Векторный асинхронный электропривод на основе активных преобразователей
Номер патента: U 1535
Опубликовано: 30.09.2004
Авторы: Логвин Владимир Васильевич, Луковников Вадим Иванович, Рожков Антон Игоревич
Текст
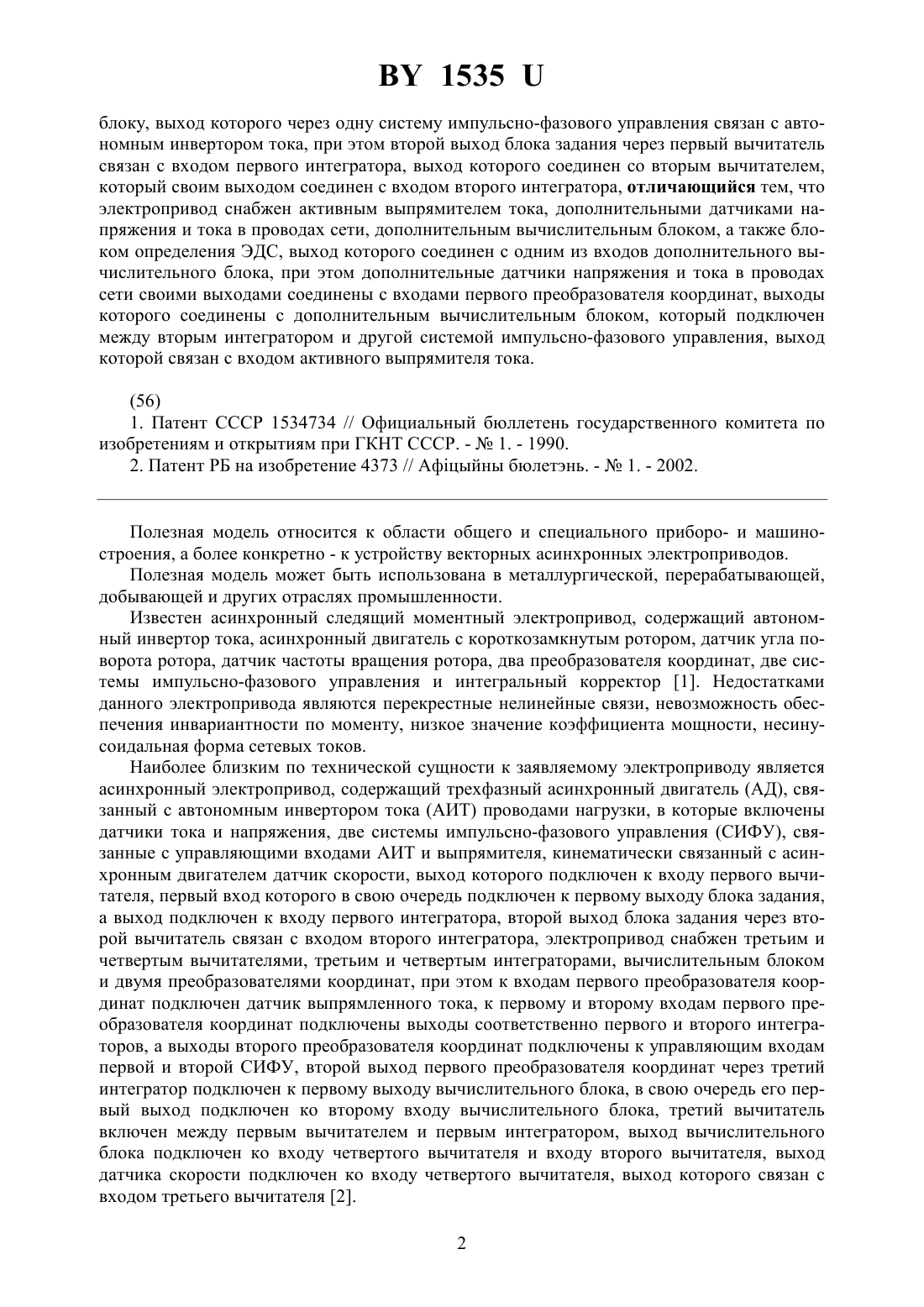
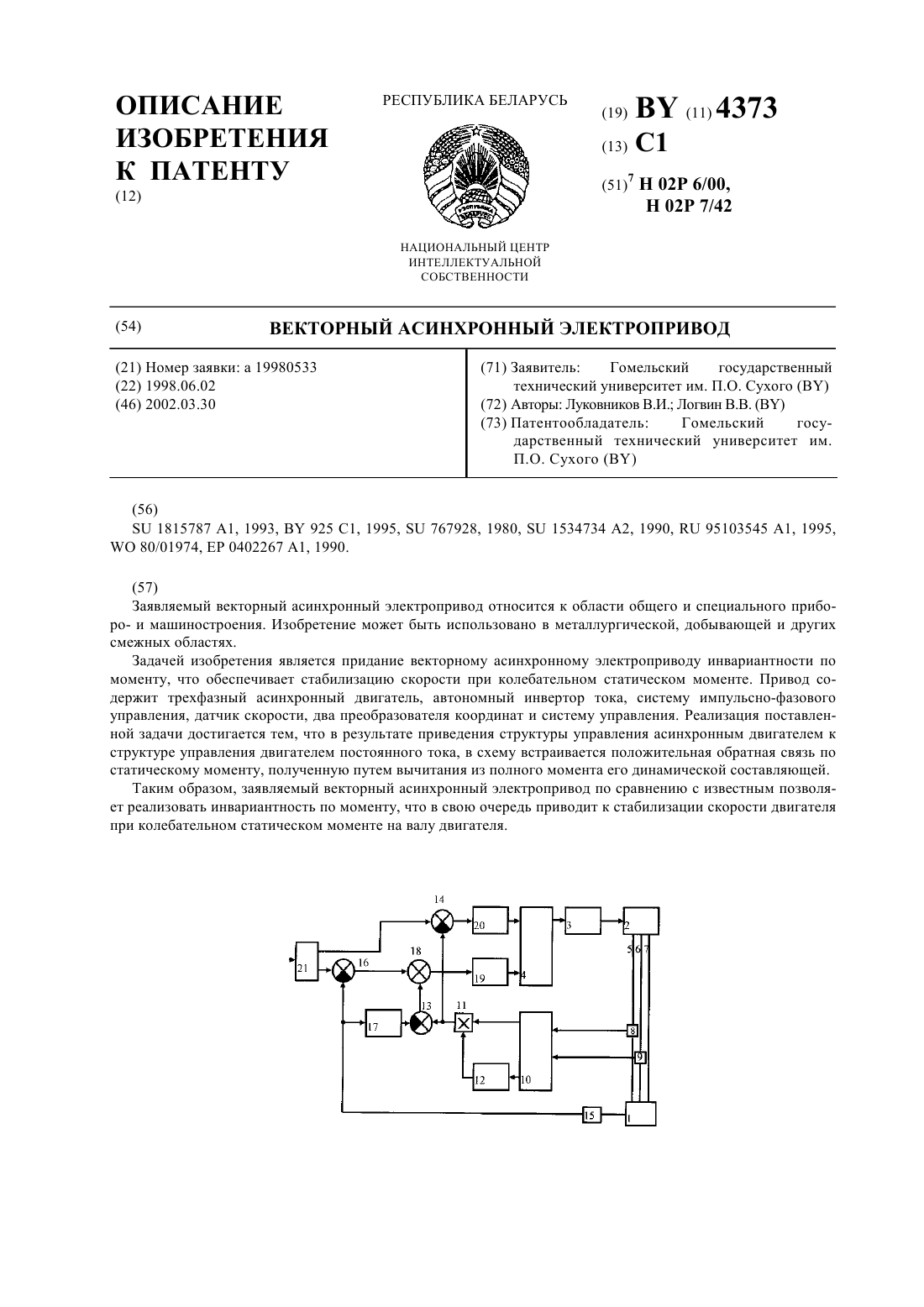
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ВЕКТОРНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД НА ОСНОВЕ АКТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ(71) Заявитель Учреждение образования Гомельский государственный технический университет имени П.О. Сухого(72) Авторы Луковников Вадим Иванович Логвин Владимир Васильевич Рожков Антон Игоревич(73) Патентообладатель Учреждение образования Гомельский государственный технический университет имени П.О. Сухого(57) Векторный асинхронный электропривод, содержащий трехфазный асинхронный двигатель, автономный инвертор тока, датчики тока и напряжения в проводах нагрузки, блок определения момента, датчики скорости и выпрямленного тока, блок задания, первый,второй, третий и четвертый вычитатели, первый, второй, третий и четвертый интеграторы,две системы импульсно-фазового управления, сумматор, первый и второй преобразователи координат, вычислительный блок, при этом трехфазный асинхронный двигатель проводами нагрузки связан с автономным инвертором тока, а также кинематически связан с датчиком скорости, выход которого подключен к входу третьего вычитателя, первый вход которого подключен к первому выходу блока задания, а выход третьего вычитателя подключен к входу сумматора, выход которого подключен к входу третьего интегратора, выход которого соединен с входом четвертого вычитателя, выход которого соединен с входом четвертого интегратора, выход которого подключен ко второму вычислительному 1535 блоку, выход которого через одну систему импульсно-фазового управления связан с автономным инвертором тока, при этом второй выход блока задания через первый вычитатель связан с входом первого интегратора, выход которого соединен со вторым вычитателем,который своим выходом соединен с входом второго интегратора, отличающийся тем, что электропривод снабжен активным выпрямителем тока, дополнительными датчиками напряжения и тока в проводах сети, дополнительным вычислительным блоком, а также блоком определения ЭДС, выход которого соединен с одним из входов дополнительного вычислительного блока, при этом дополнительные датчики напряжения и тока в проводах сети своими выходами соединены с входами первого преобразователя координат, выходы которого соединены с дополнительным вычислительным блоком, который подключен между вторым интегратором и другой системой импульсно-фазового управления, выход которой связан с входом активного выпрямителя тока.(56) 1. Патент СССР 1534734 // Официальный бюллетень государственного комитета по изобретениям и открытиям при ГКНТ СССР. -1. - 1990. 2. Патент РБ на изобретение 4373 // Афцыйны бюлетэнь. -1. - 2002. Полезная модель относится к области общего и специального приборо- и машиностроения, а более конкретно - к устройству векторных асинхронных электроприводов. Полезная модель может быть использована в металлургической, перерабатывающей,добывающей и других отраслях промышленности. Известен асинхронный следящий моментный электропривод, содержащий автономный инвертор тока, асинхронный двигатель с короткозамкнутым ротором, датчик угла поворота ротора, датчик частоты вращения ротора, два преобразователя координат, две системы импульсно-фазового управления и интегральный корректор 1. Недостатками данного электропривода являются перекрестные нелинейные связи, невозможность обеспечения инвариантности по моменту, низкое значение коэффициента мощности, несинусоидальная форма сетевых токов. Наиболее близким по технической сущности к заявляемому электроприводу является асинхронный электропривод, содержащий трехфазный асинхронный двигатель (АД), связанный с автономным инвертором тока (АИТ) проводами нагрузки, в которые включены датчики тока и напряжения, две системы импульсно-фазового управления (СИФУ), связанные с управляющими входами АИТ и выпрямителя, кинематически связанный с асинхронным двигателем датчик скорости, выход которого подключен к входу первого вычитателя, первый вход которого в свою очередь подключен к первому выходу блока задания,а выход подключен к входу первого интегратора, второй выход блока задания через второй вычитатель связан с входом второго интегратора, электропривод снабжен третьим и четвертым вычитателями, третьим и четвертым интеграторами, вычислительным блоком и двумя преобразователями координат, при этом к входам первого преобразователя координат подключен датчик выпрямленного тока, к первому и второму входам первого преобразователя координат подключены выходы соответственно первого и второго интеграторов, а выходы второго преобразователя координат подключены к управляющим входам первой и второй СИФУ, второй выход первого преобразователя координат через третий интегратор подключен к первому выходу вычислительного блока, в свою очередь его первый выход подключен ко второму входу вычислительного блока, третий вычитатель включен между первым вычитателем и первым интегратором, выход вычислительного блока подключен ко входу четвертого вычитателя и входу второго вычитателя, выход датчика скорости подключен ко входу четвертого вычитателя, выход которого связан с входом третьего вычитателя 2. 2 1535 Недостатками данного устройства являются низкие энергетические показатели, обусловленные возвратом реактивной мощности от нагрузки, которая чаще всего является активно-индуктивной, в сеть, несовершенством алгоритма работы полупроводниковых ключей, приводящая к появлению гармоник в сетевых токах. Задачей настоящей полезной модели является улучшение энергетических показателей векторного асинхронного электропривода, инвариантного к моменту нагрузки, а именно повышение величины коэффициента мощности до 0,99, получение формы сетевого тока,близкой к синусоидальной, путем использования активных преобразователей в выпрямительной части электропривода. Поставленная задача решается тем, что в известное устройство, содержащее трехфазный асинхронный двигатель, автономный инвертор тока, датчики тока и напряжения в проводах нагрузки, блок определения момента, датчики скорости и выпрямленного тока,блок задания, первый, второй, третий и четвертый вычитатели, первый, второй, третий и четвертый интеграторы, две системы импульсно-фазового управления, сумматор, первый и второй преобразователи координат, вычислительный блок, при этом трехфазный асинхронный двигатель проводами нагрузки связан с автономным инвертором тока, а также кинематически связан с датчиком скорости, выход которого подключен к входу третьего вычитателя, первый вход которого подключен к первому выходу блока задания, а выход третьего вычитателя подключен к входу сумматора, выход которого подключен к входу третьего интегратора, выход которого соединен с входом четвертого вычитателя, выход которого соединен с входом четвертого интегратора, выход которого подключен ко второму вычислительному блоку, выход которого через одну систему импульсно-фазового управления связан с автономным инвертором тока, при этом второй выход блока задания через первый вычитатель связан с входом первого интегратора, выход которого соединен со вторым вычитателем, который своим выходом соединен с входом второго интегратора,согласно модели, введен активный выпрямитель тока, дополнительные датчики напряжения и тока в проводах сети, дополнительный вычислительный блок, а также блок определения ЭДС, выход которого соединен с одним из входов дополнительного вычислительного блока, при этом дополнительные датчики напряжения и тока в проводах сети своими выходами соединены с входами первого преобразователя координат, выходы которого соединены с дополнительным вычислительным блоком, который подключен между вторым интегратором и другой системой импульсно-фазового управления, выход которой связан с входом активного выпрямителя тока. За счет введения активного выпрямителя тока и прогнозирующей системы управления, реализованной с помощью дополнительных датчиков напряжения и тока в сетевых проводах, дополнительного вычислительного блока и блока определения ЭДС, стало возможным обеспечить коэффициент мощности 0,99, и так как полупроводниковые ключи работают в режиме широтно-импульсной модуляции и частота модуляции велика, обеспечивается синусоидальная форма сетевого тока. На чертеже представлена структурная схема заявляемого электропривода. Данный электропривод - инвариантный по моменту, векторный, асинхронный энергосберегающий - содержит трехфазный АД 1, подключенный к АИТ 2, который входами соединен с выходами активного выпрямителя тока (АВТ) 3. В проводах сети установлены датчики напряжения и тока 4, 5, 6, выходы которых соединены с входами первого преобразователя координат (ПК) 7, выход которого соединен с входом первого вычислительного блока 8. Первый вход первого вычитателя 9 соединен со вторым выходом блока задания (БЗ) 10, а второй вход соединен с выходом второго ПК 11. Выход первого вычитателя 9 соединен с входом первого интегратора 12, выход которого соединен с входом второго вычитателя 13. Второй вход указанного вычитателя соединен со следующим выходом второго ПК 11. Выход второго вычитателя 13 соединен с входом второго интегратора 14, выход которого соединен с входом первого вычислительного блока 8. Входы данного блока 8 соединены с выходом первого ПК 7 и выходом блока определения ЭДС (БОЭ) 15, а также с выходом 3 1535 датчика выпрямленного тока 16. Выход первого вычислительного блока 8 соединен с входом первой СИФУ 17, выход которой соединен с входом АВТ 3. Также вход АВТ 3 соединен с проводами сети. Один вход третьего вычитателя 18 соединен с первым выходом БЗ 10, а другой вход третьего вычитателя 18 соединен с выходом датчика скорости 19,вход которого соединен кинематически с валом АД 1. Выход датчика скорости 19 соединен с входом блока определения момента (БОМ) 20. Выход вычитателя 18 соединен с входом сумматора 21, другой вход которого соединен с выходом БОМ 20. Выход сумматора 21 соединен с входом третьего интегратора 22, выход которого соединен с четвертым вычитателем 23, второй вход которого соединен с выходом второго ПК 11. Выход четвертого вычитателя 23 соединен с входом четвертого интегратора 24. Его выход соединен с входом второго вычислительного блока 25, выход которого соединен с входом второй СИФУ 26. Выход второй СИФУ 26 соединен с входом АИТ 2. В линейных проводах соединяющие выходы АИТ 2 с входами АД 1, установлены датчики напряжения и тока 27,28, 29. Выходы которых соединены с входами второго преобразователя координат 11. Его выходы соединены с входами БОЭ 15, а также с входами вычитателей 23, 9, 13. Выходы АВТ 3 и входы АИТ 2 соединены между собой двумя проводами, в одном из которых установлен датчик выпрямленного тока 16. Выход которого соединен с первым вычислительным блоком 8. Заявляемый электропривод работает следующим образом. Весь электропривод можно разделить на два канала 1) канал регулирования потокосцепления ротора и коэффициента мощности, представленный БЗ 10, первым вычитателем 9, первым интегратором 12, вторым вычитателем 13,вторым интегратором 14, первым вычислительным блоком 8, первой СИФУ 17 и АВТ 3 2) канал стабилизации скорости, представленный БЗ 10, третьим вычитателем 18,сумматором 21, третьим интегратором 22, четвертым вычитателем 23, четвертым интегратором 24, вторым вычислительным блоком 25, второй СИФУ 26, АИТ 2. Оба канала получают сигналы задания от БЗ 10. Сигнал задания потокосцепления ротора приходит на первый вычитатель 9, где от него отнимается сигнал, характеризующий истинное значение потокосцепления. Разностный сигнал поступает на регулятор потокосцепления, выполненный на первом интеграторе 12. Выходом которого является сигнал задания на составляющую тока, который приходит на второй вычитатель 13, где получают разницу заданного сигнала и сигнала, пропорционального истинному значению составляющей тока. Разностный сигнал поступает на второй интегратор 14, осуществляющий регулирование выходного сигнала, который поступает на первый вычислительный блок 8. Также на него поступают сигналы о величине ЭДС нагрузки, величине выпрямленного тока и состоянии сетевых токов и напряжений. Выходной сигнал первого вычислительного блока 8 формирует сигнал управления на первую СИФУ 17. Выходные сигналы первой СИФУ 17 поступают на вход АВТ 3. Также входы АВТ 3 соединены с сетевыми проводами, в которых установлены датчики напряжений и токов 4, 5, 6. Выходные сигналы с этих датчиков поступают на первый ПК 7, выходные сигналы с него поступают на первый вычислительный блок 8, в котором определяется состояние сети. Выходным сигналом АВТ 3 является выпрямленный ток. Его величина определяется с помощью датчика выпрямленного тока 16. Сигнал с которого поступает на первый вычислительный блок 8. Выпрямленный ток является входным сигналом для АИТ 2. Также на АИТ 2 поступают выходные сигналы со второй СИФУ 26, которая является последним звеном в канале стабилизации скорости. Так же как и для первого канала, из БЗ 10 поступает сигнал задания скорости,следующий на вход третьего вычитателя 18. То есть от заданного сигнала отнимается истинное значение скорости, определяемое посредством датчика скорости 19. Сигнал рассогласования с выхода третьего вычитателя 18 поступает на сумматор 21, куда заведена положительная обратная связь, пропорциональная колебательной составляющей момента нагрузки. Эта составляющая определяется посредством БОМ 20, входными сигналами ко 4 1535 торого являются сигнал о скорости вращения ротора и величине потокосцепления ротора. Выходной сигнал с сумматора 21 поступает на третий интегратор 22. Выходной сигнал которого является сигналом задания на составляющую тока, контура регулирования момента двигателя, который поступает на четвертый вычитатель 23, где он сравнивается с сигналом, пропорциональным истинному значению составляющей тока контура регулирования момента двигателя. Выходной сигнал с четвертого вычитателя 23 поступает на четвертый интегратор 24, который осуществляет регулирования составляющей тока. Выходной сигнал является входной величиной для второго вычислительного блока 25. Также на него поступает сигнал со второго интегратора 14. Выход второго вычислительного блока 25 соединен с входом второй СИФУ 26, которая и формирует сигналы управления для работы АИТ 2. Выходными сигналами АИТ 2 являются линейные токи АД 1. В линейных проводах АД 1 установлены датчики напряжения и тока 27, 28, 29, выходные сигналы которых проступают на вход второго ПК 11. Выходными сигналами его будут потокосцепление ротора, составляющие токов и напряжений. Эти выходные сигналы поступают не только на вычитатели 23, 13, 9 в каналах регулирования, но и на БОЭ 15. Выходной сигнал с БОЭ 15 поступает на первый вычислительный блок 8. Для обеспечения требуемых показателей качества потребляемого тока служат датчики напряжений и токов в проводах сети 4, 5, 6, которые собирают информацию о текущем состоянии сети, в тоже время БОЭ 15 определяет текущее состояние двигателя. Полученная информация поступает на первый вычислительный блок 8, который работает в режиме прогнозирующего управления,то есть вычисляет все возможные векторы сетевого тока, которые возможно создать в данный момент времени, управляя АВТ 3. Из полученного набора векторов выбирается тот, который способен обеспечить коэффициент мощности 0,99. Сам же АВТ 3 работает в режиме широтно-импульсной модуляции и способен обеспечить синусоидальную форму сетевого тока. Таким образом, заявляемый векторный асинхронный электропривод на основе активных преобразователей инвариантный к колебательному моменту нагрузки, позволяет повысить коэффициент мощности до величины, равной 0,99, что для сети является почти полностью активной нагрузкой, устраняет нежелательное протекание реактивных токов в сетевых проводах, а также формирует синусоидальную форму сетевого тока. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H02P 6/00
Метки: электропривод, основе, векторный, преобразователей, активных, асинхронный
Код ссылки
<a href="https://by.patents.su/5-u1535-vektornyjj-asinhronnyjj-elektroprivod-na-osnove-aktivnyh-preobrazovatelejj.html" rel="bookmark" title="База патентов Беларуси">Векторный асинхронный электропривод на основе активных преобразователей</a>
Векторный асинхронный электропривод
Номер патента: 4373
Опубликовано: 30.03.2002
Авторы: Луковников Вадим Иванович, Логвин Владимир Васильевич
Метки: электропривод, асинхронный, векторный
Текст:
...10. Первый выход второго преобразователя координат подключен на вход блока перемножения 11, на второй вход которого подается сигнал с выхода третьего интегратора 12. Вход третьего интегратора 12 соединен с вторым выходом второго преобразователя координат 10. Выход блока перемножения 11 подключен к суммирующему входу четвертого сумматора 13 и вычитающему входу второго сумматора 14. Асинхронный двигатель 1 кинематически связан с датчиком...
Электропривод переменного тока
Номер патента: 3764
Опубликовано: 30.12.2000
Авторы: Павлов Владимир Иванович, Коваль Александр Сергеевич, Тюшкевич Леонид Михайлович
Метки: электропривод, переменного, тока
Текст:
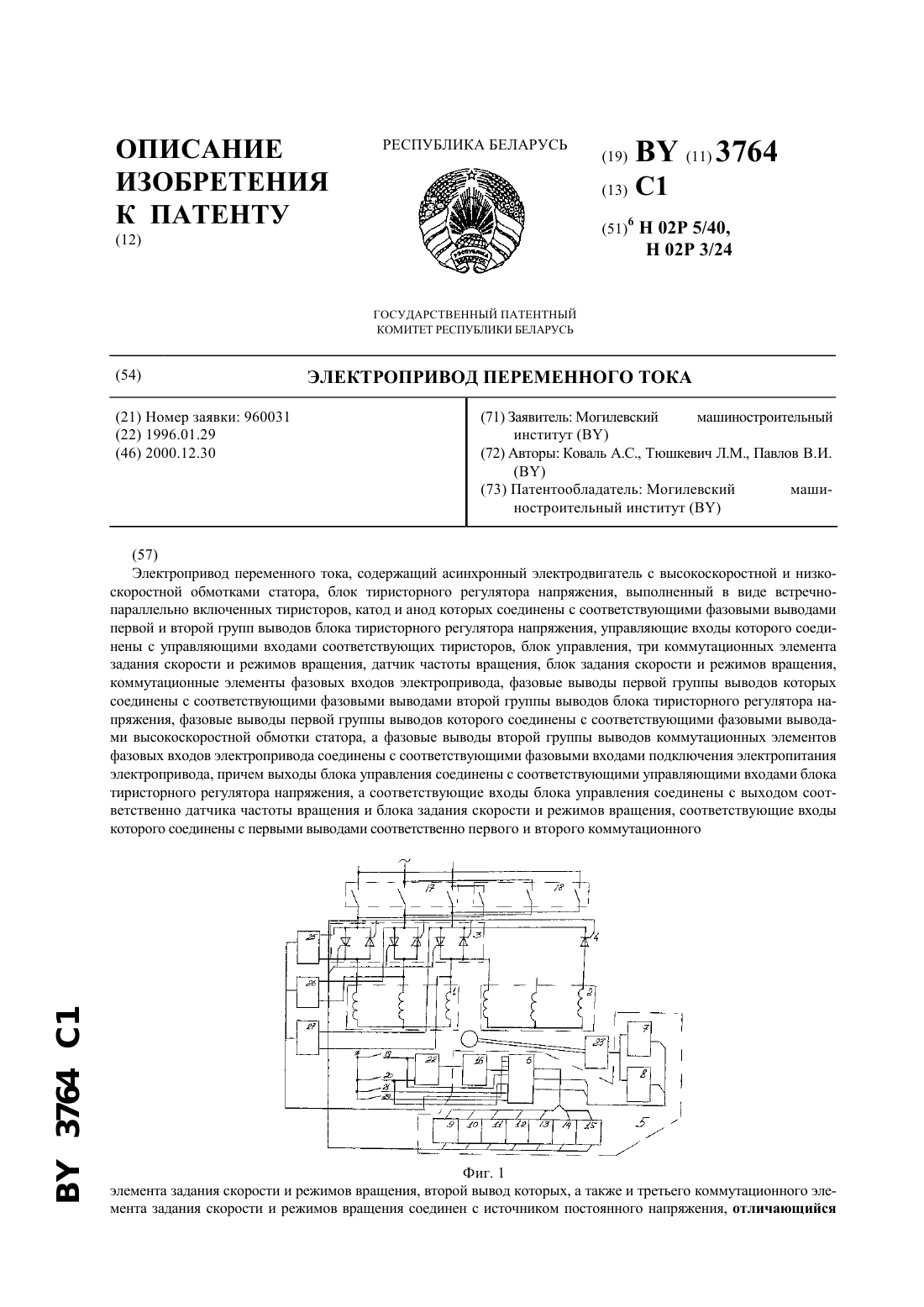
...с соответствующими входами блока управления. Сущность изобретения поясняется чертежами на фиг. 1 приведена схема электропривода переменного тока на фиг. 2 - диаграммы, поясняющие его работу. Электропривод переменного тока содержит асинхронный двигатель с высокоскоростной обмоткой 1 и низкоскоростной обмоткой 2 статора блок тиристорного регулятора напряжения 3, выполненный в виде встречнопараллельно включенных тиристоров, катод и анод...
Устройство числового программного управления
Номер патента: 5128
Опубликовано: 30.06.2003
Авторы: Каштальян Иван Алексеевич, Пархутик Алексей Петрович, Резниченко Владимир Иванович
МПК: G05B 19/18, G05B 19/416
Метки: управления, программного, устройство, числового
Текст:
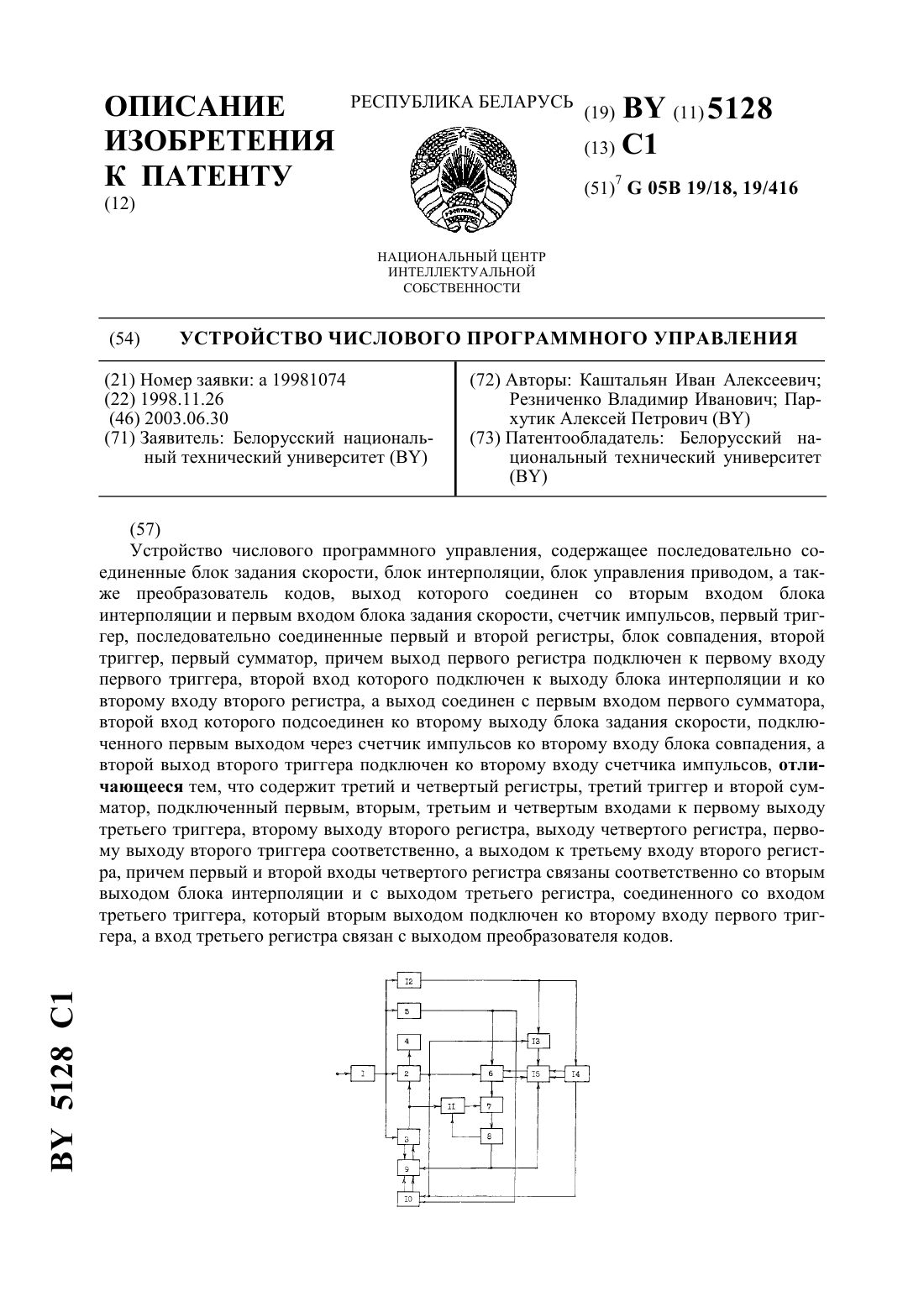
...введены третий и четвертый регистры, третий триггер и второй сумматор, подключенный первым, вторым, третьим и четвертым входами к первому выходу третьего триггера, второму выходу второго регистра, выходу четвертого регистра,2 5128 1 первому выходу второго триггера соответственно, а выходом к третьему входу второго регистра, причем первый и второй входы четвертого регистра связаны соответственно со вторым выходом блока интерполяции и с...
Формирователь импульсов из синусоидального сигнала
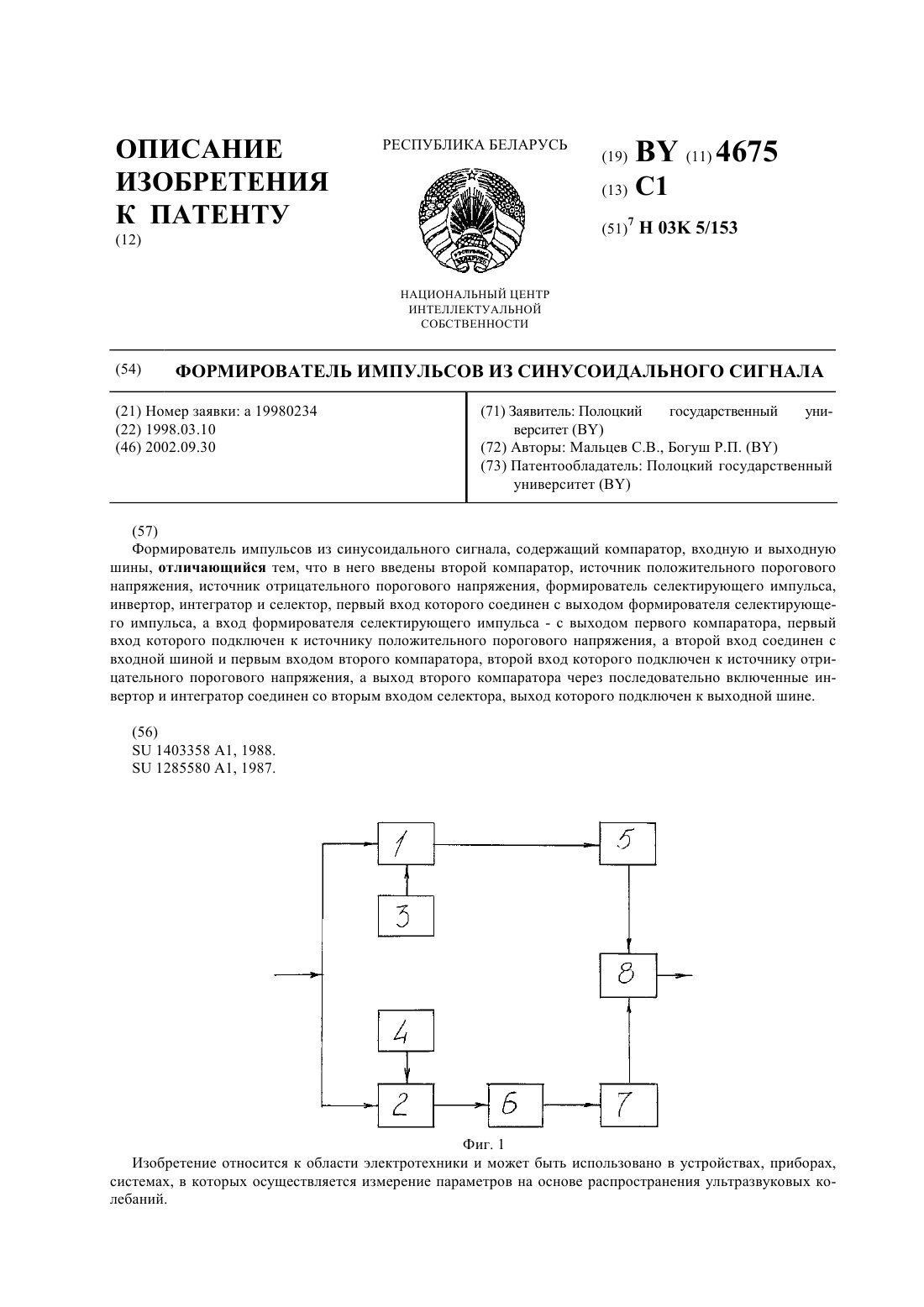
Номер патента: 4675
Опубликовано: 30.09.2002
Авторы: Мальцев Сергей Васильевич, Богуш Рихард Петрович
МПК: H03K 5/153
Метки: синусоидального, формирователь, сигнала, импульсов
Текст:
...- с выходом первого компаратора, первый вход которого подключен к источнику положительного порогового напряжения, а второй вход соединен со входной шиной и первым входом второго компаратора, второй вход которого подключен к источнику отрицательного порогового напряжения, а выход второго компаратора, через последовательно включенные инвертор и интегратор, соединен со вторым входом селектора, выход которого подключен к выходной шине....
Устройство числового программного управления
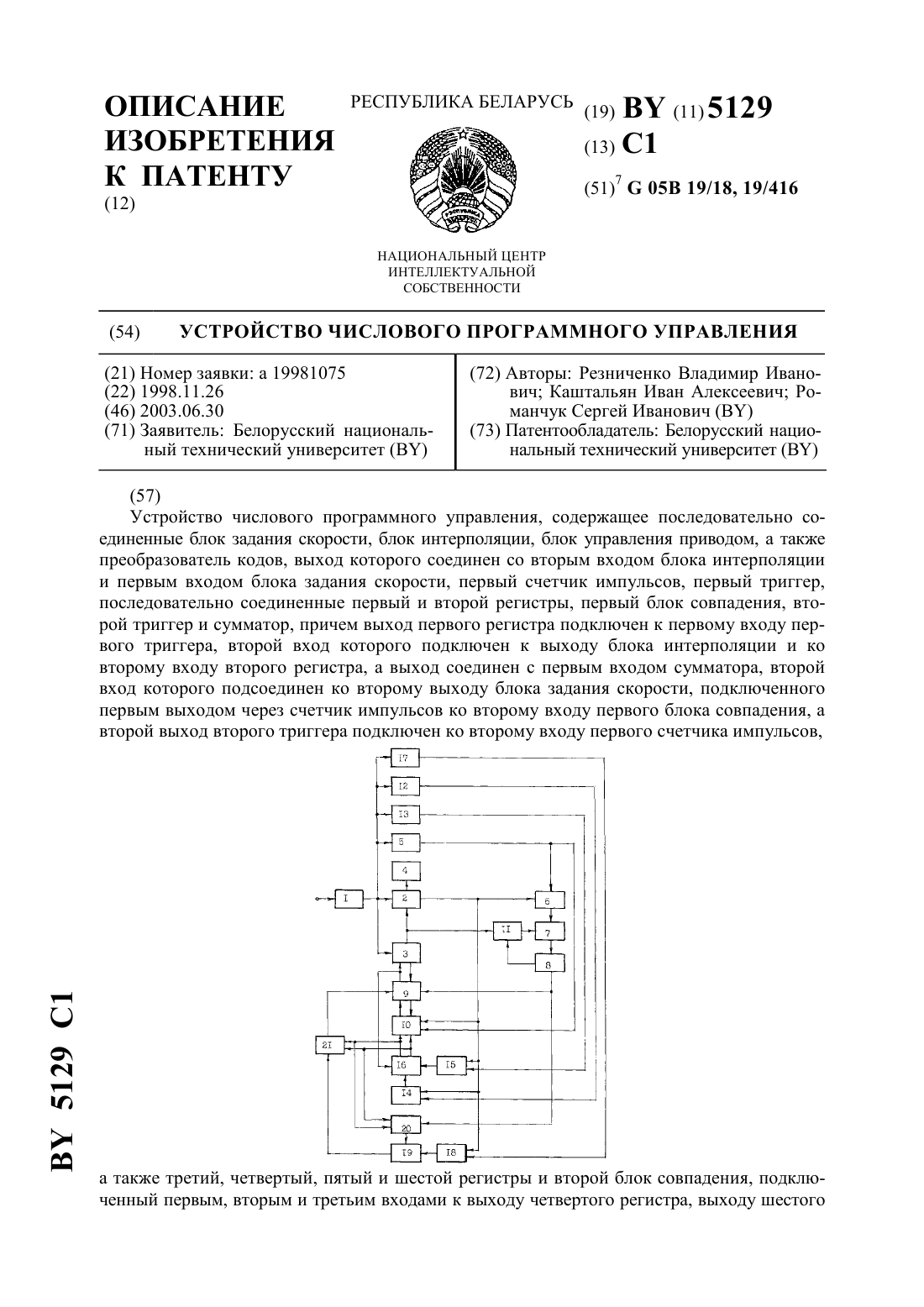
Номер патента: 5129
Опубликовано: 30.06.2003
Авторы: Резниченко Владимир Иванович, Романчук Сергей Иванович, Каштальян Иван Алексеевич
МПК: G05B 19/18, G05B 19/416
Метки: устройство, управления, программного, числового
Текст:
...совпадения соответственно, а также с первым и вторым входами второго счетчика, подключенного третьим входом к первому выходу второго триггера, а выход третьего триггера подключен к четвертому входу сумматора, причем первый вход восьмого регистра связан с выходом блока интерполяции, а второй вход с выходом седьмого регистра, соединенного входом с выходом преобразователя кодов. На чертеже представлена блок-схема устройства. Устройство...
Предыдущий патент: Свая
Следующий патент: Заготовка бутылки и венчик горловой части заготовки
Случайный патент: Пространственный арматурный каркас