Устройство перемещения держателя объекта
Текст
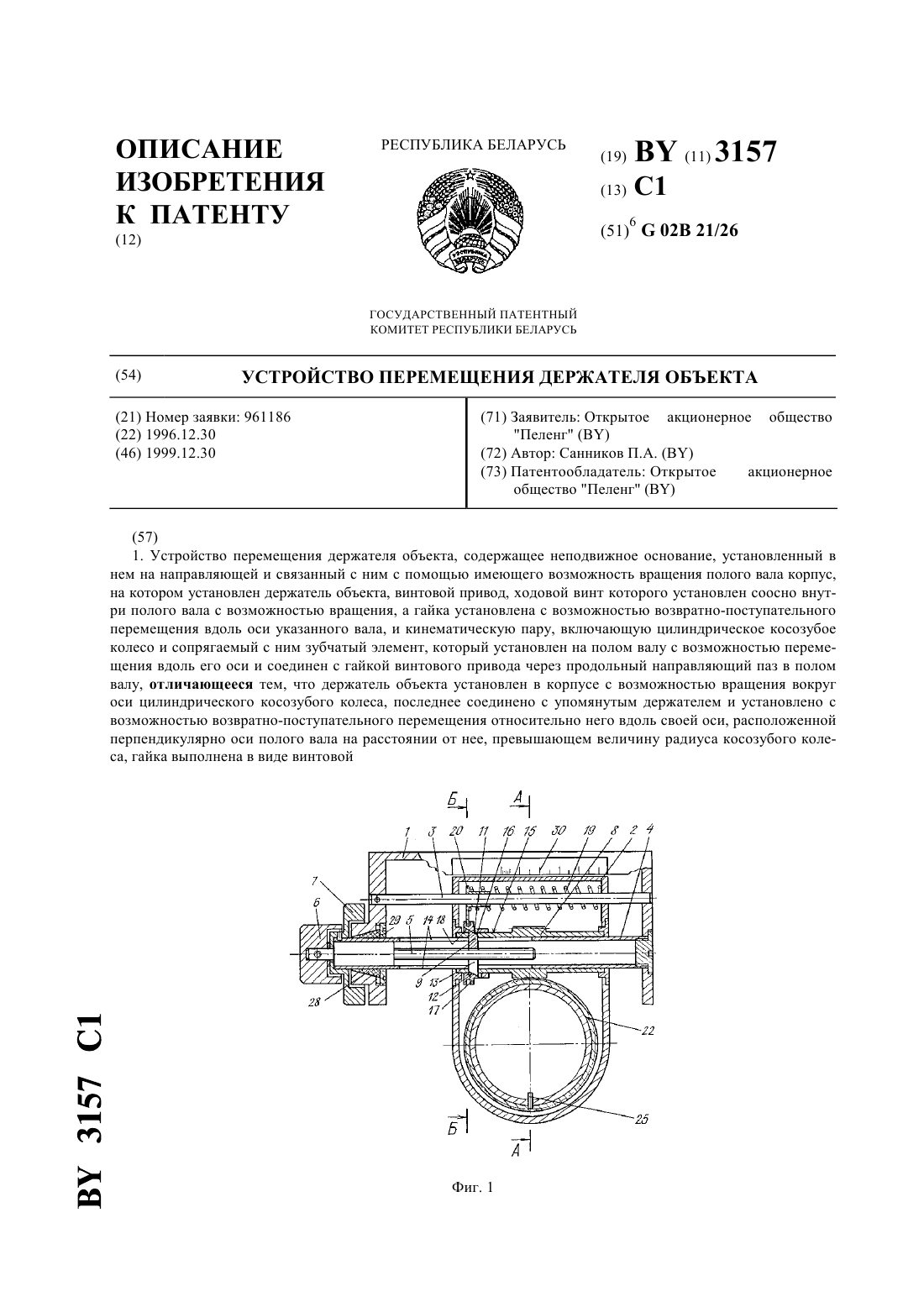
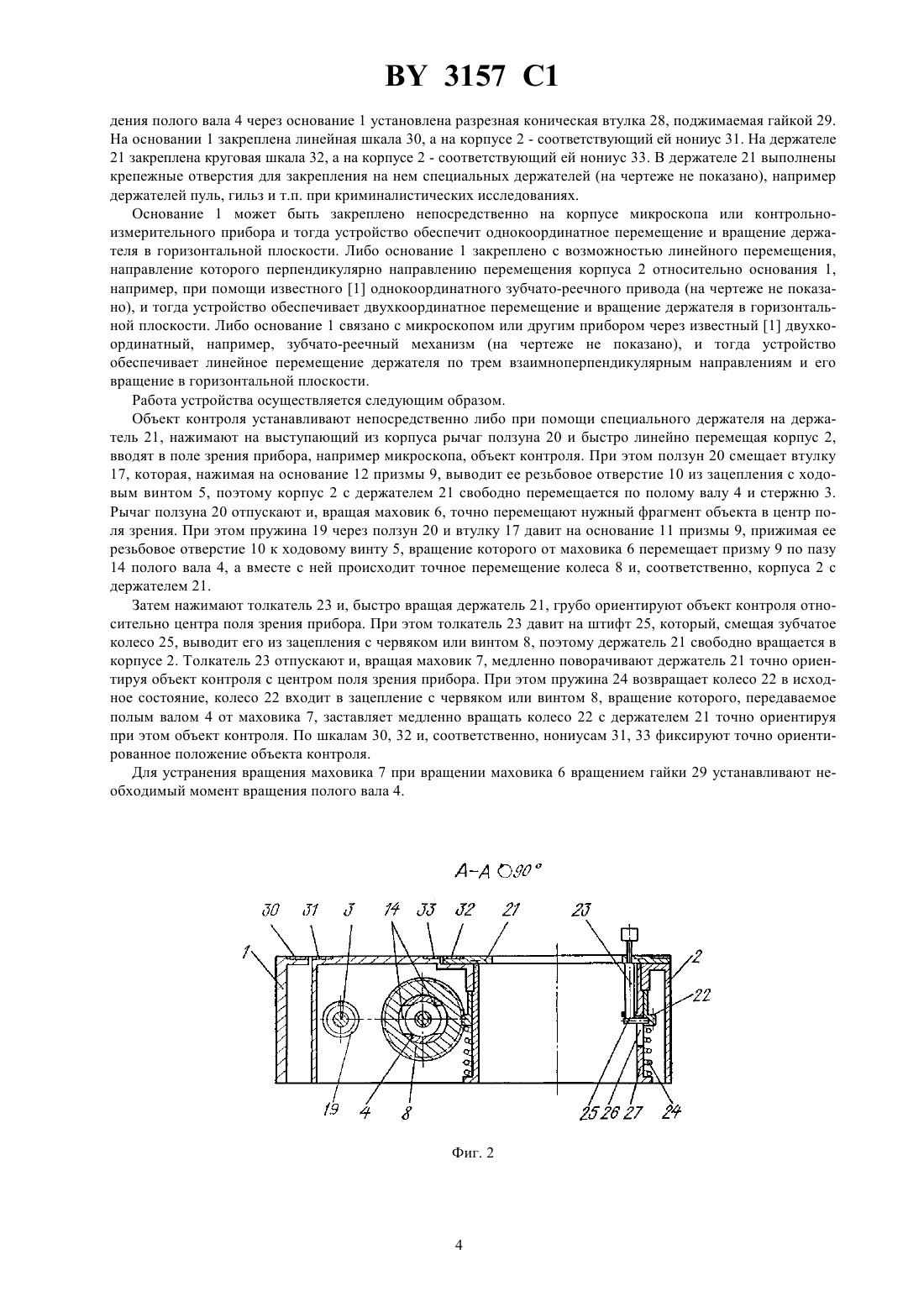
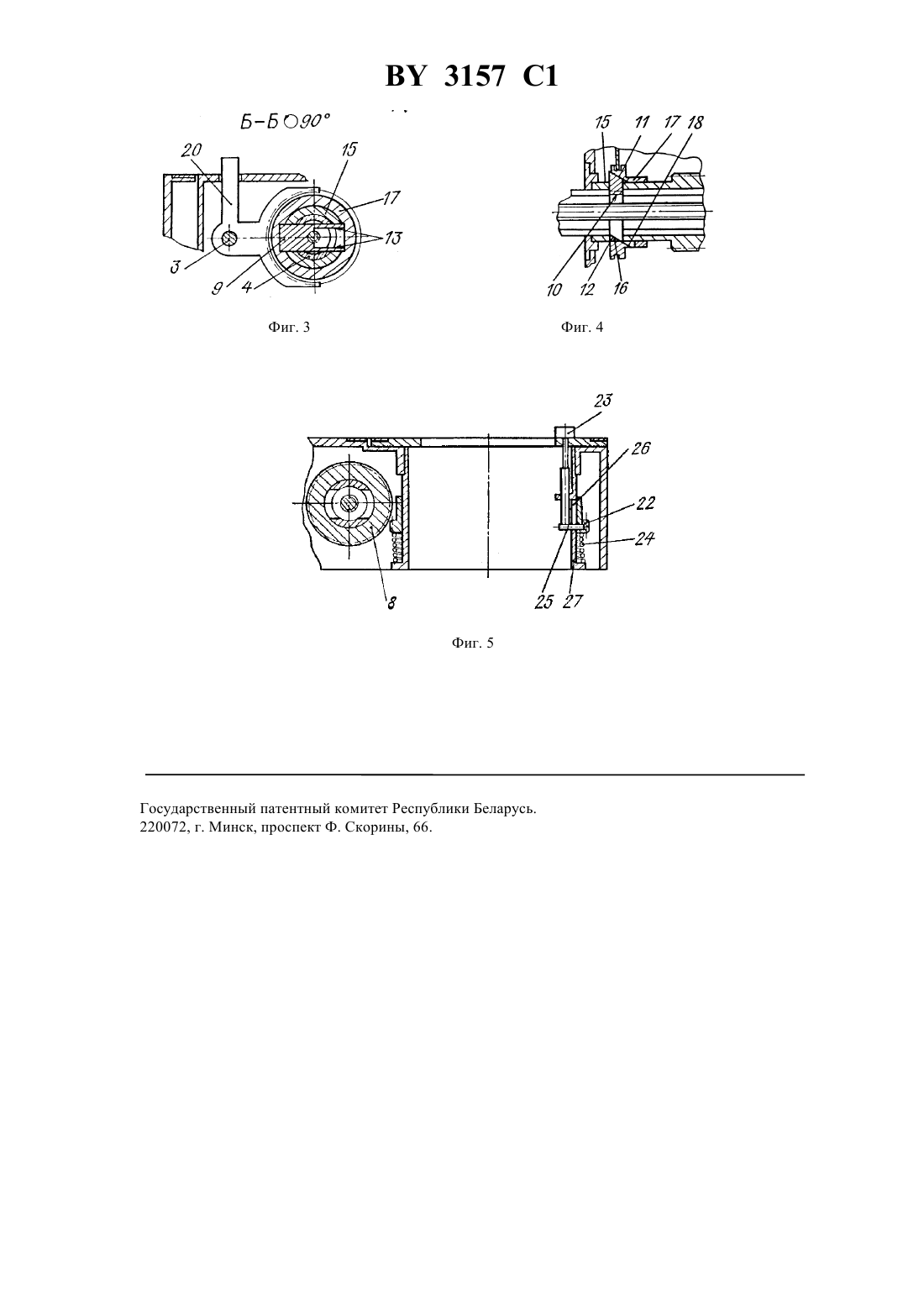
ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ДЕРЖАТЕЛЯ ОБЪЕКТА(71) Заявитель Открытое акционерное общество Пеленг(73) Патентообладатель Открытое акционерное общество Пеленг(57) 1. Устройство перемещения держателя объекта, содержащее неподвижное основание, установленный в нем на направляющей и связанный с ним с помощью имеющего возможность вращения полого вала корпус,на котором установлен держатель объекта, винтовой привод, ходовой винт которого установлен соосно внутри полого вала с возможностью вращения, а гайка установлена с возможностью возвратно-поступательного перемещения вдоль оси указанного вала, и кинематическую пару, включающую цилиндрическое косозубое колесо и сопрягаемый с ним зубчатый элемент, который установлен на полом валу с возможностью перемещения вдоль его оси и соединен с гайкой винтового привода через продольный направляющий паз в полом валу, отличающееся тем, что держатель объекта установлен в корпусе с возможностью вращения вокруг оси цилиндрического косозубого колеса, последнее соединено с упомянутым держателем и установлено с возможностью возвратно-поступательного перемещения относительно него вдоль своей оси, расположенной перпендикулярно оси полого вала на расстоянии от нее, превышающем величину радиуса косозубого колеса, гайка выполнена в виде винтовой 3157 1 гребенки или полугайки и размещена с возможностью возвратно-поступательного перемещения в выполненном в полом валу перпендикулярно его оси направляющем пазу, установленный на полом валу зубчатый элемент соединен с корпусом с возможностью вращения и выполнен в виде червяка или винта, а направляющая выполнена в виде стержня, расположенного параллельно полому валу. 2. Устройство по п.1, отличающееся тем, что гайка выполнена в форме прямоугольной призмы со срезанными под углом к оси резьбового отверстия параллельными основаниями, продольный направляющий паз в полом валу выполнен по размеру ее ширины, на нерабочей цилиндрической части червяка или винта выполнено отверстие по размерам гайки и установлена подпружиненная втулка с идентичным пазом, в указанной гайке вдоль ее оси выполнен паз, шириной превышающей величину диаметра ходового винта и доходящий до половины ее резьбового отверстия, а ее длина превышает величину внутреннего диаметра подпружиненной втулки. Изобретение относится к точному приборостроению и может быть использовано в контрольноизмерительной технике, в частности в микроскопах сравнения и стереоскопических микроскопах. Известно устройство перемещения держателя объекта 1, содержащее неподвижное основание, установленную на нем с возможностью вращения поворотную платформу, держатель объекта, установленный с возможностью возвратно-поступательного перемещения по направляющим, закрепленным на поворотной платформе, винтовой привод, ходовой винт которого установлен на поворотной платформе с возможностью вращения, а гайка закреплена на держателе объекта. Недостатком данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием элементов, позволяющих осуществлять грубое и точное линейное перемещение и поворот держателя объекта. Если ходовой винт и гайка выполнены с мелким шагом, то возможно только точное перемещение, а если с крупным, то возможно только грубое перемещение. Наиболее близким техническим решением является устройство перемещения держателя объекта 2, содержащее неподвижное основание, установленный в нем на направляющих и связанный с ним с помощью имеющего возможность вращения полого вала корпус, на котором установлен держатель объекта, винтовой привод, ходовой винт которого установлен соосно внутри полого вала с возможностью вращения, а гайка установлена с возможностью возвратно-поступательного перемещения вдоль оси указанного вала, и кинематическую пару, включающую цилиндрическое косозубое колесо и сопрягаемый с ним зубчатый элемент, который установлен на полом валу с возможностью перемещения вдоль его оси и соединен с гайкой винтового привода через продольный направляющий паз в полом валу. Зубчатым элементом, сопрягаемым с цилиндрическим косозубым колесом, является косозубая рейка, закрепленная на неподвижном основании. Работа устройства основана на грубом перемещении держателя при повороте полого вала с косозубым колесом и точном перемещении держателя при повороте ходового винта, т.е. при линейном смещении косозубого колеса вдоль полого вала, за счет скольжения зуба колеса по наклонному зубу рейки. Недостатком данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием элементов, позволяющих осуществлять грубый и точный поворот держателя объекта. В основу изобретения положена задача создания устройства перемещения держателя объекта, обеспечивающего как грубое, так и точное линейное и вращательное перемещение держателя, что позволит расширить его функциональные возможности. Сущность изобретения заключается в том, что в устройстве перемещения держателя объекта, содержащем неподвижное основание, установленный в нем на направляющей и связанный с ним с помощью имеющего возможность вращения полого вала корпус, на котором установлен держатель объекта, винтовой привод, ходовой винт которого установлен соосно внутри полого вала с возможностью вращения, а гайка установлена с возможностью возвратно-поступательного перемещения вдоль оси указанного вала, и кинематическую пару, включающую цилиндрическое косозубое колесо и сопрягаемый с ним зубчатый элемент, который установлен на полом валу с возможностью перемещения вдоль его оси и соединен с гайкой винтового привода через продольный направляющий паз в полом валу, держатель объекта установлен в корпусе с возможностью вращения вокруг оси цилиндрического косозубого колеса, последнее соединено с упомянутым держателем и установлено с возможностью возвратно-поступательного перемещения относительно него вдоль своей оси, расположенной перпендикулярно оси полого вала на расстоянии от нее, превышающем величину радиуса косозубого колеса, гайка выполнена в виде винтовой гребенки или полугайки и размещена с возможностью возвратно-поступательного перемещения в выполненном в полом валу перпендикулярно его оси направляющем пазу, установленный на полом валу зубчатый элемент соединен с корпусом с возможно 2 3157 1 стью вращения и выполнен в виде червяка или винта, а направляющая выполнена в виде стержня, расположенного параллельно полому валу. Гайка выполнена в форме прямоугольной призмы со срезанными под углом к оси резьбового отверстия параллельными основаниями, продольный направляющий паз в полом валу выполнен по размеру ее ширины, на нерабочей цилиндрической части червяка или винта выполнено отверстие по размерам гайки и установлена подпружиненная втулка с идентичным пазом, в указанной гайке вдоль ее оси выполнен паз, шириной превышающей величину диаметра ходового винта и доходящий до половины ее резьбового отверстия, а ее длина превышает величину внутреннего диаметра подпружиненной втулки. Размещение держателя объекта в корпусе с возможностью вращения вокруг оси цилиндрического косозубого колеса, соединенного с держателем, размещение косозубого колеса с возможностью возвратнопоступательного перемещения относительно держателя вдоль своей оси, расположенной перпендикулярно оси полого вала на расстоянии от нее, большем радиуса косозубого колеса, и выполнение зубчатого элемента, установленного на полом валу, в виде червяка или винта позволяет при вращении полого вала с червяком или винтом поворачивать держатель на любой угол с высокой точностью, а при смещении косозубого колеса вдоль своей оси выводить его из зацепления с червяком или винтом и за счет этого грубо и быстро поворачивать держатель на любой угол. Выполнение гайки в виде винтовой гребенки или полугайки, размещение ее с возможностью возвратно-поступательного перемещения по направляющему пазу полого вала перпендикулярно его оси, соединение зубчатого элемента, расположенного на полом валу с корпусом с возможностью вращения, и выполнение направляющей в виде стержня, расположенного параллельно полому валу, позволяет при вращении ходового винта осуществлять точное линейное перемещение держателя, а при смещении винтовой гребенки или полугайки по направляющему пазу перпендикулярно его оси выводить из зацепления ходовой винт и гайку и за счет этого осуществлять грубое и быстрое линейное перемещение держателя. Все перечисленное позволяет осуществлять точное и грубое линейное и вращательное перемещение держателя, т.е. расширить функциональные возможности устройства. Выполнение гайки в форме прямоугольной призмы со срезанными под углом к оси резьбового отверстия параллельными основаниями, выполнение продольного направляющего паза в полом валу по размеру ширины указанной призмы, выполнение на нерабочей цилиндрической части червяка или винта отверстия по размерам гайки и введение в устройство подпружиненной втулки с идентичным пазом, размещение втулки на нерабочей цилиндрической части червяка или винта, выполнение в гайке вдоль ее оси паза, шириной превышающего диаметр ходового винта и доходящего до половины резьбового отверстия, и выполнение длины прямоугольной призмы, большей внутреннего диаметра подпружиненной втулки, позволяет в исходном состоянии устройства при помощи подпружиненной втулки прижимать через срезанное под углом одно из оснований в призме ее резьбовое отверстие к ходовому винту, т.е. в исходном состоянии при повороте ходового винта осуществлять точное перемещение держателя. А при осевом смещении подпружиненной втулки за счет другого срезанного под углом основания призмы выводить из зацепления резьбовое отверстие в призме с ходовым винтом и тем самым позволяет осуществлять грубое и быстрое перемещение держателя, т.е. позволяет простым нажатием на втулку осуществлять переключение устройства с точного на грубое перемещение. Сущность изобретения поясняется чертежами на фиг. 1-5. На фиг. 1 изображено устройство в разрезе в исходном состоянии при виде на него сверху. На фиг. 2 - сечение А-А на фиг. 1. На фиг. 3 - сечение Б-Б на фиг. 1. На фиг. 4 - часть устройства, изображенного на фиг. 1 при его переключении с точного линейного перемещения на грубое. На фиг. 5 - часть устройства, изображенного на фиг. 2, при его переключении с точного вращательного перемещения на грубое. Устройство перемещения держателя объекта содержит неподвижное основание 1, корпус 2, связанный с основанием 1 направляющим стержнем 3 и полым валом 4, установленным с возможностью вращения в корпусе 2 и основании 1. В полом валу 4 соосно с ним установлен с возможностью вращения ходовой винт 5 с маховиком 6. На полом валу 4 закреплен маховик 7 и установлен с возможностью линейного перемещения червяк или винт 8, соединенный с корпусом 2 с возможностью вращения. Ходовой винт 5 в исходном состоянии соединен с полугайкой, выполненной в виде призмы 9 с резьбовым отверстием 10, срезанными под углом к оси отверстия 10 параллельными основаниями 11 и 12 и пазом 13, шириной больше диаметра ходового винта 5, доходящим до половины резьбового отверстия 10. В полом валу 4 выполнен продольный направляющий паз 14 по размеру призмы 9. В цилиндрической нерабочей части 15 червяка или винта 8 выполнено отверстие 16 по размерам призмы 9. На поверхности 15 установлена втулка 17 с пазом 18,выполненным по размеру призмы 9, длина которой выполнена большей внутреннего диаметра втулки 17. Втулка 17 при помощи пружины 19 и ползуна 20, скользящего по стержню 3, прижимается к основанию 11 призмы 9. Держатель 21 установлен в корпусе 2 с возможностью вращения вокруг оси цилиндрического косозубого колеса 22, установленного с возможностью возвратно-поступательного перемещения относительно держателя 21 вдоль своей оси при помощи толкателя 23 и пружины 24. Колесо 22 кинематически связано с толкателем 23 при помощи штифта 25, проходящего через паз 26 в оправе 27 держателя 21. В месте прохож 3 3157 1 дения полого вала 4 через основание 1 установлена разрезная коническая втулка 28, поджимаемая гайкой 29. На основании 1 закреплена линейная шкала 30, а на корпусе 2 - соответствующий ей нониус 31. На держателе 21 закреплена круговая шкала 32, а на корпусе 2 - соответствующий ей нониус 33. В держателе 21 выполнены крепежные отверстия для закрепления на нем специальных держателей (на чертеже не показано), например держателей пуль, гильз и т.п. при криминалистических исследованиях. Основание 1 может быть закреплено непосредственно на корпусе микроскопа или контрольноизмерительного прибора и тогда устройство обеспечит однокоординатное перемещение и вращение держателя в горизонтальной плоскости. Либо основание 1 закреплено с возможностью линейного перемещения,направление которого перпендикулярно направлению перемещения корпуса 2 относительно основания 1,например, при помощи известного 1 однокоординатного зубчато-реечного привода (на чертеже не показано), и тогда устройство обеспечивает двухкоординатное перемещение и вращение держателя в горизонтальной плоскости. Либо основание 1 связано с микроскопом или другим прибором через известный 1 двухкоординатный, например, зубчато-реечный механизм (на чертеже не показано), и тогда устройство обеспечивает линейное перемещение держателя по трем взаимноперпендикулярным направлениям и его вращение в горизонтальной плоскости. Работа устройства осуществляется следующим образом. Объект контроля устанавливают непосредственно либо при помощи специального держателя на держатель 21, нажимают на выступающий из корпуса рычаг ползуна 20 и быстро линейно перемещая корпус 2,вводят в поле зрения прибора, например микроскопа, объект контроля. При этом ползун 20 смещает втулку 17, которая, нажимая на основание 12 призмы 9, выводит ее резьбовое отверстие 10 из зацепления с ходовым винтом 5, поэтому корпус 2 с держателем 21 свободно перемещается по полому валу 4 и стержню 3. Рычаг ползуна 20 отпускают и, вращая маховик 6, точно перемещают нужный фрагмент объекта в центр поля зрения. При этом пружина 19 через ползун 20 и втулку 17 давит на основание 11 призмы 9, прижимая ее резьбовое отверстие 10 к ходовому винту 5, вращение которого от маховика 6 перемещает призму 9 по пазу 14 полого вала 4, а вместе с ней происходит точное перемещение колеса 8 и, соответственно, корпуса 2 с держателем 21. Затем нажимают толкатель 23 и, быстро вращая держатель 21, грубо ориентируют объект контроля относительно центра поля зрения прибора. При этом толкатель 23 давит на штифт 25, который, смещая зубчатое колесо 25, выводит его из зацепления с червяком или винтом 8, поэтому держатель 21 свободно вращается в корпусе 2. Толкатель 23 отпускают и, вращая маховик 7, медленно поворачивают держатель 21 точно ориентируя объект контроля с центром поля зрения прибора. При этом пружина 24 возвращает колесо 22 в исходное состояние, колесо 22 входит в зацепление с червяком или винтом 8, вращение которого, передаваемое полым валом 4 от маховика 7, заставляет медленно вращать колесо 22 с держателем 21 точно ориентируя при этом объект контроля. По шкалам 30, 32 и, соответственно, нониусам 31, 33 фиксируют точно ориентированное положение объекта контроля. Для устранения вращения маховика 7 при вращении маховика 6 вращением гайки 29 устанавливают необходимый момент вращения полого вала 4. Государственный патентный комитет Республики Беларусь. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G02B 21/26
Метки: перемещения, объекта, держателя, устройство
Код ссылки
<a href="https://by.patents.su/5-3157-ustrojjstvo-peremeshheniya-derzhatelya-obekta.html" rel="bookmark" title="База патентов Беларуси">Устройство перемещения держателя объекта</a>
Устройство перемещения держателя объекта

Номер патента: 2439
Опубликовано: 30.12.1998
Авторы: Казеев Юрий Иванович, Санников Петр Алексеевич, Сенько Александр Ярославович
МПК: G02B 21/26
Метки: объекта, перемещения, держателя, устройство
Текст:
...зубчатого колеса зубчато-реечного привода на втором валу, а рейки этого привода - на каретке, и выполнение рейки в сечении в виде части круга, ось которого совпадает с осью вращения косозубого или червячного колеса, позволяет при повороте держателя вокруг оси косозубого или червячного колеса обкатываться зубьями рейки, закрепленной на каретке, по зубьям зубчатого колеса, закрепленного на втором валу, не выходя из зацепления, а при...
Устройство перемещения сшиваемого материала швейного полуавтомата

Номер патента: 2501
Опубликовано: 30.12.1998
Авторы: Сункуев Борис Семенович, Зудов Валерий Иванович, Агафонов Виктор Федорович, Масалович Святослав Алексеевич, Беликов Сергей Александрович
МПК: D05B 21/00
Метки: сшиваемого, швейного, устройство, перемещения, полуавтомата, материала
Текст:
...связи шаговых электродвигателей с траверсой и кареткой, выполненные в виде зубчатых передач и передач рейка-шестерня, барабана и ходового вала, траверса снабжена дополнительной направляющей для каретки,установленной параллельно первой, а средства кинематической связи шаговых электродвигателей с траверсой и кареткой снабжены дополнительным барабаном, причем оба барабана установлены по краям траверсы,выполнены с возможностью вращения...
Устройство для затяжки и балансировки держателя штампа пресса
Номер патента: 980
Опубликовано: 15.12.1995
Автор: Герхард Хайтце
МПК: B21B 1/02
Метки: пресса, держателя, устройство, штампа, затяжки, балансировки
Текст:
...З известен пресс для редуцирования ширины слябов в станах горячей прокатки с держателями инструмента для крепления на них штамов расположенные по обе стороны от кромки сляба с возможностью перемещения иривошипношатунным механизмом к кромке сляба. Держатель инструмента удерживается двумя-параллельным плунжерами, которые с воз можностью вращения с помощью резьбы направляются н траверсе. Плунамеры с помощью двигателей вращаются расположенной...
Устройство для разъемного соединения инструмента и держателя обжимного пресса
Номер патента: 1031
Опубликовано: 14.03.1996
Авторы: Хорст Графе, Герхард Хайтце
МПК: B21J 13/02, B30B 15/02
Метки: держателя, обжимного, разъемного, пресса, соединения, инструмента, устройство
Текст:
...взаимодействия торцом, обращенным в сторону головки стержня, с пакетом тарельчатых пружин, а поворачивающее устройство выполнено в виде закрепленного на стержне рычага, соединенного с управляемым приводом в виде цилиндра, при этом центрирующий паз на инструменте расположен, по меньшей мере, на одной из его полок, а центрирующий элемент выполнен в виде закрепленного на держателе посадочного пальца.Согласно варианту изобретения, в...
Устройство для перемещения осветителя наблюдательных оптических аппаратов
Номер патента: 2777
Опубликовано: 30.06.1999
Автор: БИРЮКОВ Федор Иванович
МПК: A61B 3/00, F21V 19/02
Метки: наблюдательных, аппаратов, перемещения, осветителя, оптических, устройство
Текст:
...Задача решается за счет того, что сферическая направляющая снабженная червячной парой, кинематически связана с осветителем, причем сферическая направляющая снабжена регулирующим узлом, изменяющим ее длину, а также переходным узлом, посредством которого сферическая направляющая связана с осветителем, выполненным в виде винта и рейки. На фиг. 1 изображено устройство, вид спереди при открытой крышке корпуса. На фиг. 2 - вид сбоку (разрез по...
Предыдущий патент: Устройство для прессования изделий из порошка
Следующий патент: Влагомер
Случайный патент: Комплект средств для мойки транспортных средств