Педальный механизм
Текст
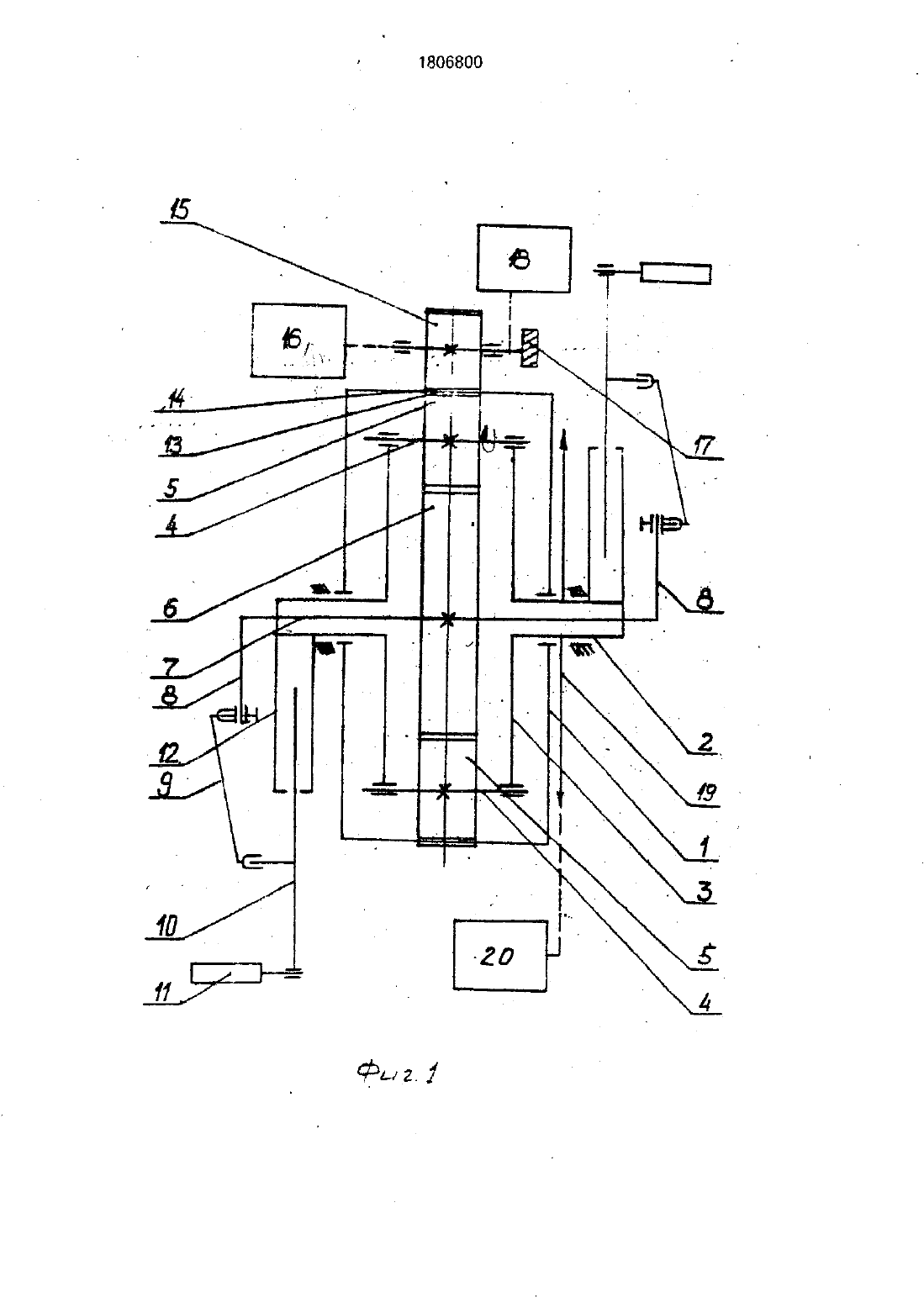
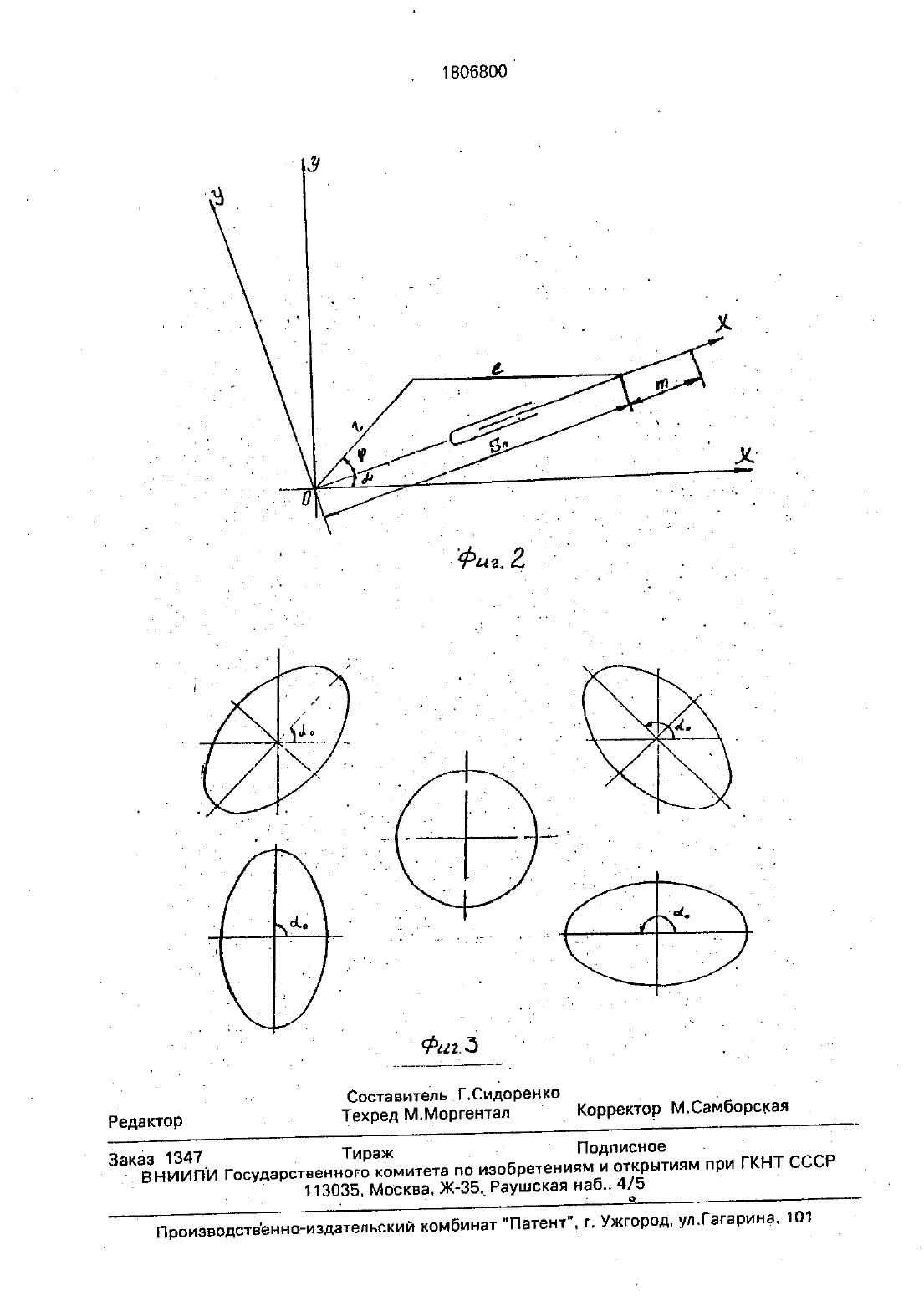
БЕЛАРУСЬ ПАТЕНТ ЫЦД 22СОЮЗ СО ВЕТСКИХ СОЦИАЛИСТИЧЕСКИХгосударственное пдтЕнтноЕ ведомство СССРА к (57) Использование. изобретения в устрой страх длярбеспечения дозированной на г-рузки на. конечности человека при-е реабилитационныхили профилактических у тренировках Сущность изобретения пе Иаобретение относится к- медицинской утехнике,а именно. к устройствамдля обес печения дозированной нагрузки на конечнолибоЦ профилактическихтренировках. у - . цепьюизобретения является обеспечел ние возможности индивидуального дозиро вания нагрузки на различные группы мышц конечностей путем изменения формы иориентации траектории их движения при тренировках. уНа фиг предоставлена схема педального механизма на фиг.2 схема для расчета траектории на фиг.З - варианты ориентации и формы траектории движения педалей.Педальный механизм содержит подвижный корпус 1. установленный на полой оси 2 барабана З.в котором закреплены оси 4 сателлитов 5. входящих в зацепление с солнечной шестерней Б, закрепленной на оси 7.дельный механизм содержит полый корпус. Корпус установлен на полуосях барабана. В барабане закреплены оси сателлитов солнечной шестерни. Солнечная шестерня ус тановлена по оси коаксиальной полуосямбарабана. На оси солнечной шестерни за креплены кривошипы переменной ДЛИНЫ.КОТОРЫЕ СВЙЗЗНЫ ПОСПВДСТВОМ ТЯГ С ТЭЛСКО пическими шатунами с педалями. Телескопические шатуны закреплены на полуосяк. На внутренней поверхности корпуса имеется коронная шестерня для сателлитов. 3 ел. ф-лырз ил.установленной коаксиально с полой осью 2. На оси 7 закреплены кривошипы 8 переменНОЙ ДЛИН Ы. СОЭДИНВННЫЭ ТЯГЗМИ 9 С ТВЛЕСКО пическими шатунами 10. снабженными педалями 11. Телескопические шатуны 10 закреплены на полсйоси 12. Коронная шес терня 13. выполненная на внутренней пок корпуса 1 выполнена шестерня 14. входя щая в зацепление с установочной шестерней 15, доанематически соединенной с узлом управления 16 и снабженной рукояткой 17 со шкальным механизмом 18. На полой оси 2 закреплена ведущая звездочка 19, кинема тически соединенная с тормозным узлом 20.Педальный механизм работает следующим образом.При вращении педалей 11 ногами либо руками длина телескопического шатунгдШбудет изменяться за счет вращения кривошипа 8 переменной длины стягой 9. Плане тарная зубчатая передача. состоящая избарабана 3 с сателлитами-д, солнечной Б и коронарной 13 шестерен. выполнена таким образом. что ее передаточное отношение может принимать только два значения - 1 и 3. Только при указанных значениях пере 0 даточного отношения траектории движенияпедалей будут представлять собой замкну Используя фиг.2 простыми тригономет 1806800рическими преобразованиями можно пол-- а о а 2 т . где ан угловая скорость вращения. криво шипа В - у - то - угловая скорость вращения телеци соожтношение длины кривошипа. к длине тяги через - в дан оу Формула (10) предста-вляетсобой уравнение движения педалей 11 провальной траектории. С изменением параметров г.Ям т можно задаватьтребуемую форму тра-- движения педалей 11 длятпередаточного отношения планетарной передачи. равногоц ЧЮ. овальных траекторий удвижениядконечно- д стей. приводящих в движение педали 11а Таким образомддпя изменения формыдостаточно изменить длину кривошипа 8 либо расстояние от оси тяги 9 до педали 11. Для изменения положения осей овальной траектории движения педалей 11 достаточ но изменить начальный уголйад -(фиг.3) по ворачивая корпус 1 при помощи рукоятки 17 пошкальному механизму 18 до фиксирован, ного положения. либо по заданному законуразованияидпину телескопического шатуна Ю можно выразить в прямоугольных координатах 0 япри помощи узла управления 16. Узелуправления может быть выполнен. например. .в виде маломощного низкооборотного алектродвигателя. управляемоло программируемымтаймером. .В зависимости от вида тренируемых групп мышц конечнос 1 ей предварительноустанавливают длину кривошипа 8. положе- уние корпуса 1 при помощи рукоятки 17 по шкальному механизму 18 и величину нагрузки тормозным узлом 19. Тормозной узел может быть выполнен в виде набора фрикционных дисков с нормированным значением тормозного момента и с возможно стьюего регулировки. При необходимости у я изменения конфигурации траектории по за 5 1806800 пДЭННОМУ ЗЭКОНУ ВКЛЮЧЭЮТ УЗЕЛ УППЭВЛЕНИЯ 16, Пациент приводит в движение педали 11 при помощи рук или ног. В случае проведения тренировки ногами пациент располагается в положении сидя. при этом нагрузочный узел фиксируется на попу. При необходимости проведения тренировки конечностей по круговой траектории тяга 9 отключается. а телескопический шатун 10 фиксируется в определенном положении. Изобретение позволяет проводить тренировки пациента с возможностью индивидуального доаирования как величины нагрузки, так и формы и ориентации траектории движения конечностей. т Предлагаемый нагрузочный узел может БЫТЬ применен как В малозргометрах И велотренажерах. так и в аппаратахфдля механотерапии. а1. Педальный механизм. содержащий коленчатый рычаг. Несущий два телескопи ЧЗСКИХ ШЭТУНВ, ПЛЭНЕТЭВНУЮ губчатую пере-дачу и средство передачи движения оттельного движения последних, от л и ч а юЩ и Й С Я ТВМ ЧТО. С целью ПОВЫШЕНИЯ эффективности использования. средство передачи движения выполнено в виде установленного с возможностью вращения кор пуса. барабана. размещенного в корпусепосредством полых полуосей и двух кривошипов с переменной ДЛИНОЙ а планетарная зубчатая передача выполнена в виде солнечной шестерни. жестко установленной на оси расположенной коаксиально полуосям барабана, двух сателлитов. оси которых установлены на барабане. и коронной шестерни. расположенной на внутренней поверхности корпуса, при этом кривошипы с переменной длиной жестко установлен ы на оси солнечного колеса и связаны соответственно с одним из телескопических шатунов, телескопиче СКИЕ ШЗТУНЫ СМОЦТИПОБЭНЫ на ПОЛУОСЯХ2. Механизм поп.1.отлича тощийс я тем. что передаточное отношение планетарной зубчатой передачи составляет (-1) или (3). 3. Механизм по п.1.отлича ю щи йс я тем. что он имеет тормозной узел. а на одной из полуосейсмонтирована звездочка. при этом звездочка кинематически связана с тормозным узлом.4.Механизм по пп.1 е З.отл ича ю- щ и й с я тем. что он имеет узел управления. кинематически связанный с корпусом, приЭТОМ КИНВМЭТИЧЭСКЭЯ СВЯЗЬ выполнена В ВИ де шестерни, расположенной на внешней поверхности корпуса. и входящей с ней в зацепление установочной шестерни. имеющей шкальньлй механизм и соединенной с узлом управления.
МПК / Метки
МПК: A63B 22/06
Код ссылки
<a href="https://by.patents.su/5-111-pedalnyjj-mehanizm.html" rel="bookmark" title="База патентов Беларуси">Педальный механизм</a>
Механизм Хибника для передачи вращения
Номер патента: 25
Опубликовано: 30.05.1994
Автор: Хибник Иосиф Наумович
МПК: F16H 1/22
Метки: хибника, механизм, вращения, передачи
Текст:
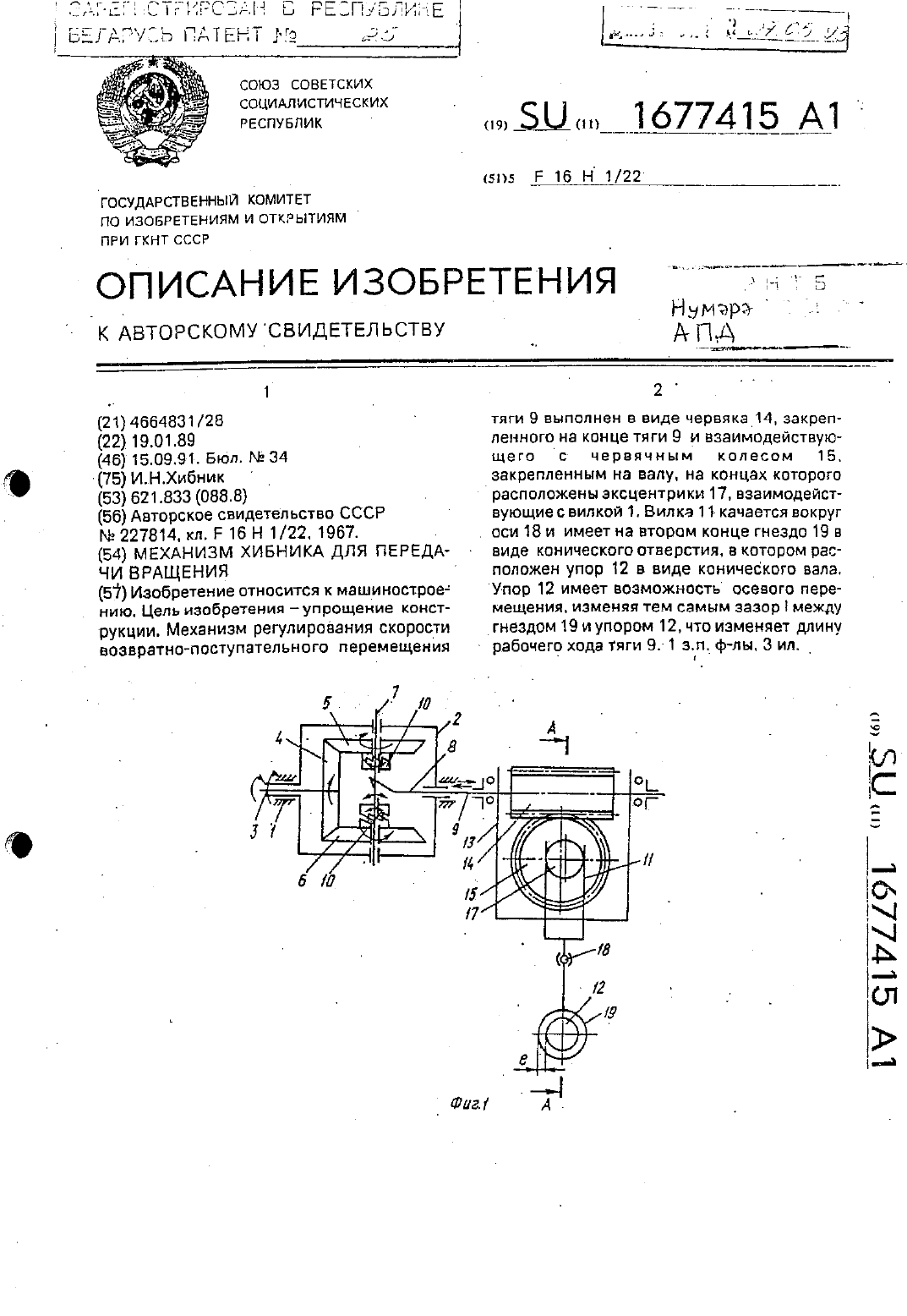
...8. тягой 9 и червяком 14. Червяк 14 сообщает вращение червячному колесу 15. которое через вал 16 сообщает вращение эксцентриком 17.Эксцентрики 17, езатчмодействуя с ВИЛкой 11. стремятся повернуть ее вокруг не подвижной оси 18, При этом вокруг этой же оси поворачивается гнездо 19. Когда упор 12 образует с гнездом 19 зазор е. вилка 11 СВОбОДНО КЗЧЭЕТСЯ ВОКПУГ НЭПОДВИЗКНОЙ ОСИ 18 и валы 2 и 3 вращаются ос одинаковой скоростью. так как тяга 9 не...
Гидравлический ударный механизм
Номер патента: 126
Опубликовано: 30.09.1994
Авторы: Кичигин А. Ф., Колено А. В., Кучерявый В. М., Баландинский Е. Д., Григорьев С. В., Колено В. В., Мальцев В. В.
МПК: B25D 9/12
Метки: гидравлический, механизм, ударный
Текст:
...с обрабатываемым объектом. Гидравлический ударный механизм работает следующим образом. При-отсутствии нажатия со стороны рабочего инструмента 22 подвижные элементы устройства находятся в исходном положении. Рабочая жидкость по напорному каналу 11 от насоса поступает вкамеру рабочего хода В и по каналу 15 в камеру управления 8. удерживая ступенчатый распределитель 4 в крайнем верхнем положении. По осевому 9 и радиальному 1.0...
Машина Голубева В. И.
Номер патента: 14
Опубликовано: 30.05.1994
Автор: Голубев В. И.
МПК: F01C 9/00
Текст:
...рабочим орга- тонон в режиме двигателя работает следующим образом.Рабочее тело подается в коллектор,объединяющий все каналы 8, находящие ся с одной стороны вдоль рабочих ка- 15мер Б. отводится рабочее тело из каналов 9 в отводящий коллектор (не показан). При этом под давлением рабочего тела рабочие камеры 6, подклю ченные к каналам 8, начинают двигать-дася относительно перемычек 16 и приводят в движение рабочий орган Ц, связанный с...
Предыдущий патент: Способ автоматического управления параллельно работающими сушильными агрегатами
Следующий патент: Способ изготовления витых изделий
Случайный патент: Приспособление к зажиму для проведения цилиндрических обтураторов в сложные свищевые ходы