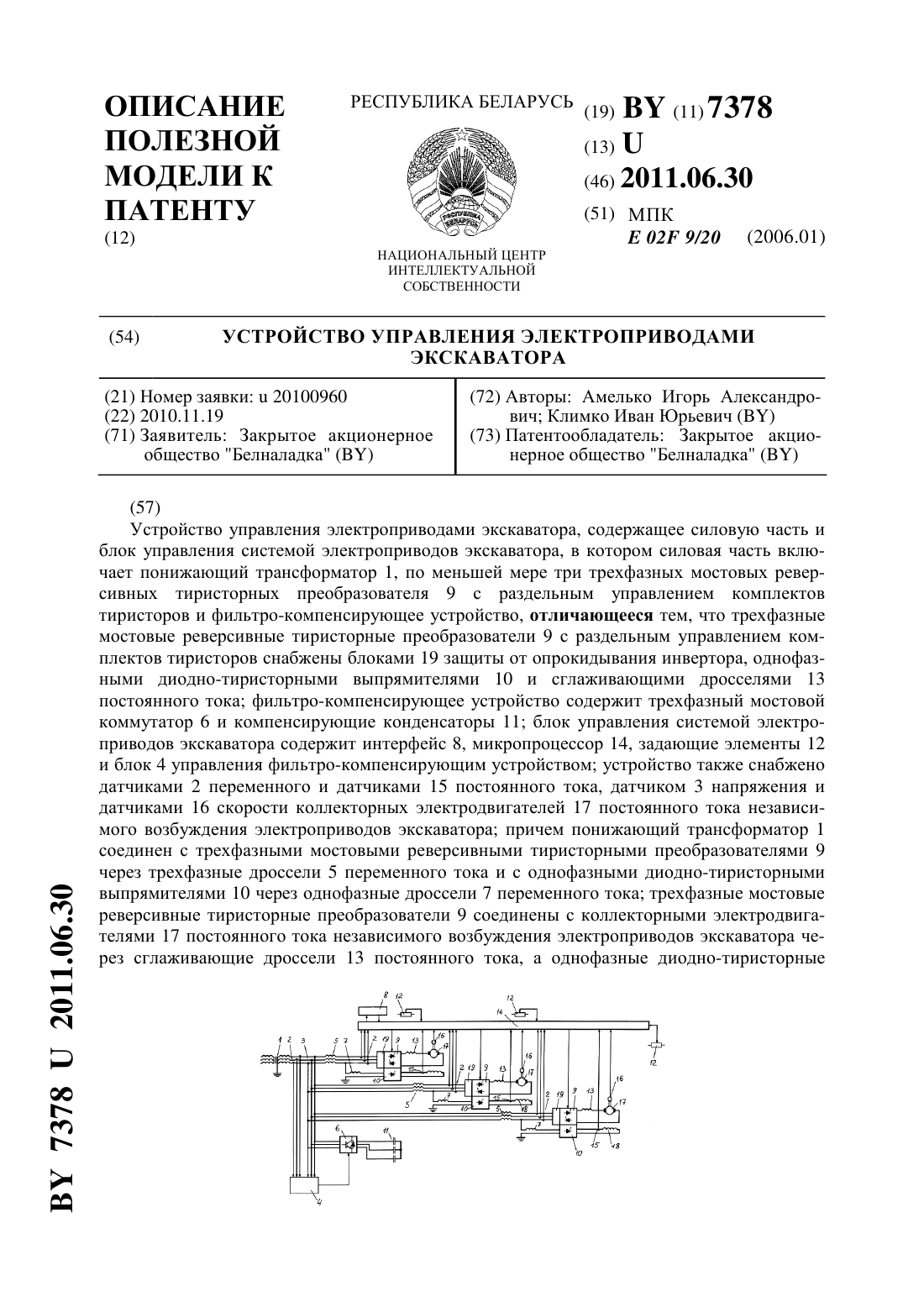
...трансформатору 1 параллельно с однофазными диоднотиристорными выпрямителями 10 и параллельно с трехфазными мостовыми реверсивными преобразователями 9 и к блоку 4 управления фильтро-компенсирующим устройством,который в свою очередь связан с датчиками 2 переменного тока и датчиком 3 переменного напряжения. Задающие элементы 12 подключены к микропроцессорному блоку 14, который связан с интерфейсным блоком 8, трехфазными мостовыми...
Устройство управления электроприводами экскаватора
Номер патента: U 4883
Опубликовано: 30.12.2008
Авторы: Амелько Игорь Александрович, Климко Иван Юрьевич
МПК: E02F 9/20
Метки: устройство, электроприводами, экскаватора, управления
Текст:
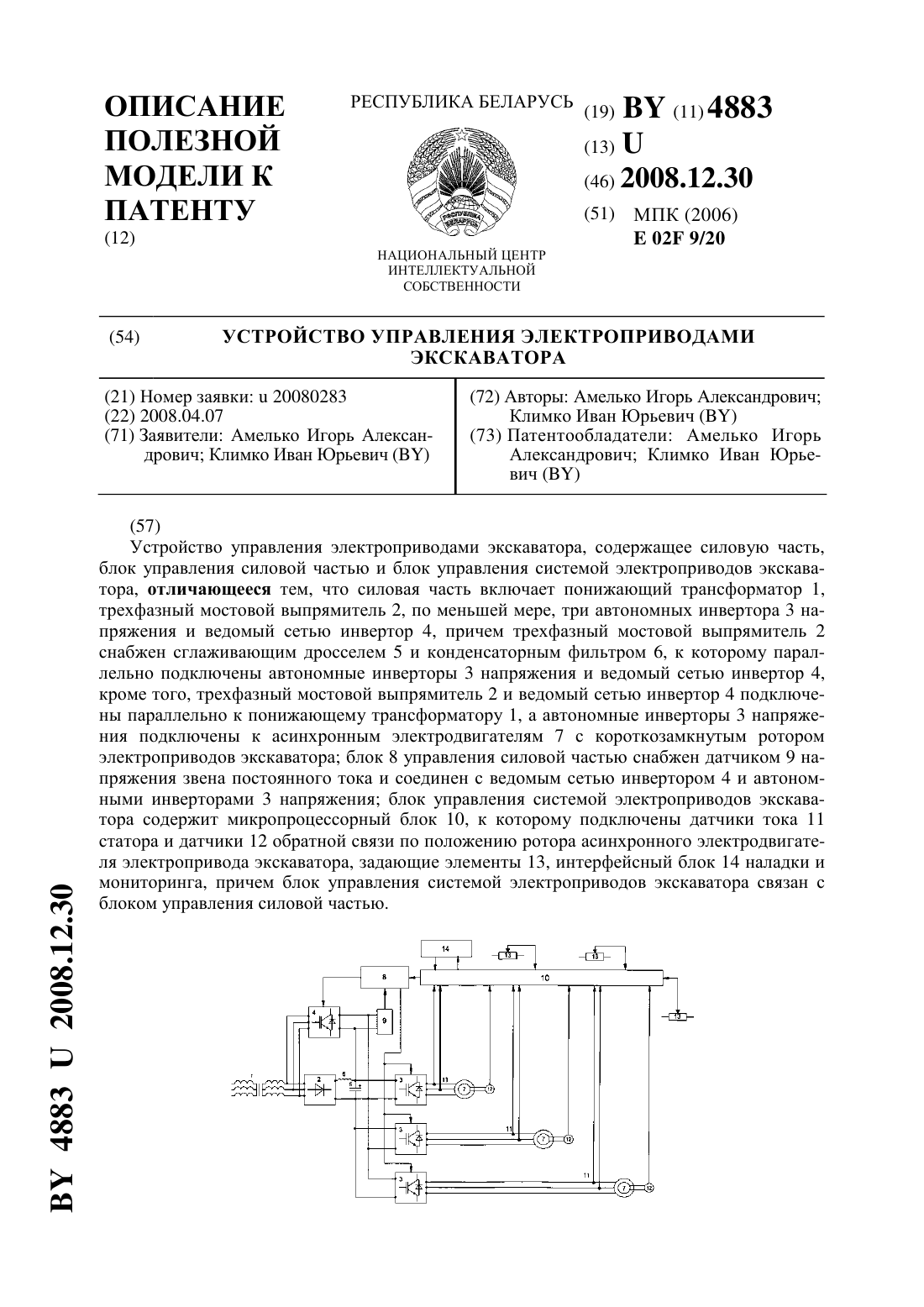
...с традиционными для экскаваторов коллекторными электродвигателями постоянного тока, а также улучшение динамики электроприводов является следствием уменьшения инерционности системы управления(цифровые регуляторы и быстродействующие датчики тока статора и датчики обратной связи по положению ротора) и инерционности силовой части электроприводов (некомпенсируемая постоянная времени автономного инвертора напряжения в десятки раз меньше,чем...
Способ управления взаимосвязанными электроприводами и устройство его реализации

Номер патента: 9707
Опубликовано: 30.08.2007
Авторы: Анкуда Денис Анатольевич, Беляев Валерий Павлович
МПК: H02P 5/74
Метки: способ, взаимосвязанными, реализации, управления, устройство, электроприводами
Текст:
...датчик фазных напряжений статора асинхронного двигателя, отличающийся тем, что он снабжен регулятором напряжения преобразователя частоты возбуждения, фильтром-формирователем, задатчиком частоты возбуждения и блоком синхронизации, содержащим задатчик скорости ротора, датчик отклонения скорости ротора и устройство вычисления скорости ротора, один из входов которого соединен с одним из выходов фильтра-формирователя, а другой вход - с одним из...
Система автоматического управления рабочим органом многоковшового цепного экскаватора
Номер патента: 11909
Опубликовано: 30.06.2009
Авторы: Науменко Анатолий Евгеньевич, Щемелёв Анатолий Мефодьевич
Метки: экскаватора, рабочим, управления, автоматического, цепного, система, многоковшового, органом
Текст:
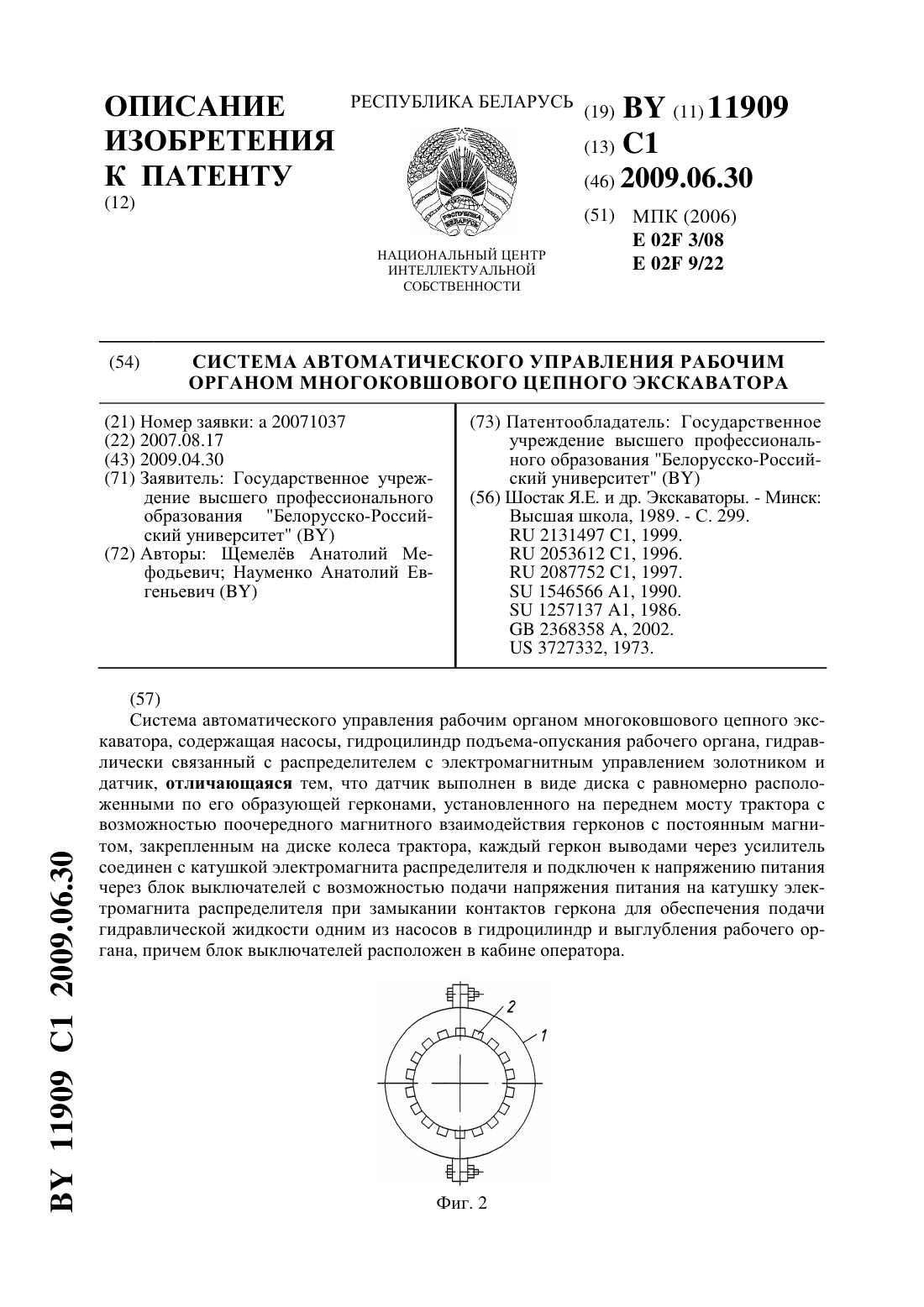
...в гидроцилиндр и выглубления рабочего органа, причем блок выключателей расположен в кабине оператора. Использование герконов в качестве системы задающей уклон траншеи позволяет простыми и дешевыми средствами обеспечить работу системы. Расположение герконов равномерно по образующей диска позволяет за счет отключения питания части герконов(через один и более) изменять уклон траншеи. Применение магнита закрепленного на диске колеса...
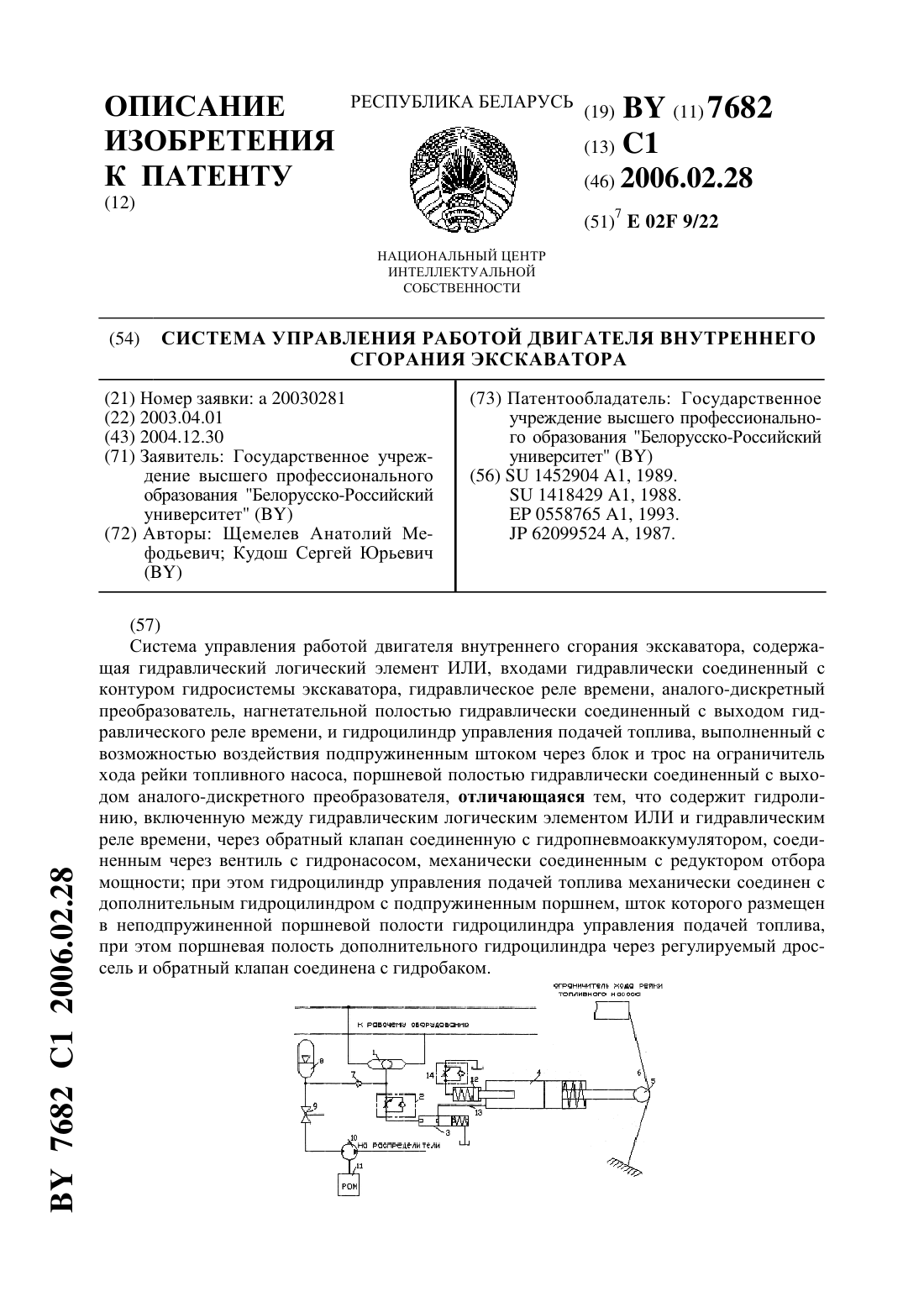
Система управления работой двигателя внутреннего сгорания экскаватора
Номер патента: 7682
Опубликовано: 28.02.2006
Авторы: Щемелев Анатолий Мефодьевич, Кудош Сергей Юрьевич
МПК: E02F 9/22
Метки: экскаватора, работой, двигателя, система, сгорания, управления, внутреннего
Текст:
...штоком через блок и трос на ограничитель хода рейки топливного насоса, поршневой полостью гидравлически соединенный с выходом аналого-дискретного преобразователя, согласно изобретению содержит гидролинию, включенную между гидравлическим логическим элементом ИЛИ и гидравлическим реле времени, через обратный клапан соединенную с гидропневмоаккумулятором, соединенным через вентиль с гидронасосом, механически соединенным с редуктором отбора...
Предыдущий патент: Стерео дальномер на цифровой фотокамере
Следующий патент: Ручной культиватор-картофелекопатель
Случайный патент: Двигатель внутреннего сгорания