Полуактивная радиолокационная станция
Номер патента: 6635
Опубликовано: 30.12.2004
Авторы: Ежов Сергей Юрьевич, Охрименко Александр Евгеньевич, Шаляпин Сергей Валентинович, Пучило Александр Викентьевич, Романов Алексей Валерьевич, Курлович Виктор Иванович, Папушой Виталий Иванович, Новак Владислав Андреевич, Ватутин Андрей Евгеньевич, Давыденко Игорь Николаевич
Текст
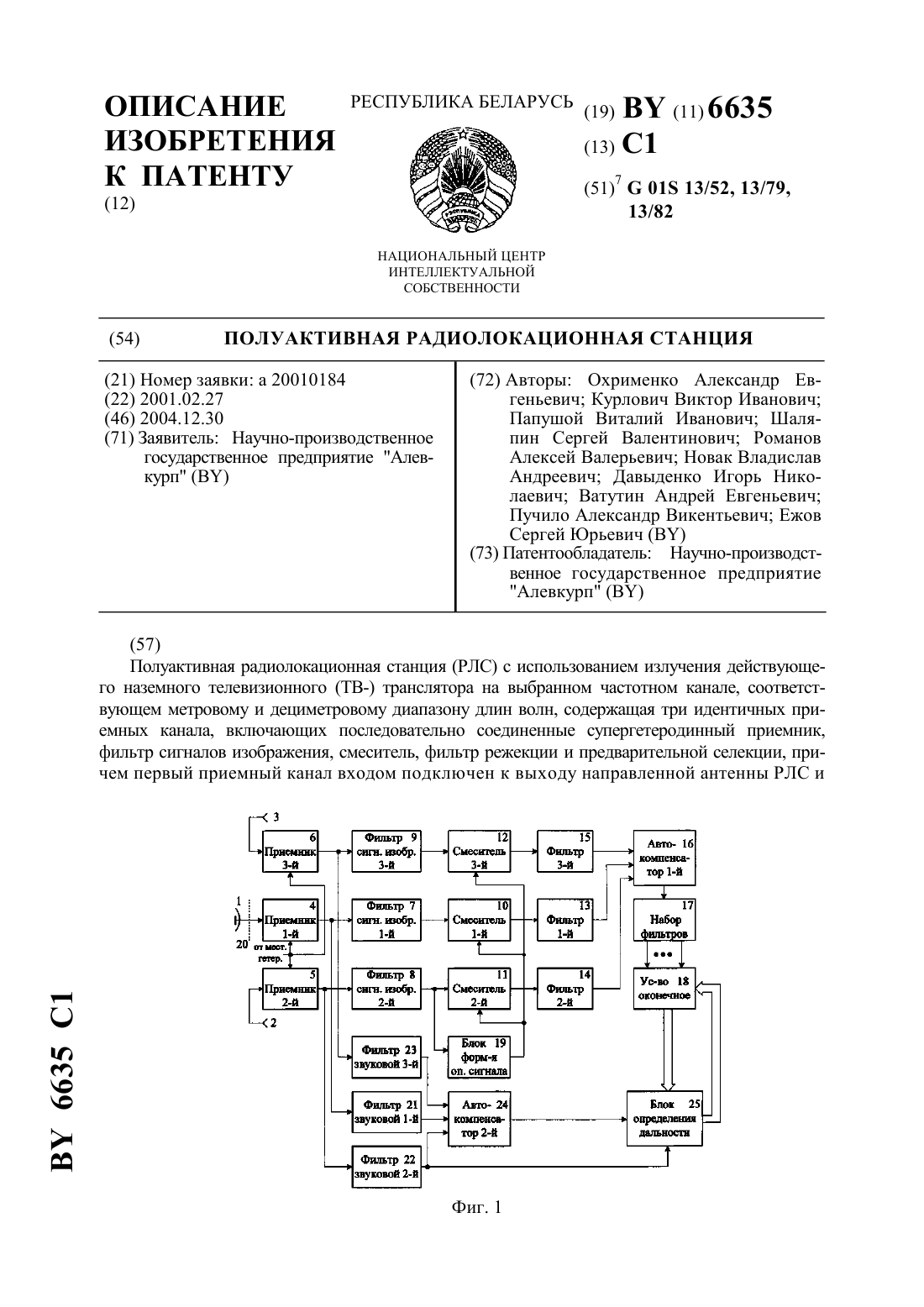
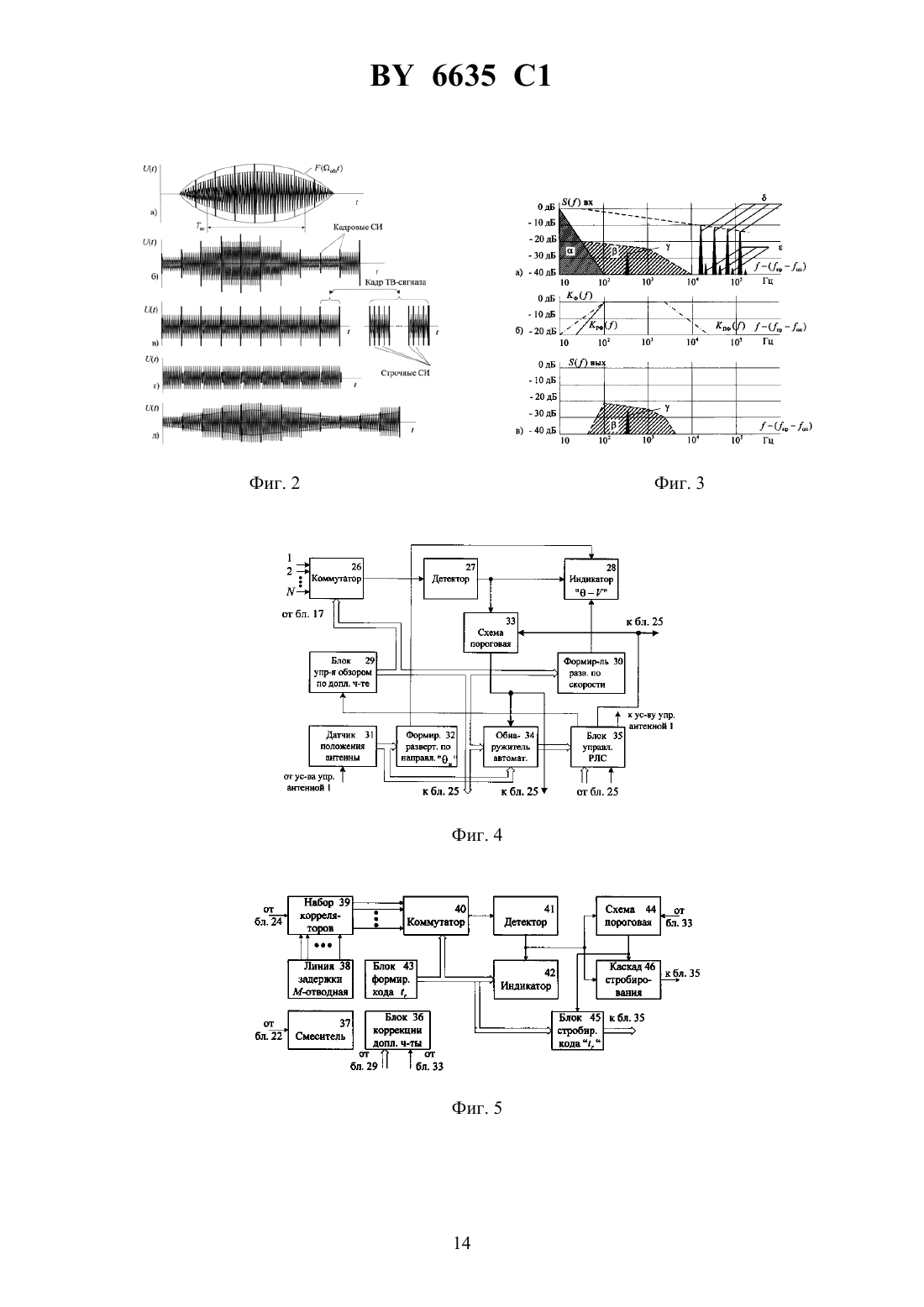
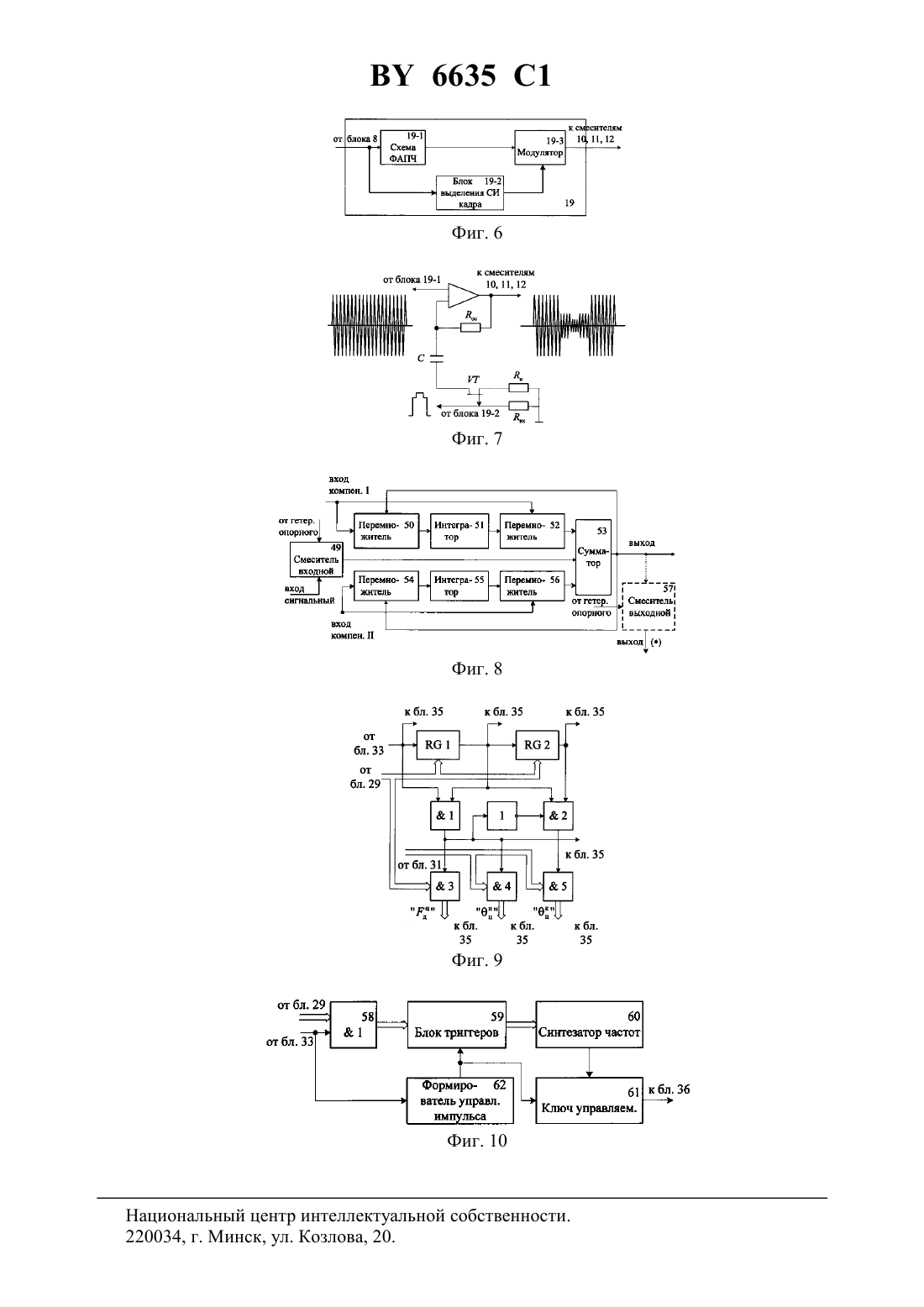
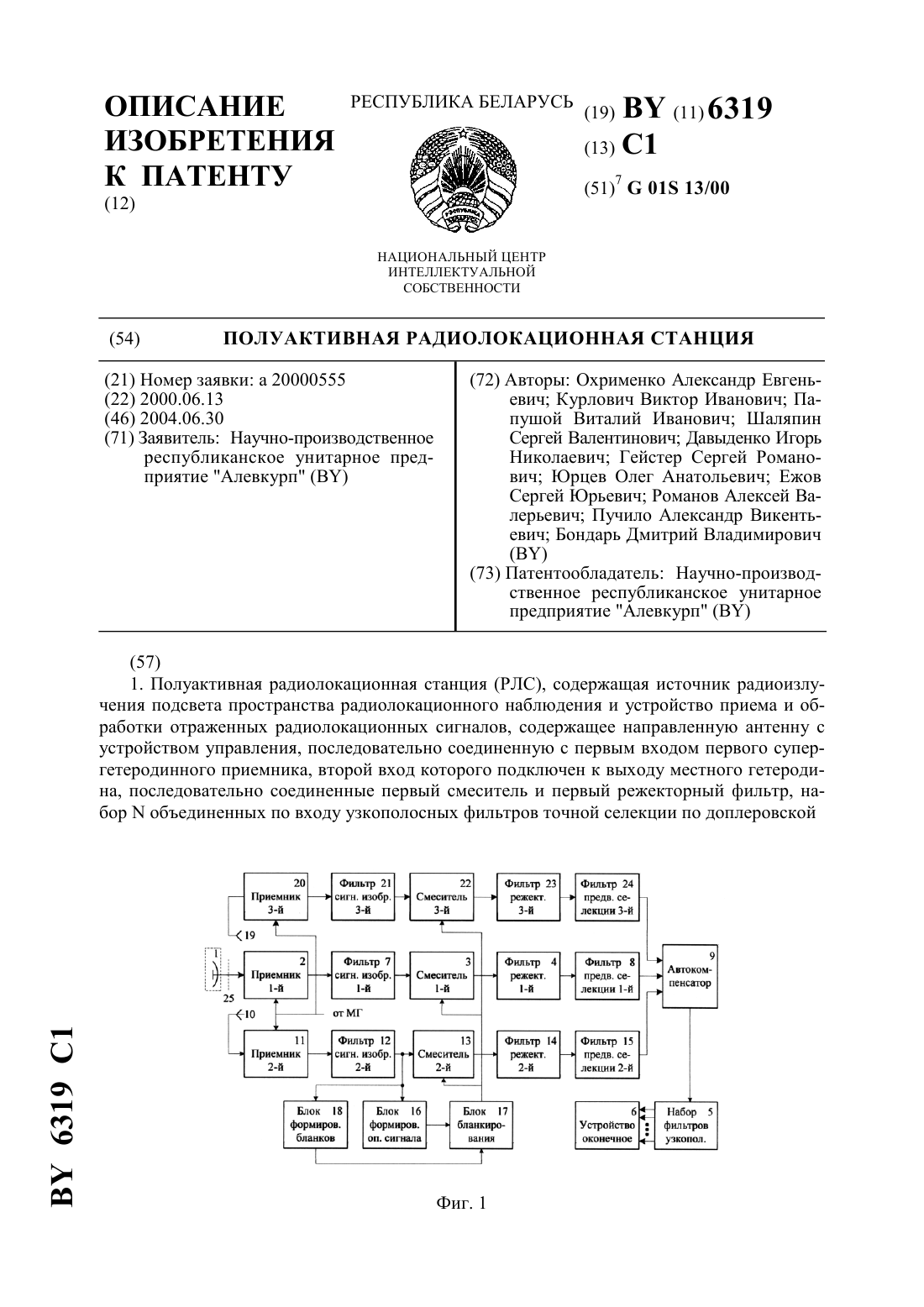
13/82 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(72) Авторы Охрименко Александр Евгеньевич Курлович Виктор Иванович Папушой Виталий Иванович Шаляпин Сергей Валентинович Романов Алексей Валерьевич Новак Владислав Андреевич Давыденко Игорь Николаевич Ватутин Андрей Евгеньевич Пучило Александр Викентьевич Ежов Сергей Юрьевич(57) Полуактивная радиолокационная станция (РЛС) с использованием излучения действующего наземного телевизионного (ТВ-) транслятора на выбранном частотном канале, соответствующем метровому и дециметровому диапазону длин волн, содержащая три идентичных приемных канала, включающих последовательно соединенные супергетеродинный приемник,фильтр сигналов изображения, смеситель, фильтр режекции и предварительной селекции, причем первый приемный канал входом подключен к выходу направленной антенны РЛС и 6635 1 является основным, а его выход соединен с сигнальным входом первого автокомпенсатора,выход которого подключен к наборуобъединенных по входу узкополосных фильтров точной селекции по доплеровской частоте, выходы которых подключены к соответствующимвходам оконечного устройства, второй и третий приемные каналы подключены входами к компенсационным антеннам, направленным на наземный ТВ-транслятор, и являются соответственно первым и вторым компенсационными каналами, а их выходы подключены к соответствующим компенсационным входам первого автокомпенсатора, при этом гетеродинные входы супергетеродинных приемников объединены и подключены к выходу местного гетеродина, а вторые входы смесителей объединены и соединены с выходом блока формирования опорного сигнала, входом подключенного к выходу фильтра сигнала изображения первого компенсационного канала, причем компенсационные антенны направлены на наземный ТВтранслятор и размещены неподвижно и симметрично относительно фазового центра направленной антенны РЛС, между которой и ТВ-транслятором размещен электродинамический экран, а ее поляризация ортагональна рабочей поляризации ТВ-транслятора, а также содержащая первый, второй и третий фильтры сигнала звукового сопровождения, причем вход первого фильтра сигнала звукового сопровождения соединен с выходом супергетеродинного приемника основного канала РЛС, а выход первого фильтра сигнала звукового сопровождения подключен к сигнальному входу второго автокомпенсатора, входы второго и третьего фильтров сигнала звукового сопровождения подключены к выходам соответствующих супергетеродинных приемников компенсационых каналов, а выходы второго и третьего фильтров сигнала звукового сопровождения соединены с соответствующими компенсационными входами второго автокомпенсатора, выход которого подключен к первому входу блока определения дальности, выход которого соединен с 1 входом оконечного устройства РЛС, при этом второй вход блока определения дальности подключен к выходу фильтра сигнала звукового сопровождения первого компенсационного канала, а третий вход блока определения дальности подключен к выходу оконечного устройства РЛС.(56) Основы радиолокации и радиоэлектронная борьба. - Ч. 1. - М. Воениздат, 1983. - С. 251-255.5239310 , 1993.2037842 1, 1995.2040008 1, 1995. Изобретение относится к области радиолокации и предназначено для радиолокационного наблюдения движущихся объектов, в первую очередь - воздушных маловысотных. Известны полуактивные радиолокационные станции (РЛС) с внешним источником радиоизлучения для подсвета области радиолокационного наблюдения 1 и РЛС, осуществляющие когерентную обработку принятого радиолокационного сигнала, например 2, с. 254,т.е. способные определять радиальную скорость цели ц по величине измеряемого доплеровского смещения частоты 2 ц дц/ 2 , где- рабочая длина волны РЛС- бистатический угол источник подсвета - цель - РЛС ц - проекция вектора скорости цели на биссектрису бистатического угла. При этом в известных РЛС используют специальный источник, излучающий радиолокационный зондирующий сигнал, что обусловливает их значительное энергопотребление,повышает общий фон радиоизлучений, ограничивает скрытность работы. 6635 1 Целью изобретения является реализация возможности радиолокационного наблюдения с использованием действующих радиоизлучений нерадиолокационного назначения излучений наземных телевизионных (ТВ-) трансляторов в диапазоне метровых или дециметровых волн на выбранных частотных каналах - как источников подсвета области радиолокационного наблюдения, причем сигнал ТВ-трансляции, отраженный от движущегося объекта - цели, используется как полезный радиолокационный сигнал. При этом решение традиционных для радиолокации задач определение направления на цель, ее дальности, а также скорости на основе известных блок-схем и способов построения устройств обработки радиолокационных сигналов неэффективно, что обусловлено следующими факторами во-первых, комплексный ТВ-сигнал имеет сложный и априорно неизвестный закон модуляции - содержит амплитудно-модулированныекомпоненты - кадровые и строчные синхроимпульсы, яркостный сигнал изображения, частотно-модулированный(ЧМ-) сигнал звукового сопровождения, а также сигналы цветности и цветосинхронизации, причем априорно неизвестные компоненты воздействуют на устройства обработки как помеховые во-вторых, отраженный от цели ТВ-сигнал принимается антенной РЛС совместно с прямым сигналом ТВ-трансляции, проникающим по боковым лепесткам диаграммы направленности антенны (ДНА) РЛС, причем воздействие этого сигнала, превышающего полезный не менее чем на 70-90 дБ и содержащего те же компоненты, является помеховым в-третьих, имеет место проблема реализации когерентной обработки радиолокационного сигнала, которая (при использовании специального радиолокационного сигнала) решается введением дополнительного опорного канала 3, с. 288, 4, с. 620, а некогерентная обработка неэффективна ввиду слабости полезного сигнала в-четвертых, известные решения задачи радиолокационного измерения дальности совместно с измерением доплеровской частоты в реальном масштабе времени с использованием матричного коррелятора(,- число элементов разрешения по времени запаздывания и по доплеровской частоте, соответственно) нецелесообразно из-за больших аппаратурных затрат в-пятых, сигнал изображения, имеющий достаточно широкий спектр для измерения времени запаздывания, имеет межстрочную корреляцию (повторяемость), что обусловливает неоднозначность определения дальности цели с интервалом /2 ст/ст(9,619,2) км в зависимости от положения цели относительно линии базы ТВ-транслятор - РЛС (ст 1/Тстр строчная частота, Тстр 64 мкс). Цель изобретения достигается заявляемой РЛС, блок-схема которой представлена на фиг. 1. РЛС содержит направленную антенну 1 (с устройством управления) и две компенсационных 2 и 3,направленных на ТВ-транслятор три идентичных канала обработки в составе соответственно последовательно соединенных супергетеродинных приемников 4, 5 и 6, фильтров сигнала изображения 7, 8 и 9,смесителей 10, 11 и 12, фильтров режекции и предварительной селекции 13, 14 и 15, причем канал, подключенный входом к антенне РЛС 1, является основным, а каналы, подключенные к компенсационным антеннам 2 и 3, являются компенсационными первый автокомпенсатор 16, выход которого подключен ко входу наборафильтров 17 точной селекции по доплеровской частоте, выходы которых соединены соответственно свходами оконечного устройства РЛС 18, при этом сигнальный вход первого автокомпенсатора подключен к выходу фильтра 13 основного канала, а компенсационные входы соединены с выходами фильтров 14 и 15 компенсационных каналов, гетеродинные входы приемников 4, 5 и 6 объединены и соединены с выходом местного гетеродина, а вторые входы смесителей объединены и подключены к выходу блока 19 формирования опорного 6635 1 сигнала, входом соединенного с выходом фильтра 8 сигнала изображения компенсационного канала электродинамический экран 20, размещенный между направленной антенной 1 РЛС и ТВ-транслятором, размеры и удаление которого обеспечивают экранирование зоны нулевых доплеровских частот идентичные фильтры 21, 22 и 23 сигналов звукового сопровождения, по входу соответственно объединенные с фильтрами сигнала изображения 7, 8 и 9, выходы этих фильтров соответственно соединены с сигнальным и компенсационным входами второго автокомпенсатора 24, выход которого подключен к первому входу блока 25 определения дальности, второй вход которого соединен с выходом фильтра 22 сигнала звукового сопровождения компенсационного канала, а выход - с 1 входом оконечного устройства 18, выход которого соединен с третьим входом блока 25 определения дальности. РЛС работает следующим образом. Радиолокационный отраженный сигнал (фиг. 2 а),принятый в процессе обзора по направлению, выполняемого путем изменения положения в пространстве диаграммы направленности антенны (ДНА) 1 РЛС, представляет собой комплексный сигнал ТВ-трансляции, смещенный относительно излучаемого по времени нац и по частоте на дц . При этомц(тццо ) / с , где тц - расстояние от транслятора до цели, цо - расстояние от цели до РЛС, с - скорость света, а дц 2 ц (/ 2) /, как отмечалось ранее. Этот сигнал промодулирован по амплитуде перемещающейся ДНА 1 по закону(бз), где бз - угловая скорость перемещения ДНА 1,- ДНА РЛС в плоскости обзора, и имеет эффективную длительность ао/обз, где- эффективная ширина ДНА РЛС. Одновременно с этим сигналом по боковым (задним) лепесткам ДНА 1 РЛС принимается прямой сигнал ТВ-трансляции (фиг. 2 б) с запаздыванием относительно излученногоп 0 /, где 0 - расстояние от транслятора до РЛС, не имеющий доплеров ского смещения частоты и превышающий отраженный радиолокационный сигнал по мощности на 70-90 дБ и более. Этот прямой сигнал в процессе обзора модулируется боковыми (задними) лепестками ДНА 1 и является основным помеховым сигналом РЛС. Смесь отраженного и прямого сигналов, принятая антенной 1, действует на выходе приемника 4 на промежуточной частотепр 0 мг , где 0 - рабочая частота ТВтрансляции, мг - рабочая частота местного гетеродина. Одновременно на выходах приемников 5 и 6 действуют принимаемые антеннами 2 и 3 прямые сигналы ТВ-трансляции (фиг. 2 в). Когерентные принятым антенной 1, но постоянные по величине, т.к. компенсационные антенны 2 и 3 неподвижны и направлены на ТВ-транслятор. По временному положению и доплеровской частоте они совпадают с проникающим по боковым лепесткам антенны 1 прямым сигналом (фиг. 2 б). С выходов идентичных приемников 4, 5 и 6 эти сигналы поступают в фильтры сигналов изображения 7, 8 и 9, где из комплексного ТВ-сигнала выделяются кадровые синхроимпульсы (СИ), несущая и яркостный сигнал изображения 5. При этом в блоке 19 из принятого прямого ТВ-сигнала формируется опорное колебание (фиг. 2 г) частотой оп, когерентное колебаниям несущей прямого ТВ-сигнала, причем амплитуда его постоянна, за исключением моментов времени, соответствующих кадровым синхроимпульсам прямого ТВ-сигнала. В эти моменты амплитуда опорного сигнала модулируется обратно пропорционально амплитуде кадровых СИ, за счет чего обеспечивается временное подавление наиболее интенсивных мешающих компонентов - кадровых СИ прямых сигналов в смесителях 11 и 12 и проникающего по боковым лепесткам ДНА 1 прямого ТВ-сигнала в смесителе 10 (фиг. 2 д) совместно с преобразованием частоты принятых сигналов на частоту В результате на выходе смесителя 10 основного приемного канала на несущей частотепр действуют колебания, содержащие 5 следующие спектральные составляющие (фиг. 3) несущая сигнала изображения прямого сигналасоставляющие спектра яркостного сигнала изображения , примыкающие к составляющей , воспринимаемые РЛС как флуктуации несущая сигнала изображения отраженного радиолокационного сигнала , смещен 2/ 2 ная по частоте на величину дц спектральные составляющие строчных синхроимпульсовпроникающего сигнала на частотах 15,635 кГц с примыкающими к ним составляющими яркостного сигнала изображения спектральные составляющиестрочных СИ отраженного радиолокационного сигнала, смещенные на дц относительно составляющих . Следует заметить, что на спектральной диаграмме (фиг. 3 а) не показаны спектральные составляющие кадровых СИ проникающего сигнала ТВ-трансляции на частотах 50 Гц относительно несущей, подавленные в смесителе 10, а также кадровых СИ отраженного радиолокационного сигнала ввиду их малости даже в логарифмическом масштабе. Следует также учесть, что изображенные соотношения по мощности представлены с учетом подавления всех составляющих проникающего ТВ-сигнала за счет электродинамического экрана 20 и поляризационного ослабления за счет ортогональной поляризации антенны 1 на 20-30 дБ. Эти сигналы поступают на вход фильтра 13 режекции и предварительной селекции,образованного последовательно соединенными режекторным фильтром (РФ) (с настройкой на частоту пр - оп) и полосовым фильтром (ПФ) с полосой фильтрации пф, как показано на фиг. 3 б. При таком построении обеспечивается эффективное подавление мешающих составляющих , , .выходе фильтра 13 будут действовать (фиг. 3 в) лишь составляющие, которые соответствуют диапазону доплеровских частот обнаруживаемых целей- несущая сигнала изображения отраженного сигнала на частоте дц относительно пр - оп эффективной шириной 1/Тао и- составляющие спектра яркостного сигнала изображения прямого ТВ-сигнала, проникающего по боковым лепесткам ДНА 1. Одновременно на выходах идентичных фильтров 14 и 15 действуют только сигналы,представленные составляющими , т.к. соответствующие антенны 2 и 3 направлены на ТВ-транслятор и отраженный радиолокационный сигнал не принимают. Следует подчеркнуть, что эти сигналы на выходах фильтров 13, 14 и 15 взаимно коррелированны, т.к. являются результатом одинаковой обработки одного и того же сигнала ТВ-трансляции. Эти сигналы соответственно поступают на сигнальный и два компенсационных входа автокомпенсатора 16, в котором осуществляется подавление мешающей спектральной составляющей(фиг. 3 в), т.е. выделение полезного сигнала- несущей сигнала изображения отраженного радиолокационного сигнала с частотой дц относительно пр - оп. При этом подавление осуществляется путем вычитания выходных сигналов компенсационных каналов (фильтры 14 и 15) из сигнала основного канала (выход фильтра 13) при автоподстройке компенсирующих сигналов по амплитуде и фазе 2, с. 317, причем существенно именно 2-кратное вычитание вследствие специфических корреляционных свойств подавляемых сигналов 6. Выделенный сигнал с выхода автокомпенсатора 16 поступает на вход набора 17 объединенных по входу узкополосных фильтров точной селекции, взаимно расстроенных по частоте в диапазоне доплеровских частот отпропд допропд . 6635 1 Ширина полосы пропускания каждого из этих фильтров ф определяет разрешающую способность РЛС по доплеровской частоте дф и, соответственно, по радиальной скоростиф . При этом фильтры взаимно расстроены по частоте на величину 2 ф, а их количестводд /ф . Если на входе РЛС действует отраженный ра диолокационный сигнал с доплеровской частотой дц , то выделенный сигнал несущей изображения отраженного радиолокационного сигнала будет действовать на выходе соответствующего фильтра из набора 17, настроенного на эту частоту относительно прпроп . Таким образом, номер фильтра из набора 17 соответствует однозначно доплеровской частоте и, следовательно, скорости цели. Выходы фильтров набора 17 подключены к соответствующимвходам оконечного устройства 18, которое обеспечивает обнаружение цели и определение ее координат скорость - направление путем принятия решения о наличии сигнала на выходе какого-либо фильтра из набора 17 и установления номера этого фильтра для каждого углового направления в секторе обзора направленной антенны 1 РЛС запуск блока 25 определения дальности при обнаружении цели и его настройку по скорости (по доплеровской частоте) обнаруженной цели путем, например, выдачи в блок 25 сигнала обнаружения и кодадц- доплеровской частоты цели. С целью определения дальности цели в РЛС также введены фильтры 21, 22 и 23 сигнала звукового сопровождения, подключенные соответственно к выходам супергетеродинных приемников 4, 5 и 6 основного и компенсационных каналов РЛС. Эти фильтры, в зв соответствии с используемым стандартом ТВ-трансляции 5, настроены на частотупр ,отличающуюся от пр на 6,5 МГц, и выделяют принятый ЧМ-радиосигнал звукового сопровождения. При этом, аналогично сигналу изображения во время ао радиолокационного контакта с целью, на выходе фильтра 21 основного канала действует ЧМ-радиосигнал зв звука отраженного радиолокационного сигнала с частотойпрдц совместно с проникающим по боковым лепесткам ДНА 1 прямым ЧМ-радиосигналом звукового сопровождения от ТВ-транслятора, а на выходах фильтров 22 и 23 - только прямой ЧМ-радиосигнал звукового сопровождения от ТВ-транслятора. Эти сигналы соответственно поступают на сигнальный и два компенсационных входа второго автокомпенсатора, в котором осуществляется подавление проникающего по боковым (задним) лепесткам ДНА 1 прямого ЧМсигнала звукового сопровождения соответствующими сигналами компенсационных каналов. В результате на выходе второго автокомпенсатора 24 будет действовать только ЧМрадиосигнал звукового сопровождения отраженного радиолокационного сигнала на часзв тотепрдцо , где- частота опорного гетеродина второго автокомпенсатора 24. Этот ЧМ-радиосигнал с эффективной шириной спектра зв 50100 кГц позволяет обеспечить измерение времени запаздывания отраженного радиолокационного сигнала и,соответственно, дальности с разрешающей способностьюот с/зв до с/2 зв в зависимости от положения цели относительно базы ТВ-транслятор - РЛС, что соответствует 1,55 км. Заметим, что время задержки отраженного радиолокационного сигнала относительно прямого сигнала ТВ-трансляции составляетцс(тццото ) , где ктц - расстоя ние от транслятора до цели, цо - расстояние от цели до РЛС, то - известное расстояние от транслятора до РЛС. Выделенный в автокомпенсаторе 24 ЧМ-радиосигнал звукового сопровождения отраженного радиолокационного сигнала поступает на первый вход блока 25 определения дальности, в котором 6 6635 1 осуществляется измерение времени запаздыванияц отраженного радиолокационного сигнала относительно опорного, принимаемого компенсационным каналом и поступающего на второй вход блока 25, совместно с его выделением на фоне шумов формирование сигналов (кодов) времени запаздывания, амплитуды и др., необходимых для потребителя или вычислительных процедур вторичной обработки, которые через выходную шину блока 25 поступают на 1-й вход оконечного устройства 18. Запуск блока 25 при обнаружении цели и коррекция процедуры выделения сигнала в зависимости от доплеровской частоты дц обнаруженной цели осуществляются по шине данных с выхода оконечного устройства 18 на третий вход блока 25 определения дальности. При этом обнаружение цели и измерение доплеровской частоты дц производится в оконечном устройстве 18 отдельно от измерения времени запаздыванияц в блоке 25, ко торое выполняется вторым этапом после учета (компенсации) доплеровской частоты. Материалы описания поясняются следующими фигурами графических изображений фиг. 1 - блок-схема заявляемой РЛС фиг. 2 - временные диаграммы фиг. 3 - спектральные диаграммы фиг. 4 - блок-схема оконечного устройства фиг. 5 - блок-схема блока определения дальности фиг. 6 - схема блока формирования опорного сигнала фиг. 7 - схема пример выполнения модулятора фиг. 8 - блок-схема автокомпенсатора фиг. 9 - блок-схема автоматического обнаружителя 4 фиг. 10 - схема блока коррекции доплеровской частоты. Осуществимость заявляемой РЛС подтверждается возможностью ее реализации с использованием известных узлов и блоков или известных вычислительных процедур. Оконечное устройство 18 РЛС включает (фиг. 4) последовательно соединенные коммутатор 26 навходов, детектор 27 и индикатор 28, причем входы коммутатора 26 подключены к выходам соответствующих фильтров точной селекции из набора 17, а указанный вход индикатора является сигнальным последовательно соединенные блок 29 управления обзором по доплеровской частоте,формирователь 30 развертки по радиальной скорости, выходом соединенный со вторым входом (развертка по скорости) индикатора 28, а управляющий вход коммутатора 26 подключен к выходу блока 29 управления обзором по доплеровской частоте. При этом в блоке 29 управления обзором по доплеровской частоте формируется параллельный цифровой код, значение которого соответствует номеру фильтра точной селекции из набора 17, подключаемого коммутатором 26 ко входу детектора 27 в данный момент. Таким образом, при смене значения кодов от 1 до , осуществляется последовательное подключение всехфильтров к сигнальному входу индикатора 28 через детектор 26. Синхронно с подключением фильтров, соответствующих различным доплеровским частотам,осуществляется формирование развертки индикатора 28 по скорости формирователем 30, который преобразует в напряжение (ток) развертки текущее значение кода обзора с выхода блока 29. Вследствие этого положение сигнальной отметки (амплитудной или яркостной), которая обусловлена сигналом с выхода детектора 27 на этой развертке, будет соответствовать доплеровской частоте цели дц и, соответственно, ее радиальной скорости. Для отображения координат цели в системе направление - скорость введены последовательно соединенные датчик 31 положения антенны, формирователь 32 развертки по направлению, выход которого подключен к третьему входу индикатора развертка по направлению. При этом вход датчика 31 соединен с устройством управления антенной(спецвычислителем при использовании ФАР, электромеханическим сканером или сило 7 6635 1 вым приводом). Таким образом, на выходе датчика 31 действует цифровой код, соответствующий направлению ДНА 1 в текущий момент времени, который преобразуется формирователем 31 в напряжение (ток) развертки по направлению, что и поступает на соответствующий вход индикатора 27. Вследствие синхронности развертки положению антенны положение на экране индикатора 28 отметки, обусловленной сигналом с детектора 27, будет соответствовать угловому положению ДНА 1 и, соответственно, направлению на цель(азимуту или углу места). Заметим, что так как обзор по доплеровской частоте осуществляется быстрее, чем по направлению, то при растровом варианте развертки индикатора 28 развертка по скорости осуществляется строчная, а по направлению - кадровая при радиально-круговом варианте развертка по скорости осуществляется радиальная, по направлению - круговая. Для автоматизации принятия решения и определения координат целей в оконечное устройство также введены последовательно соединенные схема 33 пороговая, автоматический обнаружитель 34 и блок управления РЛС 35, причем сигнальный вход схемы 33 пороговой подключен к выходу детектора 27, а пороговый вход - к первому выходу блока 35 управления РЛС, при этом второй и третий входы обнаружителя 34 соединены соответственно с выходами блока 29 управления обзором по доплеровской частоте и датчика 31 положения антенны. Если величина сигнала с выхода фильтра из набора 17, подключенного в ходе обзора через коммутатор 26 и детектор 27 к пороговой схеме 33, превышает пороговый уровень,то на выходе схемы 33 формируется сигнал превышения порога, поступающий на вход обнаружителя 34, в котором выделяются действующие в этот момент времени значения кодов доплеровской частотыдци направления ц. Так как за время пространственного контакта с целью ао может иметь местообзоров по скорости и соответственно может формироватьсясигналов превышения порога, то итоговое решение о наличии цели с доплеровской частотой, соответствующей -му фильтру в обнаружителе, принимается по критериюиз , а также выделяются значения кода направлениян ,к , при коц ц торых начинается и завершается радиолокационный контакт с целью (в первый и в последний раз наблюдается сигнал превышения порога на -й доплеровской частоте дц ). Для согласования по времени обзоров по направлению и по доплеровской частоте второй и третий выходы блока 35 могут быть подключены к синхронизирующим входам блока 29 и устройства управления. Таким образом, реализуются все функции оконечного устройства. Блок 25 определения дальности может быть реализован с использованием методов фильтровой обработки и корреляционной обработки. Реализация фильтровым способом осуществляется на основе фильтра 7, импульсная характеристика которого задается прямым сигналом ТВ-трансляции, принимаемым компенсационным каналом РЛС. При реализации корреляционным способом блок 25 содержит (фиг. 5) последовательно соединенные блок 36 коррекции доплеровской частоты, смеситель 37, М-отводную линию 38 задержки, набор 39 из М корреляторов, коммутатор 40, детектор 41, индикатор 42,причем первый и второй входы блока 36 коррекции подключены к выходам блоков 29 и 33 оконечного устройства 18 соответственно, второй вход смесителя 37 подключен к выходу блока 22 и является вторым входом блока 25, а второй вход набора 39 из М корреляторов соединен с выходом блока 24 и является объединенным сигнальным входом корреляторов из набора 39, выходы которых подключены к соответствующим М входам коммутатора 40, управляющий вход которого соединен с выходом блока 43 формирования кодавремени запаздывания, при этом М отводов линии 38 задержки соединены с соответствующими входами по опорному сигналу корреляторов набора 39. 8 6635 1 Блок 36 коррекции доплеровской частоты работает следующим образом сигналом превышения порога от блока 33 осуществляется стробирование значения кода доплеров ской частотыдци его запоминание на период обз обзора по доплеровской частоте и на это время формируется сигнал коррекции доплеровской частотыдц в соответствии с отстробированным значением кодадц . Этот сигнал поступает на вход смесителя 37,на второй вход которого от блока 22 поступает принятый ЧМ-радиосигнал звукового созв провождения ТВ-транслятора от блока 24 частотойпр . Тогда опорный сигнал звукового зв сопровождения на выходе смесителя будет иметь частотупрдц . Этот сигнал поступает на М-отводную линию 38 задержки, причем М - число отводов - соответствует количеству потенциально достижимых элементов разрешения по времени запаздывания впределах дальности обнаружения РЛС, а временной интервал между отво дами обеспечивают равным. Таким образом, обеспечивается формирование набора опорных сигналов для корреляторов набора 39, рассовмещенных по временному положению наи перекрывающих весь диапазон дальности, причем временная структура каждого опорного сигнала соответствует временной структуре действующего ЧМ-сигнала зв звукового сопровождения, а частотапрдц обеспечивает компенсацию доплеровского смещения частоты отраженного от цели ЧМ-сигнала звукового сопровождения. На объединенный сигнальный вход корреляторов с выхода автокомпенсатора 24 поступает зв отраженный от цели ЧМ-радиосигнал звукового сопровождения частотойпрдц и, в результате перемножения в соответствующем корреляторе с тем из опорных, который совпадает по времени задержки, во-первых, преобразуется по частоте на зв звпрдц( прдц), во-вторых, демодулируется, т.е. сжимается по спектру, а затем накапливается в узкополосном фильтре коррелятора, настроенном на частоту. При этом полоса пропускания узкополосного фильтра коррелятора выбирается равной полосе пропускания фильтра из набора 17 и равной разрешающей способности доплеровской частоте фд. При этом номер коррелятора, на выходе которого формируется наибольший отклик,отождествляется с номером элемента разрешения по времени запаздывания, в котором находится цель. Естественно, что задержка по времени опорного сигнала этого коррелятора в линии 38 будет равна времени запаздывания отраженного радиолокационного сигналац . Для установления этого соответствия осуществляется последовательное подключение выходов корреляторов набора 39 к детектору через коммутатор 40, на управляющий вход которого поступает изменяющееся значение кода времени запаздывания. В соответствии со значением этого кода корреляторы поочередно подключаются ко входу детектора 41. Продетектированные выходные сигналы корреляторов поступают на сигнальный вход индикатора 42, вход развертки которого подключен к выходу блока 43 формирования кодавремени запаздывания. При этом в индикаторе значение действующего кода преобразуется в напряжение (ток) развертки, синхронной опросу корреляторов, и обеспечивается соответствие положения сигнальной отметки на развертке индикатора 42 времени запаздывания и, соответственно, относительной дальности цели. Для автоматизации измерения времени запаздыванияц отраженного сигнала и, соот ветственно, дальности цели, а также обеспечения необходимых вычислительных процедур в блок 25 также включается схема 44 пороговая, выход которой подключен к объединенным по входам стробирования блоку 45 стробирования кодавремени запаздывания и каскаду 46 стробирования. При этом сигнальный вход каскада 46 стробирования подклю 9 6635 1 чен к выходу детектора 41, а вход блока 45 подключен к выходу блока 43 формирования кодавремени запаздывания. Соответственно, выходы блоков 45 и 46 подключены к соответствующим входам блока 35 управления РЛС, а пороговый вход схемы пороговой 44 объединен со входом схемы 33 пороговой оконечного устройства РЛС. При этом во время действия выходного сигнала детектора 41, превышающего порог схемы 44, формируется сигнал превышения порога в виде логической 1, который осуществляет указанное стробирование действующего в этот момент значения кода времени запаздыванияцв блоке 45 стробирования и соответствующего значения продетектиро ванного сигналас выхода коррелятора в блоке 46, которые поступают в блок 35 управления РЛС, в т.ч. для обеспечения формирования взвешенной оценки времени запаздывания отраженного радиолокационного сигналацц /,12. Эта процедура существенна с учетом того, что действующая ширина спектра ЧМзв сигнала звукового сопровождения может быть меньше максимальной 150 кГц и превышение порога может состояться в нескольких соседних элементах разрешения по времени запаздывания, т.е. выходными сигналами нескольких соседних корреляторов. Таким образом, осуществляется построение и работа блока 25 определения дальности при корреляционном способе реализации, который представляется предпочтительным. Антенны 1, 2, 3, приемники 4, 5, 6 (содержащие усилитель высокой частоты, смеситель - преобразователь частоты напрмг и предварительный усилитель высокой частоты), а также смесители 10, 11, 12, фильтры 7, 8, 9 достаточно известны, вполне описаны в научно-технической литературе и широко используются в телевизионной и радиолокационной технике. Блок 19 формирования опорного сигнала (фиг. 6) содержит схему 19-1 фазовой автоподстройки частоты (ФАПЧ), формирующую опорный сигнал смесителей 10, 11, 12, совпадающий с несущей прямого сигнала ТВ-трансляции с точностью до фазы блок 19-2 выделения кадровых синхроимпульсов модулятор 19-3. Схема 19-1 ФАПЧ может быть выполнена на базе устройства ФАПЧ в интегральном исполнении 564 ГГ 1 8, формирующей опорное колебание для смесителей 10, 11, 12. Блок 19-2 выделения кадровых синхроимпульсов (СИ) из комплексного ТВ-сигнала строится, как и известные узлы ТВ-приемников 5 аналогичного назначения. Модулятор 19-3 обеспечивает модуляцию опорного сигнала с выхода схемы ФАПЧ по амплитуде обратно пропорционально выходным сигналам блока 19-2. Эта операция может быть реализована, например, при использовании схемы фиг. 7. Здесь схема построена на базе операционного усилителя в интегральном исполнении 9.ос Коэффициент усиления Км модулятора определяется соотношениемм,если реактивным сопротивлением конденсатора хс можно пренебречь. Напряжение огибающей кадрового синхроимпульса, воздействуя на затвор полевого транзистора ,управляет его сопротивлениеми, соответственно, коэффициентом усиления модулятора м, при запирании транзисторауменьшается Км и обеспечивается необходимая модуляция. Фильтры 13, 14, 15 образуются последовательным соединением режекторного и полосового фильтров, которые достаточно полно описаны в технической литературе 10, 12. Фильтры 21, 22, 23 также известны и используются в ТВ-технике 5. Автокомпенсаторы 16 и 24 (фиг. 8) выполняются на основе известной схемы 2,рис. 15.12, причем компенсационные входы автокомпенсаторов 16 и 24 подключаются к выходам фильтров компенсационных приемных каналов, подключенных к идентичным и 10 6635 1 одинаково направленным антеннам, при этом автокомпенсатор обеспечивает не компенсацию радиопомех от 2-х источников помехового излучения, а 2-кратную компенсацию прямого ТВ-сигнала, т.е. имеет место режимное отличие. При этом сигнальный вход автокомпенсатора 16 подключается к блоку 13, а сигнальный вход автокомпенсатора 24 - к блоку 21, компенсационные же входы - к блокам 14, 15 и 22, 23 соответственно. Следует заметить, что входной смеситель 49, сигнальный вход которого является сигнальным входам автокомпенсатора, осуществляет преобразование входного сигнала по частоте напропопро для автокомпенсатора 16 первого и зв на частотупрдля автокомпенсатора 24 второго, где о и- частоты колебаний опорных гетеродинов автокомпенсаторов 16 и 24 соответственно. Для того, чтобы обеспечить равенство частоты сигнала на выходе автокомпенсатора частоте входного сигнала,может использоваться обратное преобразование в выходном смесителе 57 автокомпенсатора (фиг. 8). Перемножители 50, 52, 54, 56, смесители 49, 57 могут быть выполнены на базе аналогового перемножителя 174 ПС 1 в интегральном исполнении 9, с. 139. Интеграторы 51 и 55 представляют собой узкополосные фильтры, настроенные на частоту опорного генератора о или 10, с. 90-91, или же реализуются в цифровом виде 11. Объединенные по входу узкополосные фильтры точной селекции набора 17 также реализуются известными и описанными в литературе способами как в аналоговом, так и в цифровом 11 виде. Элементы оконечного устройства 18 РЛС (Фиг. 4) также могут быть реализованы известными средствами и способами коммутатор 26, управляемый цифровым кодом, может быть выполнен с использованием набора ключей 561 КТЗ 8, управляющие входы которых подключаются к соответствующим выходам дешифратора, преобразующего параллельный цифровой код в позиционный (например 561 ИД 1) детектор 27 - известный амплитудный детектор 10, с. 96 индикатор 28 - известный двумерный индикатор с растровой или радиально-круговой разверткой и яркостной индикацией по сигнальному входу блок 29 управления обзором обеспечивает формирование циклически изменяющегося цифрового параллельного -разрядного кода, значение которого в данный момент времени соответствует номеру фильтра, подключаемого на выход коммутатора 26, и соответствующей величине доплеровской частоты отраженного от цели сигнала, причем 2 формирователи 30 и 32 развертки индикатора по скорости и направлению представляют собой преобразователи цифрового параллельного кода в напряжение или ток и содержат последовательно соединенные цифроаналоговый преобразователь 10, с. 170 и преобразователь напряжение - ток 12 датчик 31 положения антенны - известный преобразователь угол поворота - код,подключенный к антенному приводу или сканеру, также может быть использован выходной код спецвычислителя при использовании ФАР схема 33 пороговая может быть построена на основе соответствующей схемы в интегральном исполнении (например 597 СА 2, 9) с фиксированным или адаптивно-формируемым в блоке 35 порогом. Автоматический обнаружитель 34, как следует из Описания, должен выполнять следующие функции выделение (стробирование) значений кодов доплеровской частотыдци направле ния на цельник , соответствующих доплеровской частоте обнаруженной цели и ц ц угловым положениям антенны в начале и конце радиолокационного контакта принятие решения о наличии цели за время радиолокационного контакта по критериюиз . 11 6635 1 Пример выполнения такого блока для 3 показан на фиг. 9, где сигнал превышения порога от схемы 33 пороговой поступает на последовательно соединенные сдвиговые регистры 1 и 2, управляемые кодом обзора по доплеровской частоте от блока 29, причем каждая процедура сдвига соответствует изменению значения кода д, а количество позиций сдвига в каждом регистре равно количеству элементов разрешения по доплеровской частоте, эти сигналы, совпадая в схеме И (1), обеспечивают стробирование соответствующего значения кода д в блоке схем И (3), а также стробирование в блоке схем И (4) значения кода направлениян , соответствующее началу радиоц локационного контакта при обзоре по направлению. Соответственно, сигнал обнаружения, соответствующий окончанию радиолокационного контакта, формируется в схеме И(2), а стробирование значения кода направлениякконца радиолокационного конц такта осуществляется в блоке схем И (5). Таким образом, реализуется критерий принятия решения 2 из 3. Аналогично могут быть реализованы другие критерии принятия решения о наличиицели с -й радиальной скоростью. При корреляционном способе реализации блока 25 его узлы могут быть выполнены на основе известных технических решений. Пример выполнения блока 36 коррекции доплеровской частоты представлен на фиг. 10 последовательно соединенные блок 58 схем И (1), блок 59 триггеров, синтезатор 60 частот, управляемый ключ 61, причем первый вход блока 58 является сигнальным и соединен с выходом блока 29, а второй вход - управляющий - подключен к выходу блока 33 или же к выходу схемы И (1) блока 34, а также формирователь 62 управляющего импульса, вход которого объединен с управляющим входом блока 58, а выход подключен к- входублока 59 триггеров. В случае формирования сигнала превышения порога на выходе блока 33 он, поступая на вход блока 36, запускает формирователь 62 управляющего импульса и обеспечивает стробирование действующего в этот момент кода доплеровской частотыдцв блоке 58. Это значение кода запоминается блоком триггеров на время длительности управляющего импульса, примерно равное периоду обзора по доплеровской частоте обз , т.к. триггеры обнуляются спадом управляющего импульса соответствующей длительности. Цифровой коддцс выхода блока 59 поступает на синтезатор 60 частот, где формируется колебание, частота которогодцопределяется действующим на входе блока 60 значением кода. Это колебание через ключ 61, открываемый импульсом с формирователя 62, поступает на смеситель 37, где, смешиваясь с сигналом от блока 22, формирует опорное колезв бание частотойпрдц , соответствующее нулевой дальности. Все упомянутые блоки известны и широко описаны в технической литературе, причем синтезаторы частот известны и строятся по известным правилам 13. Остальные каскады,входящие в блок 25, также известны или строятся по известным способам линия 38 задержки М-отводная выполняется из М-1 секций, образуемых последовательным соединением известных линий задержки 14 набор 39 корреляторов состоит из объединенных по сигнальному входу перемножителей 9, соединенных с узкополосным фильтром 10, причем вторые входы перемножителей соединены с соответствующими отводами линии 38, а выходы фильтров подключены ко входам коммутатора, который строится аналогично коммутатору 26 детектор 41, схема 44 пороговая, индикатор 42, блок стробирования 45, блок 43 формирования циклического кодааналогичны описанным ранее узлам оконечного устройства 18 с учетом того, что период обзора обз по времени запаздывания значительно обз меньше периода обзора по доплеровской частоте 12 6635 1 каскад 46 стробирования - аналоговый ключ, например 561 КТЗ, блок 45 стробирования, выполняется на схемах И аналогично блокам 3, 4, 5. Блок 35 управления РЛС производит документирование результатов радиолокационного наблюдения, их хранение и передачу на пункт сбора радиолокационной информации выполняет расчеты по уточнению координат обнаруженной цели по направлениюц( нк ) / 2 и по дальностицц / выполняет вычисления по пересчету измеренных координат дц ,ц в скорость и даль ность цели относительно РЛС с учетом ее угловых координатцпри необходимости обеспечивает переход из режима обзора в режим слежения за целью и управление РЛС в этом режиме формирование адаптивного порога обнаружения. Все указанные функции реализуются программным методом с использованием универсальной ЭВМ или аппаратным методом при использовании спецвычислителя. В любом случае, это известные вычислительные операции, не требующие специального программного обеспечения, например пересчет времени запаздыванияц в дальность РЛС - цель, где- база - расстояц при круговом обзоре по азимуту цц 2(1( ц 0 ние от ТВ-транслятора до РЛС, ц - азимут цели, 0 - азимут ТВ-транслятора. Таким образом, заявляемая РЛС может быть реализована с использованием известных узлов, схем и вычислительных процедур. Источники информации 1. Черняк , Заславский Л.П. , Осипов Л.В. Многопозиционные радиолокационные станции и системы Сб. Зарубежная радиоэлектроника. -1. - 1987. 2. Основы радиолокации и радиоэлектронная борьба. Ч. 1 / Под ред. А.Е. Охрименко. М. Воениздат, 1983. 3.. . - , , 1980. 4. .,. - , , 1979. 5. Кирилло Л.Р, Бродский И.А. Телевидение. - Мн. Выш. школа, 1983. 6. Охрименко А.Е. и др. Автокомпенсация прямого сигнала в активной бистатической РЛС Сб. Радиотехника и электроника. Вып. 23. - Мн. БГУИР. - С. 21-30. 7. А.с. СССР 1157590, 1985, а.с. СССР 1264715, 1986. 8. Шило В.Л. Популярные цифровые микросхемы. Справочник. - Челябинск Металлургия, 1988. 9. Булычев А.П. , Галкин В.И., Прохоренко В.А. Аналоговые интегральные микросхемы. Справочник. - Мн. Беларусь, 1983. 10. Горошков Б.И. Элементы радиоэлектронных устройств Справочник. - М. Радио и связь, 1988. 11. Цифровые фильтры и устройства обработки сигналов на интегральных микросхемах. Справочное пособие / Под ред. Б.Ф. Высоцкого. - М. Радио и связь, 1984. 12. П. Хоровиц, У. Хилл. Искусство схемотехники. Т. 1 / Пер. с англ. Под ред. М.В. Гальперина. - М. Мир, 1983. 13. Никольский И.Н. Устройства формирования сигналов и синтезаторы частот систем радиосвязи. - Л. ВКАС им С.М. Буденного, 1981. 14. Линии задержки и дроссели высокочастотные Справочник. - М. НИИ МЭП СССР,1969. 13 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 15
МПК / Метки
МПК: G01S 13/79, G01S 13/82, G01S 13/52
Метки: полуактивная, станция, радиолокационная
Код ссылки
<a href="https://by.patents.su/15-6635-poluaktivnaya-radiolokacionnaya-stanciya.html" rel="bookmark" title="База патентов Беларуси">Полуактивная радиолокационная станция</a>
Полуактивная радиолокационная станция
Номер патента: 6319
Опубликовано: 30.06.2004
Авторы: Юрцев Олег Анатольевич, Пучило Александр Викентьевич, Романов Алексей Валерьевич, Папушой Виталий Иванович, Ежов Сергей Юрьевич, Шаляпин Сергей Валентинович, Давыденко Игорь Николаевич, Гейстер Сергей Романович, Охрименко Александр Евгеньевич, Бондарь Дмитрий Владимирович, Курлович Виктор Иванович
МПК: G01S 13/00
Метки: полуактивная, радиолокационная, станция
Текст:
...составляющимимежстрочных и межкадровых флуктуации сигнала изображения прямого ТВ-сигнала. Следует подчеркнуть, что сигналы, соответствующие составляющимна выходах фильтров 8, 15, 24 взаимно коррелированы, т.к. порождаются одним и тем же прямым сигналом ТВ-трансляции, а соответствующие приемные каналы взаимно когерентны, благодаря использованию одних и тех же опорных колебаний, и идентичны. Вместе с тем,амплитуда и фаза проникающего сигнала...
Автоматическая автозаправочная станция
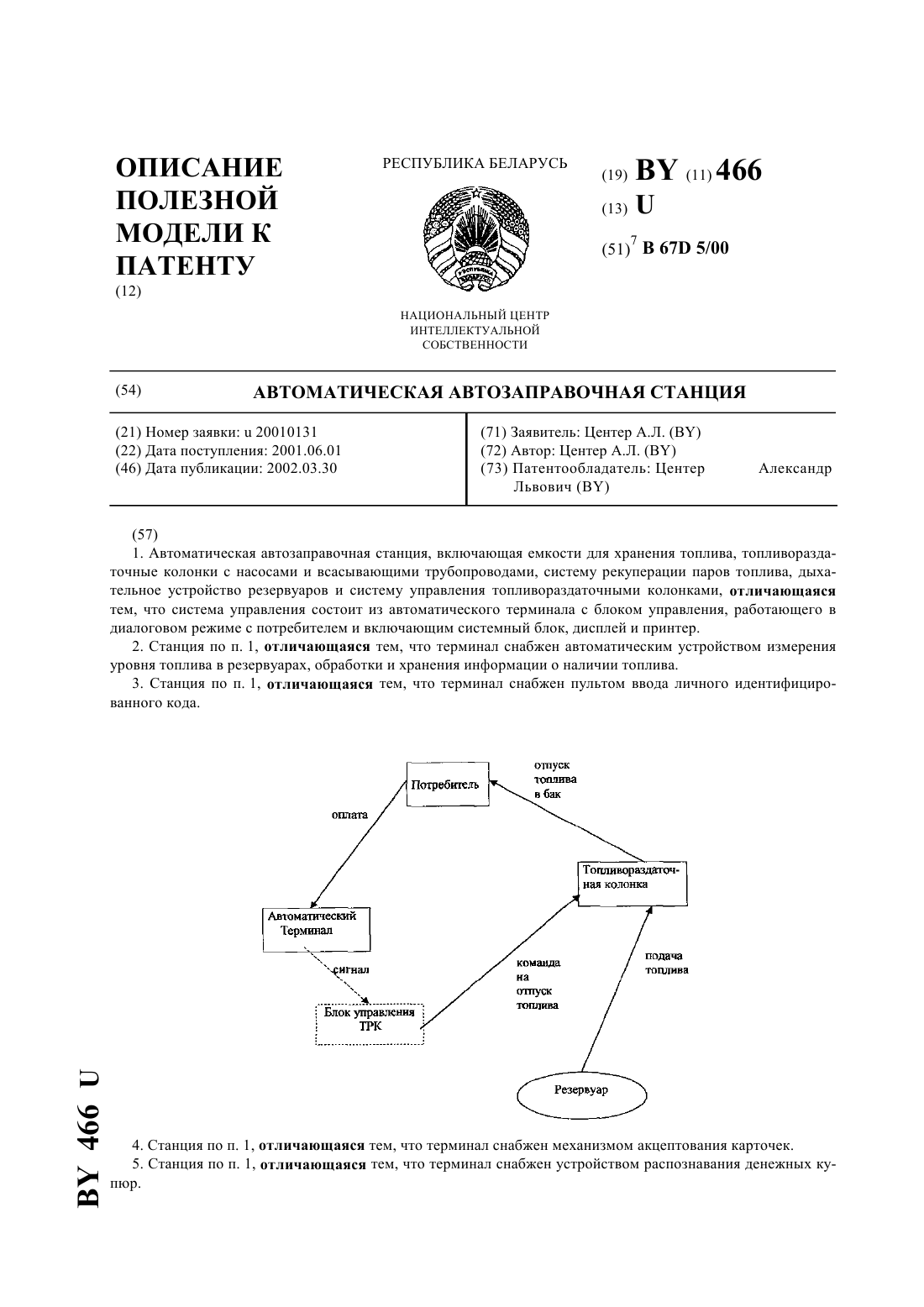
Номер патента: U 466
Опубликовано: 30.03.2002
Автор: Центер Александр Львович
МПК: B67D 5/00
Метки: автоматическая, станция, автозаправочная
Текст:
...топлива в резервуарах, обработки и хранения информации о наличии топлива в автозаправочной станции терминал снабжен пультом ввода личного идентифицированного кода в автозаправочной станции терминал снабжен механизмом акцептования карточек в автозаправочной станции терминал снабжен устройством распознавания денежных купюр в автозаправочной станции терминал снабжен устройством сохранения данных по расчетным операциям с клиентом и отпуском...
Телекоммуникационная система, способ дальней связи и ретрансляционная станция для телекоммуникационной системы.
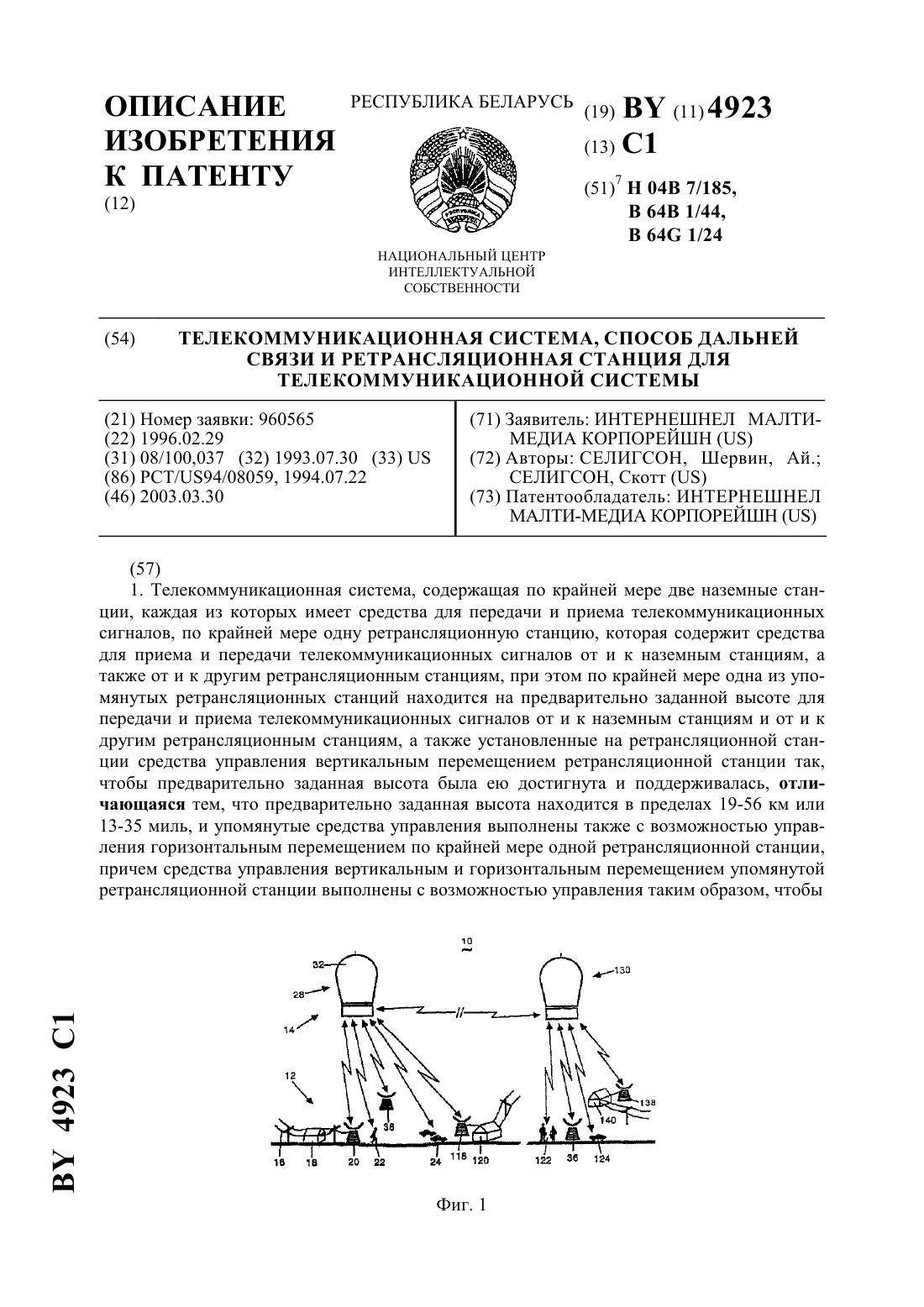
Номер патента: 4923
Опубликовано: 30.03.2003
Авторы: СЕЛИГСОН, Шервин, Ай., СЕЛИГСОН, Скотт
МПК: B64B 1/44, H04B 7/185, B64G 1/24...
Метки: телекоммуникационная, связи, телекоммуникационной, способ, ретрансляционная, дальней, станция, система, системы
Текст:
...быть в значительной мере решены путем применения телекоммуникационной инфраструктуры, использующей долговечные высотные возвращаемые телекоммуникационные станции, которые могут находиться на месте и которые расположены на суборбитальном самолете, а также имеют возможности для приема телекоммуникационных сигналов с наземной станции и ретрансляции их на другие подобные станции или на последующие наземные станции. Поскольку распространение...
Насосная станция
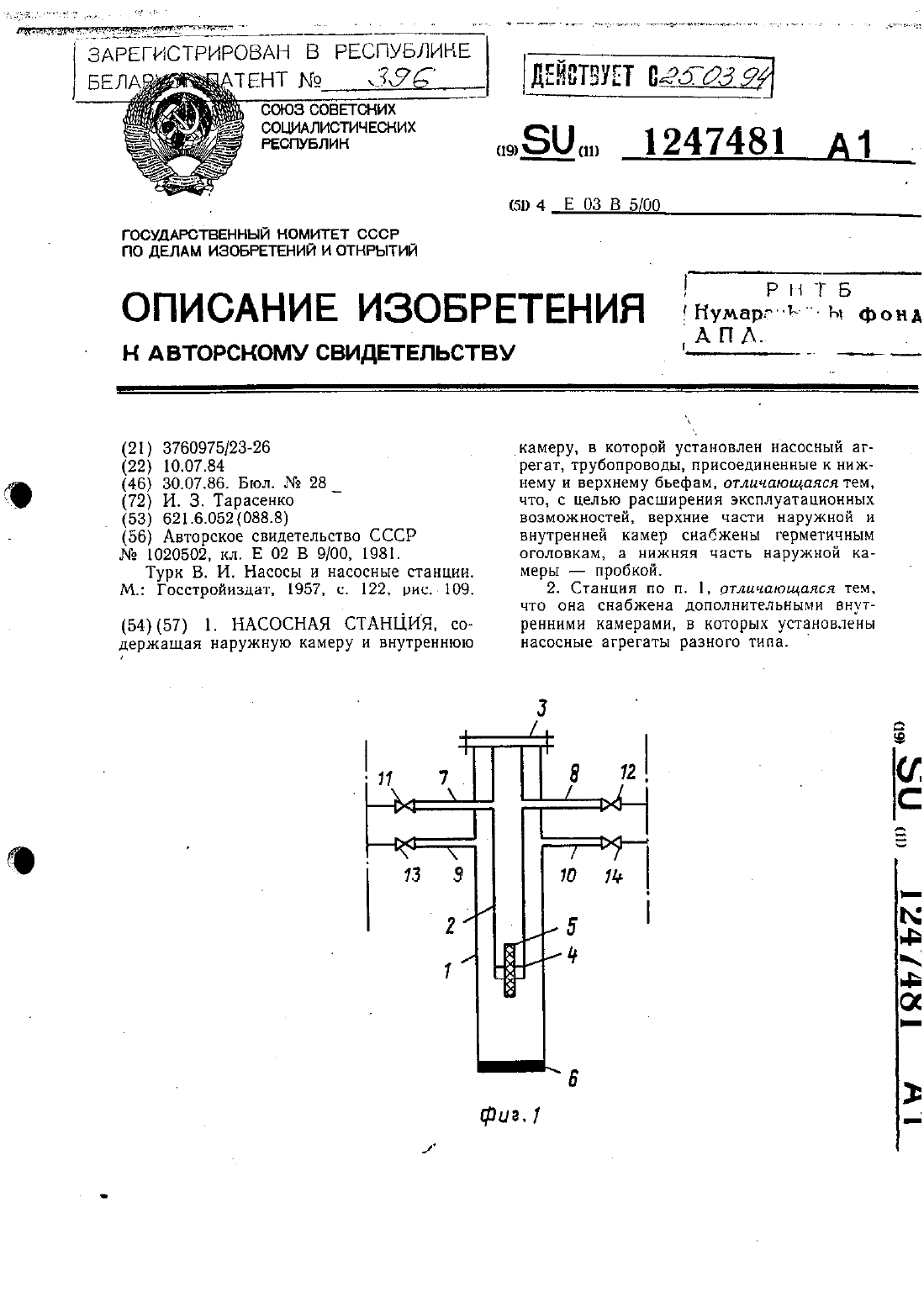
Номер патента: 396
Опубликовано: 30.03.1995
Автор: Тарасенко Игорь Захарович
МПК: E03B 5/00
Текст:
...9 ОНЗ ПОСТУПЗЕТ В ЗОНУ ВСЭСЫВЕНИЯ между внутренней 2 и наружной 1 камерами. Затем насосным агрегатом 5 вода под напором перекачивается во внутреннюю камеру (зону нагнетания) и далее по трубопроводу 8 в верхний бьеф (водоприемник). Затворы 12 и 13 открыты, а затворы 11 и 14 закрыты. При обратной подаче воды из верхнего бьефа в нижний по трубопроводу 10 во 53121 ЕЮСТХПНВТ Н наружнучо КЦМЩЛу 1. 113 КОТОрой птасслсттьпм агрегатом б...
Автоматизированная станция кормления коров
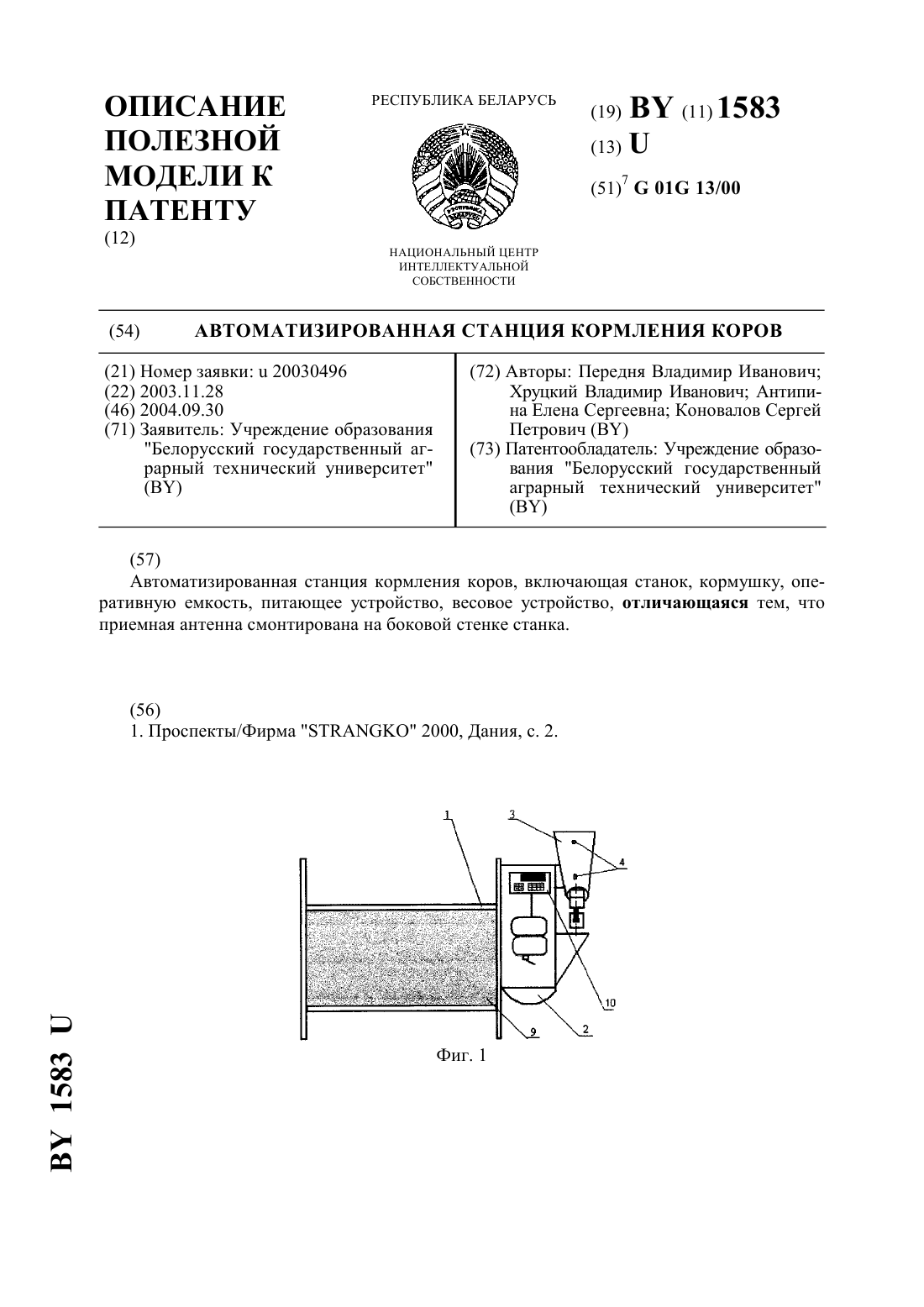
Номер патента: U 1583
Опубликовано: 30.09.2004
Авторы: Коновалов Сергей Петрович, Антипина Елена Сергеевна, Передня Владимир Иванович, Хруцкий Владимир Иванович
МПК: G01G 13/00
Метки: автоматизированная, коров, кормления, станция
Текст:
...номера животного начинается, как только корова начинает входить в станок, т.е. пока животное подойдет к кормушке, корм начинает подаваться и сыпаться в кормушку. Кроме уменьшения времени ожидания данная полезная модель имеет еще одно достоинство унификация приемной антенны, т.е. ее можно использовать для идентификации и в доильных установках с доением на доильной площадке. На фиг. 1 изображена автоматизированная станция кормления -...
Предыдущий патент: Способ хирургического лечения больных с долихоколон и хроническим колостазом
Следующий патент: Способ бурения скважин с обратной промывкой и установка для его осуществления
Случайный патент: Движитель вездехода