Способ управления взаимосвязанными электроприводами и устройство его реализации
Номер патента: 9707
Опубликовано: 30.08.2007

Текст
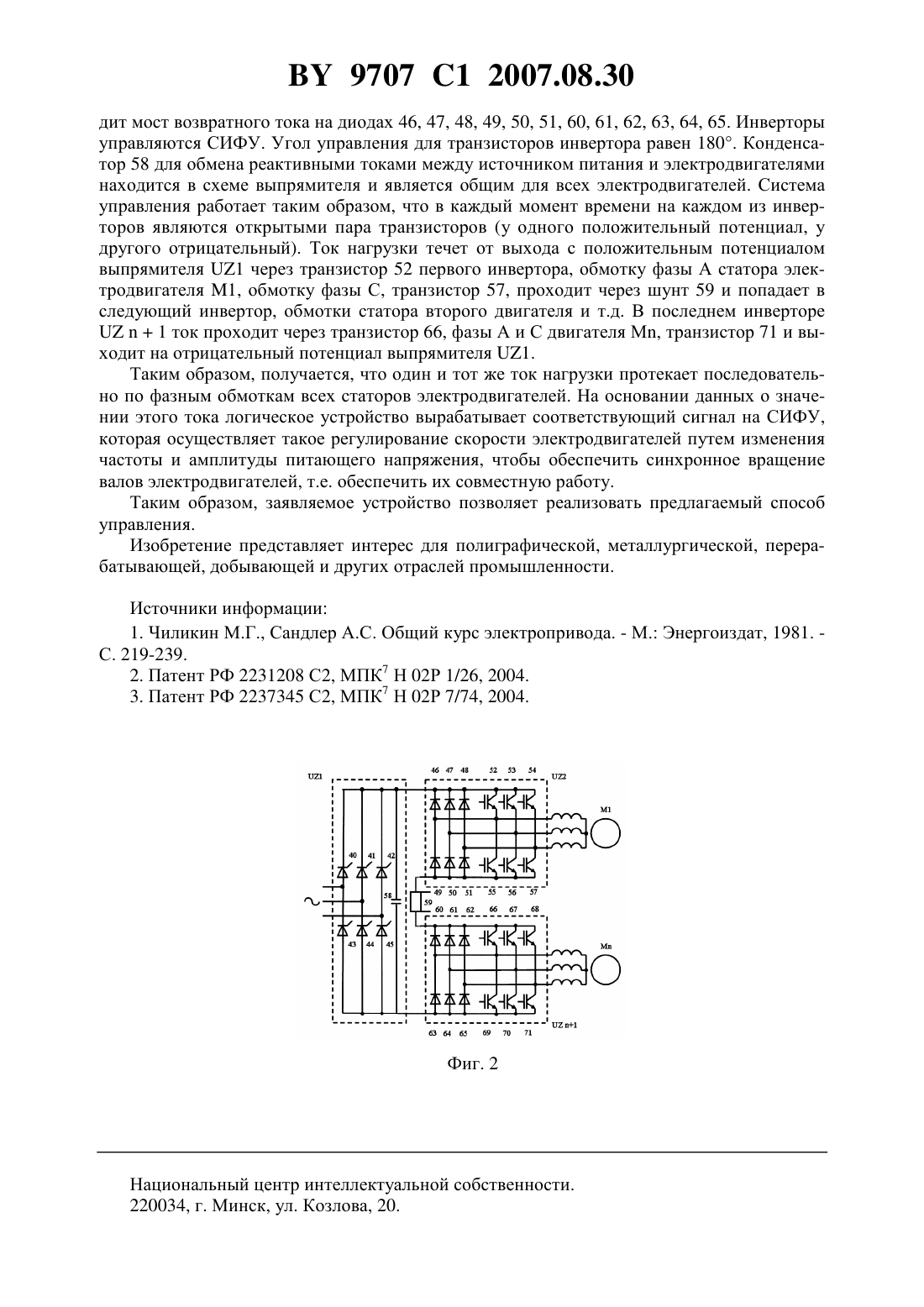
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ ВЗАИМОСВЯЗАННЫМИ ЭЛЕКТРОПРИВОДАМИ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ(71) Заявитель Учреждение образования Белорусский государственный технологический университет(72) Авторы Беляев Валерий Павлович Анкуда Денис Анатольевич(73) Патентообладатель Учреждение образования Белорусский государственный технологический университет(57) 1. Способ управления взаимосвязанными электроприводами, заключающийся в частотном управлении электромеханическими системами приводов, содержащих асинхронные электродвигатели, питающиеся от автономных инверторов, для обеспечения согласования угловой скорости вращения валов упомянутых электродвигателей путем соответствующего изменения частоты и значения выходного напряжения инверторов при равнозначном управлении их силовыми ключами, отличающийся тем, что осуществляют частотное управление электромеханическими системами приводов, содержащих асинхронные электродвигатели с короткозамкнутым ротором на всех периодах работы силовых ключей каждого инвертора обеспечивают последовательное обтекание фазных обмоток каждого электродвигателя током статической нагрузки, соответствующим равным моментам статического сопротивления на валах электродвигателей, путем соединения каждого инвертора по входу с входом последующего инвертора через шунт с возможностью измерения последним величины упомянутого тока при изменении момента статического сопротивления на валу одного из упомянутых электродвигателей и изменении угловой 9707 1 2007.08.30 скорости вращения его вала по значению изменения тока, протекающего последовательно по всем фазным обмоткам остальных электродвигателей, изменяют частоту и/или амплитуду питающего напряжения электродвигателей, на валах которых момент статического сопротивления не изменился, обратно пропорционально изменению тока в общей цепи фазных обмоток статора или пропорционально изменяют частоту и/или амплитуду питающего напряжения электродвигателя, на валу которого момент статического сопротивления изменился, и выравнивают угловое вращение указанных электродвигателей. 2. Устройство управления взаимосвязанными электроприводами, содержащими асинхронные электродвигатели, питающиеся от автономных инверторов, отличающееся тем,что каждый асинхронный электродвигатель выполнен с короткозамкнутым ротором и питается от соответствующего инвертора, выполненного на базетранзисторов и связанного с общей системой управления общая точка силовых ключей каждого инвертора,имеющая отрицательный потенциал входного напряжения, соединена через шунт с общей точкой силовых ключей последующего инвертора, имеющей положительный потенциал входного напряжения, а общая точка силовых ключей первого инвертора, имеющая положительный потенциал входного напряжения, соединена с положительным выходом первого источника постоянного тока, отрицательным выходом соединенного с положительным выходом последующего источника постоянного тока, и общая точка силовых ключей последнего инвертора, имеющая отрицательный потенциал входного напряжения, соединена с отрицательным выходом последнего источника постоянного тока или общая точка силовых ключей первого инвертора, имеющая положительный потенциал входного напряжения, соединена с положительным выходом общего источника постоянного тока, отрицательным выходом соединенного с общей точкой силовых ключей последнего инвертора, имеющей отрицательный потенциал входного напряжения, при этом шунт выполнен с возможностью измерения тока, последовательно обтекающего фазные обмотки всех статоров электродвигателей при работе взаимосвязанных электроприводов. Изобретение относится к электротехнике и может быть использовано в электроприводах производственных механизмов, где двигатели работают на общую нагрузку, например на подъемно-транспортных механизмах, многосекционных печатных машинах. Известен способ управления взаимосвязанными электроприводами на базе асинхронных электродвигателей с фазным ротором путем параллельного соединения обмоток статора двух или более асинхронных машин и последовательного соединения обмоток ротора этих машин 1. Недостатками данного способа являются малая область устойчивой работы двигателей, повышенные значения напряжения ротора, что делает необходимым введение в цепь ротора общего для всех машин сопротивления. Также недостатком данного способа являются низкие энергетические показатели, обусловленные возвратом реактивной мощности от электродвигателей в сеть. Наиболее близкими по технической сущности являются способы, техническая реализация которых представлена в 2, 3. В указанных способах согласование вращения валов достигается за счет управления двигателями по роторным цепям, когда один из двигателей является источником воздействия на электромагнитное поле второго двигателя, приводящего к выравниванию скоростей обоих двигателей 2, либо введением дополнительной противо-ЭДС от постороннего источника, например инвертора, которая пропорциональна скольжению двигателей и при рассогласовании их валов изменяется так, что их эквивалентная ЭДС подтормаживает ротор двигателя, скорость вала которого в результате изменения нагрузки оказалась выше 3. Недостатками данных способов является то, что использование асинхронных электродвигателей с фазным ротором создает повышенную сложность схемного построения взаимосвязанного электропривода, введение дополнительных устройств для управления роторными цепями и дополнительного контроля за скоростью вращения валов. 2 9707 1 2007.08.30 Задачей предлагаемого способа является упрощение схемного построения взаимосвязанных электроприводов, упрощение структуры управления путем исключения обратных связей. Поставленная задача решается тем, что способ управления взаимосвязанными электроприводами, заключающийся в частотном управлении электромеханическими системами приводов, содержащих асинхронные электродвигатели, питающиеся от автономных инверторов, для обеспечения согласования угловой скорости вращения валов упомянутых электродвигателей путем соответствующего изменения частоты и значения выходного напряжения инверторов при равнозначном управлении их силовыми ключами, отличается тем, что осуществляют частотное управление электромеханическими системами приводов,содержащих асинхронные электродвигатели с короткозамкнутым ротором на всех периодах работы силовых ключей каждого инвертора обеспечивают последовательное обтекание фазных обмоток каждого электродвигателя током статической нагрузки, соответствующим равным моментам статического сопротивления на валах электродвигателей, путем соединения каждого инвертора по входу с входом последующего инвертора через шунт с возможностью измерения последним величины упомянутого тока при изменении момента статического сопротивления на валу одного из упомянутых электродвигателей и изменении угловой скорости вращения его вала по значению изменения тока, протекающего последовательно по всем фазным обмоткам остальных электродвигателей, изменяют частоту и/или амплитуду питающего напряжения электродвигателей, на валах которых момент статического сопротивления не изменился, обратно пропорционально изменению тока в общей цепи фазных обмоток статора или пропорционально изменяют частоту и/или амплитуду питающего напряжения электродвигателя, на валу которого момент статического сопротивления изменился, и выравнивают угловое вращение указанных электродвигателей. Предлагаемый способ направлен на использование асинхронных короткозамкнутых машин, которые проще по конструкции и имеют более высокие энергетические показатели по отношению к двигателям с фазным ротором, и упрощение общей системы управления взаимосвязанным электроприводом. Способ состоит в том, что фазные обмотки всех электродвигателей обтекаются последовательно одним и тем же током статической нагрузки. В этом случае при изменении момента статического сопротивления на валу одного электродвигателя и изменении его тока и углового вращения происходит изменение тока, протекающего последовательно по всем фазным обмоткам других электродвигателей. На основании информации о значении этого тока производится соответствующее изменение частоты и(или) напряжения питания двигателей, на валах которых момент статического сопротивления не изменился, обратно пропорционально изменению тока в общей цепи фазных обмоток статора. Или, наоборот, происходит пропорциональное изменение частоты и(или) напряжения питания электродвигателя, на валу которого изменился момент статического сопротивления. За счет электромеханического преобразования энергии в электродвигателях возникает действие, приводящее к выравниванию углового вращения этих электродвигателей. Заявляемый способ частотного управления электромеханическими системами на основе асинхронных короткозамкнутых двигателей позволяет обеспечить согласованное угловое вращение валов этих электродвигателей в широких пределах. Известен взаимосвязанный электропривод, содержащий два или больше асинхронных электродвигателя с короткозамкнутым ротором и столько же асинхронных электродвигателей с фазным ротором 1. Недостатками данного электропривода являются узкие границы устойчивой работы, низкие энергетические показатели. Наиболее близким по технической сущности к заявляемому устройству управления взаимосвязанными электроприводами является электропривод переменного тока, содержащий асинхронный двигатель с фазным ротором и асинхронный возбудитель, валы которых жестко соединены между собой, обмотки статоров подключены соответственно к выходам преобразователей частоты, а обмотки роторов соединены между собой с обратным порядком чередования фаз, блок задания амплитуды напряжения статора асинхронного двигателя, выход которого соединен с одним из управляющих входов преобразовате 3 9707 1 2007.08.30 ля частоты асинхронного двигателя, и датчик фазных напряжений статора асинхронного двигателя, отличающийся тем, что он снабжен регулятором напряжения преобразователя частоты возбуждения, фильтром-формирователем, задатчиком частоты возбуждения и блоком синхронизации, содержащим задатчик скорости ротора, датчик отклонения скорости ротора и устройство вычисления скорости ротора, один из входов которого соединен с одним из выходов фильтра-формирователя, а другой вход - с одним из выходов задатчика частоты возбуждения, второй выход которого соединен с одним из управляющих входов преобразователя частоты асинхронного возбудителя, выход устройства вычисления скорости ротора подключен к одному из входов датчика отклонения скорости ротора, второй вход последнего соединен с одним из выходов задатчика скорости ротора, второй выход которого соединен со входом блока заданий амплитуды напряжений статора, выход датчика отклонения скорости ротора через регулятор напряжения подключен ко второму управляющему входу преобразователя частоты асинхронного возбудителя, а выход датчика фазных напряжений статора асинхронного двигателя подключен через фильтр-формирователь ко второму управляющему входу преобразователя частоты асинхронного двигателя 2. Также близким по технической сущности к заявляемому является двухдвигательный электропривод, содержащий два асинхронных двигателя с фазным ротором, два трехфазных мостовых выпрямителя, причем вход первого мостового выпрямителя подключен к обмоткам ротора первого двигателя, а вход второго мостового выпрямителя подключен к обмоткам ротора второго двигателя, третий выпрямитель, вход которого подключен к питающей сети, трехфазный инвертор, выход которого подключен к обмоткам статоров двигателей, соединенным параллельно, первые два мостовых выпрямителя соединены между собой параллельно, причем положительный выход первого выпрямителя соединен с положительным выходом второго выпрямителя, а отрицательный выход первого выпрямителя соединен с отрицательным выходом второго выпрямителя, к положительным выходам этих двух выпрямителей подключен положительный вход трехфазного инвертора, отрицательный вход которого подключен к отрицательному выходу третьего выпрямителя, положительный вход которого подключен к одному выводу обмотки сглаживающего реактора,другой вывод обмотки которого подключен к отрицательным выводам двух параллельно соединенных мостовых выпрямителей, отличающийся тем, что у двух параллельно соединенных мостовых выпрямителей вентили, составляющие группы отрицательного выхода выпрямителя, выполнены из диодов, а вентили, составляющие группы положительного выхода выпрямителя, выполнены из тиристоров, к управляющему электроду каждого из шести тиристоров этих двух выпрямителей подключен катод одного из шести защитных диодов,аноды которых соединены в общую точку и подключены к одному выводу регулируемого резистора, к другому выводу которого подключены соединенные в общую точку катоды других шести диодов, анод первого из этих диодов подключен к первой фазе обмотки ротора первого двигателя, анод второго диода подключен ко второй фазе обмотки ротора первого двигателя, анод третьего диода подключен к третьей фазе обмотки ротора первого двигателя, анод четвертого диода подключен к первой фазе обмотки ротора второго двигателя, анод пятого диода подключен ко второй фазе обмотки ротора второго двигателя, а анод шестого диода подключен к третьей фазе обмотки ротора второго двигателя, к общей точке соединения положительных выходов первого и второго мостовых выпрямителей подключен катод дополнительного диода, анод которого подключен к общей точке соединения отрицательных выходов первого и второго мостовых выпрямителей 3. Недостатками данных устройств является то, что они не позволяют реализовать заявляемый способ регулирования. Задачей предлагаемого устройства управления является техническая реализация заявляемого способа управления. Поставленная задача решается тем, что устройство управления взаимосвязанными электроприводами, содержащими асинхронные электродвигатели, питающиеся от автономных инверторов, отличается тем, что каждый асинхронный электродвигатель выполнен с короткозамкнутым ротором и питается от соответствующего инвертора, выполненного на базе 4 9707 1 2007.08.30 транзисторов и связанного с общей системой управления общая точка силовых ключей каждого инвертора, имеющая отрицательный потенциал входного напряжения, соединена через шунт с общей точкой силовых ключей последующего инвертора, имеющей положительный потенциал входного напряжения, а общая точка силовых ключей первого инвертора, имеющая положительный потенциал входного напряжения, соединена с положительным выходом первого источника постоянного тока, отрицательным выходом соединенного с положительным выходом последующего источника постоянного тока, и общая точка силовых ключей последнего инвертора, имеющая отрицательный потенциал входного напряжения, соединена с отрицательным выходом последнего источника постоянного тока или общая точка силовых ключей первого инвертора, имеющая положительный потенциал входного напряжения, соединена с положительным выходом общего источника постоянного тока, отрицательным выходом соединенного с общей точкой силовых ключей последнего инвертора, имеющей отрицательный потенциал входного напряжения, при этом шунт выполнен с возможностью измерения тока, последовательно обтекающего фазные обмотки всех статоров электродвигателей при работе взаимосвязанных электроприводов. Изобретение поясняется чертежами. Электрическая схема заявляемого устройства с индивидуальными источниками постоянного тока приведена на фиг. 1. Взаимосвязанный электропривод состоит изасинхронных электродвигателей с короткозамкнутым ротором 1-М,выпрямителей 1-1 --1 на тиристорах 1, 2, 3,4, 5, 6, 8, 9, 10, 11, 12, 13, управляемых СИФУ (на фигуре не указана) иинверторов напряжения 1-2 --2 натранзисторах 22, 23, 24, 25, 26, 27, 34, 35, 36, 37, 38, 39. В состав инверторов также входит мост возвратного тока на диодах 16, 17, 18, 19, 20, 21,28, 29, 30, 31, 32, 33 и конденсаторы 7, 14 для обмена реактивными токами между инвертором и электродвигателем. Инверторы управляются СИФУ. Угол управления для транзисторов инвертора равен 180. В данном взаимосвязанном электроприводе регулирование скорости электродвигателей производится путем согласованного изменения частоты и напряжения на выходе инверторов. Входы инверторов соединяются через шунт, измеряющий ток, протекающий последовательно по фазным обмоткам всех статоров электродвигателей. На основании данных о значении тока, протекающего по статорным обмоткам всех электродвигателей,регулирующее устройство, подав соответствующий сигнал на СИФУ, осуществляет реализацию заявляемого способа управления. Система управления работает таким образом,что в каждый момент времени на каждом из инверторов являются открытыми пара транзисторов (у одного положительный потенциал, у другого отрицательный). Ток нагрузки течет от выхода с положительным потенциалом первого выпрямителя через транзистор 22 первого инвертора, обмотку фазы А статора электродвигателя 1, обмотку фазы С, транзистор 27, проходит через шунт 15 и попадает в следующий инвертор 2-2, обмотки статора двигателя М 2 и т.д. В последнем инверторе-2 ток проходит через транзистор 34, фазы А и С двигателя М, транзистор 39 и выходит на отрицательный потенциал последнего выпрямителя-1. Таким образом, получается, что один и тот же ток нагрузки протекает последовательно по фазным обмоткам всех статоров электродвигателей. На основании данных о значении этого тока логическое устройство вырабатывает соответствующий сигнал на СИФУ, которая осуществляет такое регулирование скорости электродвигателей путем изменения частоты и амплитуды питающего напряжения, чтобы обеспечить синхронное вращение валов электродвигателей, т.е. обеспечить их совместную работу. Электрическая схема заявляемого устройства с общим источником постоянного тока приведена на фиг. 2. Взаимосвязанный электропривод состоит изасинхронных электродвигателей с короткозамкнутым ротором 1-М, одного выпрямителя 1 на тиристорах 40, 41, 42, 43, 44,45, управляемых СИФУ (на фигуре не указана) иинверторов напряжения 2 -1 натранзисторах 52, 53, 54, 55, 56, 57, 66, 67, 68, 69, 70, 71. В состав инверторов вхо 5 9707 1 2007.08.30 дит мост возвратного тока на диодах 46, 47, 48, 49, 50, 51, 60, 61, 62, 63, 64, 65. Инверторы управляются СИФУ. Угол управления для транзисторов инвертора равен 180. Конденсатор 58 для обмена реактивными токами между источником питания и электродвигателями находится в схеме выпрямителя и является общим для всех электродвигателей. Система управления работает таким образом, что в каждый момент времени на каждом из инверторов являются открытыми пара транзисторов (у одного положительный потенциал, у другого отрицательный). Ток нагрузки течет от выхода с положительным потенциалом выпрямителя 1 через транзистор 52 первого инвертора, обмотку фазы А статора электродвигателя 1, обмотку фазы С, транзистор 57, проходит через шунт 59 и попадает в следующий инвертор, обмотки статора второго двигателя и т.д. В последнем инверторе 1 ток проходит через транзистор 66, фазы А и С двигателя М, транзистор 71 и выходит на отрицательный потенциал выпрямителя 1. Таким образом, получается, что один и тот же ток нагрузки протекает последовательно по фазным обмоткам всех статоров электродвигателей. На основании данных о значении этого тока логическое устройство вырабатывает соответствующий сигнал на СИФУ,которая осуществляет такое регулирование скорости электродвигателей путем изменения частоты и амплитуды питающего напряжения, чтобы обеспечить синхронное вращение валов электродвигателей, т.е. обеспечить их совместную работу. Таким образом, заявляемое устройство позволяет реализовать предлагаемый способ управления. Изобретение представляет интерес для полиграфической, металлургической, перерабатывающей, добывающей и других отраслей промышленности. Источники информации 1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М. Энергоиздат, 1981. С. 219-239. 2. Патент РФ 2231208 С 2, МПК 7 Н 02 Р 1/26, 2004. 3. Патент РФ 2237345 С 2, МПК 7 Н 02 Р 7/74, 2004. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: H02P 5/74
Метки: управления, электроприводами, взаимосвязанными, устройство, способ, реализации
Код ссылки
<a href="https://by.patents.su/6-9707-sposob-upravleniya-vzaimosvyazannymi-elektroprivodami-i-ustrojjstvo-ego-realizacii.html" rel="bookmark" title="База патентов Беларуси">Способ управления взаимосвязанными электроприводами и устройство его реализации</a>
Способ управления электропотреблением и устройство для его реализации

Номер патента: 8904
Опубликовано: 28.02.2007
Авторы: Стабровский Ленгин Наполеонович, ПЕКЕЛИС ВСЕВОЛОД ГРИГОРЬЕВИЧ, Грицков Валентин Петрович
МПК: H02J 3/12
Метки: электропотреблением, управления, способ, реализации, устройство
Текст:
...способа является то. что при малых нагрузках потери мощности в устройстве регулирования напряжения Тнапример. в регулировочном автотрансформаторе) могут превосходить то снижение мощности нагрузки. которое достигается при понижении напряжения В этом случае сумма потерь энергии в устройстве регулирования напряжения И электроэнергии потребляемой нагрузкой будет больше. чем потребляемая электроэнергия до подключения устройства регулирования...
Способ формирования сигналов управления в следящих и регулируемых электроприводах и устройство для его реализации
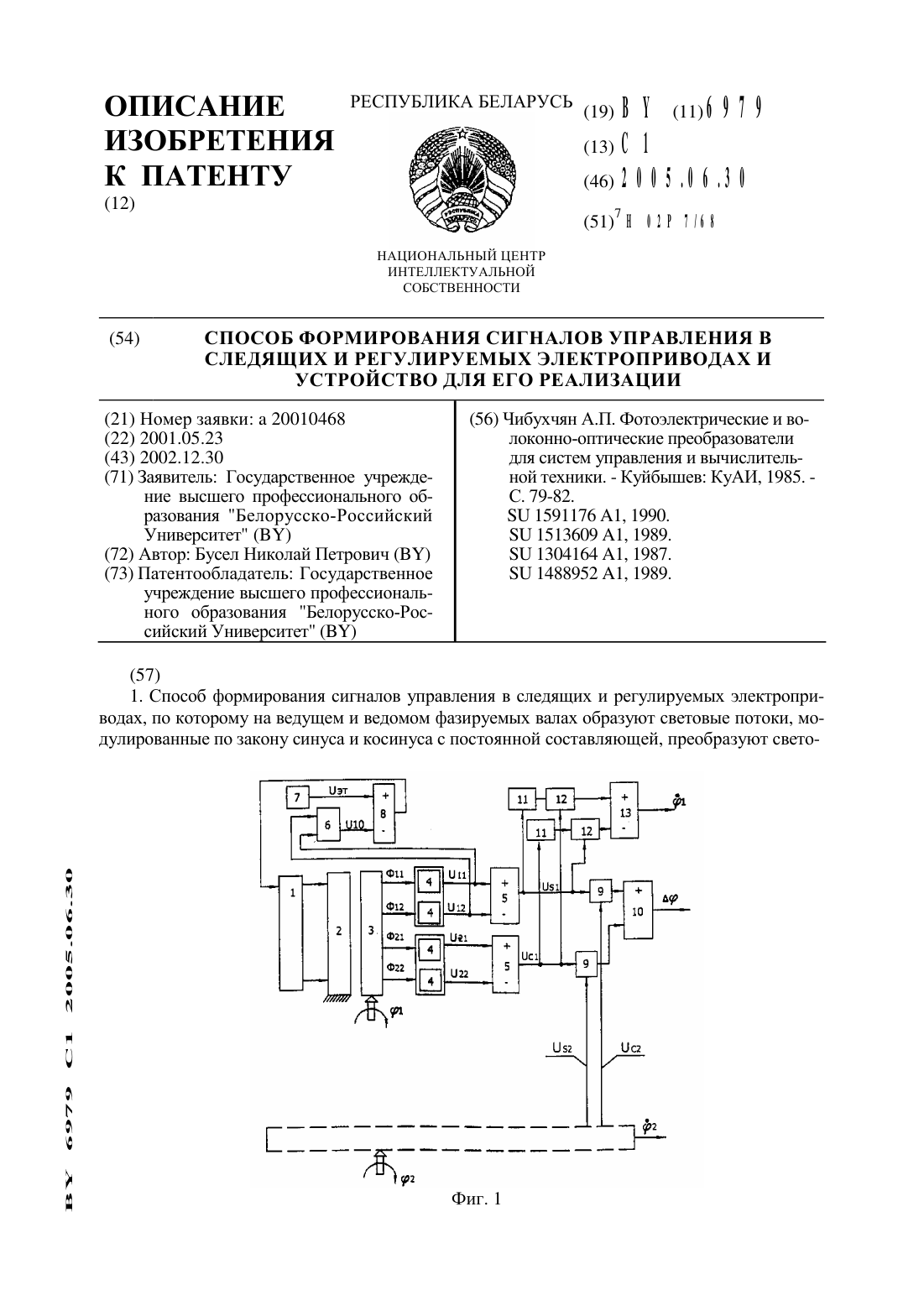
Номер патента: 6979
Опубликовано: 30.06.2005
Автор: Бусел Николай Петрович
МПК: H02P 7/68
Метки: способ, формирования, сигналов, управления, электроприводах, следящих, устройство, реализации, регулируемых
Текст:
...а выходы - с первыми входами соответствующих блоков перемножения, вторые входы которых соединены с выходами дифференциальных усилителей,формирующих квадратурные гармонические сигналы, а выходы - с прямым и инверсным входами дифференциального усилителя, на выходе которого формируется электрический сигнал управления по частоте вращения вала.8. УСТРОЙСТВО ПО П. 7, ОТЛИЧЯЮЩЕЕСЯ ТСМ, ЧТО СОДСрЖИТ два ДОПОЛНИТСЛЬНЫХ блока ПСРСМНОЖСНИЯ, ВХОДЫ...
Устройство для управления синхронным двигателем компрессора холодильника
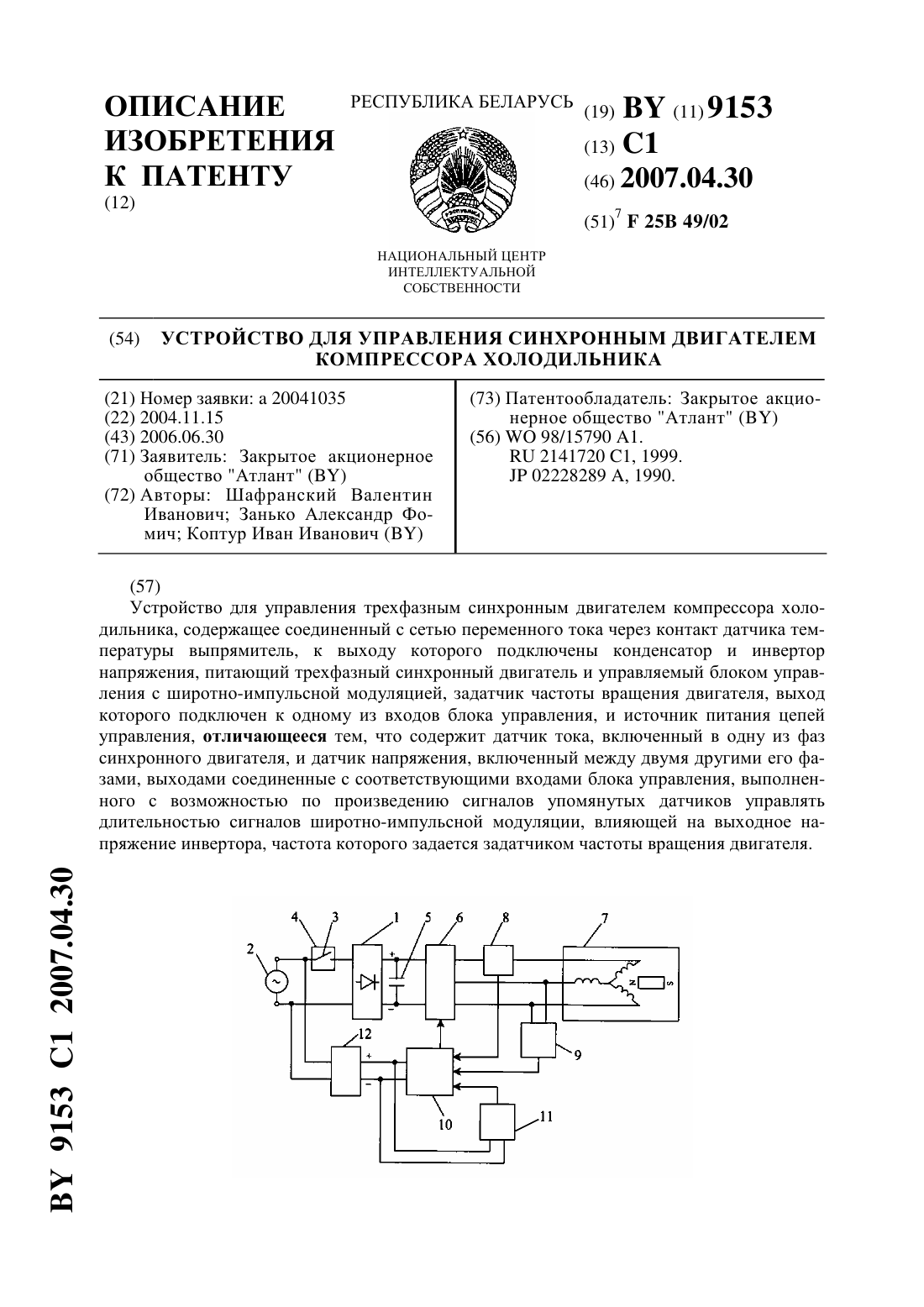
Номер патента: 9153
Опубликовано: 30.04.2007
Авторы: Занько Александр Фомич, Шафранский Валентин Иванович, Коптур Иван Иванович
МПК: F25B 49/02
Метки: устройство, синхронным, компрессора, двигателем, холодильника, управления
Текст:
...холодильника, содержащее соединенный с сетью переменного тока через контакт датчика температуры выпрямитель, к выходу которого подключены конденсатор и инвертор напряжения, питающий трехфазный синхронный двигатель и управляемый блоком управления с широтно-импульсной модуляцией, задатчик частоты вращения двигателя, выход которого подключен к одному из входов блока управления, и источник питания цепей управления, содержит датчик тока,...
Устройство для регулирования скорости асинхронного электродвигателя

Номер патента: 4959
Опубликовано: 30.03.2003
Авторы: Кебеде Нахом Демеке, Парфенович Олег Николаевич
МПК: H02P 7/36
Метки: асинхронного, электродвигателя, скорости, регулирования, устройство
Текст:
...Недостаток устройства по прототипу - сложность управления силовыми тиристорами регулятора. Задача изобретения - упрощение, повышение надежности устройства для регулирования скорости асинхронного электродвигателя. Указанная задача достигается тем, что в устройстве для регулирования скорости асинхронного электродвигателя, содержащем силовой тиристорный регулятор в цепи статорной обмотки электродвигателя, диодный распределитель импульсов,...
Способ изменения тяговой характеристики электроподвижного состава и устройство для его реализации
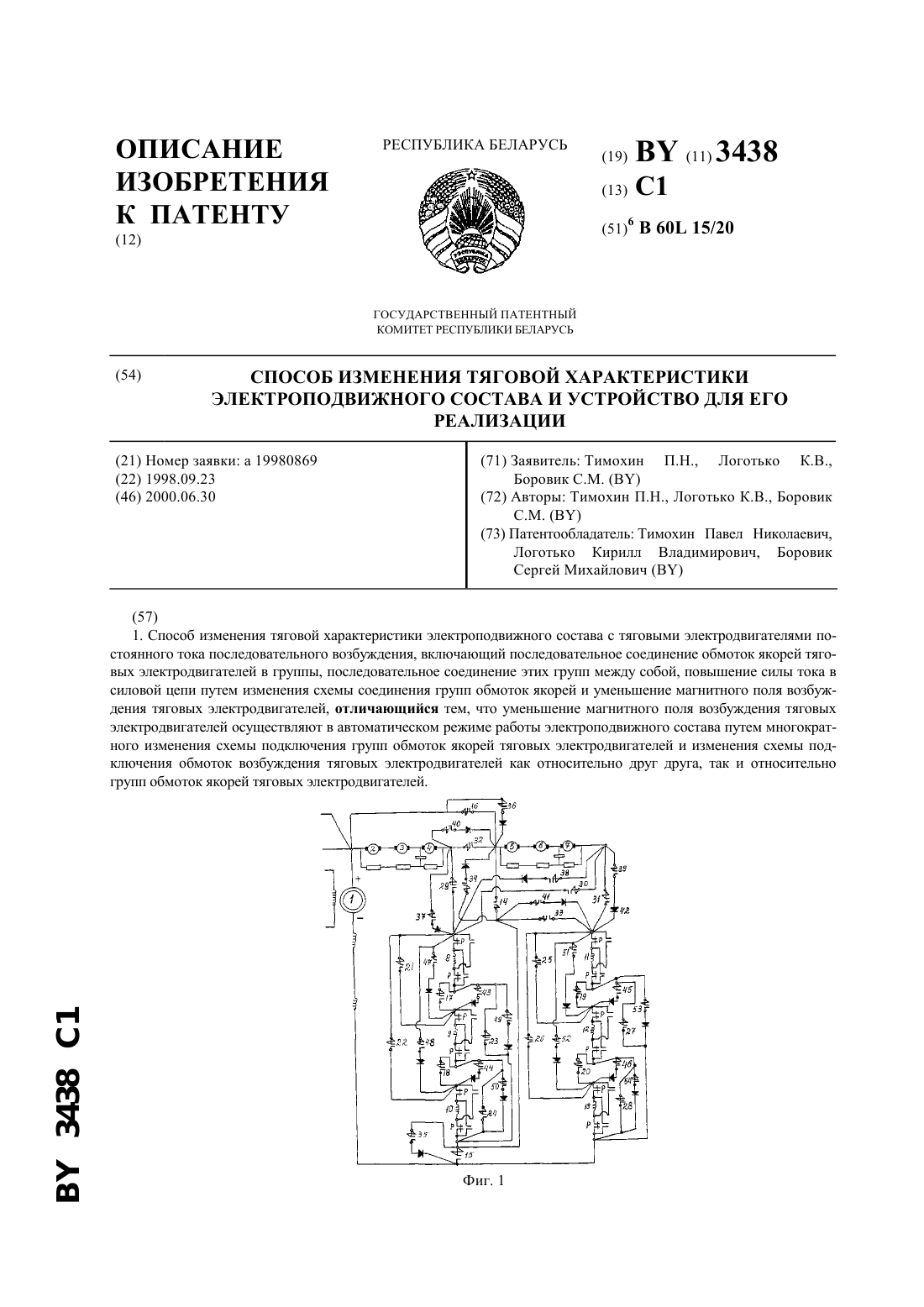
Номер патента: 3438
Опубликовано: 30.06.2000
Авторы: Логотько Кирилл Владимирович, Тимохин Павел Николаевич, Боровик Сергей Михайлович
МПК: B60L 15/20
Метки: реализации, способ, устройство, состава, характеристики, тяговой, изменения, электроподвижного
Текст:
...между собой тяговых электродвигателей, на параллельное их соединение, где диод зашунтирован с одним из отключающихся контакторов 2. Недостатком данного устройства является то, что в момент перехода с последовательного соединения тяговых электродвигателей на параллельное требуется увеличение подводимой мощности, а в то же время данное устройство имеет малый диапазон регулирования скорости. Наиболее близким по технологической...
Предыдущий патент: Катодный узел
Следующий патент: Оптический матричный пространственный модулятор света
Случайный патент: Штамп для получения изделий с анизотропной структурой