Векторный асинхронный электропривод
Номер патента: 4373
Опубликовано: 30.03.2002
Авторы: Логвин Владимир Васильевич, Луковников Вадим Иванович
Текст
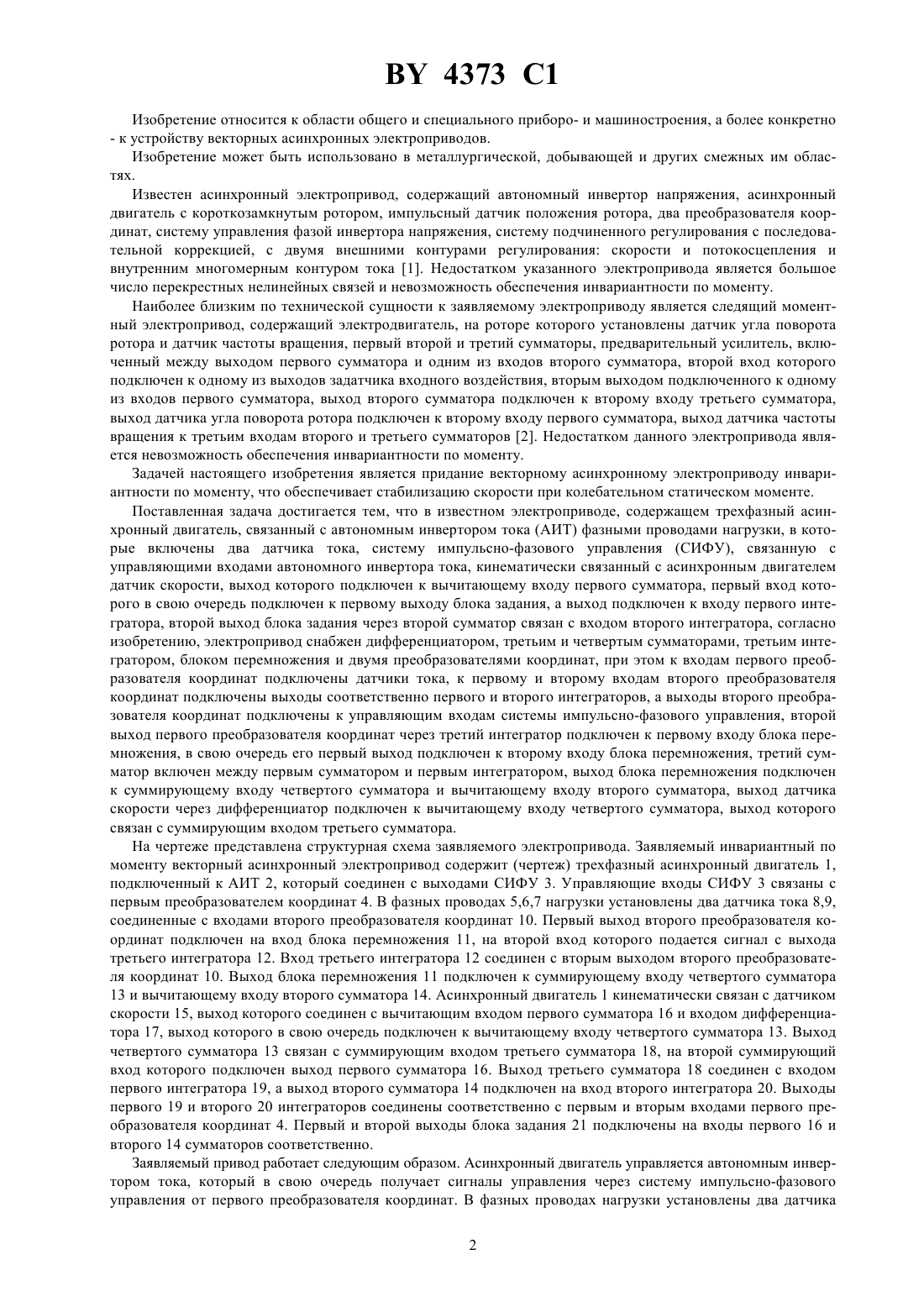
(71) Заявитель Гомельский государственный технический университет им. П.О. Сухого(73) Патентообладатель Гомельский государственный технический университет им. П.О. Сухого(57) Заявляемый векторный асинхронный электропривод относится к области общего и специального приборо- и машиностроения. Изобретение может быть использовано в металлургической, добывающей и других смежных областях. Задачей изобретения является придание векторному асинхронному электроприводу инвариантности по моменту, что обеспечивает стабилизацию скорости при колебательном статическом моменте. Привод содержит трехфазный асинхронный двигатель, автономный инвертор тока, систему импульсно-фазового управления, датчик скорости, два преобразователя координат и систему управления. Реализация поставленной задачи достигается тем, что в результате приведения структуры управления асинхронным двигателем к структуре управления двигателем постоянного тока, в схему встраивается положительная обратная связь по статическому моменту, полученную путем вычитания из полного момента его динамической составляющей. Таким образом, заявляемый векторный асинхронный электропривод по сравнению с известным позволяет реализовать инвариантность по моменту, что в свою очередь приводит к стабилизации скорости двигателя при колебательном статическом моменте на валу двигателя.- к устройству векторных асинхронных электроприводов. Изобретение может быть использовано в металлургической, добывающей и других смежных им областях. Известен асинхронный электропривод, содержащий автономный инвертор напряжения, асинхронный двигатель с короткозамкнутым ротором, импульсный датчик положения ротора, два преобразователя координат, систему управления фазой инвертора напряжения, систему подчиненного регулирования с последовательной коррекцией, с двумя внешними контурами регулирования скорости и потокосцепления и внутренним многомерным контуром тока 1. Недостатком указанного электропривода является большое число перекрестных нелинейных связей и невозможность обеспечения инвариантности по моменту. Наиболее близким по технической сущности к заявляемому электроприводу является следящий моментный электропривод, содержащий электродвигатель, на роторе которого установлены датчик угла поворота ротора и датчик частоты вращения, первый второй и третий сумматоры, предварительный усилитель, включенный между выходом первого сумматора и одним из входов второго сумматора, второй вход которого подключен к одному из выходов задатчика входного воздействия, вторым выходом подключенного к одному из входов первого сумматора, выход второго сумматора подключен к второму входу третьего сумматора,выход датчика угла поворота ротора подключен к второму входу первого сумматора, выход датчика частоты вращения к третьим входам второго и третьего сумматоров 2. Недостатком данного электропривода является невозможность обеспечения инвариантности по моменту. Задачей настоящего изобретения является придание векторному асинхронному электроприводу инвариантности по моменту, что обеспечивает стабилизацию скорости при колебательном статическом моменте. Поставленная задача достигается тем, что в известном электроприводе, содержащем трехфазный асинхронный двигатель, связанный с автономным инвертором тока (АИТ) фазными проводами нагрузки, в которые включены два датчика тока, систему импульсно-фазового управления (СИФУ), связанную с управляющими входами автономного инвертора тока, кинематически связанный с асинхронным двигателем датчик скорости, выход которого подключен к вычитающему входу первого сумматора, первый вход которого в свою очередь подключен к первому выходу блока задания, а выход подключен к входу первого интегратора, второй выход блока задания через второй сумматор связан с входом второго интегратора, согласно изобретению, электропривод снабжен дифференциатором, третьим и четвертым сумматорами, третьим интегратором, блоком перемножения и двумя преобразователями координат, при этом к входам первого преобразователя координат подключены датчики тока, к первому и второму входам второго преобразователя координат подключены выходы соответственно первого и второго интеграторов, а выходы второго преобразователя координат подключены к управляющим входам системы импульсно-фазового управления, второй выход первого преобразователя координат через третий интегратор подключен к первому входу блока перемножения, в свою очередь его первый выход подключен к второму входу блока перемножения, третий сумматор включен между первым сумматором и первым интегратором, выход блока перемножения подключен к суммирующему входу четвертого сумматора и вычитающему входу второго сумматора, выход датчика скорости через дифференциатор подключен к вычитающему входу четвертого сумматора, выход которого связан с суммирующим входом третьего сумматора. На чертеже представлена структурная схема заявляемого электропривода. Заявляемый инвариантный по моменту векторный асинхронный электропривод содержит (чертеж) трехфазный асинхронный двигатель 1,подключенный к АИТ 2, который соединен с выходами СИФУ 3. Управляющие входы СИФУ 3 связаны с первым преобразователем координат 4. В фазных проводах 5,6,7 нагрузки установлены два датчика тока 8,9,соединенные с входами второго преобразователя координат 10. Первый выход второго преобразователя координат подключен на вход блока перемножения 11, на второй вход которого подается сигнал с выхода третьего интегратора 12. Вход третьего интегратора 12 соединен с вторым выходом второго преобразователя координат 10. Выход блока перемножения 11 подключен к суммирующему входу четвертого сумматора 13 и вычитающему входу второго сумматора 14. Асинхронный двигатель 1 кинематически связан с датчиком скорости 15, выход которого соединен с вычитающим входом первого сумматора 16 и входом дифференциатора 17, выход которого в свою очередь подключен к вычитающему входу четвертого сумматора 13. Выход четвертого сумматора 13 связан с суммирующим входом третьего сумматора 18, на второй суммирующий вход которого подключен выход первого сумматора 16. Выход третьего сумматора 18 соединен с входом первого интегратора 19, а выход второго сумматора 14 подключен на вход второго интегратора 20. Выходы первого 19 и второго 20 интеграторов соединены соответственно с первым и вторым входами первого преобразователя координат 4. Первый и второй выходы блока задания 21 подключены на входы первого 16 и второго 14 сумматоров соответственно. Заявляемый привод работает следующим образом. Асинхронный двигатель управляется автономным инвертором тока, который в свою очередь получает сигналы управления через систему импульсно-фазового управления от первого преобразователя координат. В фазных проводах нагрузки установлены два датчика 2 4373 1 тока, от которых получает сигналы управления второй преобразователь координат. Первый и второй преобразователи координат осуществляют взаимосвязь системы управления и силовой части. Второй преобразователь координат осуществляет преобразование сигналов реальных токов к двухфазной системе координат,ориентированной по вектору потокосцепления ротора, а первый преобразователь координат осуществляет преобразование от двухфазной модели к реальной системе токов. Блок задания выдает два сигнала первый сигнал задания скорости, поступающий на первый сумматор, второй сигнал задания потокосцепления ротора, поступающий на второй сумматор. Для обеспечения стабильности скорости и потокосцепления в схему введены обратные отрицательные связи, т.е. на вычитающий вход первого сумматора подан сигнал с датчика скорости, а на вычитающий вход второго сумматора подан сигнал потокосцепления ротора, полученный на выходе блока перемножения, на первый вход которого через третий интегратор поступает реактивная составляющая тока, а на второй вход поступает активная составляющая тока, которые получены на выходах первого преобразователя координат. С целью обеспечения инвариантности по моменту в схему введена положительная обратная связь по моменту сигнал от датчика скорости через дифференциатор поступает на вычитающий вход четвертого сумматора, на суммирующий вход которого подан сигнал с выхода блока перемножения. Результирующий сигнал с четвертого сумматора поступает на суммирующий вход третьего сумматора, который включен между выходом первого сумматора и первым интегратором. Сигнал с выхода второго сумматора через второй интегратор поступает на вход первого преобразователя координат и является сигналом управления потокосцеплением ротора. Сигнал с выхода первого интегратора также поступает на вход первого преобразователя координат и является сигналом управления скорости двигателя. Таким образом, заявляемый векторный асинхронный электропривод по сравнению с известным позволяет реализовать инвариантность по моменту, что в свою очередь приводит к стабилизации скорости при колебательном статическом моменте нагрузки к демпфированию статорных токов при набросах нагрузки. Источники информации 1. Бирюков А.В., Богаченко Д.Д., Вайнтруб О.Ш., Гусяцкий Ю.М., Жуков С.В., Чернович М.Н. Микропроцессорное управление электроприводами переменного тока // Электротехника, 1990. -1. - С. 36-39. 2. А.с. СССР 1815787, 1993. Векторный асинхронный электропривод, содержащий трехфазный асинхронный двигатель, связанный с автономным инвертором тока фазными проводами нагрузки, включенные в фазные провода нагрузки два датчика тока, систему импульсно-фазового управления, связанную с управляющими входами автономного инвертора тока, кинематически связанный с асинхронным двигателем датчик скорости, выход которого подключен к вычитающему входу первого сумматора, первый вход которого в свою очередь подключен к первому выходу блока задания, а выход подключен к входу первого интегратора, при этом второй выход блока задания через второй сумматор связан с входом второго интегратора, отличающийся тем, что электропривод снабжен дифференциатором, третьим и четвертым сумматорами, третьим интегратором, блоком перемножения и двумя преобразователями координат, при этом к входам первого преобразователя координат подключены датчики тока, к первому и второму входам второго преобразователя координат подключены выходы соответственно первого и второго интеграторов, а выходы второго преобразователя координат подключены к управляющим входам системы импульсно-фазового управления, второй выход первого преобразователя координат через третий интегратор подключен к первому входу блока перемножения, в свою очередь его первый выход подключен к второму входу блока перемножения, третий сумматор включен между первым сумматором и первым интегратором, выход блока перемножения подключен к суммирующему входу четвертого сумматора и вычитающему входу второго сумматора, выход датчика скорости через дифференциатор подключен к вычитающему входу четвертого сумматора, выход которого связан с суммирующим входом третьего сумматора. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66. 3
МПК / Метки
Метки: векторный, электропривод, асинхронный
Код ссылки
<a href="https://by.patents.su/3-4373-vektornyjj-asinhronnyjj-elektroprivod.html" rel="bookmark" title="База патентов Беларуси">Векторный асинхронный электропривод</a>
Электропривод переменного тока
Номер патента: 3764
Опубликовано: 30.12.2000
Авторы: Тюшкевич Леонид Михайлович, Павлов Владимир Иванович, Коваль Александр Сергеевич
Метки: переменного, тока, электропривод
Текст:
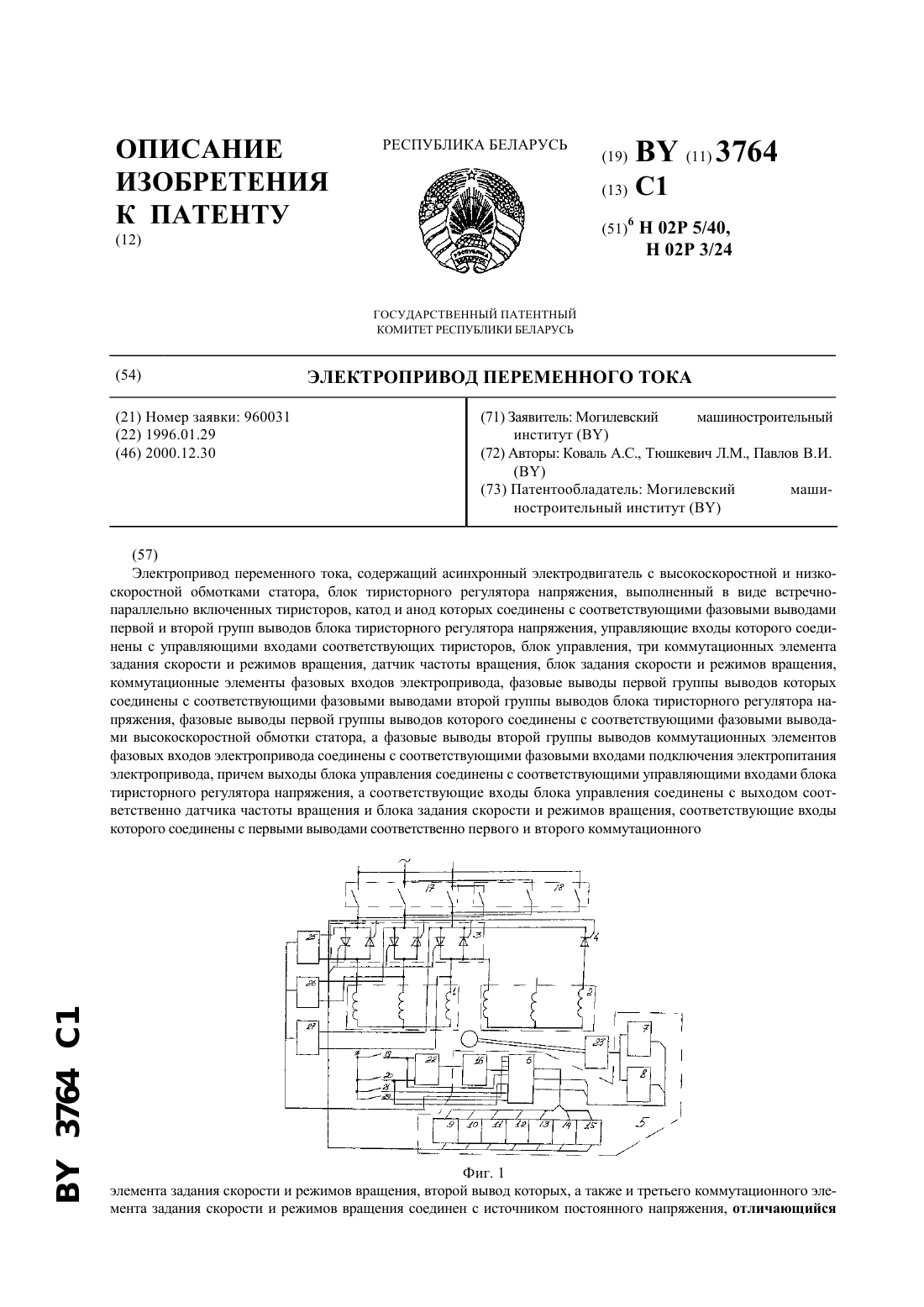
...с соответствующими входами блока управления. Сущность изобретения поясняется чертежами на фиг. 1 приведена схема электропривода переменного тока на фиг. 2 - диаграммы, поясняющие его работу. Электропривод переменного тока содержит асинхронный двигатель с высокоскоростной обмоткой 1 и низкоскоростной обмоткой 2 статора блок тиристорного регулятора напряжения 3, выполненный в виде встречнопараллельно включенных тиристоров, катод и анод...
Двухканальный цифровой осциллограф
Номер патента: 1063
Опубликовано: 14.03.1996
Авторы: Синькевич Валентин Михайлович, Лисенков Борис Николаевич, Немировский Владимир Моисеевич
МПК: G01R 13/20
Метки: двухканальный, осциллограф, цифровой
Текст:
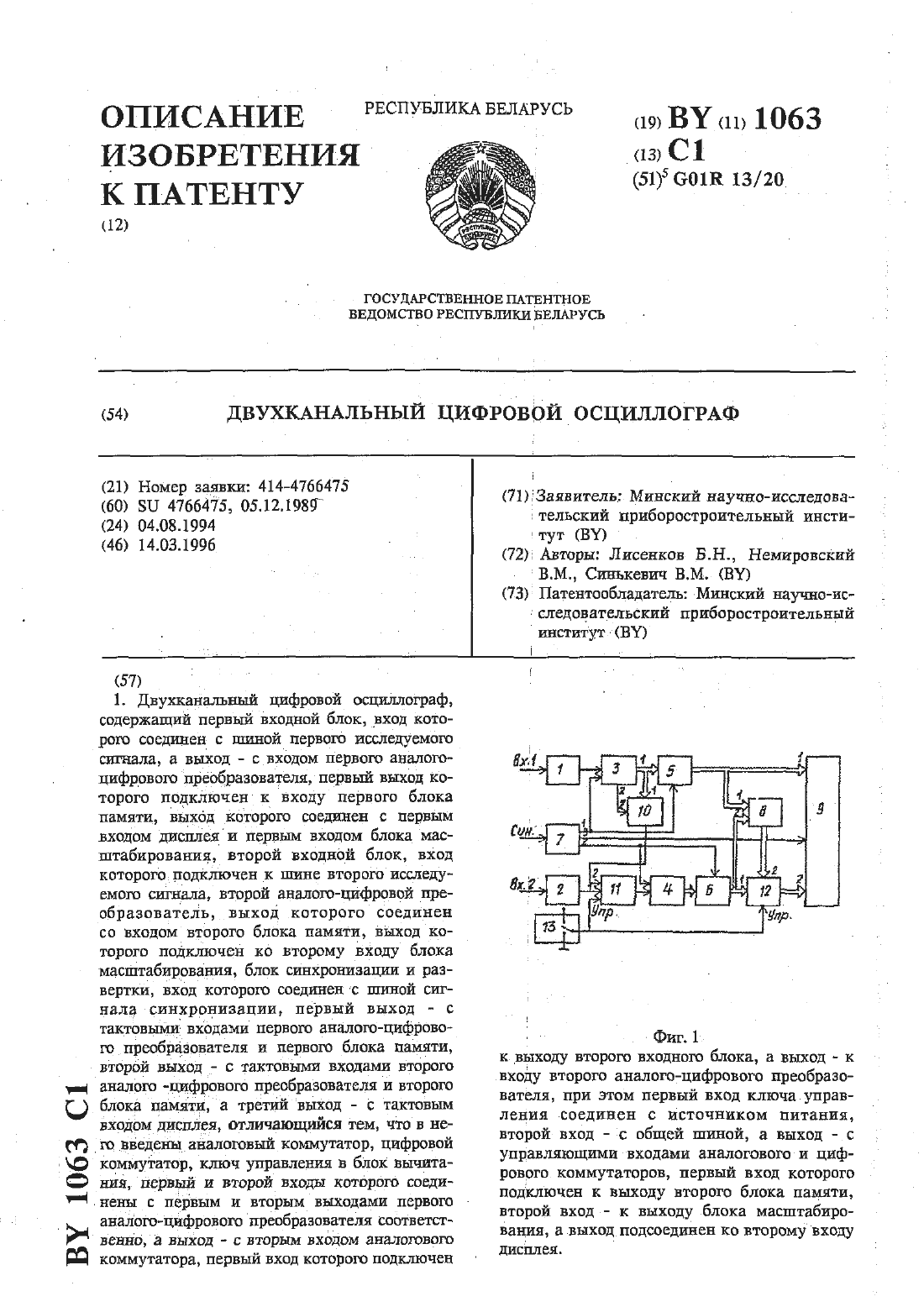
...и 12, подключается выход блока 2 входного ко входу преобразователя 4, а выход блока 6 памяти - ко второму входу дисплея 9. В одноканальном режиме аналоювый коммутатор 11 отключает блок 2 входной и соединяет вход преобразователя 4 с выходом блока 10 вычитания, а цифровой коммутатор 12 кодов соединяет выход блока 8 масштабирования со вторым входом дисплея 9.В одноканальвом режиме работы цифровою осциллографа входной сигнал поступает на первый...
Устройство управления буферной памятью
Номер патента: 1191
Опубликовано: 14.06.1996
Авторы: Зайцев Александр Иванович, Фельдман Владимир Марткович, Пентковский Владимир Мстиславович, Коваленко Сергей Саввич
МПК: G06F 12/08
Метки: памятью, буферной, устройство, управления
Текст:
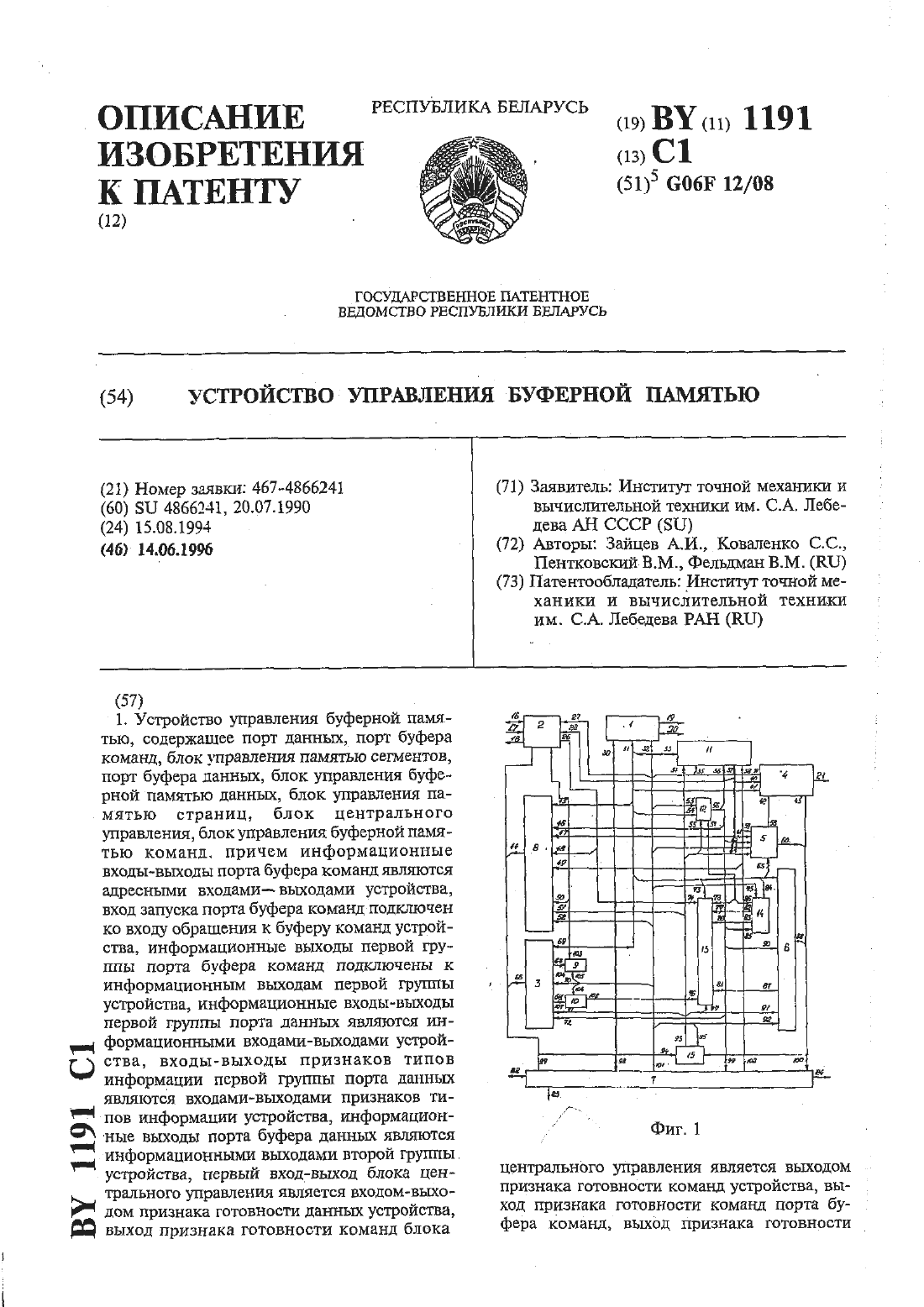
...второго мультиплексора адреса подключены к адресным входам второй группы соответственно первого, второго, третьего и четвертого узлов памяти адресных признаков и адресному входу второго мультиплексора данных, выход формирователя признаков значимости подключен к адресным входам третьейгруппы первого, второго, третьего и четвертого узлов памяти адресных признаков, выход мультигшексора данных признаков старения соединен с информационным входом...
Сумматор унитарных кодов по модулю три
Номер патента: 2473
Опубликовано: 30.12.1998
Авторы: Супрун Валерий Павлович, Седун Андрей Максимович
МПК: G06F 7/49
Метки: унитарных, сумматор, модулю, кодов, три
Текст:
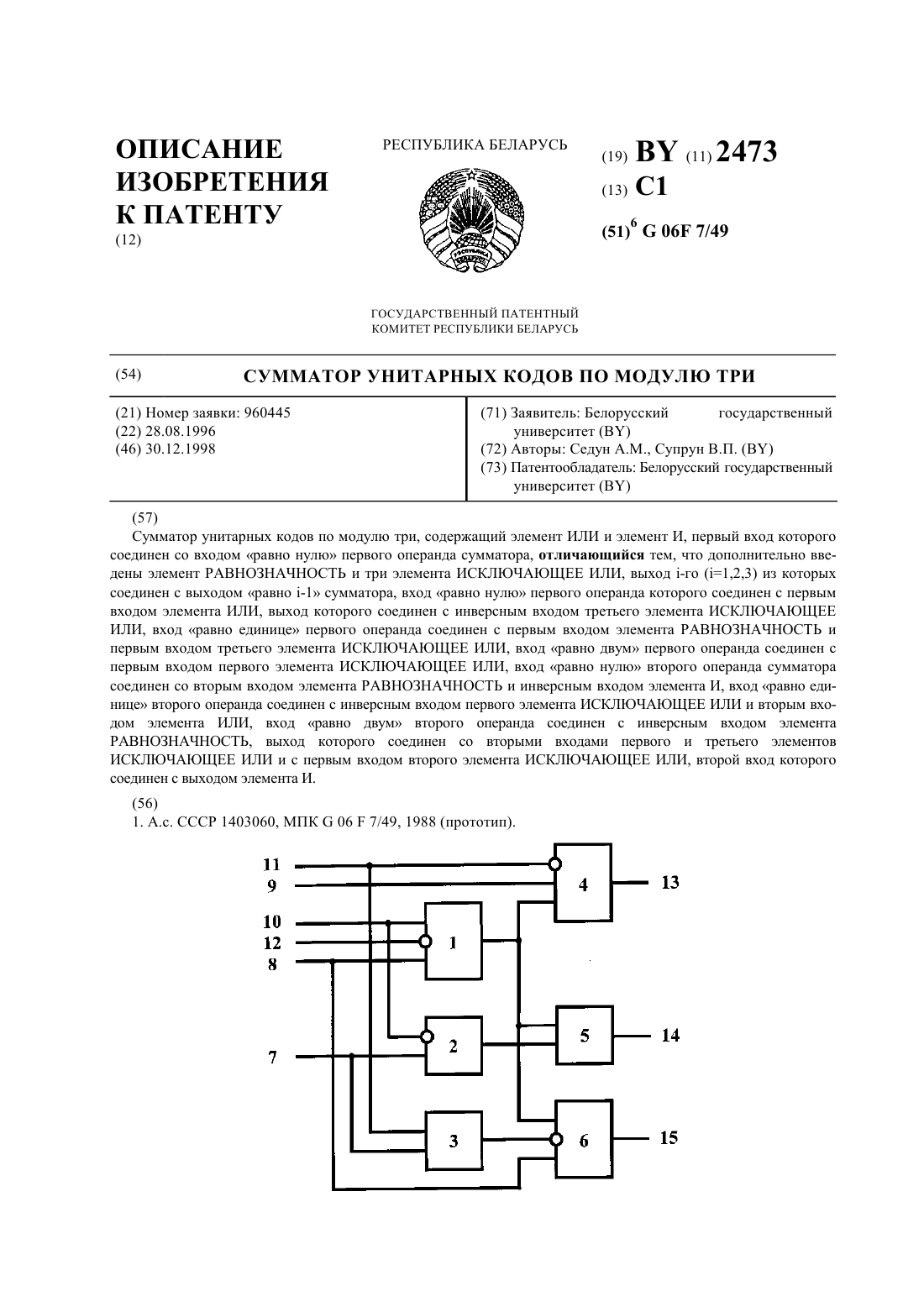
...элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход - го (1,2,3) из которых соединен с выходом равно -1 сумматора. Вход равно нулю первого операнда сумматора соединен с первым входом элемента ИЛИ, выход которого соединен с инверсным входом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Вход равно единице первого операнда соединен с первым входом элемента РАВНОЗНАЧНОСТЬ и первым входом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Вход равно двум первого операнда соединен с первым...
Сумматор унитарных кодов по модулю три
Номер патента: 2305
Опубликовано: 30.09.1998
Авторы: Супрун Валерий Павлович, Авгуль Леонид Болеславович
МПК: G06F 7/49
Метки: кодов, модулю, три, сумматор, унитарных
Текст:
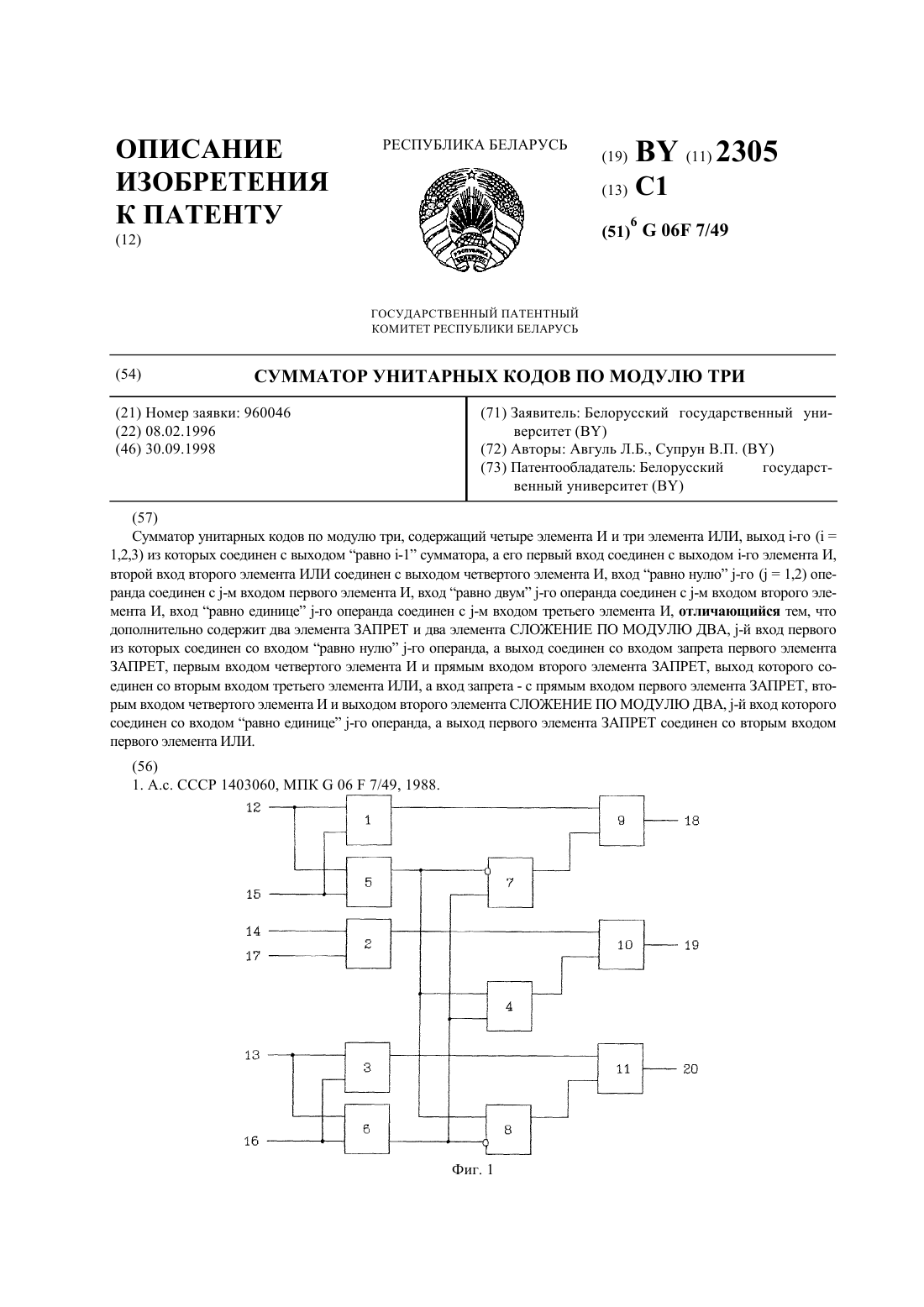
...три содержит четыре элемента И и три элемента ИЛИ. Выход -г (1, 2, 3) элемента ИЛИ соединен с выходом равно -1 сумматора, а его первый вход соединен с выходом -г элемента И. Второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, вход равно нулю-го (1, 2) операнда соединен с -м входом первого элемента И. Вход равно двум -го операнда соединен с -м входом второго элемента И, вход равно единице -го операнда соединен с -м...
Предыдущий патент: Впускной тракт двигателя внутреннего сгорания
Следующий патент: Способ получения обогащенного ильменита
Случайный патент: Сумматор унитарных кодов по модулю три