Эксцентриковый ловитель для грузоподъемных механизмов
Номер патента: U 6431
Опубликовано: 30.08.2010
Авторы: Романюк Николай Николаевич, Сашко Константин Владимирович, Вольский Александр Леонидович, Гришан Константин Юрьевич

Текст
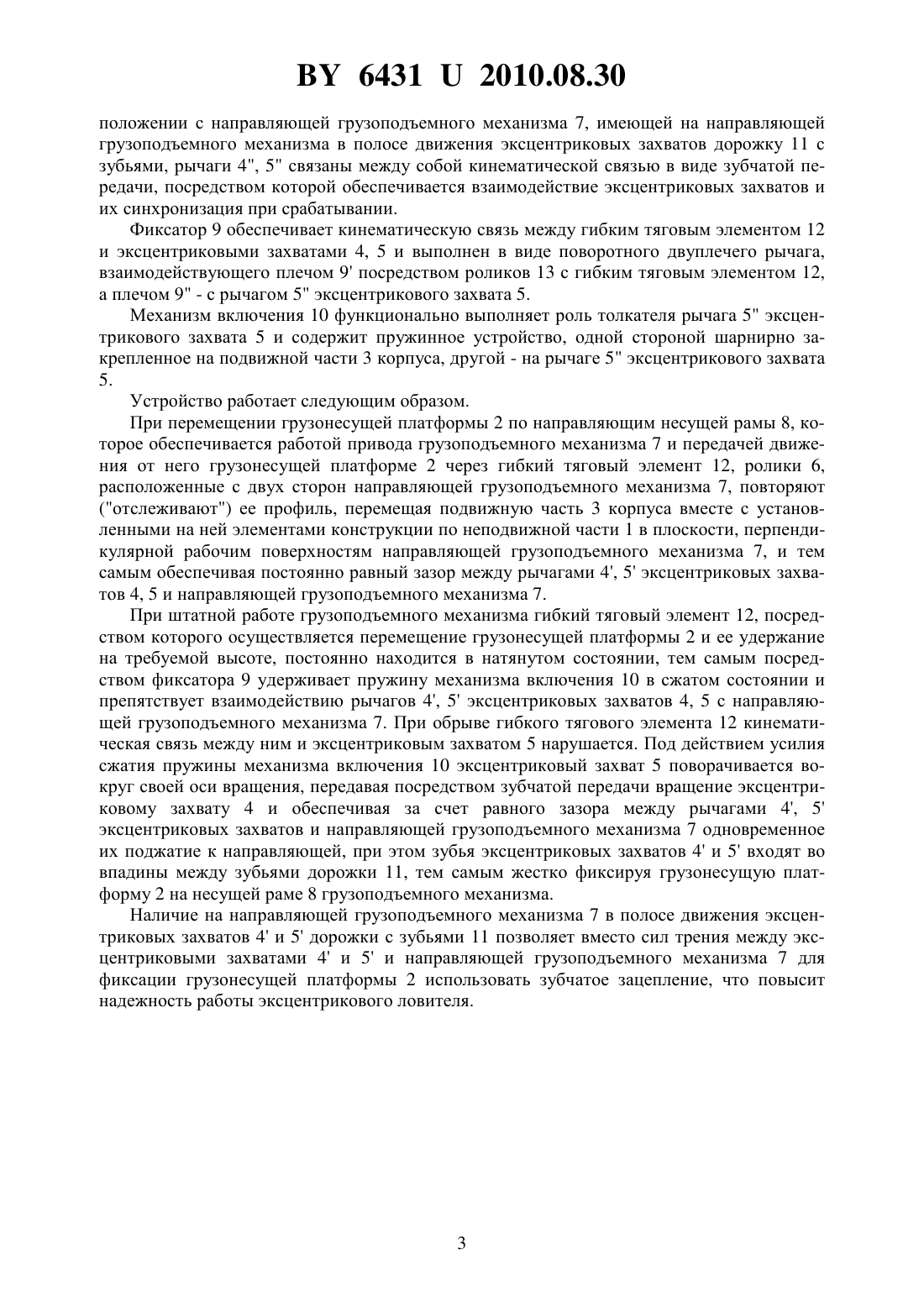
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Сашко Константин Владимирович Романюк Николай Николаевич Вольский Александр Леонидович Гришан Константин Юрьевич(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) Эксцентриковый ловитель для грузоподъемных механизмов, содержащий связанные между собой кинематической связью в виде зубчатой передачи эксцентриковые захваты,имеющие зубья на периферийной части для взаимодействия в рабочем положении с направляющей грузоподъемного механизма, фиксатор, взаимодействующий с гибким тяговым элементом посредством двух роликов, механизм включения, содержащий пружинное устройство, снабженное автономным корпусом, состоящим из неподвижной части,закрепленной на раме грузонесущей платформы и перемещаемой по ней в плоскости, перпендикулярной рабочим поверхностям, направляющей грузоподъемного механизма, подвижной части, на которой установлены ролики, взаимодействующие с направляющей грузоподъемного механизма, отличающийся тем, что дополнительно на направляющей грузоподъемного механизма в полосе движения эксцентриковых захватов имеется дорожка с зубьями.(56) 1. Патент РФ на изобретение 2329940, МПК 66 5/20, 2008. Полезная модель относится к подъемно-транспортному машиностроению, в частности к грузоподъемным механизмам. Известен эксцентриковый ловитель для грузоподъемных механизмов 1, содержащий связанные между собой кинематической связью в виде зубчатой передачи эксцентриковые захваты, имеющие зубья на периферийной части для взаимодействия в рабочем положении с направляющей грузоподъемного механизма, фиксатор, взаимодействующий с гибким тяговым элементом посредством двух роликов, механизм включения, содержащий пружинное устройство, снабженное автономным корпусом, состоящим из неподвижной части, закрепленной на раме грузонесущей платформы и перемещаемой по ней в плоскости, перпендикулярной рабочим поверхностям, направляющей грузоподъемного механизма, подвижной части, на которой установлены ролики, взаимодействующие с направляющей грузоподъемного механизма. Недостатком описанного устройства является невысокая надежность фиксации грузонесущей платформы на направляющей грузоподъемного механизма, так как она удерживается только за счет сил трения между эксцентриковыми захватами и направляющей грузоподъемного механизма. Задачей полезной модели является повышение надежности работы эксцентрикового ловителя. Поставленная задача достигается тем, что эксцентриковый ловитель для грузоподъемных механизмов, содержащий связанные между собой кинематической связью в виде зубчатой передачи эксцентриковые захваты, имеющие зубья на периферийной части для взаимодействия в рабочем положении с направляющей грузоподъемного механизма, фиксатор, взаимодействующий с гибким тяговым элементом посредством двух роликов, механизм включения, содержащий пружинное устройство, снабженное автономным корпусом, состоящим из неподвижной части, закрепленной на раме грузонесущей платформы и перемещаемой по ней в плоскости, перпендикулярной рабочим поверхностям,направляющей грузоподъемного механизма, подвижной части, на которой установлены ролики, взаимодействующие с направляющей грузоподъемного механизма, где дополнительно на направляющей грузоподъемного механизма в полосе движения эксцентриковых захватов имеется дорожка с зубьями. Наличие на направляющей грузоподъемного механизма в полосе движения эксцентриковых захватов дорожки с зубьями позволяет вместо сил трения между эксцентриковыми захватами и направляющей грузоподъемного механизма для фиксации грузонесущей платформы использовать зубчатое зацепление, что повысит надежность работы эксцентрикового ловителя. На фиг. 1 изображен эксцентриковый ловитель, вид сбоку, на фиг. 2 - вид эксцентрикового ловителя по стрелке А, на фиг. 3 изображено сечение Б-Б, на фиг. 4 - вид эксцентрикового ловителя по стрелке В. Устройство включает в себя автономный корпус, состоящий из неподвижной части 1,закрепленной на раме грузонесущей платформы 2, и подвижной части 3, имеющей возможность перемещения вдоль неподвижной части. Подвижная часть 3 корпуса снабжена двумя эксцентриковыми захватами 4 и 5, четырьмя роликами 6, взаимодействующими с направляющей грузоподъемного механизма 7, закрепленной на несущей раме 8 грузоподъемного механизма, фиксатором 9 и механизмом включения 10. Каждый эксцентриковый захват 4 и 5 выполнен в виде двух рычагов, расположенных в параллельных плоскостях и имеющих общую ось вращения. Рычаги 4, 5 выполнены в виде эксцентриков, имеющих зубья на периферийной части для взаимодействия в рабочем 2 64312010.08.30 положении с направляющей грузоподъемного механизма 7, имеющей на направляющей грузоподъемного механизма в полосе движения эксцентриковых захватов дорожку 11 с зубьями, рычаги 4, 5 связаны между собой кинематической связью в виде зубчатой передачи, посредством которой обеспечивается взаимодействие эксцентриковых захватов и их синхронизация при срабатывании. Фиксатор 9 обеспечивает кинематическую связь между гибким тяговым элементом 12 и эксцентриковыми захватами 4, 5 и выполнен в виде поворотного двуплечего рычага,взаимодействующего плечом 9 посредством роликов 13 с гибким тяговым элементом 12,а плечом 9 - с рычагом 5 эксцентрикового захвата 5. Механизм включения 10 функционально выполняет роль толкателя рычага 5 эксцентрикового захвата 5 и содержит пружинное устройство, одной стороной шарнирно закрепленное на подвижной части 3 корпуса, другой - на рычаге 5 эксцентрикового захвата 5. Устройство работает следующим образом. При перемещении грузонесущей платформы 2 по направляющим несущей рамы 8, которое обеспечивается работой привода грузоподъемного механизма 7 и передачей движения от него грузонесущей платформе 2 через гибкий тяговый элемент 12, ролики 6,расположенные с двух сторон направляющей грузоподъемного механизма 7, повторяют(отслеживают) ее профиль, перемещая подвижную часть 3 корпуса вместе с установленными на ней элементами конструкции по неподвижной части 1 в плоскости, перпендикулярной рабочим поверхностям направляющей грузоподъемного механизма 7, и тем самым обеспечивая постоянно равный зазор между рычагами 4, 5 эксцентриковых захватов 4, 5 и направляющей грузоподъемного механизма 7. При штатной работе грузоподъемного механизма гибкий тяговый элемент 12, посредством которого осуществляется перемещение грузонесущей платформы 2 и ее удержание на требуемой высоте, постоянно находится в натянутом состоянии, тем самым посредством фиксатора 9 удерживает пружину механизма включения 10 в сжатом состоянии и препятствует взаимодействию рычагов 4, 5 эксцентриковых захватов 4, 5 с направляющей грузоподъемного механизма 7. При обрыве гибкого тягового элемента 12 кинематическая связь между ним и эксцентриковым захватом 5 нарушается. Под действием усилия сжатия пружины механизма включения 10 эксцентриковый захват 5 поворачивается вокруг своей оси вращения, передавая посредством зубчатой передачи вращение эксцентриковому захвату 4 и обеспечивая за счет равного зазора между рычагами 4, 5 эксцентриковых захватов и направляющей грузоподъемного механизма 7 одновременное их поджатие к направляющей, при этом зубья эксцентриковых захватов 4 и 5 входят во впадины между зубьями дорожки 11, тем самым жестко фиксируя грузонесущую платформу 2 на несущей раме 8 грузоподъемного механизма. Наличие на направляющей грузоподъемного механизма 7 в полосе движения эксцентриковых захватов 4 и 5 дорожки с зубьями 11 позволяет вместо сил трения между эксцентриковыми захватами 4 и 5 и направляющей грузоподъемного механизма 7 для фиксации грузонесущей платформы 2 использовать зубчатое зацепление, что повысит надежность работы эксцентрикового ловителя. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B66B 5/00
Метки: грузоподъемных, эксцентриковый, механизмов, ловитель
Код ссылки
<a href="https://by.patents.su/4-u6431-ekscentrikovyjj-lovitel-dlya-gruzopodemnyh-mehanizmov.html" rel="bookmark" title="База патентов Беларуси">Эксцентриковый ловитель для грузоподъемных механизмов</a>
Жатка для зерновых культур
Номер патента: U 3703
Опубликовано: 30.06.2007
Авторы: Савков Михаил Александрович, Камко Александр Иванович, Левочкин Владимир Иванович, Волков Иван Васильевич, Меженников Александр Павлович, Дюжев Андрей Анисимович
МПК: A01D 34/00
Метки: культур, жатка, зерновых
Текст:
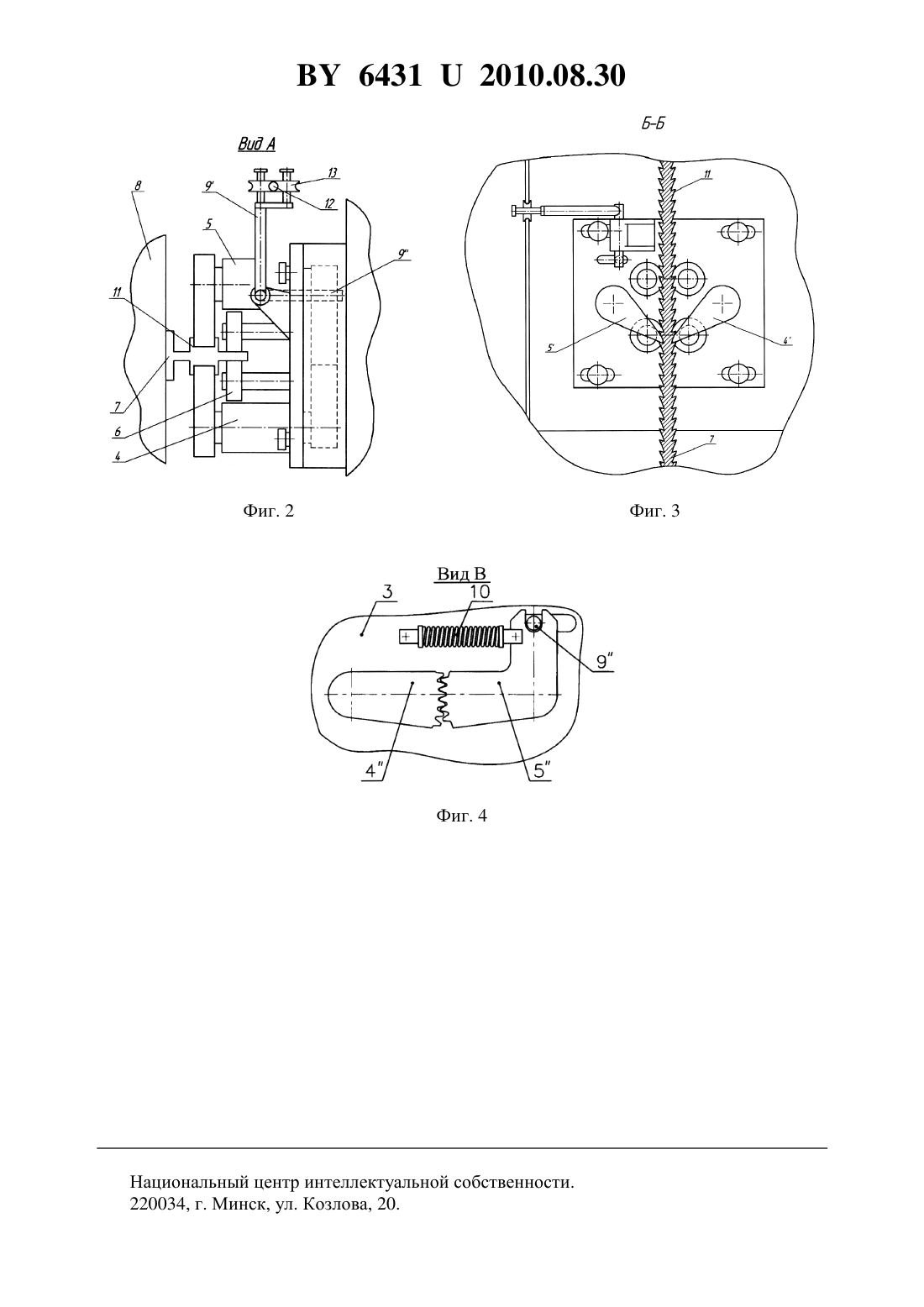
...итоге ухудшает эксплуатационные характеристики жатки. Техническая задача, решаемая полезной моделью, - улучшение эксплуатационных характеристик за счет повышения качества выполнения технологического процесса. Поставленная задача достигается тем, что в жатке для зерновых культур, содержащей раму, режущий аппарат и мотовило, включающее центральную трубу с фланцами, диски,закрепленные на фланцах, лучи, закрепленные на дисках, граблины с...
Способ измерения температуры деталей поршневых механизмов с кривошипным ползунным приводом
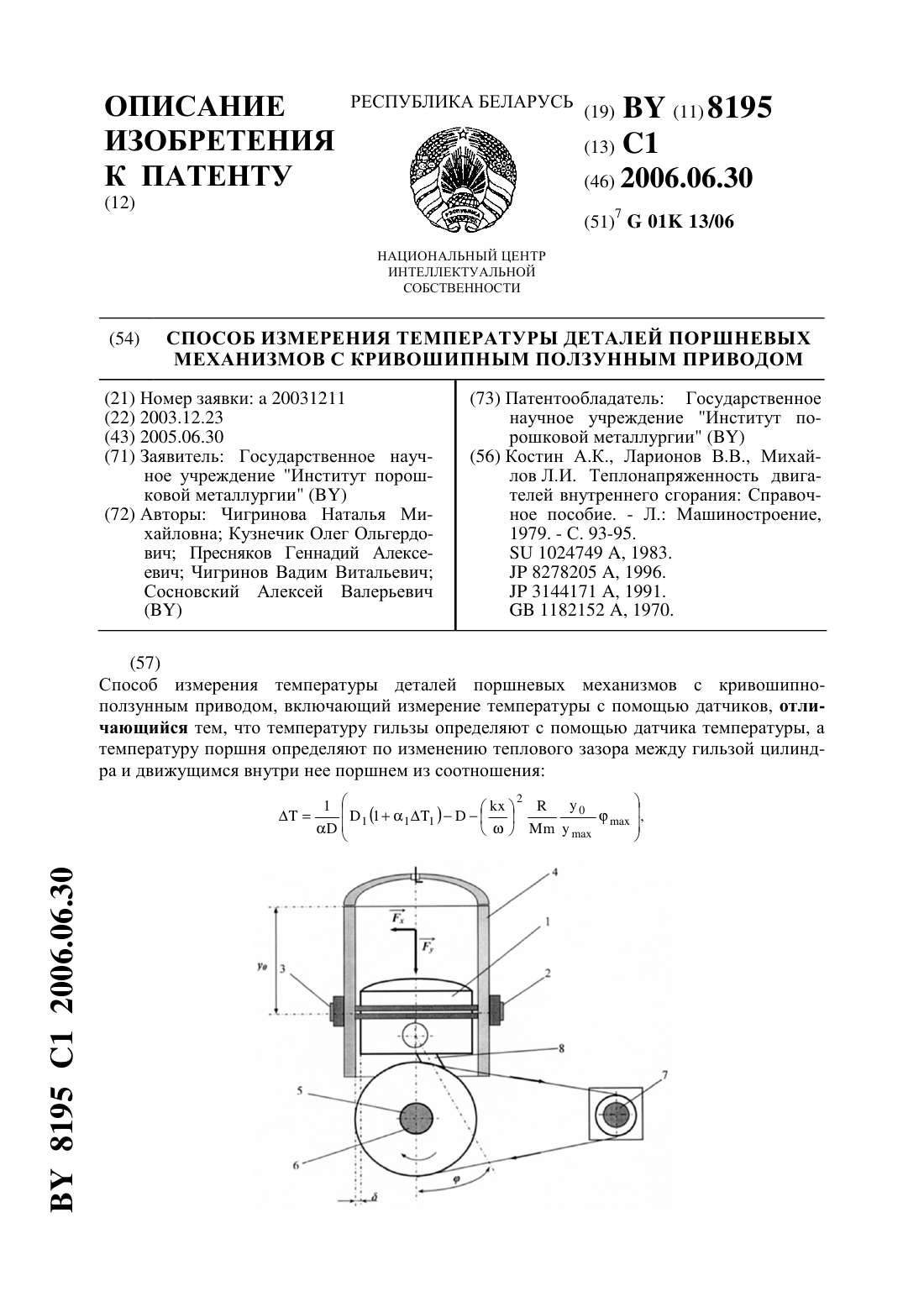
Номер патента: 8195
Опубликовано: 30.06.2006
Авторы: Чигринова Наталья Михайловна, Сосновский Алексей Валерьевич, Чигринов Вадим Витальевич, Кузнечик Олег Ольгердович, Пресняков Геннадий Алексеевич
МПК: G01K 13/06
Метки: кривошипным, механизмов, приводом, температуры, поршневых, ползунным, деталей, измерения, способ
Текст:
...вала М - крутящий момент основного вала- масса гильзы цилиндра у 0 - расстояние между верхней мертвой точкой и точкой установки вибродатчика- расстояние между верхней мертвой и нижней мертвой точками цилиндра поршневого механизма- угол максимального отклонения шатуна от начального положения при движении поршня от верхней мертвой точки к нижней мертвой точке. На чертеже представлена схема реализации предлагаемого способа измерения...
Устройство для обработки вибрационных сигналов при динамических испытаниях конструкций и диагностике механизмов с вращательным движением
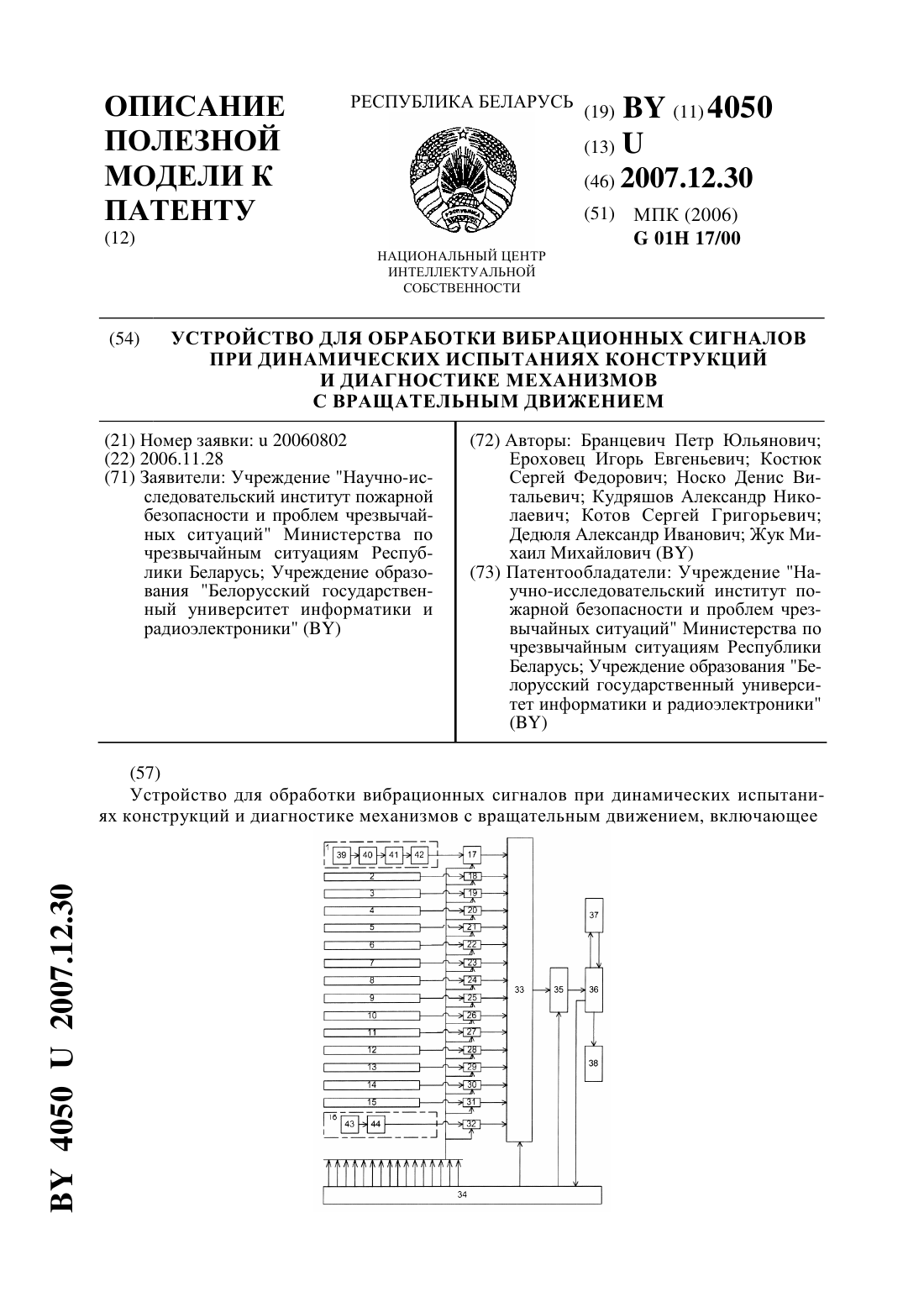
Номер патента: U 4050
Опубликовано: 30.12.2007
Авторы: Бранцевич Петр Юльянович, Ероховец Игорь Евгеньевич, Дедюля Александр Иванович, Жук Михаил Михайлович, Носко Денис Витальевич, Костюк Сергей Федорович, Кудряшов Александр Николаевич, Котов Сергей Григорьевич
МПК: G01H 17/00
Метки: обработки, конструкций, движением, динамических, сигналов, вращательным, устройство, вибрационных, механизмов, диагностике, испытаниях
Текст:
...первого аналогоцифрового преобразователя, вторые вход и выход контроллера связаны с соответствующими выходом и вторым входом второго аналого-цифрового преобразователя, третий и четвертый выходы контроллера связаны с соответствующими вторыми входами первого и второго регулируемых усилителей, пятый выход контроллера связан со вторым входом регулируемого фильтра низкой частоты, третий вход и шестой выход контроллера связаны соответственно с...
Асинхронный электродвигатель для регулируемого привода машин и механизмов
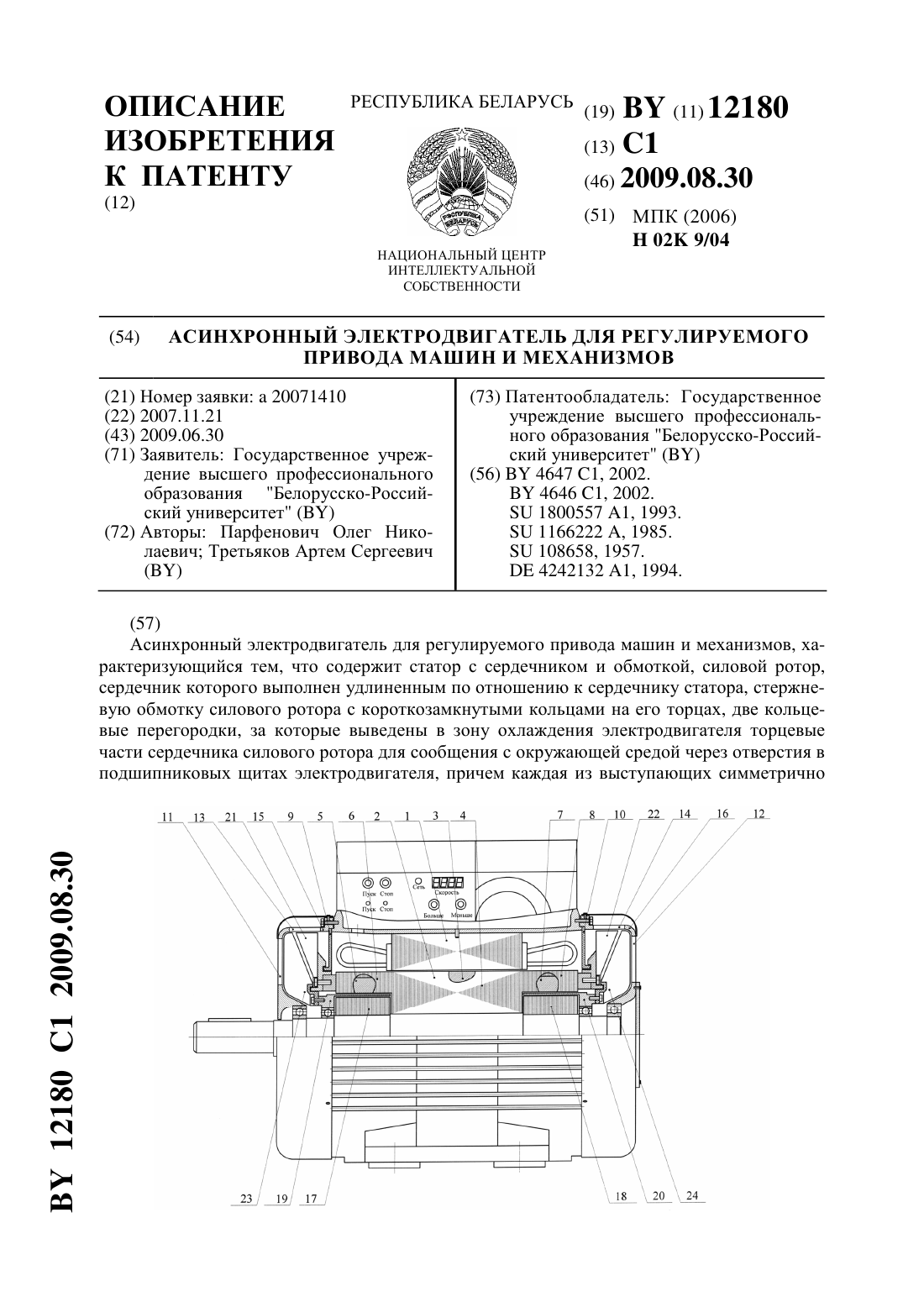
Номер патента: 12180
Опубликовано: 30.08.2009
Авторы: Парфенович Олег Николаевич, Третьяков Артем Сергеевич
МПК: H02K 9/04
Метки: регулируемого, машин, электродвигатель, привода, механизмов, асинхронный
Текст:
...По данным исследования 3 электродвигатель имеет улучшенные энергетические показатели ( , ), допустимый по условиям нагрева момент в заторможенном режиме кВт(0,25-0,3)Мн, более высокую массогабаритную мощность (0,10,13)кг Недостатками данного электродвигателя являются относительно худшие условия отвода из ротора греющих потерь и охлаждение в его торцевой части, расположенной со стороны выступающего конца вала ротора, передающего вращающий...
Способ выявления патогенетических механизмов неврологической симптоматики при патологической подвижности позвонков и компрессии дурального мешка спинного мозга в поясничном отделе позвоночника
Номер патента: 8707
Опубликовано: 30.12.2006
Авторы: Лихачев Сергей Алексеевич, Булаев Игорь Васильевич, Сакович Руслан Антонович, Еленская Светлана Владимировна
Метки: механизмов, патогенетических, компрессии, отделе, позвоночника, неврологической, патологической, спинного, симптоматики, выявления, поясничном, позвонков, подвижности, мозга, способ, мешка, дурального
Текст:
...отдела позвоночника проводят сначала при выпрямленном положении позвоночника при положении больного лежа на спине. а затем при максимальном разгибании поясничного отдела позвоночника. которого добиваются путем подкладывания валика диаметром до 4 0 см. и при сравнении полученных томограмм выявляют патогенетические механизмы неврологической симптоматики при патологической подвижности позвонков и компрессии дурального мещка спинного...
Предыдущий патент: Мелководный гидроэлектрогенератор
Следующий патент: Устройство для очистки поверхности трубопровода
Случайный патент: Комплект переносного заземления для воздушных линий электропередачи