Способ определения дальности до объектов и их высот
Текст
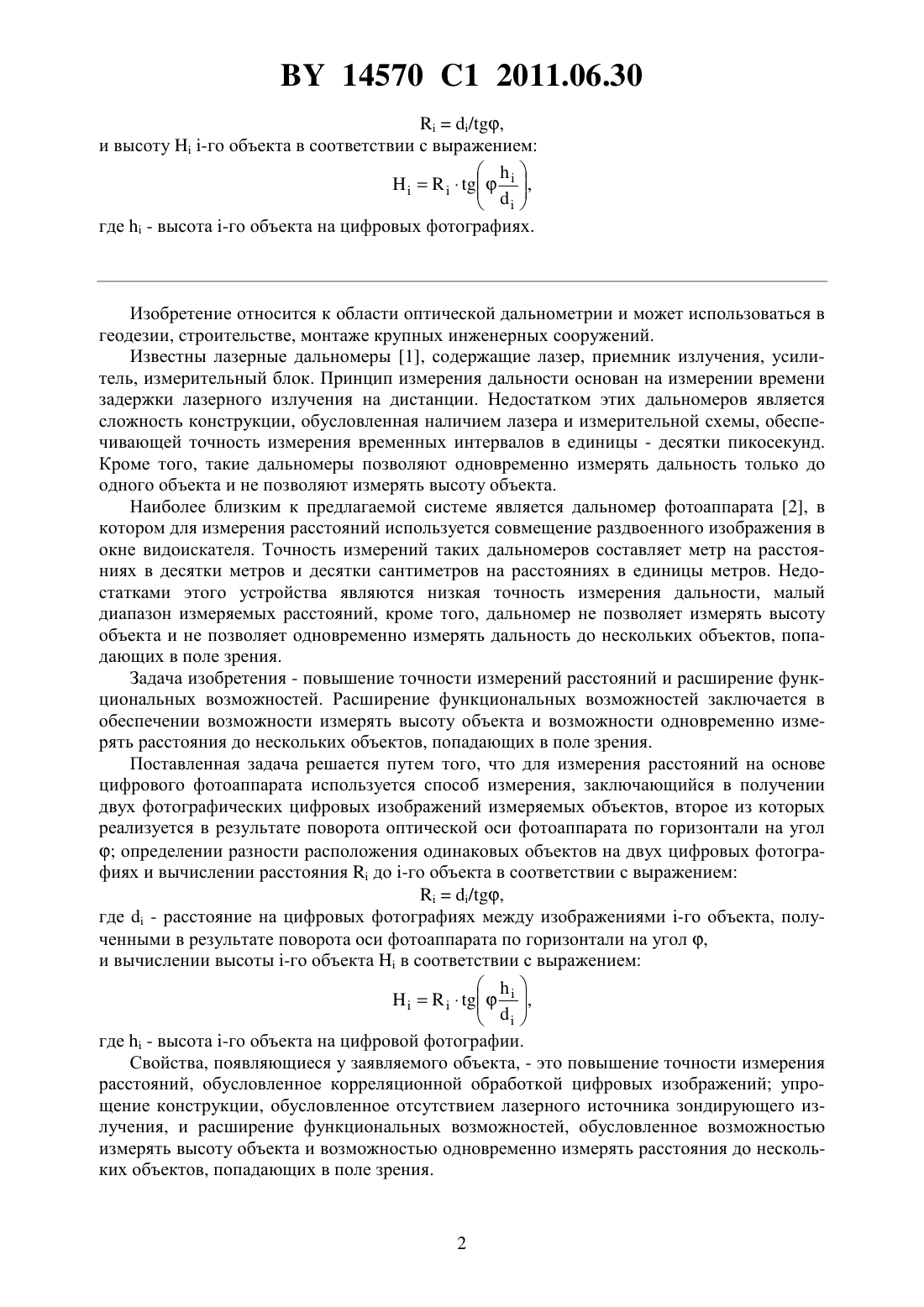
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТОВ И ИХ ВЫСОТ(71) Заявитель Белорусский государственный университет(72) Автор Козлов Владимир Леонидович(73) Патентообладатель Белорусский государственный университет(57) Способ определения дальности до объектов и их высот, при котором с помощью цифрового фотоаппарата получают первую цифровую фотографию исследуемых объектов,поворачивают оптическую ось объектива фотоаппарата по горизонтали на угол , выбранный из условия сохранения всех исследуемых объектов в поле зрения объектива после указанного поворота, получают вторую цифровую фотографию исследуемых объектов, определяют смещение-го объекта по разности расположения -го объекта на первой и второй цифровых фотографиях, определяют дальностьдо -го объекта в соответствии с выражением 14570 1 2011.06.30/,и высоту-го объекта в соответствии с выражением,где- высота -го объекта на цифровых фотографиях. Изобретение относится к области оптической дальнометрии и может использоваться в геодезии, строительстве, монтаже крупных инженерных сооружений. Известны лазерные дальномеры 1, содержащие лазер, приемник излучения, усилитель, измерительный блок. Принцип измерения дальности основан на измерении времени задержки лазерного излучения на дистанции. Недостатком этих дальномеров является сложность конструкции, обусловленная наличием лазера и измерительной схемы, обеспечивающей точность измерения временных интервалов в единицы - десятки пикосекунд. Кроме того, такие дальномеры позволяют одновременно измерять дальность только до одного объекта и не позволяют измерять высоту объекта. Наиболее близким к предлагаемой системе является дальномер фотоаппарата 2, в котором для измерения расстояний используется совмещение раздвоенного изображения в окне видоискателя. Точность измерений таких дальномеров составляет метр на расстояниях в десятки метров и десятки сантиметров на расстояниях в единицы метров. Недостатками этого устройства являются низкая точность измерения дальности, малый диапазон измеряемых расстояний, кроме того, дальномер не позволяет измерять высоту объекта и не позволяет одновременно измерять дальность до нескольких объектов, попадающих в поле зрения. Задача изобретения - повышение точности измерений расстояний и расширение функциональных возможностей. Расширение функциональных возможностей заключается в обеспечении возможности измерять высоту объекта и возможности одновременно измерять расстояния до нескольких объектов, попадающих в поле зрения. Поставленная задача решается путем того, что для измерения расстояний на основе цифрового фотоаппарата используется способ измерения, заключающийся в получении двух фотографических цифровых изображений измеряемых объектов, второе из которых реализуется в результате поворота оптической оси фотоаппарата по горизонтали на уголопределении разности расположения одинаковых объектов на двух цифровых фотографиях и вычислении расстояниядо -го объекта в соответствии с выражением/,где- расстояние на цифровых фотографиях между изображениями -го объекта, полученными в результате поворота оси фотоаппарата по горизонтали на угол ,и вычислении высоты -го объектав соответствии с выражением,где- высота -го объекта на цифровой фотографии. Свойства, появляющиеся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное корреляционной обработкой цифровых изображений упрощение конструкции, обусловленное отсутствием лазерного источника зондирующего излучения, и расширение функциональных возможностей, обусловленное возможностью измерять высоту объекта и возможностью одновременно измерять расстояния до нескольких объектов, попадающих в поле зрения. 14570 1 2011.06.30 Сущность способа измерений поясняется с помощью фигуры, на которой представлена функциональная схема измерителя расстояний на основе цифрового фотоаппарата. Система содержит цифровой фотоаппарат 1, блок поворота 2, вычислительный блок 3. Измеритель расстояний работает следующим образом. В начальный момент времени с помощью цифрового фотоаппарата реализуется цифровая фотография объектов, до которых измеряется дальность. Затем оптическая ось объектива фотоаппарата с помощью блока поворота 2 перемещается по горизонтали на угол , и производится повторное фотографирование измеряемых объектов. Уголвыбирается таким образом, чтобы при повороте все измеряемые объекты оставались в поле зрения объектива. Полученные два цифровых изображения одних и тех же объектов поступают в вычислительный блок, где производится измерение расстоянияна цифровой фотографии (фотоприемной матрице) между изображениями -го объекта, полученными в результате поворота оптической оси фотоаппарата по горизонтали на угол . На фигуре изображения объектов А, В, полученные в результате поворота, представлены штриховой линией. Из треугольников, зная уголи расстояния между объектами в результате поворота 1, 2, можно определить дальности до объектов следующим образом/. Измеритель расстояний также позволяет измерять высоту объектов. Это осуществляется следующим образом. Вычислительный блок определяет высоту объекта 1 на фотографии, т.е. размер объекта на цифровой фотографии (фигура). Зная вычисленное значение расстояния до объекта 1 и величину перемещения данного объекта 1 в результате поворота фотоаппарата по горизонтали на угол , реальную высоту объекта Н 1 определяют следующим образом 111 .1 Вычислительный блок с помощью корреляционной обработки осуществляет измерение расстояний между объектами 1 на цифровой фотографии, что фактически соответствует разности положений объектов на фотоприемной матрице фотоаппарата. Корреляционная обработка изображений позволяет определить положение объекта на матрице с точностью лучше одного чувствительного элемента (пикселя). Современные матрицы имеют количество чувствительных элементов более десяти миллионов, следовательно, относительная погрешность измерения положения объекта, а значит, и дальности будет не хуже 10-3. Знать точное значение расстояния между чувствительными элементами фотоприемной матрицы нет необходимости, так как его значение можно определить при калибровке системы на точно известном расстоянии. Блок поворота 2 должен обеспечивать соответствующую погрешность измерения угла поворота . В блоке поворота может использоваться как один точно известный угол поворота, так и несколько углов поворота, например, с использованием прецизионного шагового двигателя, управляемого микропроцессором вычислительного блока. При этом точное значение угла поворота можно также определить при калибровке системы на известном расстоянии. Предлагаемый способ измерения дальности является пассивным и основан на анализе изображений объектов, полученных в результате фотографирования. Предложенный пассивный метод обеспечивает скрытность измерений, т.е. измеряемые объекты не могут обнаружить, что по ним измеряется дальность, что особенно важно для решения военных задач. Таким образом, в результате анализа двух цифровых фотографий, полученных в результате поворота оптической оси фотоаппарата по горизонтали на угол , удается определить как расстояния, так и высоты нескольких объектов, одновременно попадающих в поле зрения, обеспечивая при этом скрытность измерений. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
Метки: высот, определения, объектов, дальности, способ
Код ссылки
<a href="https://by.patents.su/4-14570-sposob-opredeleniya-dalnosti-do-obektov-i-ih-vysot.html" rel="bookmark" title="База патентов Беларуси">Способ определения дальности до объектов и их высот</a>
Измеритель расстояний
Номер патента: U 6127
Опубликовано: 30.04.2010
Автор: Козлов Владимир Леонидович
МПК: G01C 3/00
Метки: измеритель, расстояний
Текст:
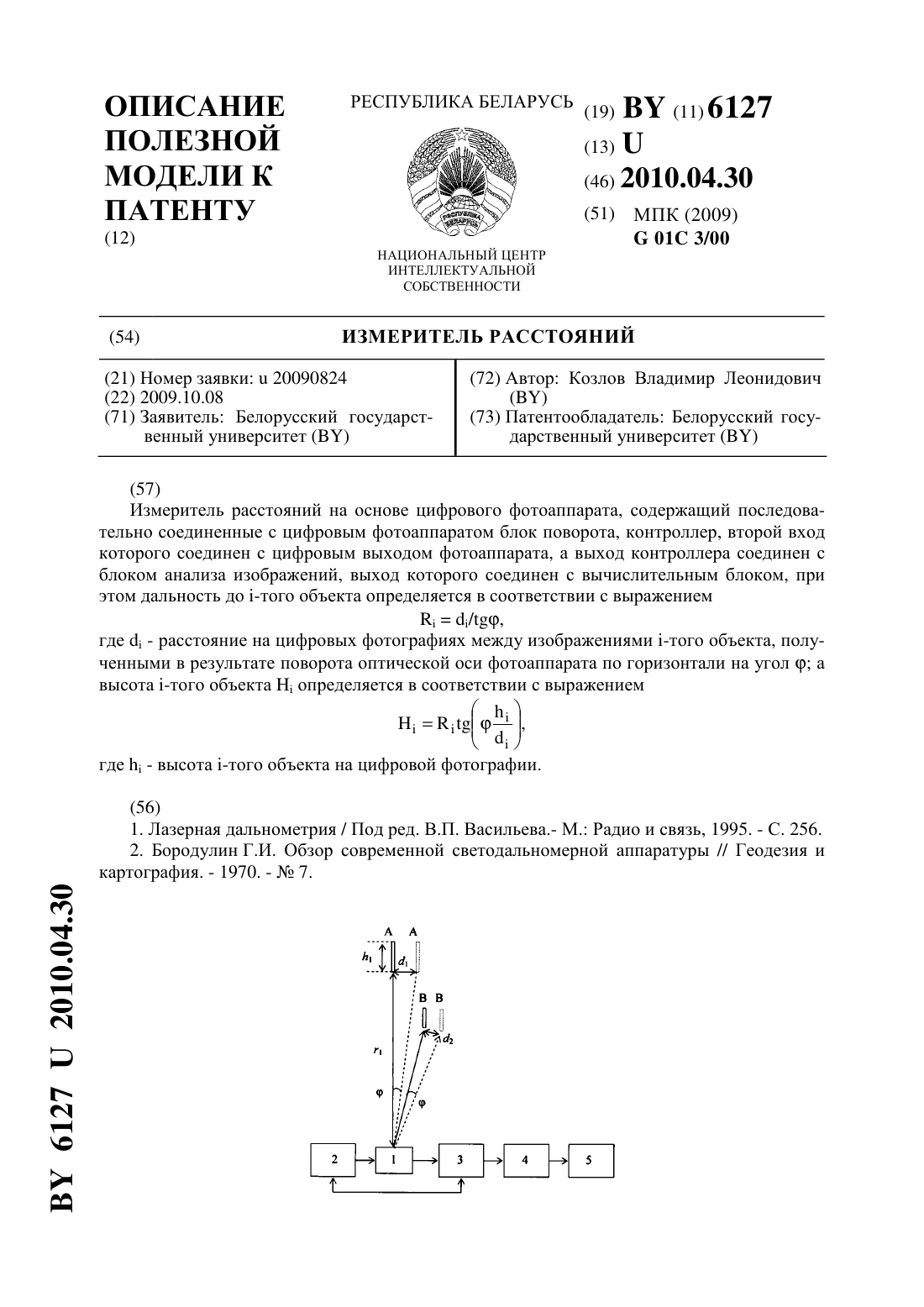
...на цифровых фотографиях между изображениями -того объекта, полученными в результате поворота оптической оси фотоаппарата по горизонтали на угола высота -того объектаопределяется в соответствии с выражением,где- высота -того объекта на цифровой фотографии. Свойства, появляющиеся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное корреляционной обработкой цифровых изображений в блоке анализа изображений...
Способ определения дальности до объекта и его скорости
Номер патента: 13509
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
Метки: объекта, способ, определения, скорости, дальности
Текст:
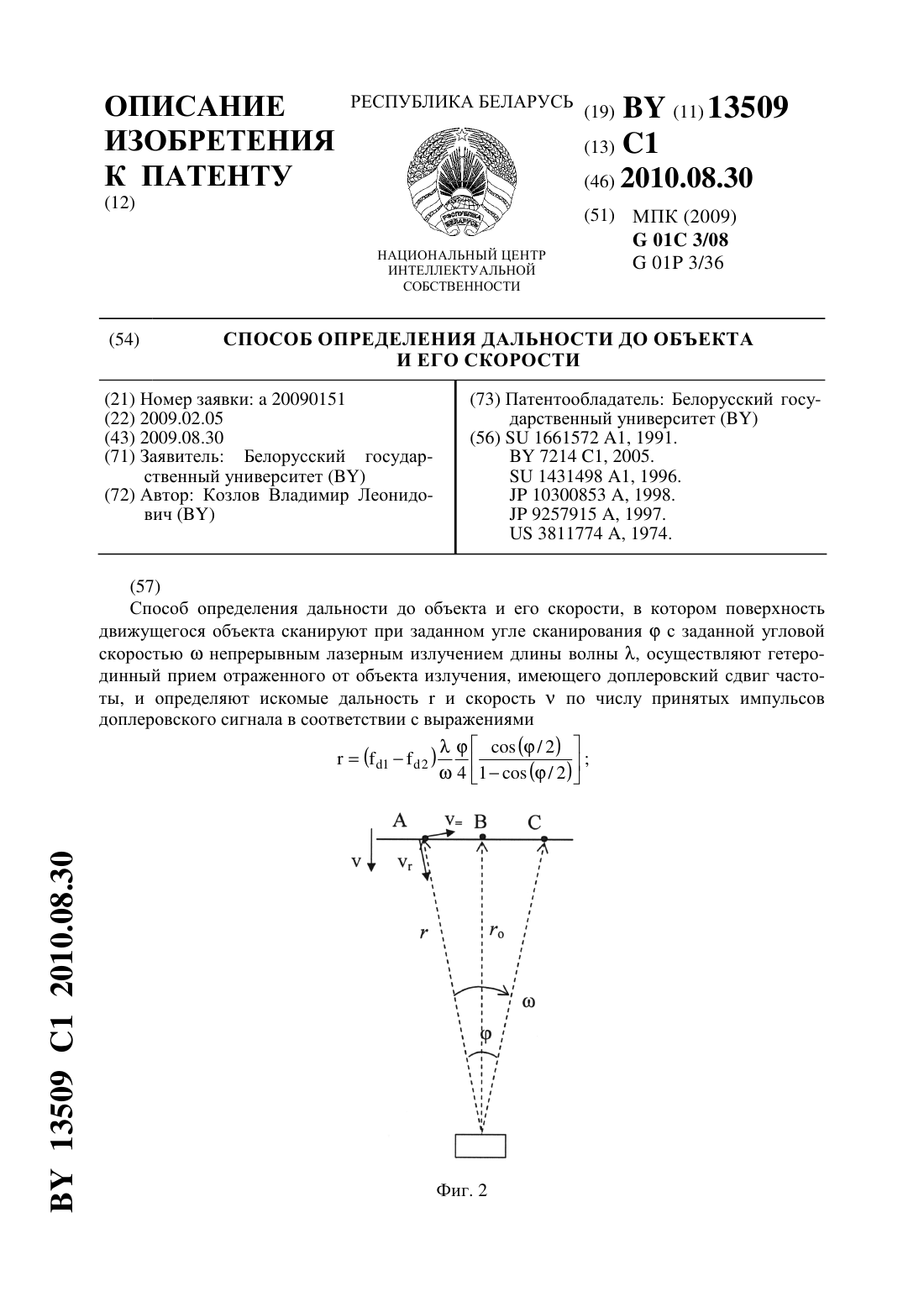
...неподвижна, поэтому отраженное от поверхности оптическое излучение будет сдвигаться по частоте по сравнению с зондирующим сигналом на доплеровскую частоту , обусловленную только сканированием поверхности лазерным лучом, мгновенное значение которой имеет величину где- линейная скорость перемещения лазерного луча вдоль линии сканирования, - расстояние до точки падения лазерного луча,- угловая скорость сканирования,скорость света,- длина волны...
Способ определения дальности до объекта
Номер патента: 13549
Опубликовано: 30.08.2010
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: способ, определения, объекта, дальности
Текст:
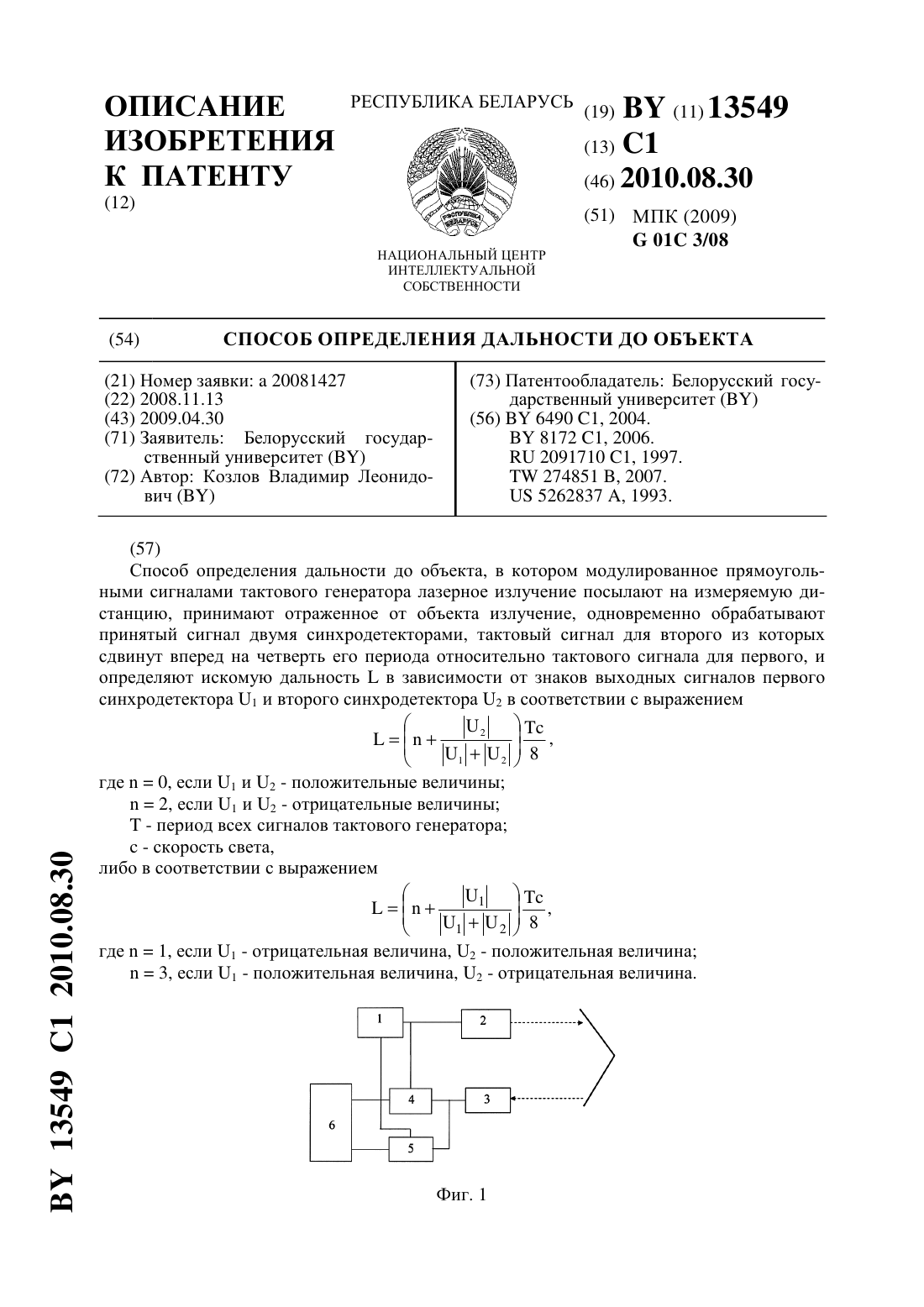
...а на фиг. 2 - графические материалы, поясняющие его работу. Для реализации заявляемого способа используются тактовый генератор 1, лазер 2, фотоприемник 3, первый синхродетектор 4, второй синхродетектор 5, вычислительный блок 6. Принцип измерения основан на фазовом способе измерения дальности, в котором фаза оптического сигнала, прошедшего измеряемое расстояние, сравнивается с фазой сигнала тактового генератора. При этом полагается, что...
Способ определения дальности до объекта и его скорости
Номер патента: 11960
Опубликовано: 30.06.2009
Автор: Козлов Владимир Леонидович
МПК: G01S 17/00, G01P 3/36, G01C 3/08...
Метки: скорости, дальности, объекта, способ, определения
Текст:
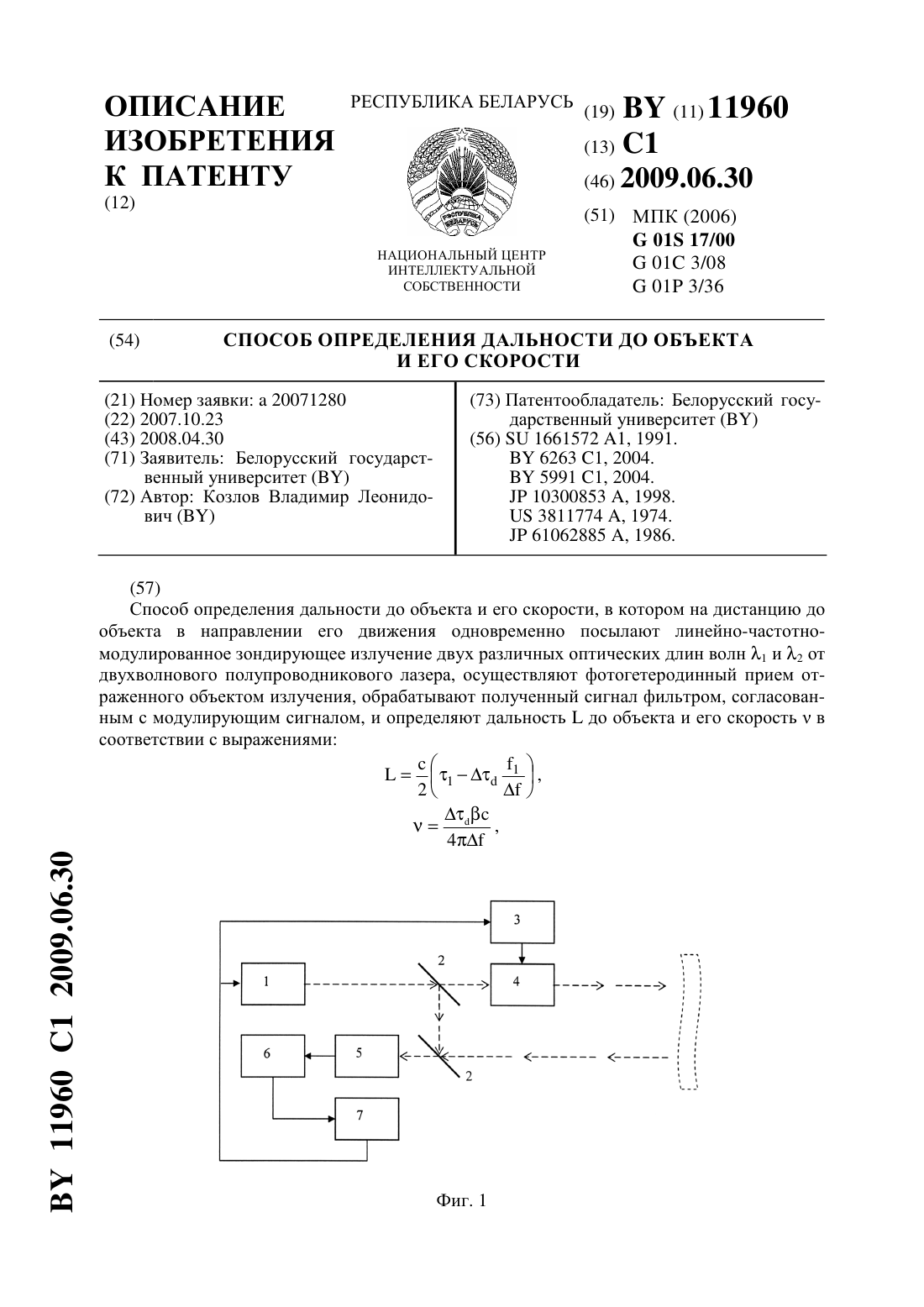
...Для обеспечения возможности одновременного определения за один зондирующий импульс дальности и скорости объекта в качестве источника зондирующего излучения предлагается использовать двухволновой инжекционный полупроводниковый лазер 2,обеспечивающий одновременную генерацию излучения на двух различных оптических длинах волн. Разность длин волн генерации 1 - 2 для асимметричных квантоворазмерных лазерных диодов 3 достигает значений 20-100 нм....
Способ определения коэффициентов излучения и истинной температуры объектов
Номер патента: 6736
Опубликовано: 30.12.2004
Автор: Козлов Владимир Леонидович
МПК: G01J 5/00
Метки: коэффициентов, способ, определения, температуры, истинной, объектов, излучения
Текст:
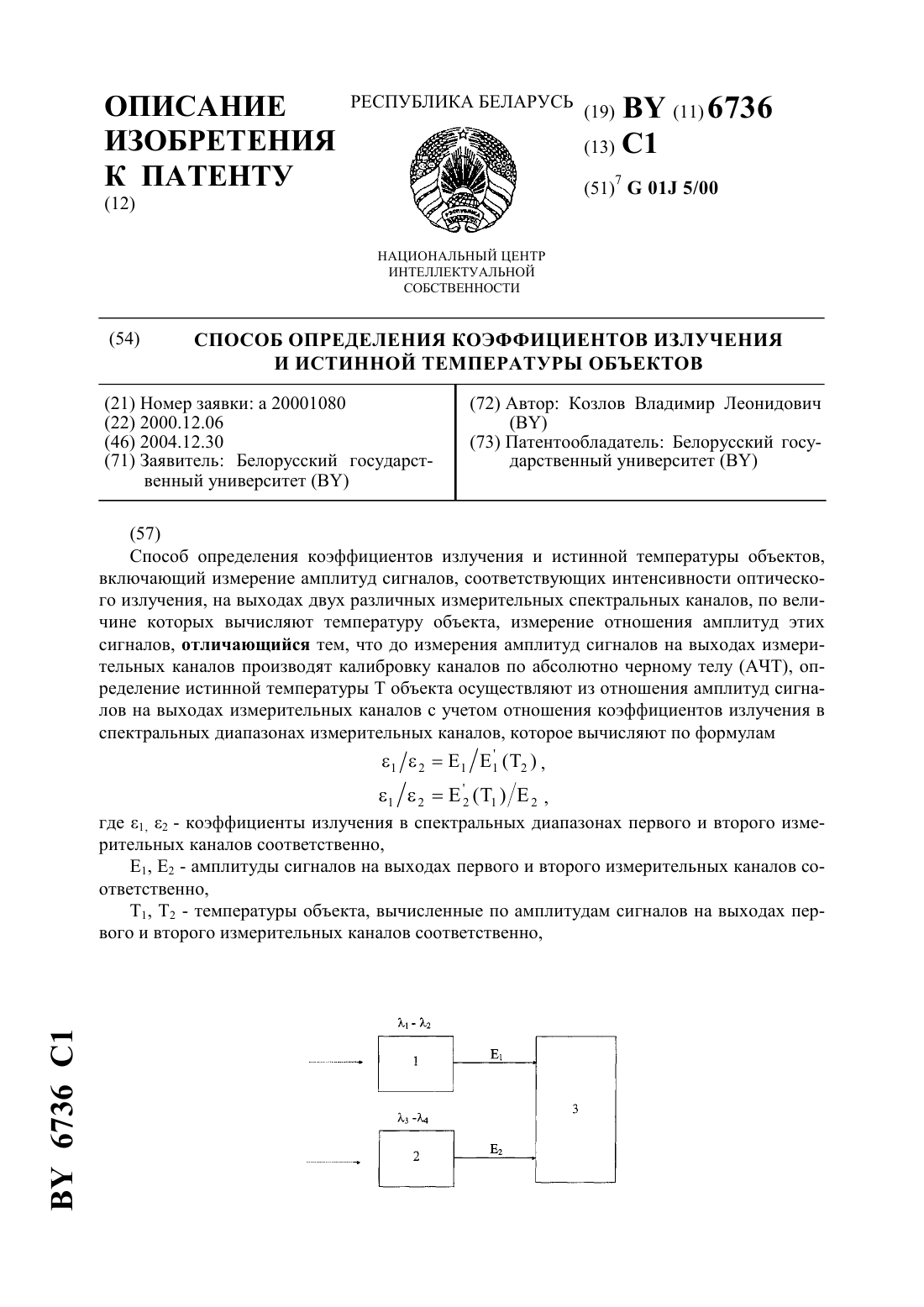
...истинной температуре объекта . Функциональная схема устройства, реализующего предложенный способ, представлена на фигуре. Устройство содержит два измерительных канала 1 и 2 со спектральными диапазонами 1-2 и 3-4, соответственно, электрические сигналы на выходах которых пропорциональны потокам излучения в этих участках спектра, и информационно-измерительный блок 3, выполненный на базе микропроцессора. Система работает следующим образом....
Предыдущий патент: Питательная среда для культивирования кампилобактерий
Следующий патент: Способ получения защитного покрытия на шамотных изделиях
Случайный патент: Устройство для измельчения продуктов