Адаптивная система управления станком
Номер патента: 6148
Опубликовано: 30.06.2004
Авторы: Каштальян Иван Алексеевич, Цыркунов Михаил Кондратович
Текст
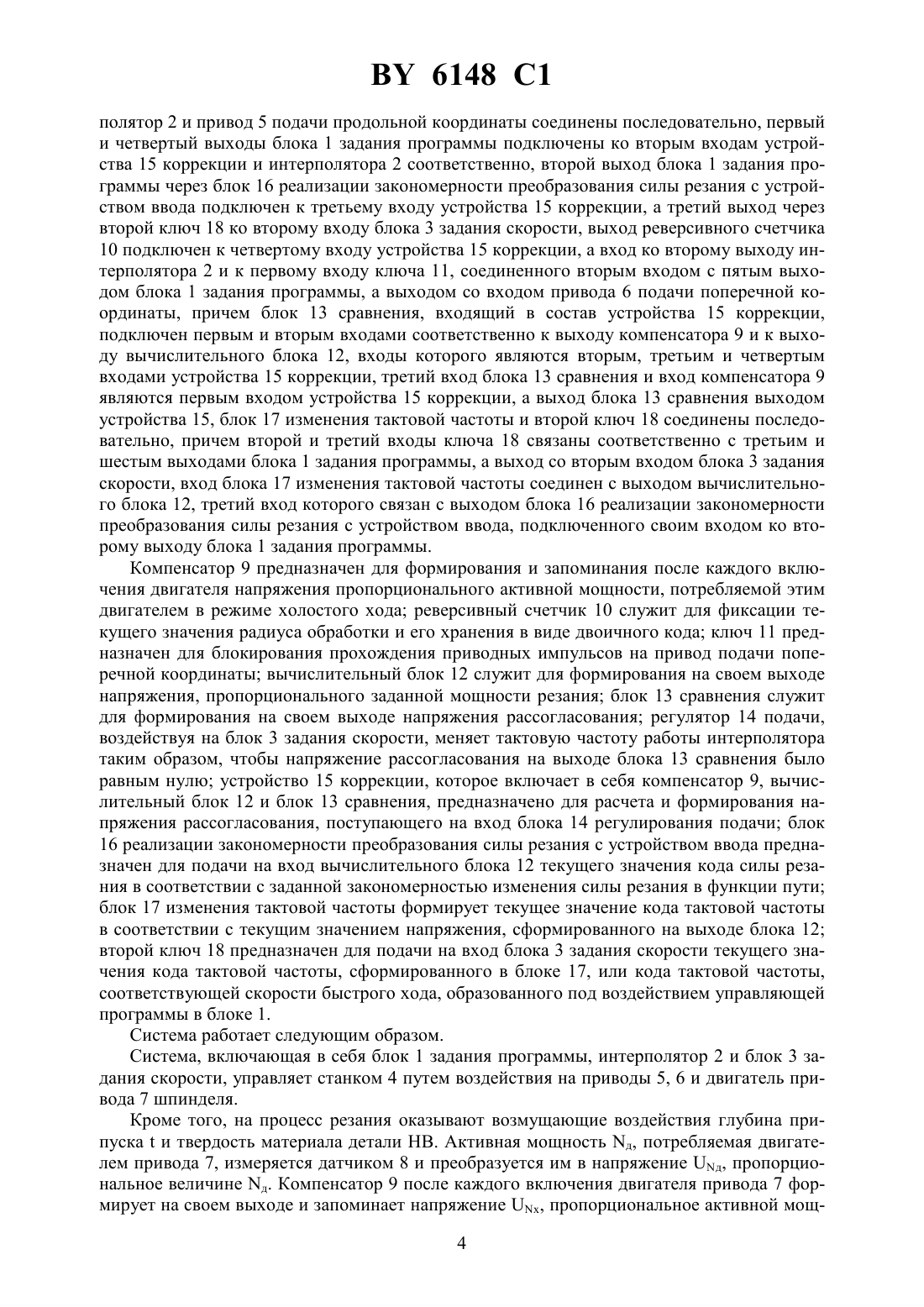
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ СТАНКОМ(71) Заявитель Белорусский национальный технический университет(72) Авторы Каштальян Иван Алексеевич Цыркунов Михаил Кондратович(73) Патентообладатель Белорусский национальный технический университет(57) Адаптивная система управления станком, содержащая привод подачи продольной координаты, привод подачи поперечной координаты, привод шпинделя, блок задания программы, датчик мощности, устройство коррекциикомпенсатором, блоком сравнения и вычислительным блоком регулятор подачи, блок задания скорости, интерполятор, а также ключ и реверсивный счетчик, при этом блок сравнения первым и вторым входами соединен с выходами компенсатора и вычислительного блока соответственно, третий вход блока сравнения и вход компенсатора являются первым входом устройства коррекции, вторым, третьим и четвертым входами которого являются соответствующие входы вычислительного блока, а выходом устройства коррекции является выход блока сравнения, интерполятор первым входом соединен с выходом блока задания скорости, а первым выходом - с приводом подачи продольной координаты, блок задания скорости первым входом соединен с регулятором подачи, вход которого соединен с выходом устройства коррекции, блок задания программы первым выходом соединен со вторым входом устройства 6148 1 коррекции и входом привода шпинделя, а четвертым выходом - со вторым входом интерполятора, датчик мощности входом соединен с выходом привода шпинделя, а выходом - с первым входом устройства коррекции, реверсивный счетчик входом соединен со вторым выходом интерполятора и первым входом ключа, второй вход которого соединен с пятым выходом блока задания программы, а выход - с приводом подачи поперечной координаты,а выходом реверсивный счетчик соединен с четвертым входом устройства коррекции, отличающаяся тем, что содержит блок реализации закономерности преобразования силы резания с устройством ввода, блок изменения тактовой частоты и второй ключ, при этом второй ключ первым входом соединен с выходом блока изменения тактовой частоты, вторым и третьим входами - с соответствующими третьим и шестым выходами блока задания программы, а выходом - со вторым входом блока задания скорости, блок изменения тактовой частоты входом соединен с выходом вычислительного блока, блок реализации закономерности преобразования силы резания с устройством ввода входом соединен со вторым выходом блока задания программы, а выходом - с третьим входом устройства коррекции.(56)744469, 1980.2010293 1, 1994.00077855 1, 1983.00032312 2, 1981.19535869 1, 1997.04450393 , 1984.05838359 , 1998.63059603 , 1988. Изобретение относится к автоматическому управлению и может быть использовано для управления процессом токарной обработки на многоинструментальных станках с числовым программным управлением (ЧПУ). Известна адаптивная система управления токарным станком с ЧПУ, стабилизирующая тангенциальную составляющую силы резания 1. В этой системе в качестве измеряемого параметра выбрана потребляемая двигателем шпинделя активная мощность д, которая связана сизвестной зависимостью.(1) дш ,где- активная мощность, потребляемая двигателем шпинделя в режиме холостого хода ш - скорость вращения шпинделя- радиус обработки, т.е. расстояние от вершины режущей кромки резца до оси вращения заготовки. Система содержит привод подачи поперечной координаты и последовательно соединенные блок задания программы, привод шпинделя, датчик мощности, устройство коррекции,регулятор подачи, блок задания скорости, интерполятор и привод подачи продольной координаты, причем первый и второй выходы блока задания программы подключены ко второму и третьему входам устройства коррекции, а третий и четвертый выходы - ко вторым входам блока задания скорости и интерполятора соответственно. Недостатком известной адаптивной системы является узкая область применения. Прототипом является адаптивная система управления станком 2, содержащая привод подачи поперечной координаты и последовательно соединенные блок задания программы,привод шпинделя, датчик мощности, устройство коррекции, регулятор подачи, блок задания скорости, интерполятор и привод подачи продольной координаты, причем первый и второй выходы блока задания программы подключены ко второму и третьему входам устройства коррекции, а третий и четвертый выходы - ко вторым входам блока задания скорости и интерполятора соответственно, а также ключ и реверсивный счетчик, выход которого подключен к четвертому входу устройства коррекции, а вход - ко второму выходу 2 6148 1 интерполятора и к первому входу ключа, соединенного вторым входом с пятым выходом блока задания программы, а выходом - со входом привода подачи поперечной координаты, а устройство коррекции содержит блок сравнения, подключенный первым и вторым входами соответственно к выходу компенсатора и к выходу вычислительного блока, входы которого являются вторым, третьим и четвертым входами устройства, третий вход блока сравнения и вход компенсатора являются первым входом устройства, а выход блока сравнения - выходом устройства. Недостатком адаптивной системы - прототипа является возможность стабилизации силы резания только на некотором заданном уровне. Этот недостаток не позволяет использовать систему, когда возникает необходимость поддержания текущего значения силы резания, изменяющейся по некоторой заданной закономерности в функции пути. Задачей, решаемой изобретением, является расширение функциональных возможностей системы, позволяющее стабилизировать заранее заданную закономерность изменения силы резания в функции пути, например, при точении нежестких деталей. Поставленная задача достигается тем, что в адаптивную систему управления станком,содержащую привод подачи продольной координаты, привод подачи поперечной координаты, привод шпинделя, блок задания программы, датчик мощности, устройство коррекции с компенсатором, блоком сравнения и вычислительным блоком, регулятор подачи,блок задания скорости, интерполятор, а также ключ и реверсивный счетчик, при этом блок сравнения первым и вторым входами соединен с выходами компенсатора и вычислительного блока соответственно, третий вход блока сравнения и вход компенсатора являются первым входом устройства коррекции, вторым, третьим и четвертым входами которого являются соответствующие входы вычислительного блока, а выходом устройства коррекции является выход блока сравнения, интерполятор первым входом соединен с выходом блока задания скорости, а первым выходом - с приводом подачи продольной координаты, блок задания скорости первым входом соединен с регулятором подачи, вход которого соединен с выходом устройства коррекции, блок задания программы первым выходом соединен со вторым входом устройства коррекции и входом привода шпинделя,а четвертым выходом - со вторым входом интерполятора, датчик мощности входом соединен с выходом привода шпинделя, а выходом - с первым входом устройства коррекции, реверсивный счетчик входом соединен со вторым выходом интерполятора и первым входом ключа, второй вход которого соединен с пятым выходом блока задания программы, а выход - с приводом подачи поперечной координаты, а выходом реверсивный счетчик соединен с четвертым входом устройства коррекции введены блок реализации закономерности преобразования силы резания с устройством ввода, блок изменения тактовой частоты и второй ключ, при этом второй ключ первым входом соединен с выходом блока изменения тактовой частоты, вторым и третьим входами - с соответствующими третьим и шестым выходами блока задания программы, а выходом - со вторым входом блока задания скорости, блок изменения тактовой частоты входом соединен с выходом вычислительного блока, блок реализации закономерности преобразования силы резания с устройством ввода входом соединен со вторым выходом блока задания программы, а выходом с третьим входом устройства коррекции. На чертеже представлена блок- схема предлагаемой адаптивной системы. Система содержит блок 1 задания программы, интерполятор 2, блок 3 задания скорости, станок 4, привод 5 подачи продольной координаты, привод 6 подачи поперечной координаты, привод 7 шпинделя, датчик 8 мощности, компенсатор 9, реверсивный счетчик 10, ключ 11, вычислительный блок 12, блок 13 сравнения, регулятор 14 подачи, устройство 15 коррекции (его образуют блоки 9, 12, 13), блок 16 реализации закономерности преобразования силы резания с устройством ввода, блок 17 изменения тактовой частоты, второй ключ 18, при этом блок 1 задания программы, привод 7 шпинделя, датчик 8 мощности, устройство 15 коррекции, регулятор 14 подачи, блок 3 задания скорости, интер 3 6148 1 полятор 2 и привод 5 подачи продольной координаты соединены последовательно, первый и четвертый выходы блока 1 задания программы подключены ко вторым входам устройства 15 коррекции и интерполятора 2 соответственно, второй выход блока 1 задания программы через блок 16 реализации закономерности преобразования силы резания с устройством ввода подключен к третьему входу устройства 15 коррекции, а третий выход через второй ключ 18 ко второму входу блока 3 задания скорости, выход реверсивного счетчика 10 подключен к четвертому входу устройства 15 коррекции, а вход ко второму выходу интерполятора 2 и к первому входу ключа 11, соединенного вторым входом с пятым выходом блока 1 задания программы, а выходом со входом привода 6 подачи поперечной координаты, причем блок 13 сравнения, входящий в состав устройства 15 коррекции,подключен первым и вторым входами соответственно к выходу компенсатора 9 и к выходу вычислительного блока 12, входы которого являются вторым, третьим и четвертым входами устройства 15 коррекции, третий вход блока 13 сравнения и вход компенсатора 9 являются первым входом устройства 15 коррекции, а выход блока 13 сравнения выходом устройства 15, блок 17 изменения тактовой частоты и второй ключ 18 соединены последовательно, причем второй и третий входы ключа 18 связаны соответственно с третьим и шестым выходами блока 1 задания программы, а выход со вторым входом блока 3 задания скорости, вход блока 17 изменения тактовой частоты соединен с выходом вычислительного блока 12, третий вход которого связан с выходом блока 16 реализации закономерности преобразования силы резания с устройством ввода, подключенного своим входом ко второму выходу блока 1 задания программы. Компенсатор 9 предназначен для формирования и запоминания после каждого включения двигателя напряжения пропорционального активной мощности, потребляемой этим двигателем в режиме холостого хода реверсивный счетчик 10 служит для фиксации текущего значения радиуса обработки и его хранения в виде двоичного кода ключ 11 предназначен для блокирования прохождения приводных импульсов на привод подачи поперечной координаты вычислительный блок 12 служит для формирования на своем выходе напряжения, пропорционального заданной мощности резания блок 13 сравнения служит для формирования на своем выходе напряжения рассогласования регулятор 14 подачи,воздействуя на блок 3 задания скорости, меняет тактовую частоту работы интерполятора таким образом, чтобы напряжение рассогласования на выходе блока 13 сравнения было равным нулю устройство 15 коррекции, которое включает в себя компенсатор 9, вычислительный блок 12 и блок 13 сравнения, предназначено для расчета и формирования напряжения рассогласования, поступающего на вход блока 14 регулирования подачи блок 16 реализации закономерности преобразования силы резания с устройством ввода предназначен для подачи на вход вычислительного блока 12 текущего значения кода силы резания в соответствии с заданной закономерностью изменения силы резания в функции пути блок 17 изменения тактовой частоты формирует текущее значение кода тактовой частоты в соответствии с текущим значением напряжения, сформированного на выходе блока 12 второй ключ 18 предназначен для подачи на вход блока 3 задания скорости текущего значения кода тактовой частоты, сформированного в блоке 17, или кода тактовой частоты,соответствующей скорости быстрого хода, образованного под воздействием управляющей программы в блоке 1. Система работает следующим образом. Система, включающая в себя блок 1 задания программы, интерполятор 2 и блок 3 задания скорости, управляет станком 4 путем воздействия на приводы 5, 6 и двигатель привода 7 шпинделя. Кроме того, на процесс резания оказывают возмущающие воздействия глубина припускаи твердость материала детали НВ. Активная мощность д, потребляемая двигателем привода 7, измеряется датчиком 8 и преобразуется им в напряжение д, пропорциональное величине д. Компенсатор 9 после каждого включения двигателя привода 7 формирует на своем выходе и запоминает напряжение , пропорциональное активной мощ 4 6148 1 ности , потребляемой этим двигателем в режиме холостого хода. Счетчик 10 содержит в виде двоичного кодаинформацию о радиусе обработки. Начальная информация записывается в счетчик при нахождении суппорта поперечной координаты в опорной точке. Изменение этой информации происходит под действием приводных импульсов поперечной координаты, поступающих с одного из выходов интерполятора 2 на вход счетчика 10. Ввод в счетчик 10 информации, соответствующей величине вылета резца, осуществляется под действием управляющей программы, формируемой блоком 1. Для этого в программе записывается специальная команда вылета резца и необходимая величина перемещения по поперечной координате. Под действием команды вылета резца блок 1 блокирует прохождение приводных импульсов через ключ 11, в результате чего информация счетчика 10 изменяется при неподвижном суппорте поперечной координаты, т.е. эта информация приводится в соответствие с истинным радиусом обработки. Код радиуса обработкис выхода счетчика 10 поступает на вход блока 12, на другие входы которого из блока 1 поступают код скорости вращения шпинделя К, который образуется под воздействием управляющей программы, и текущее значение кода заданной силы резания, которое формируется в блоке 16 реализации закономерности преобра 3 зования силы резания с устройством ввода. Начальное значение 3 образуется под воздействием управляющей программы и поступает из блока 1 на вход блока 16. В блоке 16 оно изменяется в соответствии с закономерностью, информация о которой поступает из устройства ввода этого блока. На выходе блока 12 формируется напряжение, пропорциональное текущему произведению значений кодов, К и , а следовательно, пропорциональное и заданной те 3 Т кущей мощности резанияТ , которая определяется из равенства (1) при условии РЗ З ТТЗ ш.(2) З Напряжение пропорциональное текущему значению мощности резания с выхода вычислительного блока 12 поступает на вход блока 17 и на вход блока 13. На выходе блока 17 формируется текущее значение кода тактовой частоты, которое поступает на вход блока 3 задания скорости при условии, что на вход второго ключа 18,связанного с шестым выходом блока 1 задания программы, не поступит команда блокировки (признак быстрого хода). В противном случае ключ 18 пропускает на вход блока 3 код тактовой частоты, соответствующий быстрому ходу, сформированный в блоке 1. Блок 13 формирует на своем выходе напряжение рассогласованияв соответствии с равенствомдхТ . Т Анализируя равенства (3), (2) и (1), можно заключить, что 0 при РЗ . Регулятор подачи 14, воздействуя на блок 3, корректирует тактовую частоту работы интерполятора 2 таким образом, чтобыбыло равно нулю. При этом блок 3 формирует результирующее значение тактовой частоты. Источники информации 1. Самонастраивающиеся системы управления станками. Сборник. - М. НИИМАШ,1971. - С. 39-40. 2. А.с. СССР 744469, МПК 05 В 19/38, 1980 (прототип). Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G05B 19/39
Метки: управления, адаптивная, система, станком
Код ссылки
<a href="https://by.patents.su/5-6148-adaptivnaya-sistema-upravleniya-stankom.html" rel="bookmark" title="База патентов Беларуси">Адаптивная система управления станком</a>
Устройство числового программного управления
Номер патента: 5128
Опубликовано: 30.06.2003
Авторы: Пархутик Алексей Петрович, Резниченко Владимир Иванович, Каштальян Иван Алексеевич
МПК: G05B 19/416, G05B 19/18
Метки: управления, числового, устройство, программного
Текст:
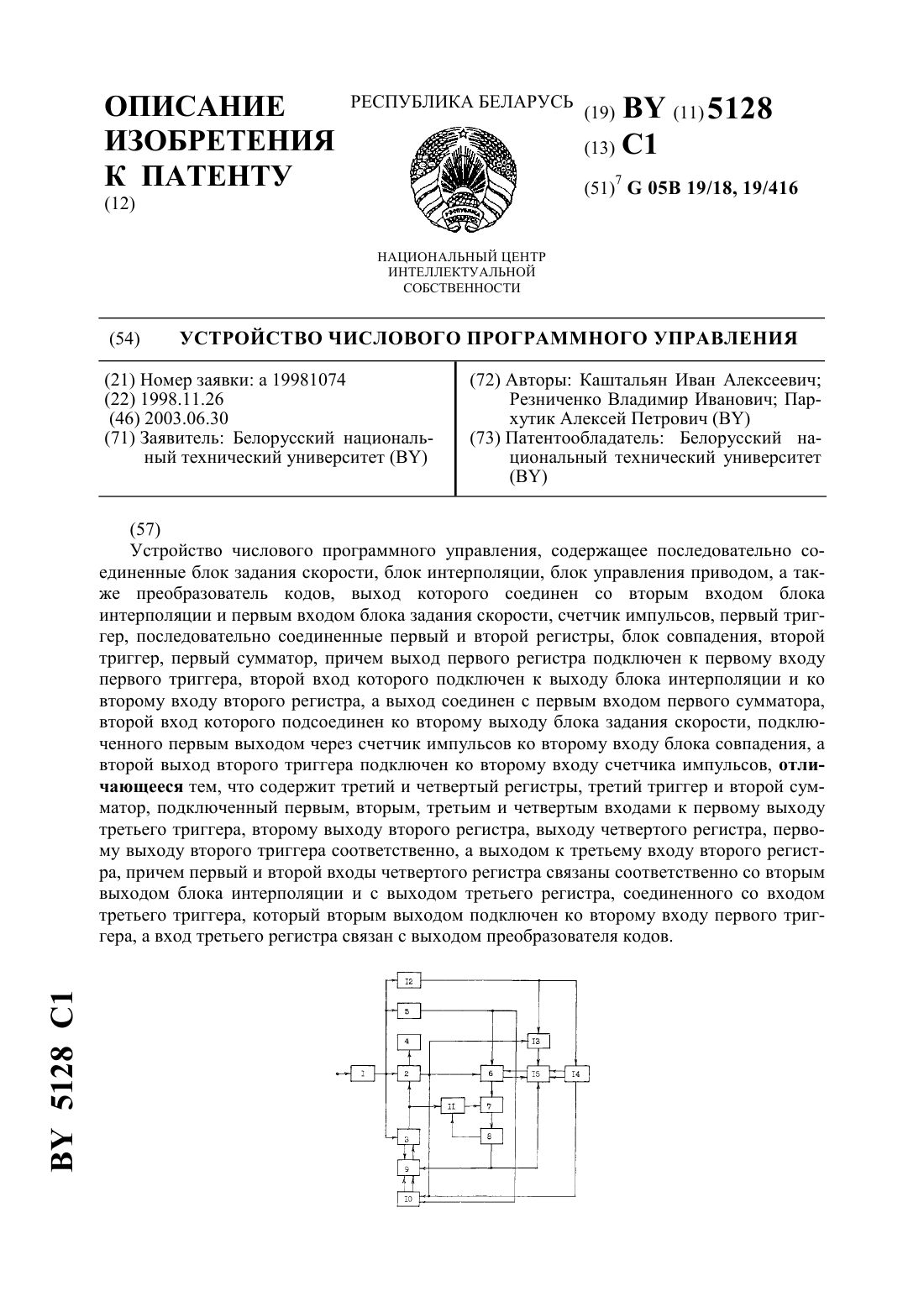
...введены третий и четвертый регистры, третий триггер и второй сумматор, подключенный первым, вторым, третьим и четвертым входами к первому выходу третьего триггера, второму выходу второго регистра, выходу четвертого регистра,2 5128 1 первому выходу второго триггера соответственно, а выходом к третьему входу второго регистра, причем первый и второй входы четвертого регистра связаны соответственно со вторым выходом блока интерполяции и с...
Устройство числового программного управления
Номер патента: 5130
Опубликовано: 30.06.2003
Авторы: Каштальян Иван Алексеевич, Романчук Сергей Иванович, Резниченко Владимир Иванович
МПК: G05B 19/18, G05B 19/416
Метки: числового, устройство, управления, программного
Текст:
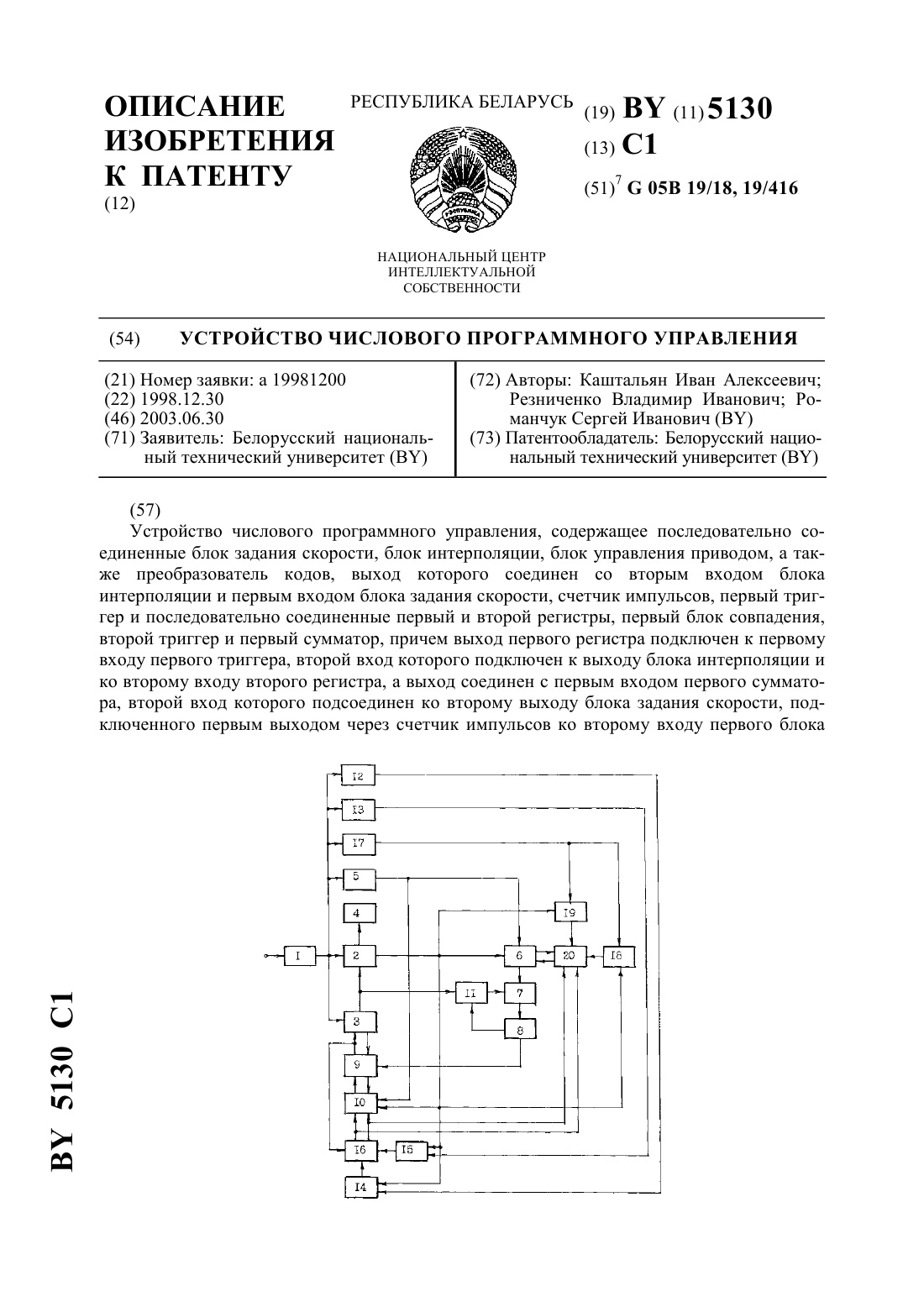
...второго регистра, а выход соединен с первым входом первого сумматора, второй вход которого подсоединен ко второму выходу блока задания скорости, подключенного первым выходом через счетчик импульсов ко второму входу первого блока совпадения, а второй выход второго триггера подключен ко второму входу счетчика импульсов, а также третий, четвертый, пятый и шестой регистры и второй блок совпадения, подключенный первым, вторым и третьим входами к...
Устройство числового программного управления
Номер патента: 5129
Опубликовано: 30.06.2003
Авторы: Романчук Сергей Иванович, Каштальян Иван Алексеевич, Резниченко Владимир Иванович
МПК: G05B 19/18, G05B 19/416
Метки: управления, устройство, программного, числового
Текст:
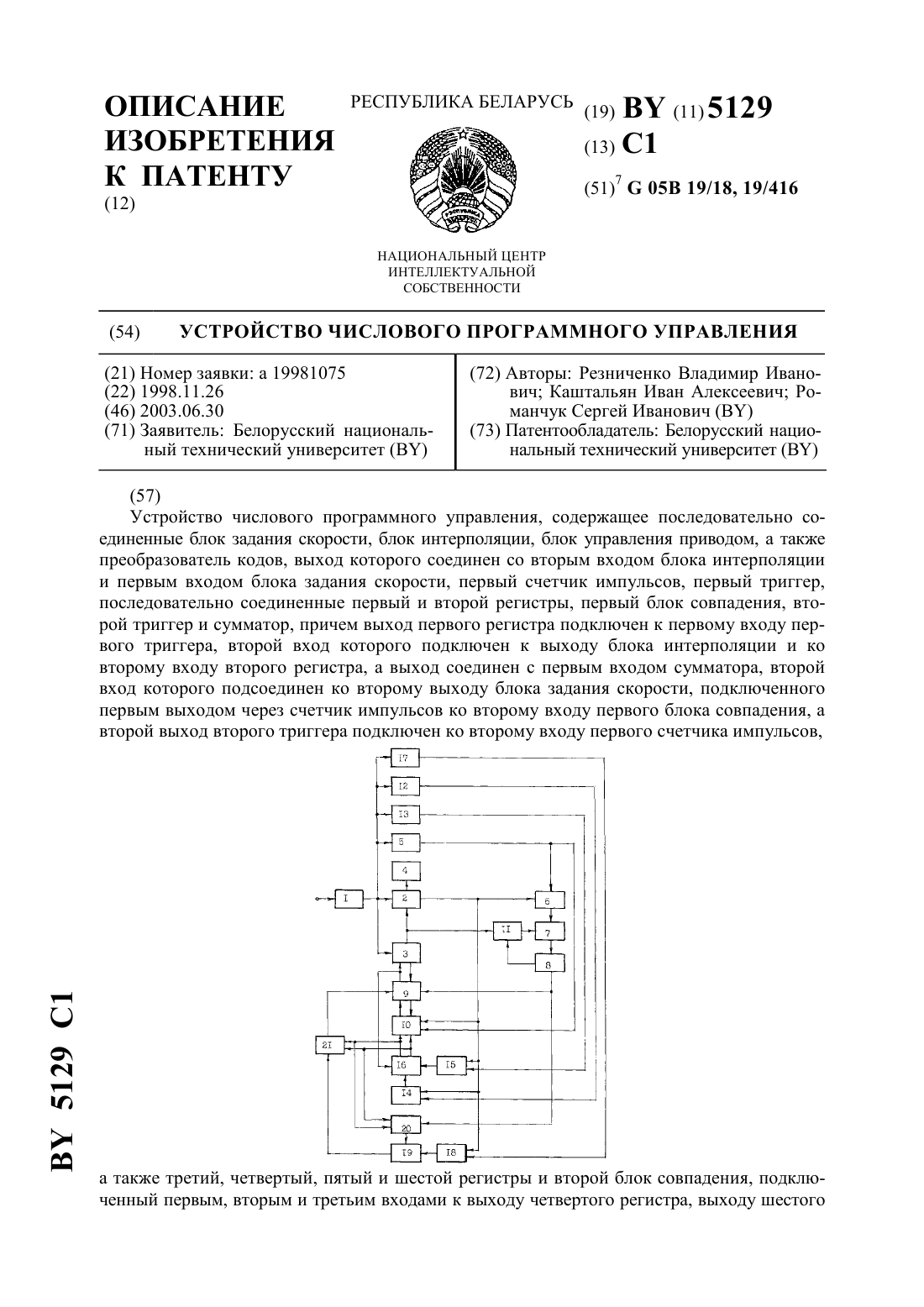
...совпадения соответственно, а также с первым и вторым входами второго счетчика, подключенного третьим входом к первому выходу второго триггера, а выход третьего триггера подключен к четвертому входу сумматора, причем первый вход восьмого регистра связан с выходом блока интерполяции, а второй вход с выходом седьмого регистра, соединенного входом с выходом преобразователя кодов. На чертеже представлена блок-схема устройства. Устройство...
Цифровая следящая система управления
Номер патента: 29
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G05B 15/02
Метки: управления, система, цифровая, следящая
Текст:
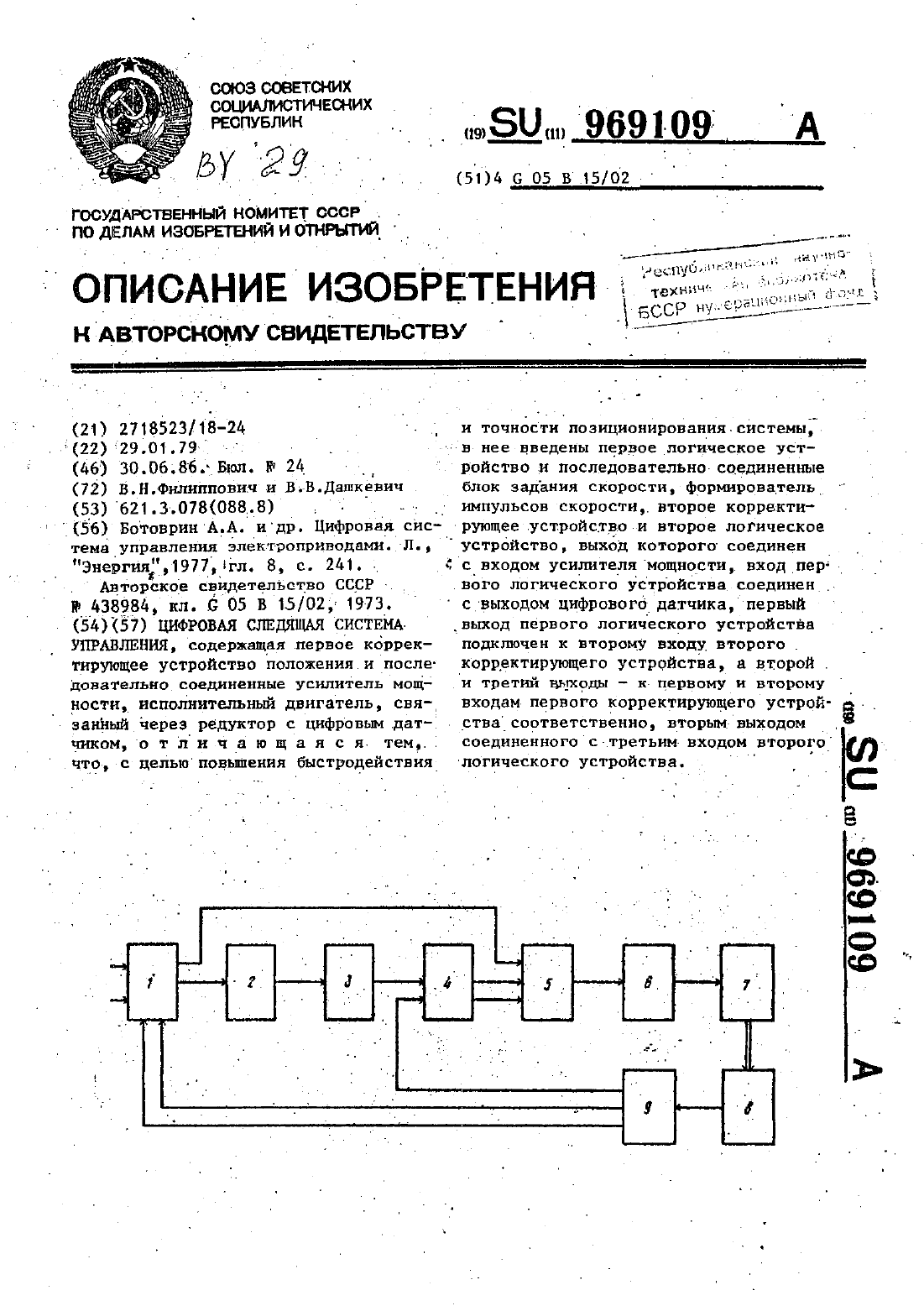
...0 Устройства,И Третий выходы к первому и второму входам первого корректирующего УСТРФЙСТВН соответственно, втдрм-выходом соединенного с третьим входом,второго логического устройства.Такое решение позволит повысить 5 ЫСТрОдЕйствие-и точность позиционирования системы.На чертеже-изображена блоксхема предлагаемой цифровой следящей систет мы управления.Система состоит из последовательно соединенньш первого корректируюЩегоустройства 1,...
Цифровая система управления
Номер патента: 162
Опубликовано: 30.09.1994
Авторы: Овод-Марчук Г. В., Филиппович В. Н., Найденов Г. А.
МПК: G05B 19/18
Метки: система, цифровая, управления
Текст:
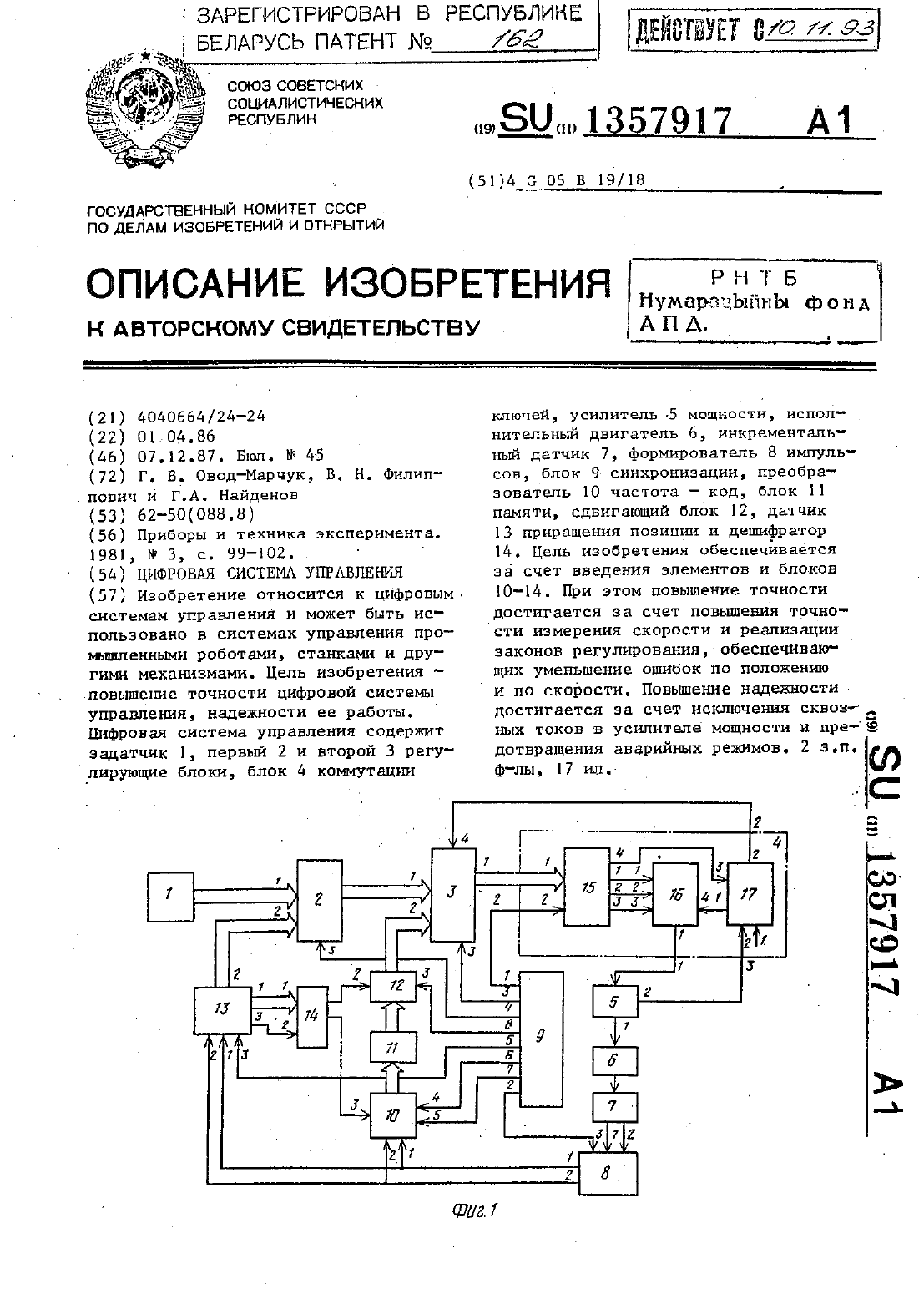
...выходов (например, на первом)-формирователн 8 ньшульсов появляются позиционные импульсы (фиг. 7 В. Каждьт позиционный импульс изменяет на единицу содержимое третьего счетчика 37 датчика 13 приращения позиции(фиг. 7 С). Первый дешифратор 1 дформпрует на первом выходе разрешающий сигнал,-а на втором выходе - импульсной сигнал (фиг. 7 П), если текущий код на выходе третьего счетчика 37 равен Ы, 2, п 0,1,2, .на второй вход сдвигающего блока...
Предыдущий патент: Способ очистки металлической поверхности от солевых отложений
Следующий патент: Система для автоматического управления металлорежущим станком, преимущественно токарным
Случайный патент: Способ получения тетракис-[3-(3,5-дитрет-бутил-4-оксифенил)-пропионил-оксиметил]-метана с аморфной структурой