Маятниковый гравиметр
Текст
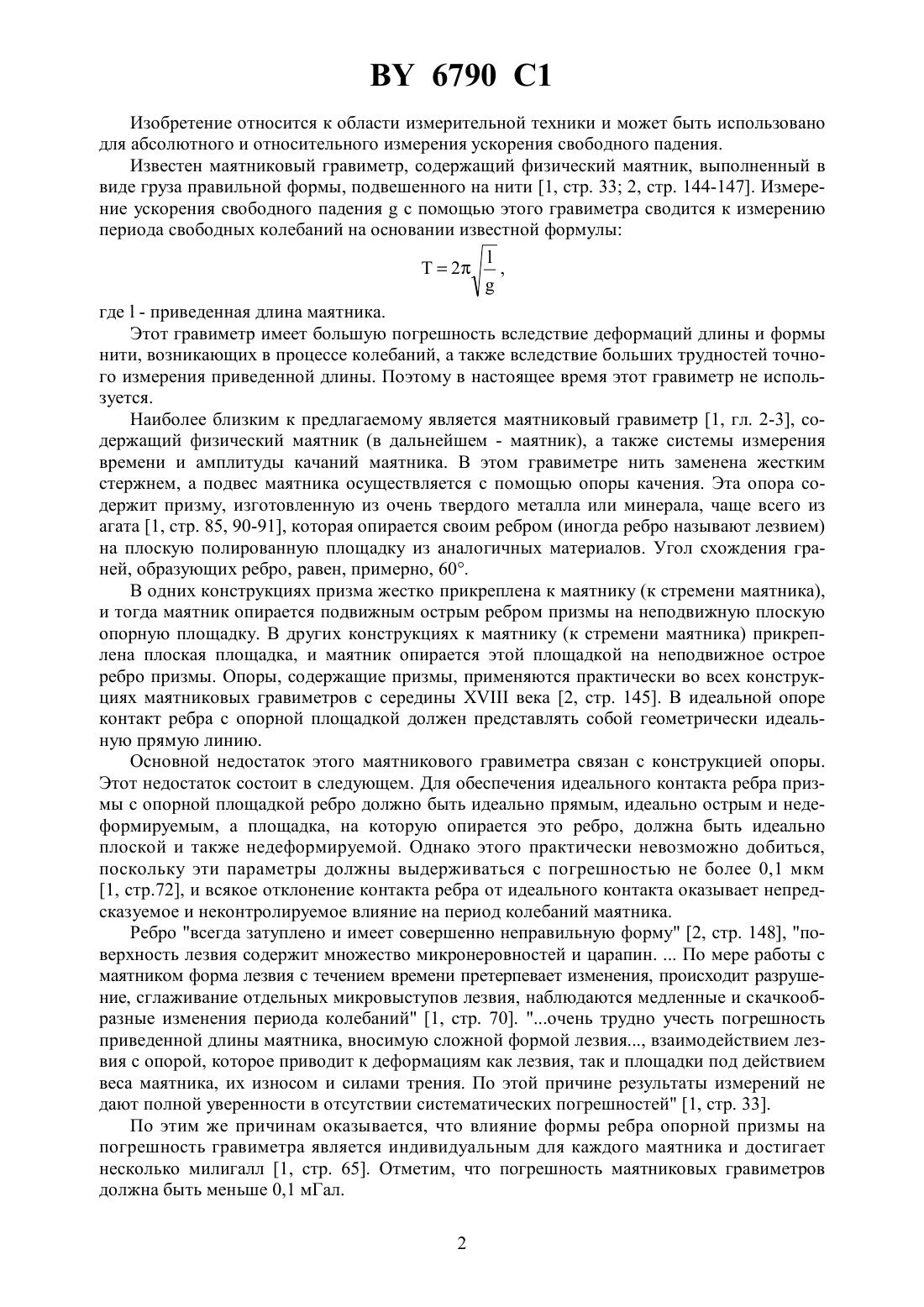
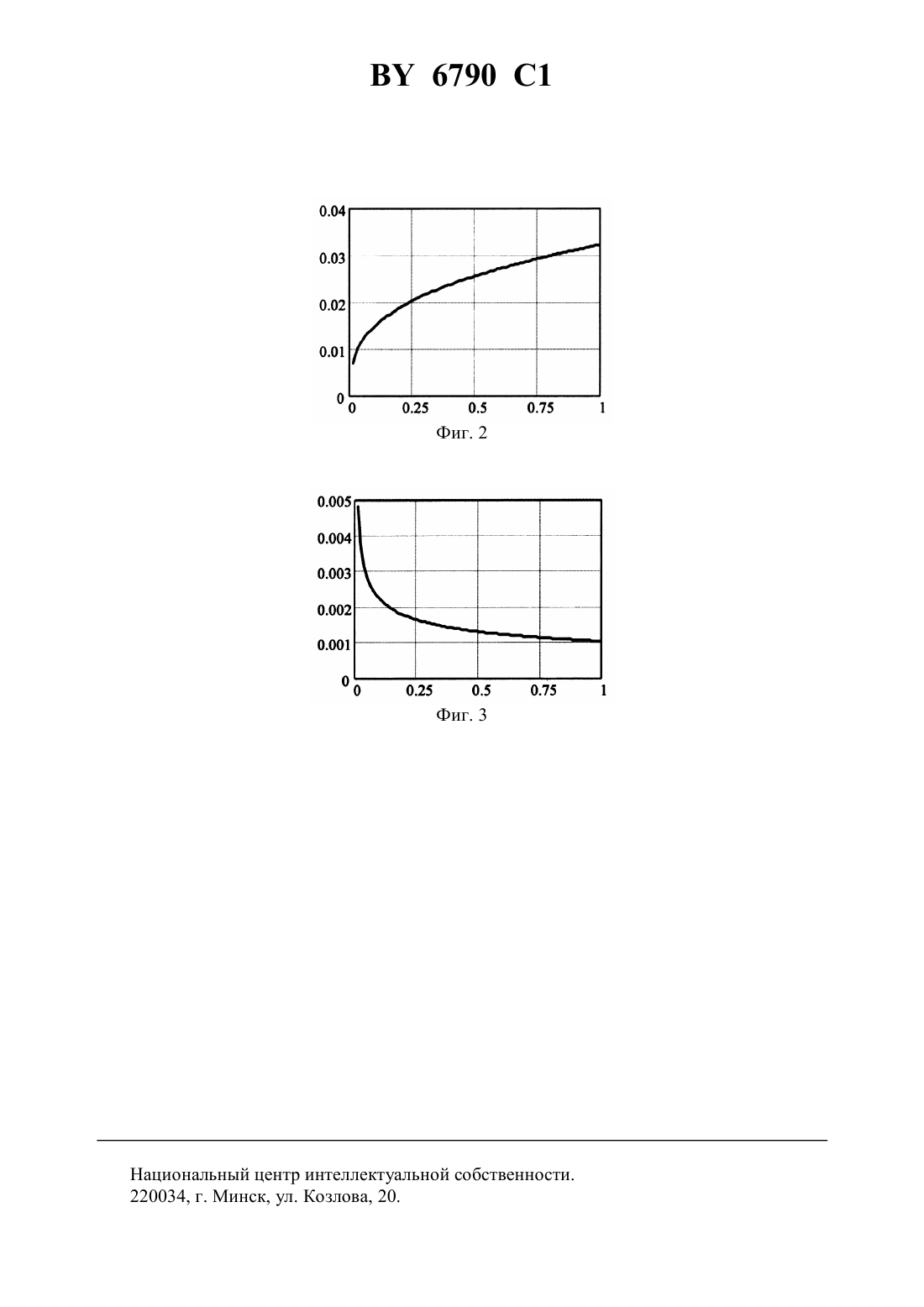
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский национальный технический университет(72) Автор Джилавдари Игорь Захарович(73) Патентообладатель Белорусский национальный технический университет(57) Маятниковый гравиметр, содержащий физический маятник с опорой качения, содержащей подвижную часть в виде поверхности качения и неподвижную часть в виде опорной площадки, измерители периода и амплитуды колебаний физического маятника,отличающийся тем, что поверхность качения выполнена в виде двух сфер, расположенных симметрично относительно прямой, проходящей через центр тяжести физического маятника и перпендикулярной мгновенной оси вращения последнего, причем мгновенная ось вращения физического маятника проходит через точки контактов сфер с опорной площадкой. 6790 1 Изобретение относится к области измерительной техники и может быть использовано для абсолютного и относительного измерения ускорения свободного падения. Известен маятниковый гравиметр, содержащий физический маятник, выполненный в виде груза правильной формы, подвешенного на нити 1, стр. 33 2, стр. 144-147. Измерение ускорения свободного паденияс помощью этого гравиметра сводится к измерению периода свободных колебаний на основании известной формулы, где- приведенная длина маятника. Этот гравиметр имеет большую погрешность вследствие деформаций длины и формы нити, возникающих в процессе колебаний, а также вследствие больших трудностей точного измерения приведенной длины. Поэтому в настоящее время этот гравиметр не используется. Наиболее близким к предлагаемому является маятниковый гравиметр 1, гл. 2-3, содержащий физический маятник (в дальнейшем - маятник), а также системы измерения времени и амплитуды качаний маятника. В этом гравиметре нить заменена жестким стержнем, а подвес маятника осуществляется с помощью опоры качения. Эта опора содержит призму, изготовленную из очень твердого металла или минерала, чаще всего из агата 1, стр. 85, 90-91, которая опирается своим ребром (иногда ребро называют лезвием) на плоскую полированную площадку из аналогичных материалов. Угол схождения граней, образующих ребро, равен, примерно, 60. В одних конструкциях призма жестко прикреплена к маятнику (к стремени маятника),и тогда маятник опирается подвижным острым ребром призмы на неподвижную плоскую опорную площадку. В других конструкциях к маятнику (к стремени маятника) прикреплена плоская площадка, и маятник опирается этой площадкой на неподвижное острое ребро призмы. Опоры, содержащие призмы, применяются практически во всех конструкциях маятниковых гравиметров с серединывека 2, стр. 145. В идеальной опоре контакт ребра с опорной площадкой должен представлять собой геометрически идеальную прямую линию. Основной недостаток этого маятникового гравиметра связан с конструкцией опоры. Этот недостаток состоит в следующем. Для обеспечения идеального контакта ребра призмы с опорной площадкой ребро должно быть идеально прямым, идеально острым и недеформируемым, а площадка, на которую опирается это ребро, должна быть идеально плоской и также недеформируемой. Однако этого практически невозможно добиться,поскольку эти параметры должны выдерживаться с погрешностью не более 0,1 мкм 1, стр.72, и всякое отклонение контакта ребра от идеального контакта оказывает непредсказуемое и неконтролируемое влияние на период колебаний маятника. Ребро всегда затуплено и имеет совершенно неправильную форму 2, стр. 148, поверхность лезвия содержит множество микронеровностей и царапин.По мере работы с маятником форма лезвия с течением времени претерпевает изменения, происходит разрушение, сглаживание отдельных микровыступов лезвия, наблюдаются медленные и скачкообразные изменения периода колебаний 1, стр. 70. очень трудно учесть погрешность приведенной длины маятника, вносимую сложной формой лезвия, взаимодействием лезвия с опорой, которое приводит к деформациям как лезвия, так и площадки под действием веса маятника, их износом и силами трения. По этой причине результаты измерений не дают полной уверенности в отсутствии систематических погрешностей 1, стр. 33. По этим же причинам оказывается, что влияние формы ребра опорной призмы на погрешность гравиметра является индивидуальным для каждого маятника и достигает несколько милигалл 1, стр. 65. Отметим, что погрешность маятниковых гравиметров должна быть меньше 0,1 мГал. 2 6790 1 Кроме того, при данной конструкции опоры каждое опускание маятника на опору приводит к появлению дополнительной погрешности порядка одного милигалла, называемой ошибкой арретирования и обусловленной различным взаимодействием лезвия и площадки, 1, стр. 72. В конечном счете, несмотря на все принимаемые меры, погрешность, вносимая системой лезвие - площадка, существенно превышает погрешность регистрации периода колебаний. Изготовление опоры в виде призмы, ребро которой имеет вид идеальной цилиндрической поверхности малого радиуса, представляет собой очень трудную технологическую задачу. Эта проблема осложняется тем, что длина линии контакта ребра с опорной площадкой (база опоры) должна быть достаточно большой (6080 мм) для того, чтобы уменьшить возможность соскальзывания призмы с опорной площадки. В наиболее точных современных маятниковых гравиметрах типа Агат база ограничена величиной всего 23 мм. Еще одна технологическая проблема - это обеспечение максимально возможной жесткости крепления опорной призмы или площадки к маятнику. Все это приводит к тому, например, что в тех же гравиметрах типа Агат маятники нетехнологичны в изготовлении и не ремонтоспособны вследствие неразборной (сварной) конструкции. Стремя маятника изготавливается из остродефицитного материала (агат) 3, стр. 28. Задачей изобретения является увеличение точности маятникового гравиметра и упрощение конструкции опоры. Решение этой задачи обеспечивается тем, что в маятниковом гравиметре, содержащем физический маятник с опорой качения, содержащей подвижную часть в виде поверхности качения и неподвижную часть в виде опорной площадки, измерители периода и амплитуды колебаний физического маятника, поверхность качения выполнена в виде двух сфер,расположенных симметрично относительно прямой, проходящей через центр тяжести физического маятника и перпендикулярной мгновенной оси вращения последнего, причем мгновенная ось вращения физического маятника проходит через точки контактов сфер с опорной площадкой. На фиг. 1 схематически представлен пример конструкции маятникового гравиметра с опорой, содержащей два шарика, в которой шарики жестко связаны с маятником. Измерители амплитуды и периода колебаний физического маятника не показаны. На фиг. 2 представлен график зависимости радиуса пятна контакта от радиуса стального шарика в случае контакта шарика с плоской стальной поверхностью (все размеры даны в мм) при нагрузке, равной 2,45(что соответствует массе маятника 500 г), обусловленного взаимными деформациями шарика и плоской поверхности. На фиг. 3 представлен график зависимости сближения стального шарика и стальной плоской опорной поверхности от радиуса шарика (все размеры даны в мм) для случая, когда нагрузка равна 2,45 , обусловленного взаимными деформациями шарика и плоской поверхности. Маятниковый гравиметр на фиг. 1 содержит физический маятник 1, опора которого выполнена в виде подвижной части 2, жестко скрепленной с физическим маятником 1, и двух шариков 3 и 4, жестко связанных с подвижной частью 2. Шарики 3 и 4 опираются на плоскую полированную неподвижную площадку 5 - неподвижную часть опоры. Ось 00 ось колебаний физического маятника. Шарики 3 и 4 расположены симметрично относительно перпендикулярак этой оси и проходящего через центр тяжести физического маятника С. Физический маятник колеблется в плоскости, перпендикулярной плоскости рисунка вокруг оси 00. Процесс колебаний физического маятника с данной конструкцией опоры очевиден и не требует пояснений. Замена ребра призмы (т.е. неправильной цилиндрической поверхности) двумя сферами позволяет 3 6790 1 существенно упростить конструкцию опоры. Известно, что изготовить с заданной погрешностью поверхность сферической формы гораздо легче, чем изготовить с той же погрешностью поверхность цилиндрической формы. Сферичность поверхности качения могут обеспечить простые шарики. Современная технология позволяет изготавливать шарики самых различных размеров с весьма высокой точностью формы и чистотой полировки из различных материалов, в том числе из стали и корунда. Шарики могут быть достаточно малыми. Например, диаметр стальных шариков в пишущих узлах некоторых шариковых ручек равен 0,5 мм. Это в свою очередь позволяет достигнуть минимально возможного трения в опоре осуществить максимально жесткое крепление поверхности качения к маятнику, поскольку шарики могут быть закреплены непосредственно на маятнике простым защемлением обеспечить идеальный контакт поверхности качения с плоской опорной площадкой,так как контакт сферической поверхности с плоскостью этот является практически точечным при этом требование к геометрии опорной площадки оказывается минимальным реализовать опорную базу маятника практически любой длины простым выбором расстояния между сферами (шариками), чего невозможно достигнуть в прототипе, и тем самым увеличить устойчивость маятника (фиг. 1) реализовать практически идеальную ось качаний маятника, поскольку через две точки контакта сфер с опорными площадками всегда проходит идеально прямая линия (ось 00 на фиг. 1), чего также невозможно достигнуть в прототипе. Это позволяет устранить влияние индивидуальных неконтролируемых особенностей опоры-прототипа на колебания маятника получить возможность рассчитать деформацию опоры под действием веса маятника, в том числе в процессе колебаний маятника, и учесть влияние этой деформации на период колебаний маятника, поскольку задача деформации сферы под действием внешней силы это одна из задач теории упругости, которая решается строго аналитически (контактная задача Герца 4). В качестве примера на фиг. 2 и фиг. 3 представлены результаты расчетов взаимных деформаций шарика и опорной площадки, выполненных из легированной стали. Нагрузка на шарик соответствует массе маятника, равной 500 г (250 г силы на один шарик). Провести подобные расчеты для опоры-прототипа не удается, ввиду сложности задачи 1, стр. 70. Это позволяет определить систематические погрешности гравиметра,обусловленные этими деформациями, и их устранить. Симметричное расположение сфер относительно центра масс маятника позволяет реализовать равномерное распределение веса маятника на обе сферы. В совокупности все перечисленные особенности предлагаемой конструкции опоры позволяют устранить указанные выше недостатки опоры-прототипа и решить поставленную задачу. Источники информации 1. Юзефович А.П., Огородова Л.В. Гравиметрия. - . Недра, 1980. 2. Геодезия. Справочное руководство / Под общей ред. .Д. Бонч-Бруевича. Т.1. Физическая геодезия / Под ред. И.А. Казанского. - Л.-. ИМКХ, 1949. 3. Разработка маятникового прибора для выполнения гравиметрических работ на шельфе и в мировом океане (заключительный отчет по НИР, гос. г.79040055). - . ЦНИИГАиК, 1979. 4. Работнов Ю.Н. Механика деформируемого твердого тела. - . Наука, 1988. 4 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01V 7/02
Метки: маятниковый, гравиметр
Код ссылки
<a href="https://by.patents.su/5-6790-mayatnikovyjj-gravimetr.html" rel="bookmark" title="База патентов Беларуси">Маятниковый гравиметр</a>
Маятниковый трибометр
Номер патента: 3269
Опубликовано: 30.03.2000
Авторы: Джилавдари Игорь Захарович, Русак Анатолий Александрович
МПК: G01N 19/02
Метки: трибометр, маятниковый
Текст:
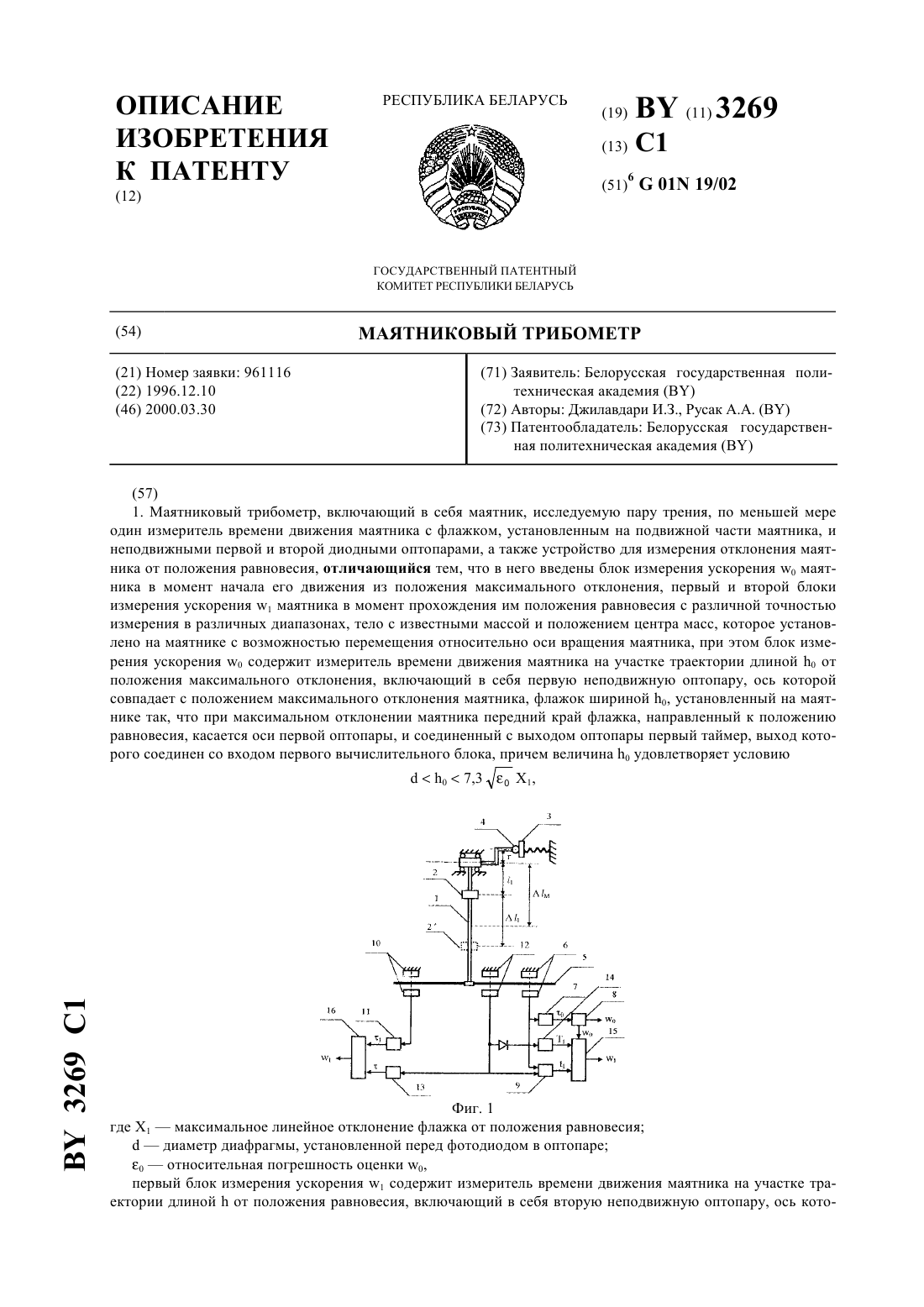
...и вторым входами третьего вычислительного блока, причем величина 2 удовлетворяет условию(6)2,второй блок измерения ускорения 1 содержит также измеритель времени 1 одного полного цикла колебаний, начиная от положения равновесия, включающий в себя указанную выше вторую неподвижную оптопару, флажок шириной 2, установленный на маятнике так, что его передний край, направленный перед началом движения к положению равновесия, в положении...
Устройство для улавливания ленты шахтного конвейера в случае ее обрыва
Номер патента: U 204
Опубликовано: 30.12.2000
Авторы: Шаповалов Валерий Иванович, Островский Валентин Вячеславович, Прушак Нина Владимировна, Роговский Анатолий Михайлович, Протасеня Александр Владимирович, Щерба Владимир Яковлевич
МПК: B65G 43/00
Метки: улавливания, шахтного, устройство, случае, обрыва, ленты, конвейера
Текст:
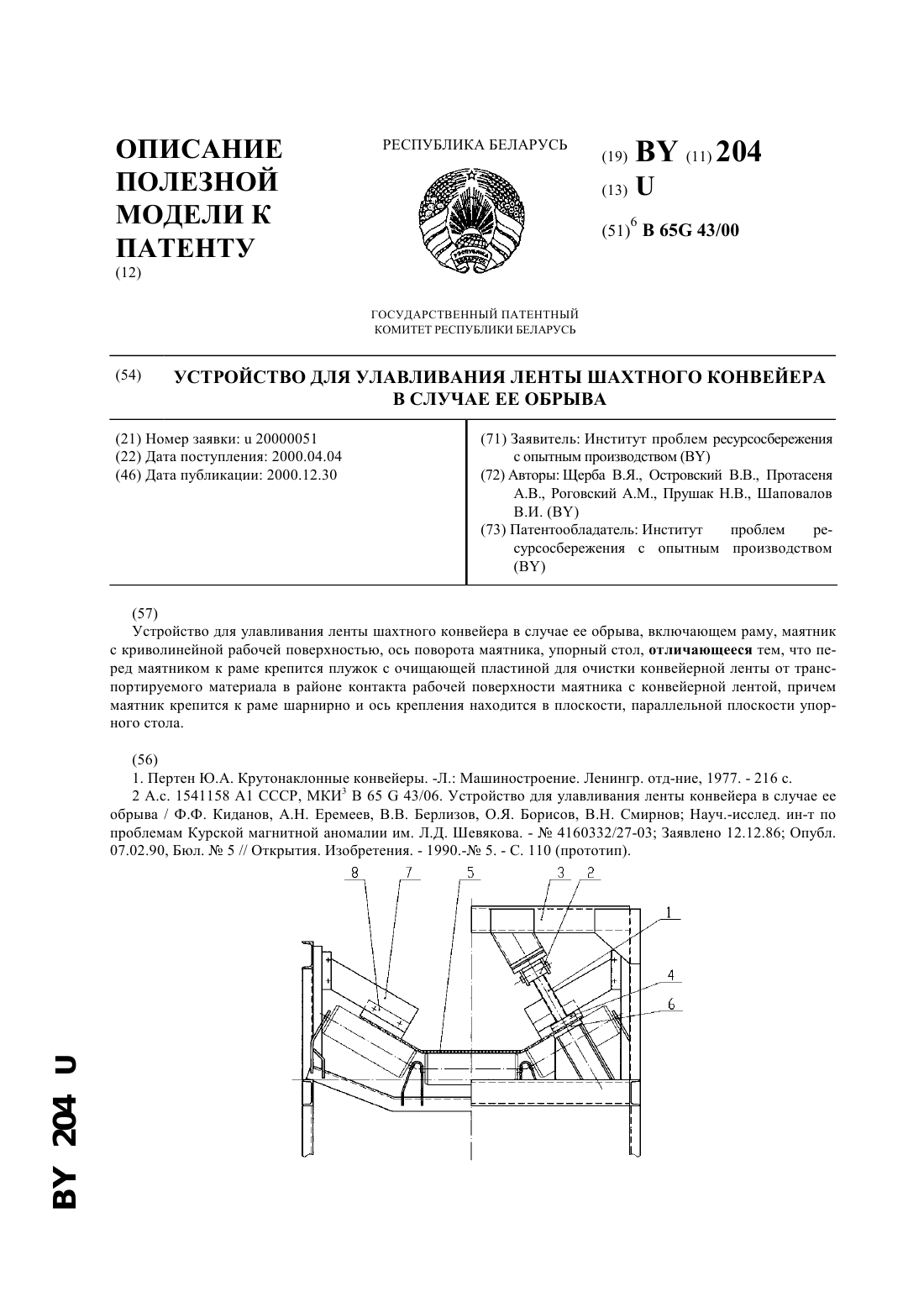
...задачей полезной модели является повышение надежности улавливания конвейерной ленты в случае ее обрыва. Поставленная задача достигается тем, что в устройстве для улавливания ленты шахтного конвейера в случае ее обрыва, включающем раму, маятник с криволинейной рабочей поверхностью, ось поворота маятника, упорный стол, перед маятником к раме дополнительно крепится плужок с очищающей пластиной для очистки конвейерной ленты от...
Автоколебательный электропривод
Номер патента: 4958
Опубликовано: 30.03.2003
Авторы: Луковников Вадим Иванович, Тодарев Валентин Васильевич, Веппер Леонид Владимирович
МПК: H02P 7/62
Метки: электропривод, автоколебательный
Текст:
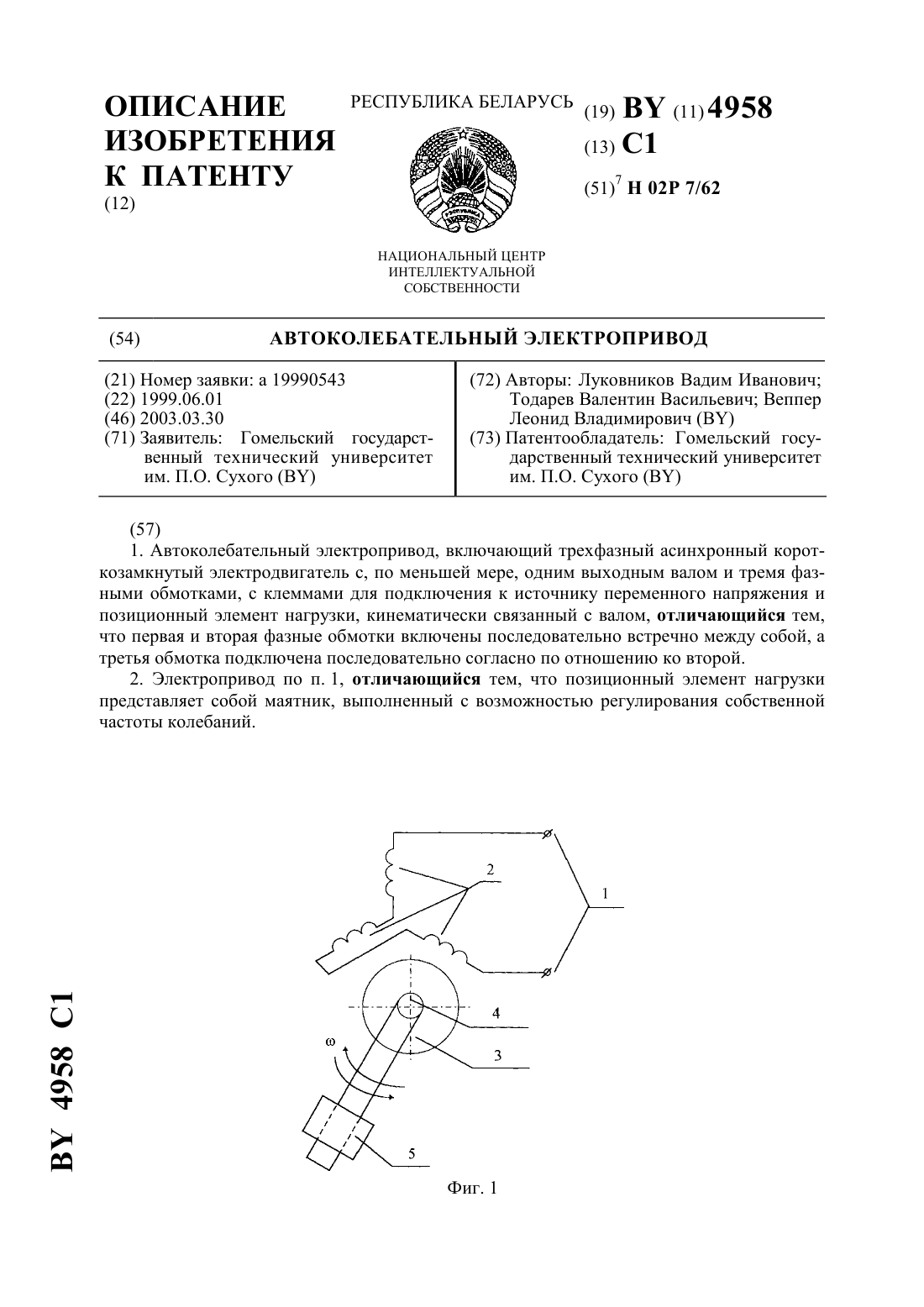
...2 4958 1 Благодаря использованию трех фазных обмоток, из которых первая и вторая включены последовательно встречно между собой, а третья - последовательно согласно по отношению ко второй, достигается увеличение относительной суммарной магнитодвижущей силы(далее по тексту - МДС). Благодаря использованию маятника в качестве позиционного элемента нагрузки (вместо пружины) достигается увеличение амплитуды колебаний, а изменяя длину и вес маятника...
Опора качения с вертикальным валом
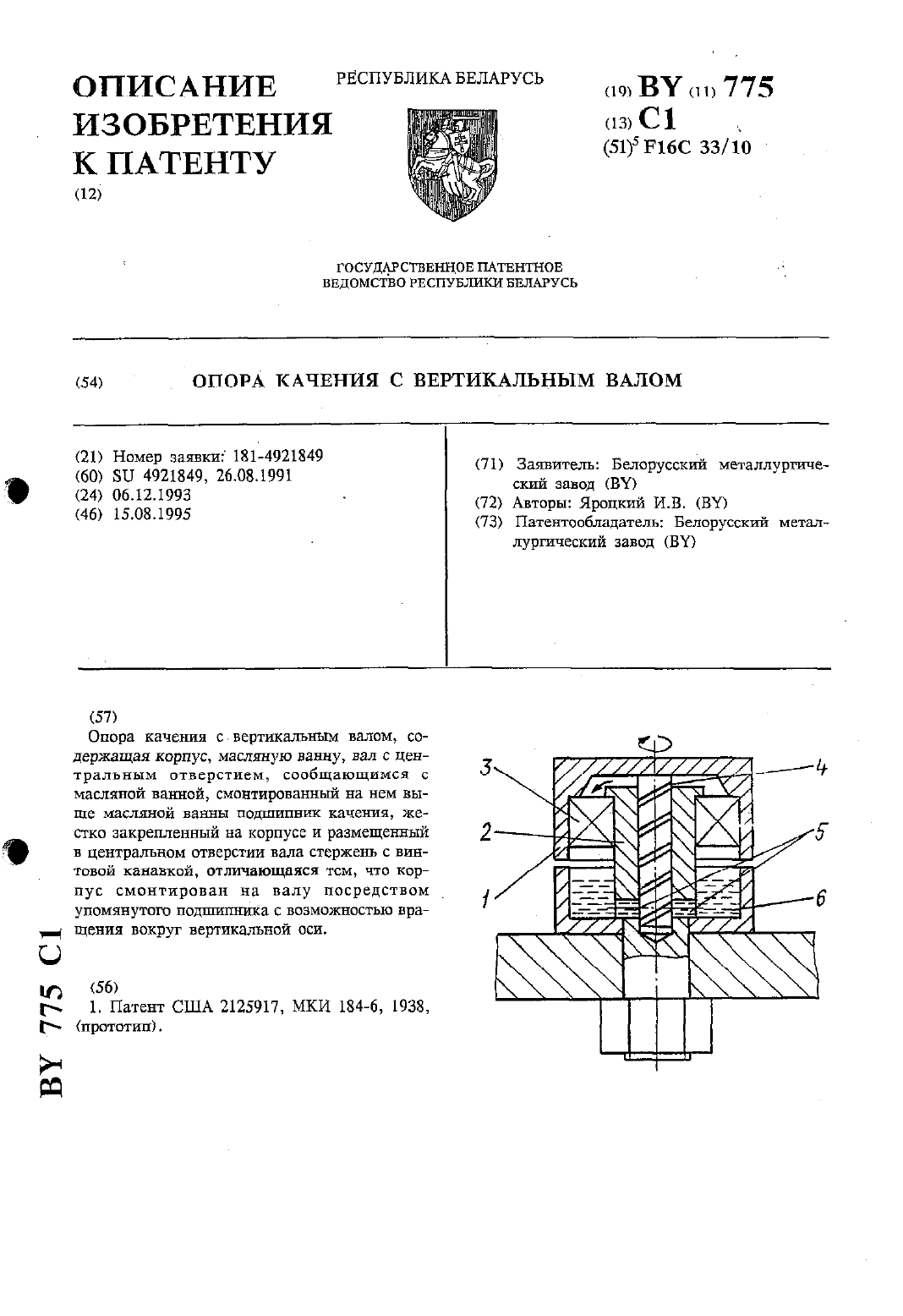
Номер патента: 775
Опубликовано: 15.08.1995
Автор: Яроцкий И. В.
МПК: F16C 33/10
Метки: качения, опора, вертикальным, валом
Текст:
...корпус, смонтированный на валу с помощью подшипников качения и закрытый 2-мя крышками глухой и с проходным отверстием.Недостатком данной конструкции является вытекание смазки из корпуса опоры через упЛОГЦСНИЫ, ЧТО бЗ СС РСГУДШРЦОГО ПОПОЛНЕНИЯ приводит к выходу из строя подшипников опорЫ.В качестве прототипа выбрана конструкция опоры качения с вертикальным валом, содержащая неподвижный корпус, в котором с поМОЩЬЮ ПОДШИПНИК КЗЧЕНИЯ...
Инерционный динамический вариатор крутящих воздействий
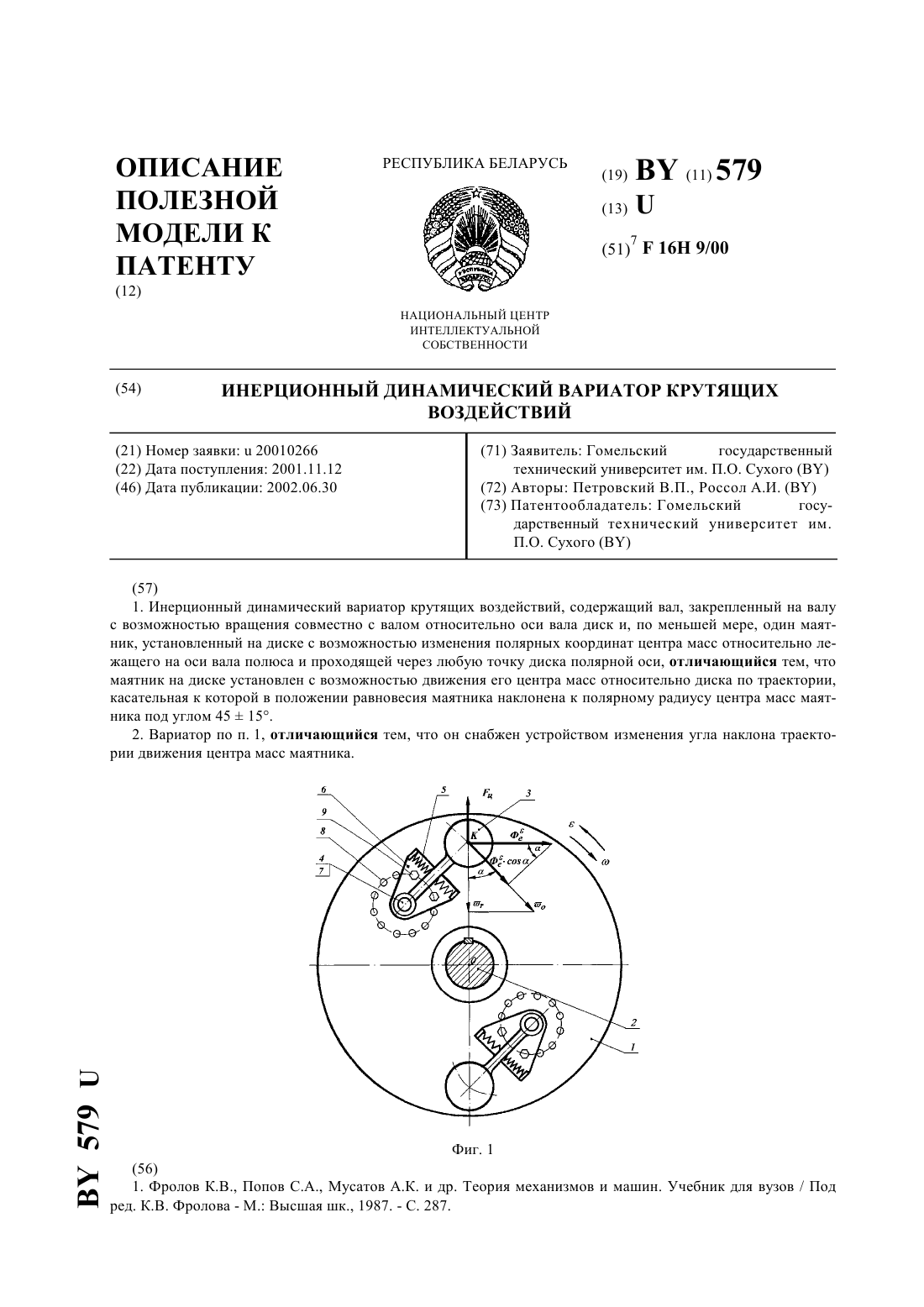
Номер патента: U 579
Опубликовано: 30.06.2002
Авторы: Россол Александр Иванович, Петровский Валентин Петрович
МПК: F16H 9/00
Метки: инерционный, динамический, вариатор, крутящих, воздействий
Текст:
...испытательных стендов, наибольшая эффективность реагирования определяется задаваемым режимом испытания, который во многих случаях является переменным, поэтому в этом случае для достижения наибольшей эффективности реагирования вариатор снабжен устройством изменения угла наклона траектории движения маятника. На фиг. 1 изображен пример выполнения инерционного динамического вариатора крутящих воздействий с маятником качающегося типа....
Предыдущий патент: Доильный стакан
Следующий патент: Инструмент для обработки шариков
Случайный патент: Устройство для образования звездообразных скважин под набивные сваи