Приспособление для натяжения гибкого тягового органа подъемника
Текст
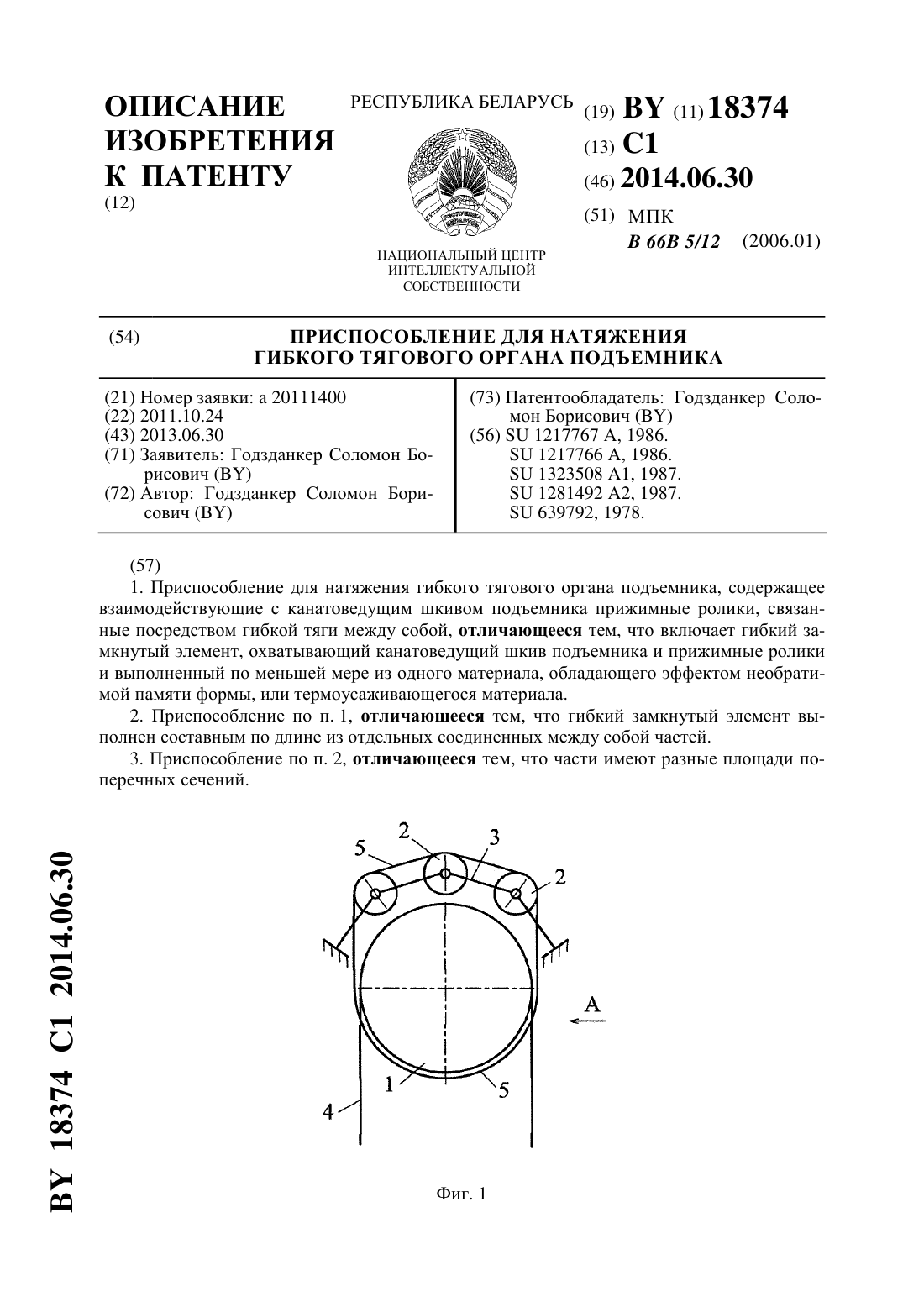
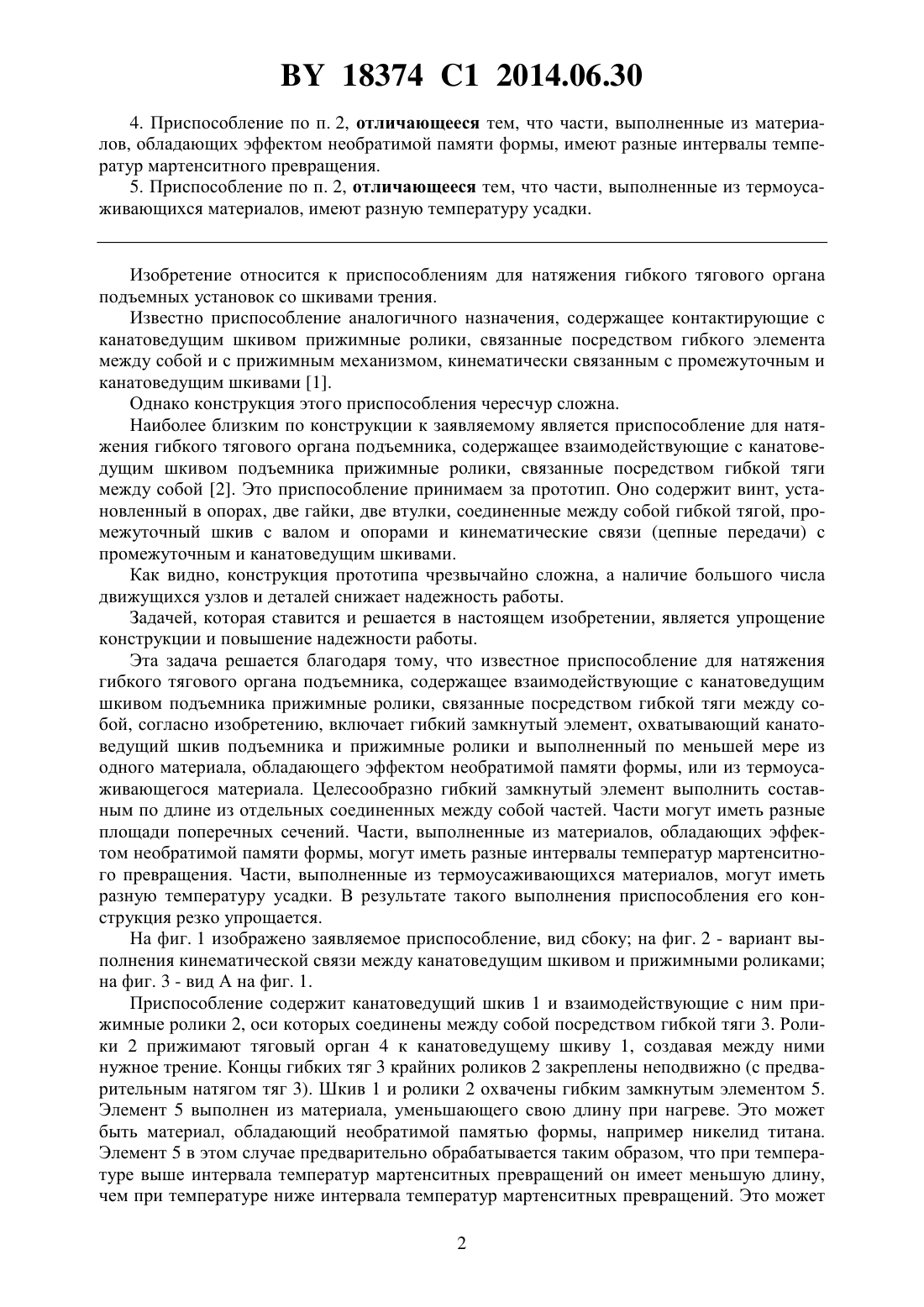
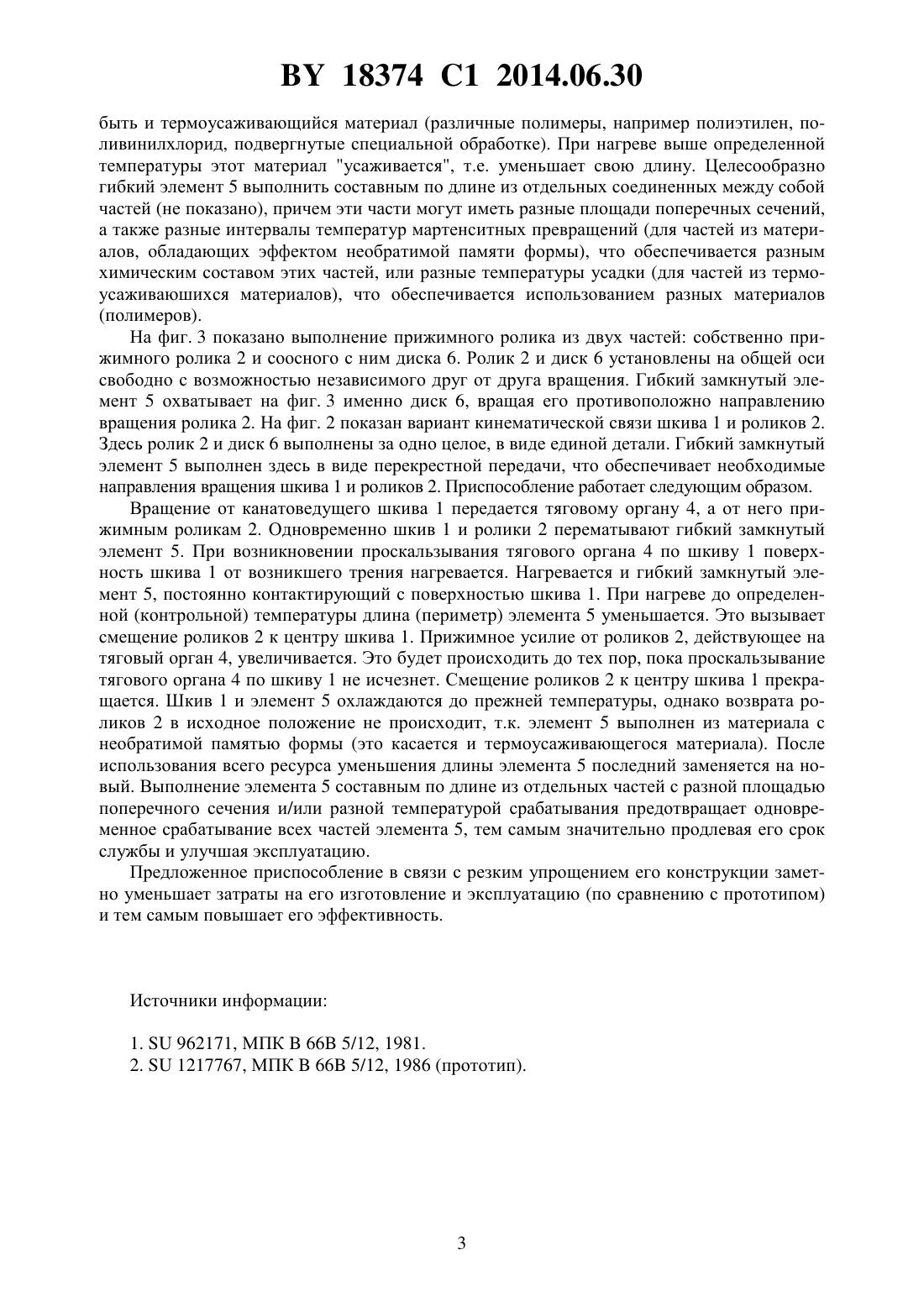
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ПРИСПОСОБЛЕНИЕ ДЛЯ НАТЯЖЕНИЯ ГИБКОГО ТЯГОВОГО ОРГАНА ПОДЪЕМНИКА(71) Заявитель Годзданкер Соломон Борисович(72) Автор Годзданкер Соломон Борисович(73) Патентообладатель Годзданкер Соломон Борисович(57) 1. Приспособление для натяжения гибкого тягового органа подъемника, содержащее взаимодействующие с канатоведущим шкивом подъемника прижимные ролики, связанные посредством гибкой тяги между собой, отличающееся тем, что включает гибкий замкнутый элемент, охватывающий канатоведущий шкив подъемника и прижимные ролики и выполненный по меньшей мере из одного материала, обладающего эффектом необратимой памяти формы, или термоусаживающегося материала. 2. Приспособление по п. 1, отличающееся тем, что гибкий замкнутый элемент выполнен составным по длине из отдельных соединенных между собой частей. 3. Приспособление по п. 2, отличающееся тем, что части имеют разные площади поперечных сечений. 18374 1 2014.06.30 4. Приспособление по п. 2, отличающееся тем, что части, выполненные из материалов, обладающих эффектом необратимой памяти формы, имеют разные интервалы температур мартенситного превращения. 5. Приспособление по п. 2, отличающееся тем, что части, выполненные из термоусаживающихся материалов, имеют разную температуру усадки. Изобретение относится к приспособлениям для натяжения гибкого тягового органа подъемных установок со шкивами трения. Известно приспособление аналогичного назначения, содержащее контактирующие с канатоведущим шкивом прижимные ролики, связанные посредством гибкого элемента между собой и с прижимным механизмом, кинематически связанным с промежуточным и канатоведущим шкивами 1. Однако конструкция этого приспособления чересчур сложна. Наиболее близким по конструкции к заявляемому является приспособление для натяжения гибкого тягового органа подъемника, содержащее взаимодействующие с канатоведущим шкивом подъемника прижимные ролики, связанные посредством гибкой тяги между собой 2. Это приспособление принимаем за прототип. Оно содержит винт, установленный в опорах, две гайки, две втулки, соединенные между собой гибкой тягой, промежуточный шкив с валом и опорами и кинематические связи (цепные передачи) с промежуточным и канатоведущим шкивами. Как видно, конструкция прототипа чрезвычайно сложна, а наличие большого числа движущихся узлов и деталей снижает надежность работы. Задачей, которая ставится и решается в настоящем изобретении, является упрощение конструкции и повышение надежности работы. Эта задача решается благодаря тому, что известное приспособление для натяжения гибкого тягового органа подъемника, содержащее взаимодействующие с канатоведущим шкивом подъемника прижимные ролики, связанные посредством гибкой тяги между собой, согласно изобретению, включает гибкий замкнутый элемент, охватывающий канатоведущий шкив подъемника и прижимные ролики и выполненный по меньшей мере из одного материала, обладающего эффектом необратимой памяти формы, или из термоусаживающегося материала. Целесообразно гибкий замкнутый элемент выполнить составным по длине из отдельных соединенных между собой частей. Части могут иметь разные площади поперечных сечений. Части, выполненные из материалов, обладающих эффектом необратимой памяти формы, могут иметь разные интервалы температур мартенситного превращения. Части, выполненные из термоусаживающихся материалов, могут иметь разную температуру усадки. В результате такого выполнения приспособления его конструкция резко упрощается. На фиг. 1 изображено заявляемое приспособление, вид сбоку на фиг. 2 - вариант выполнения кинематической связи между канатоведущим шкивом и прижимными роликами на фиг. 3 - вид А на фиг. 1. Приспособление содержит канатоведущий шкив 1 и взаимодействующие с ним прижимные ролики 2, оси которых соединены между собой посредством гибкой тяги 3. Ролики 2 прижимают тяговый орган 4 к канатоведущему шкиву 1, создавая между ними нужное трение. Концы гибких тяг 3 крайних роликов 2 закреплены неподвижно (с предварительным натягом тяг 3). Шкив 1 и ролики 2 охвачены гибким замкнутым элементом 5. Элемент 5 выполнен из материала, уменьшающего свою длину при нагреве. Это может быть материал, обладающий необратимой памятью формы, например никелид титана. Элемент 5 в этом случае предварительно обрабатывается таким образом, что при температуре выше интервала температур мартенситных превращений он имеет меньшую длину,чем при температуре ниже интервала температур мартенситных превращений. Это может 2 18374 1 2014.06.30 быть и термоусаживающийся материал (различные полимеры, например полиэтилен, поливинилхлорид, подвергнутые специальной обработке). При нагреве выше определенной температуры этот материал усаживается, т.е. уменьшает свою длину. Целесообразно гибкий элемент 5 выполнить составным по длине из отдельных соединенных между собой частей (не показано), причем эти части могут иметь разные площади поперечных сечений,а также разные интервалы температур мартенситных превращений (для частей из материалов, обладающих эффектом необратимой памяти формы), что обеспечивается разным химическим составом этих частей, или разные температуры усадки (для частей из термоусаживаюшихся материалов), что обеспечивается использованием разных материалов(полимеров). На фиг. 3 показано выполнение прижимного ролика из двух частей собственно прижимного ролика 2 и соосного с ним диска 6. Ролик 2 и диск 6 установлены на общей оси свободно с возможностью независимого друг от друга вращения. Гибкий замкнутый элемент 5 охватывает на фиг. 3 именно диск 6, вращая его противоположно направлению вращения ролика 2. На фиг. 2 показан вариант кинематической связи шкива 1 и роликов 2. Здесь ролик 2 и диск 6 выполнены за одно целое, в виде единой детали. Гибкий замкнутый элемент 5 выполнен здесь в виде перекрестной передачи, что обеспечивает необходимые направления вращения шкива 1 и роликов 2. Приспособление работает следующим образом. Вращение от канатоведущего шкива 1 передается тяговому органу 4, а от него прижимным роликам 2. Одновременно шкив 1 и ролики 2 перематывают гибкий замкнутый элемент 5. При возникновении проскальзывания тягового органа 4 по шкиву 1 поверхность шкива 1 от возникшего трения нагревается. Нагревается и гибкий замкнутый элемент 5, постоянно контактирующий с поверхностью шкива 1. При нагреве до определенной (контрольной) температуры длина (периметр) элемента 5 уменьшается. Это вызывает смещение роликов 2 к центру шкива 1. Прижимное усилие от роликов 2, действующее на тяговый орган 4, увеличивается. Это будет происходить до тех пор, пока проскальзывание тягового органа 4 по шкиву 1 не исчезнет. Смещение роликов 2 к центру шкива 1 прекращается. Шкив 1 и элемент 5 охлаждаются до прежней температуры, однако возврата роликов 2 в исходное положение не происходит, т.к. элемент 5 выполнен из материала с необратимой памятью формы (это касается и термоусаживающегося материала). После использования всего ресурса уменьшения длины элемента 5 последний заменяется на новый. Выполнение элемента 5 составным по длине из отдельных частей с разной площадью поперечного сечения и/или разной температурой срабатывания предотвращает одновременное срабатывание всех частей элемента 5, тем самым значительно продлевая его срок службы и улучшая эксплуатацию. Предложенное приспособление в связи с резким упрощением его конструкции заметно уменьшает затраты на его изготовление и эксплуатацию (по сравнению с прототипом) и тем самым повышает его эффективность. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B66B 5/12
Метки: тягового, гибкого, приспособление, натяжения, органа, подъемника
Код ссылки
<a href="https://by.patents.su/4-18374-prisposoblenie-dlya-natyazheniya-gibkogo-tyagovogo-organa-podemnika.html" rel="bookmark" title="База патентов Беларуси">Приспособление для натяжения гибкого тягового органа подъемника</a>
Устройство для улавливания тягового органа элеватора при его обрыве
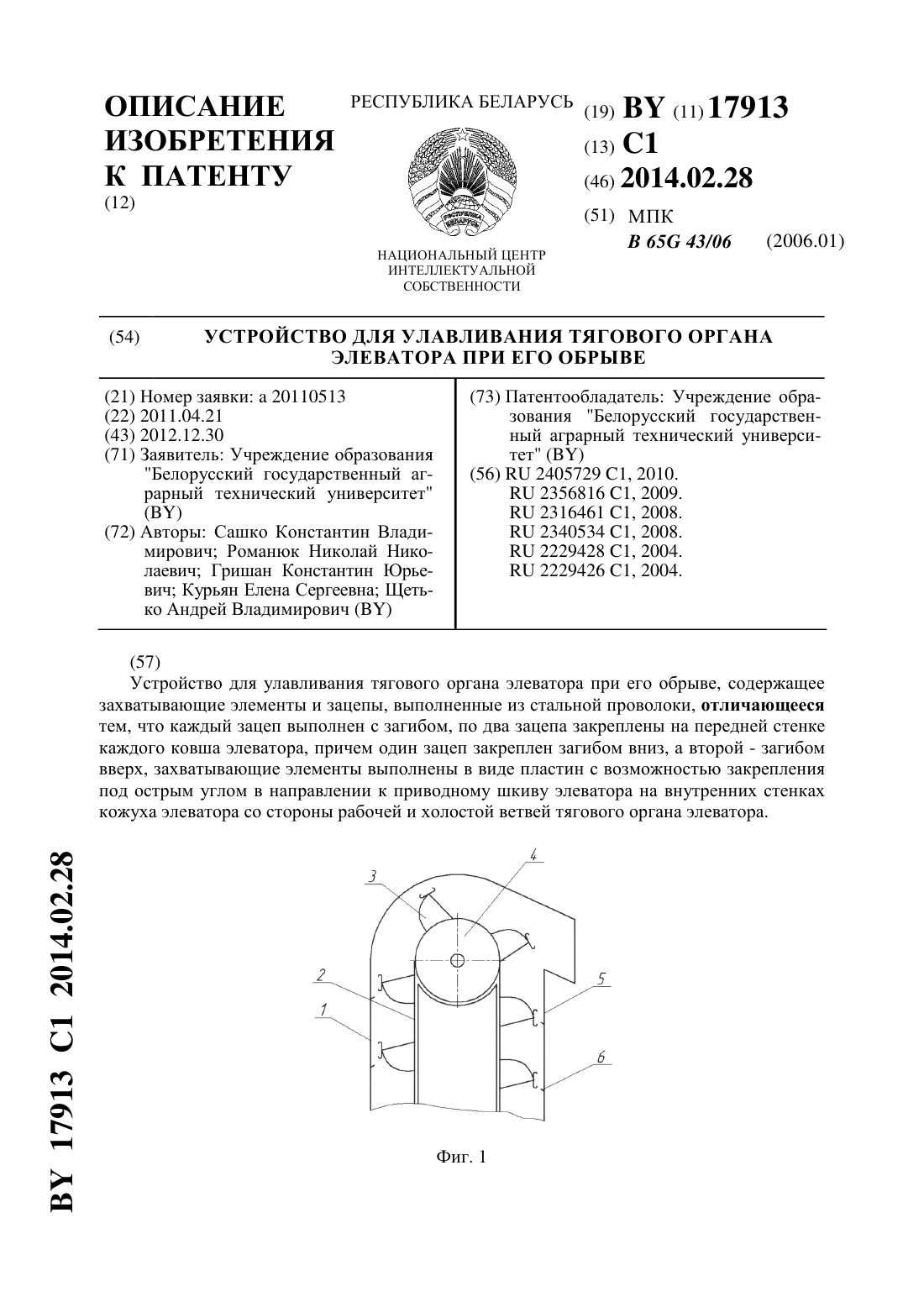
Номер патента: 17913
Опубликовано: 28.02.2014
Авторы: Сашко Константин Владимирович, Гришан Константин Юрьевич, Курьян Елена Сергеевна, Щетько Андрей Владимирович, Романюк Николай Николаевич
МПК: B65G 43/06
Метки: улавливания, органа, элеватора, обрыве, тягового, устройство
Текст:
...стальной проволоки, где каждый зацеп выполнен с загибом, по два зацепа закреплены на передней стенке каждого ковша элеватора, причем один зацеп закреплен загибом вниз, а второй - загибом вверх, захватывающие элементы выполнены в виде пластин с возможностью закрепления под острым углом в направлении к приводному шкиву элеватора на внутренних стенках кожуха элеватора со стороны рабочей и холостой ветвей тягового органа элеватора. Технический...
Устройство для улавливания тягового органа элеватора при его обрыве

Номер патента: U 7699
Опубликовано: 30.10.2011
Авторы: Гришан Константин Юрьевич, Курьян Елена Сергеевна, Романюк Николай Николаевич, Щетько Андрей Владимирович, Сашко Константин Владимирович
МПК: B65G 43/06
Метки: улавливания, обрыве, органа, тягового, элеватора, устройство
Текст:
...кожух с передвигающейся в нем лентой с ковшами, огибающими приводной шкив, захватывающий элемент, зацепы, выполненные из стальной прочной проволоки, зацепы закреплены на каждой половине передней стенки ковша, причем один зацеп имеет загиб вниз, а второй - вверх, а в верхней части, на внутренних стенках кожухов рабочей и холостой ветвей, закреплены захватывающие элементы, представляющие собой пластины, установленные с углом наклона,...
Устройство для контроля проскальзывания каната подъёмника
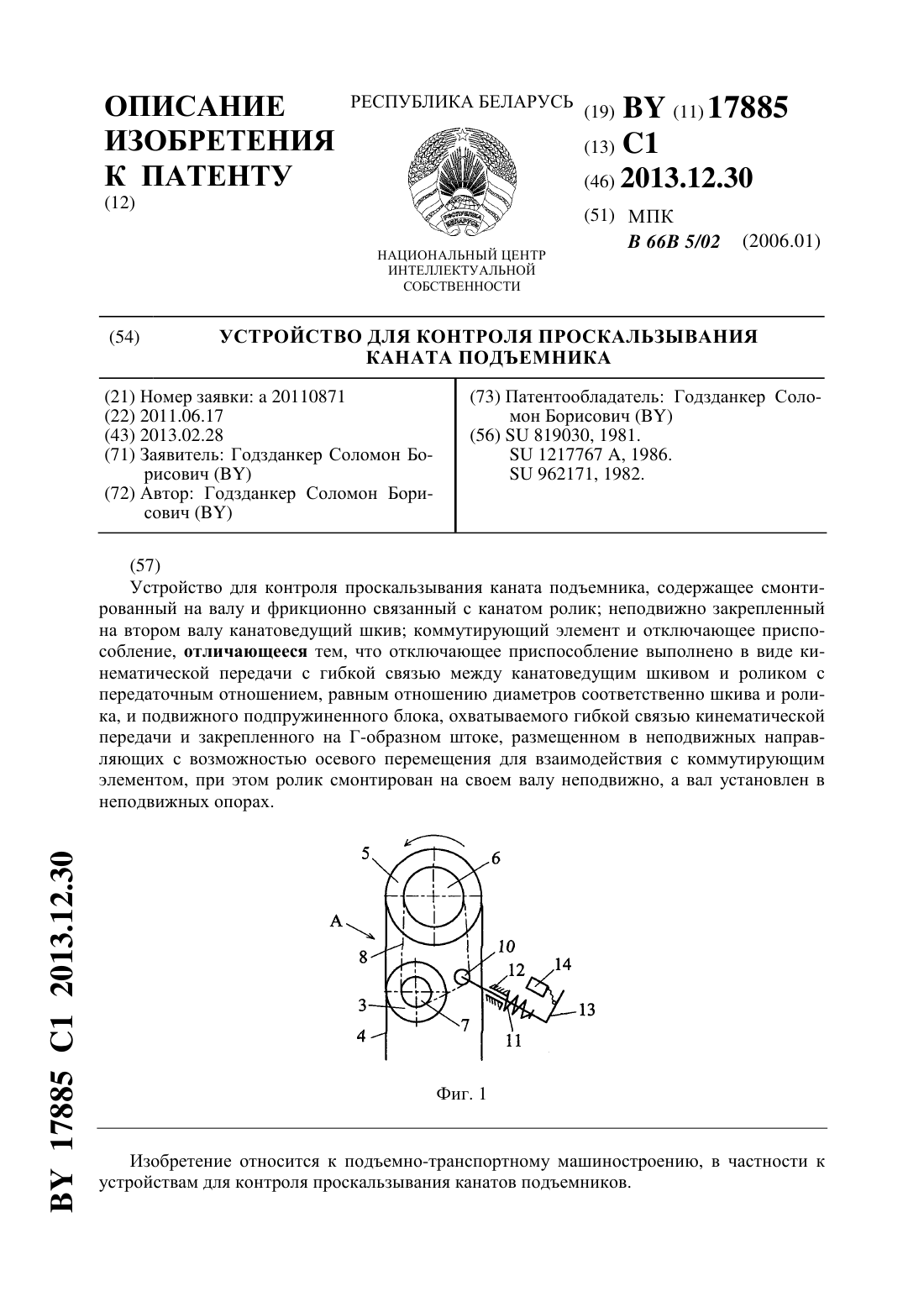
Номер патента: 17885
Опубликовано: 30.12.2013
Автор: Годзданкер Соломон Борисович
МПК: B66B 5/02
Метки: устройство, проскальзывания, подъёмника, каната, контроля
Текст:
...элемент и отключающее приспособление, согласно изобретению,отключающее приспособление выполнено в виде кинематической передачи с гибкой связью между канатоведущим шкивом и роликом с передаточным отношением, равным отношению диаметров соответственно шкива и ролика, и подвижного подпружиненного блока, охватываемого гибкой связью кинематической передачи и закрепленного на Г-образном штоке, размещенном в неподвижных направляющих с...
Устройство для измерения силы натяжения гибкого протяженного изделия круглого сечения
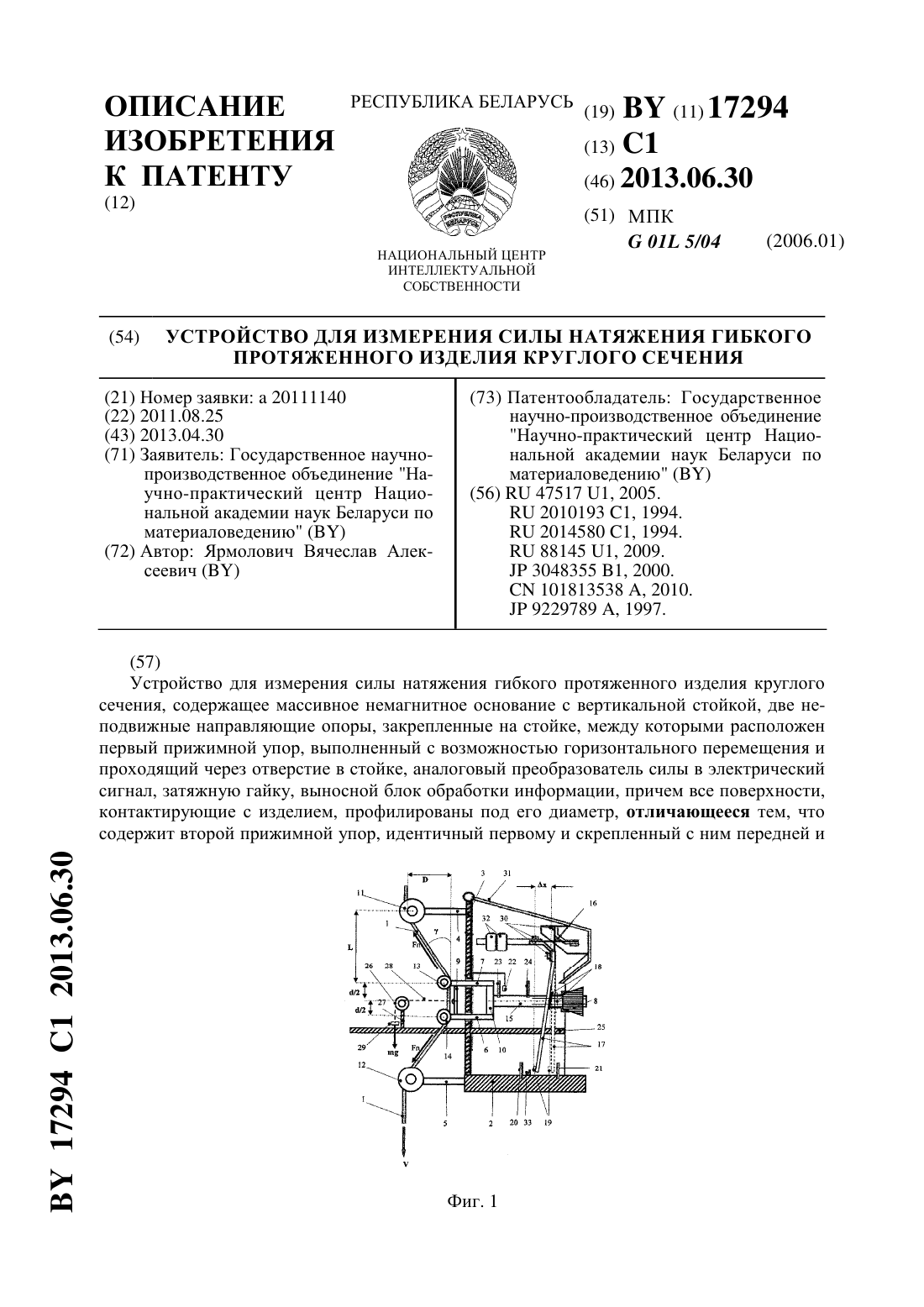
Номер патента: 17294
Опубликовано: 30.06.2013
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01L 5/04
Метки: натяжения, протяженного, изделия, силы, устройство, гибкого, круглого, сечения, измерения
Текст:
...в непосредственной близости от него, ориентированные одноименными полюсами навстречу друг другу вертикальная стойка снабжена горизонтальной пластиной с установленным на ней механизмом калибровки аналогового преобразователя силы,выполненного в виде ролика на подставке и невесомой нити с набором калибрующих грузов. По мнению авторов, устройство содержит вышеприведенный ряд новых элементов,позволяющих реализовать выполнение поставленной задачи по...
Устройство для контроля проскальзывания каната подъёмника по шкиву (варианты)
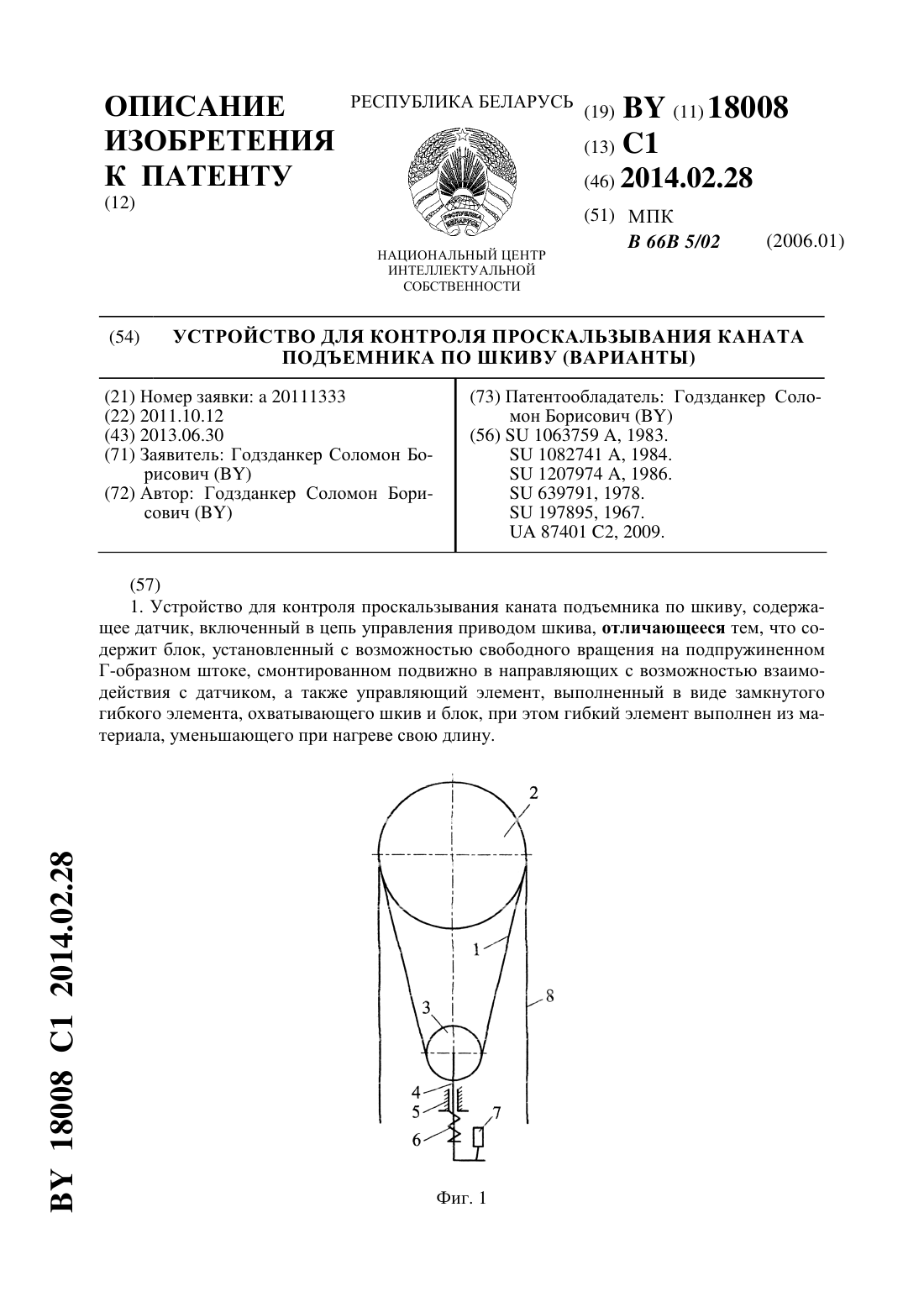
Номер патента: 18008
Опубликовано: 28.02.2014
Автор: Годзданкер Соломон Борисович
МПК: B66B 5/02
Метки: каната, проскальзывания, устройство, подъёмника, контроля, шкиву, варианты
Текст:
...из материала, обладающего свойством при нагреве до определенной (контрольной) температуры уменьшать свою длину (периметр). В качестве такого материала может быть использован материал, обладающий обратимой памятью формы, например никелид титана, или термоусаживающийся материал. Гибкий элемент 1 охватывает канатоведущий шкив 2 и блок 3, установленный с возможностью свободного вращения на Г-образном штоке 4, который подвижно смонтирован в...
Предыдущий патент: Передача с гибкой связью
Следующий патент: Привод ленточного конвейера
Случайный патент: Устройство для вычисления полиномиальных модулярных симметрических булевых функций n переменных