Полуактивная радиолокационная станция
Номер патента: 6319
Опубликовано: 30.06.2004
Авторы: Гейстер Сергей Романович, Курлович Виктор Иванович, Шаляпин Сергей Валентинович, Охрименко Александр Евгеньевич, Романов Алексей Валерьевич, Давыденко Игорь Николаевич, Ежов Сергей Юрьевич, Бондарь Дмитрий Владимирович, Юрцев Олег Анатольевич, Пучило Александр Викентьевич, Папушой Виталий Иванович
Текст
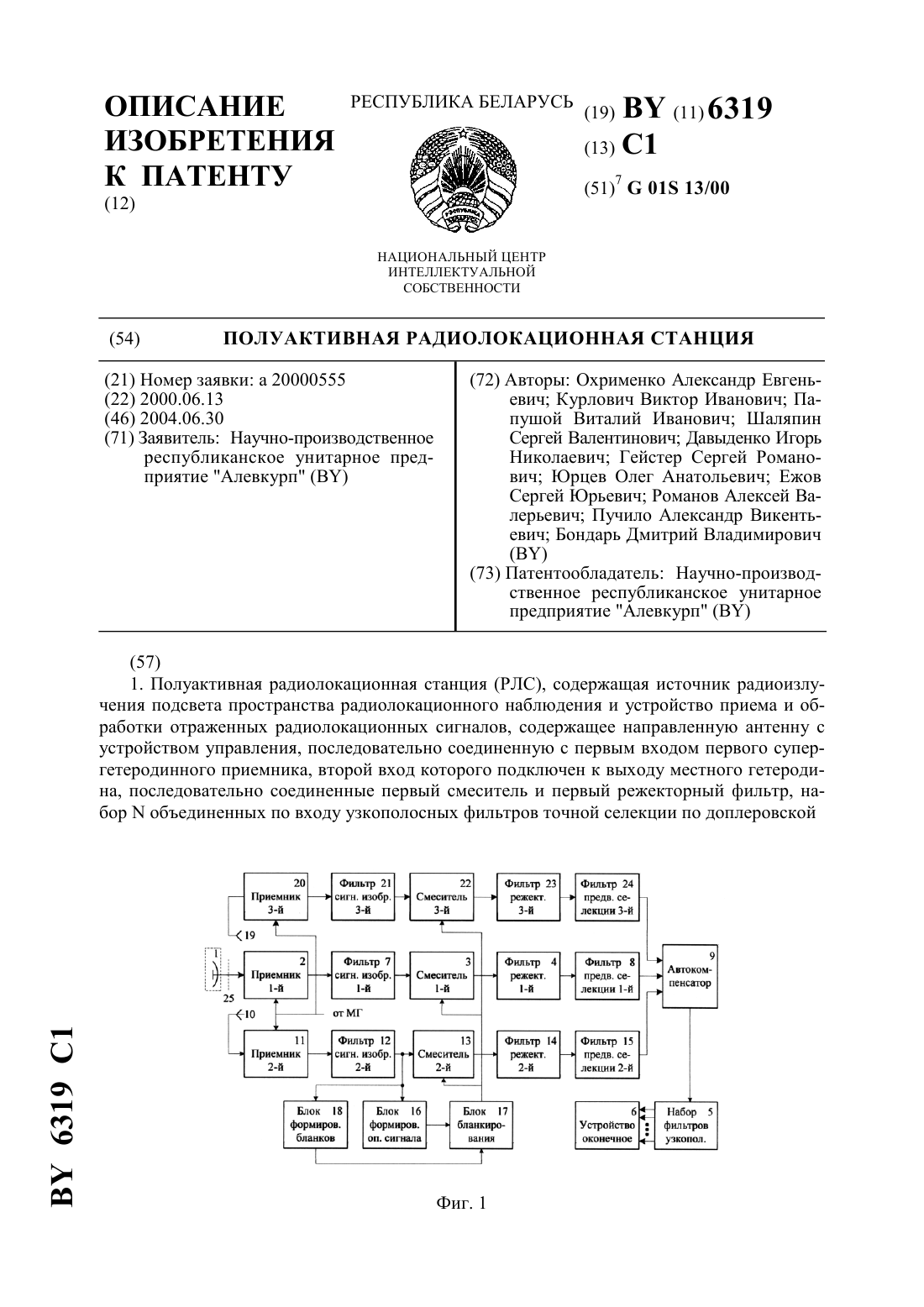
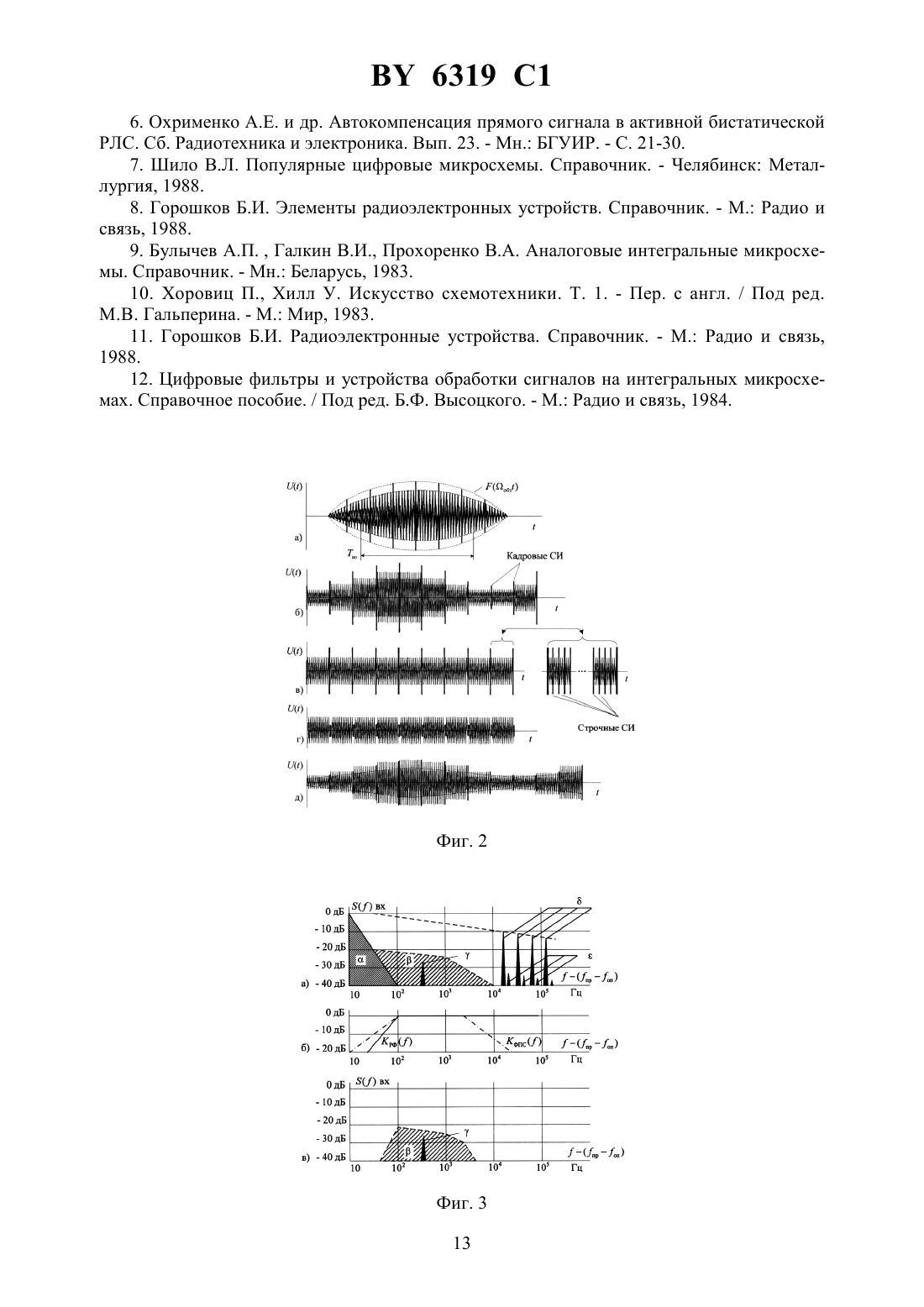
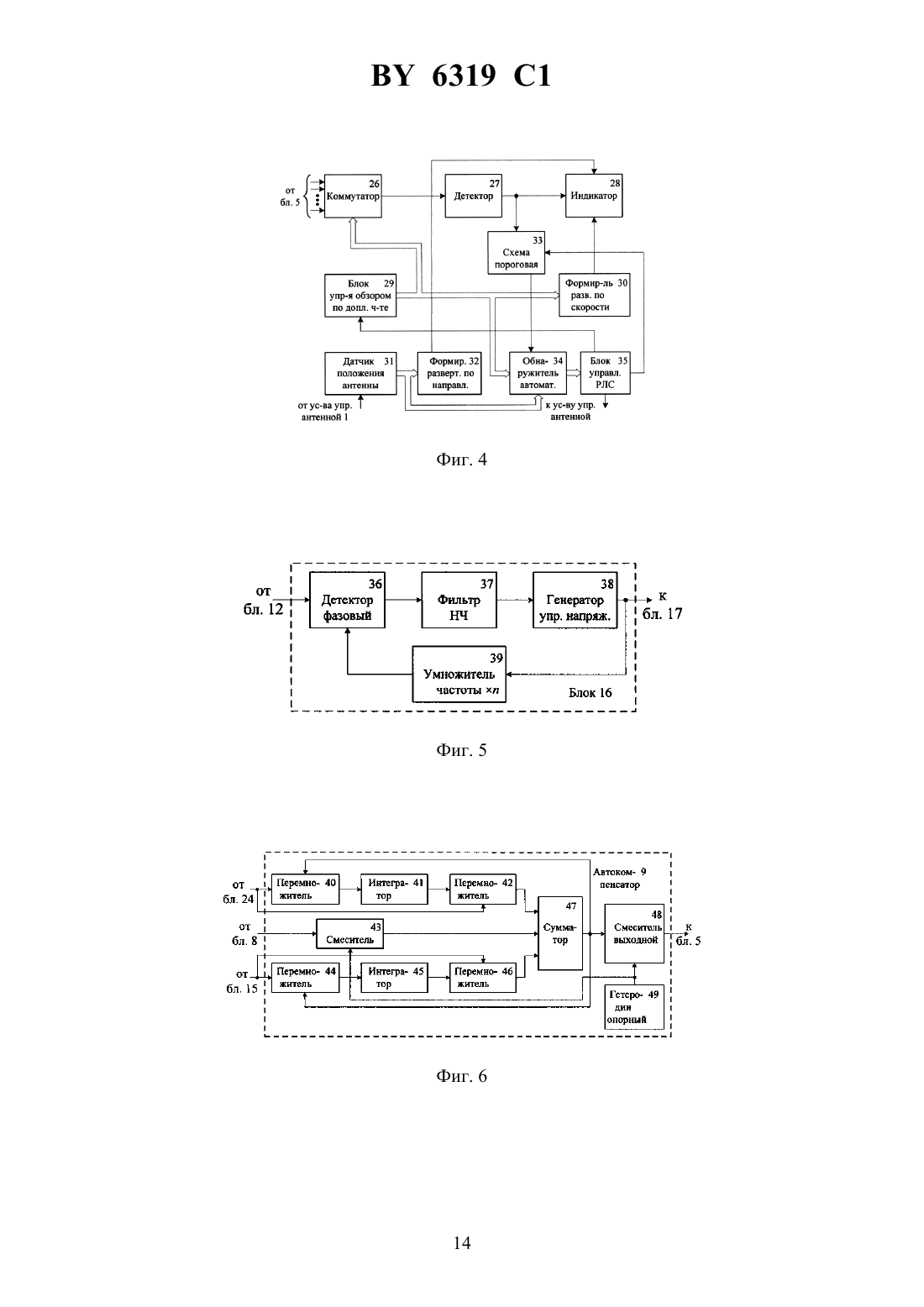
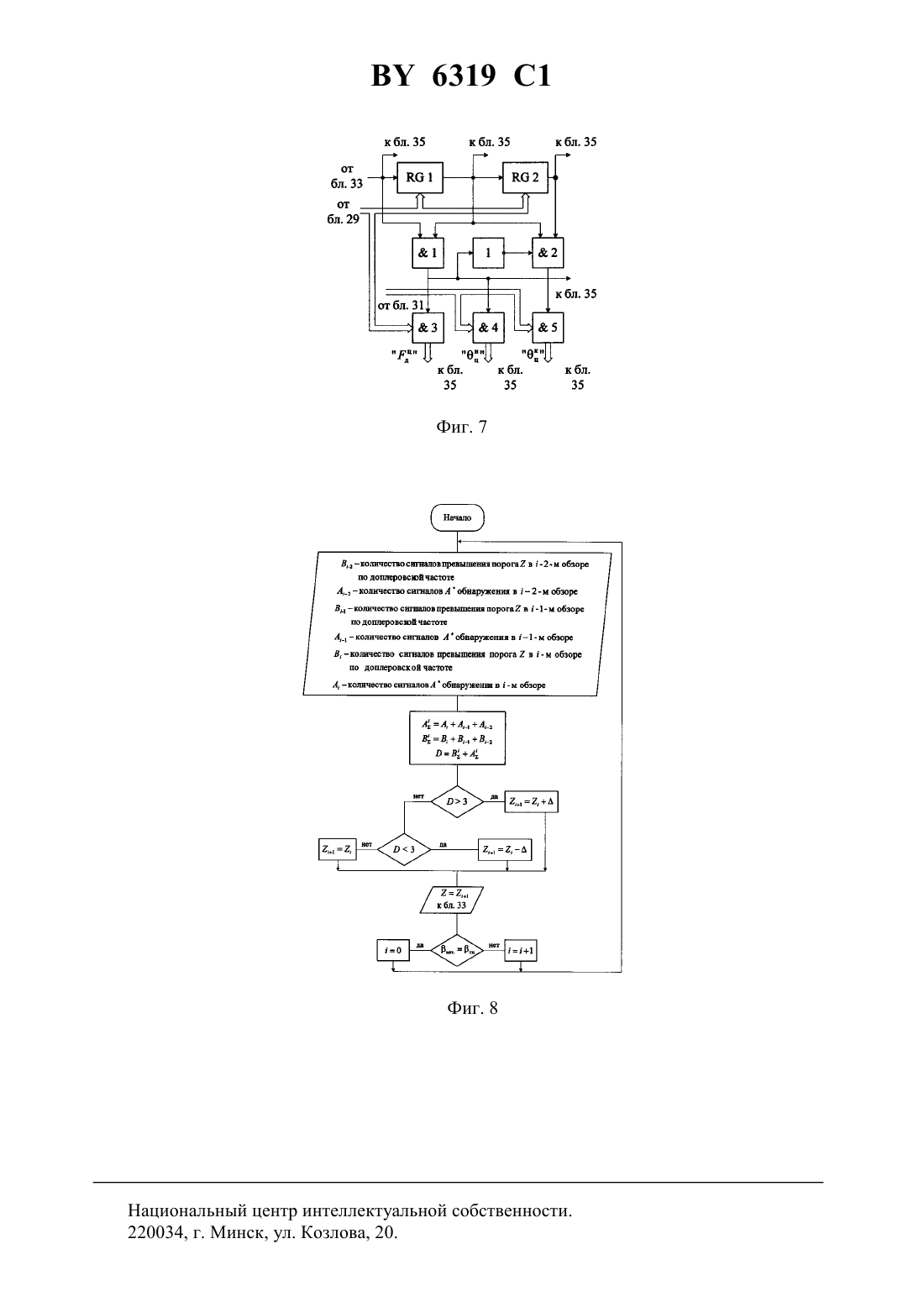
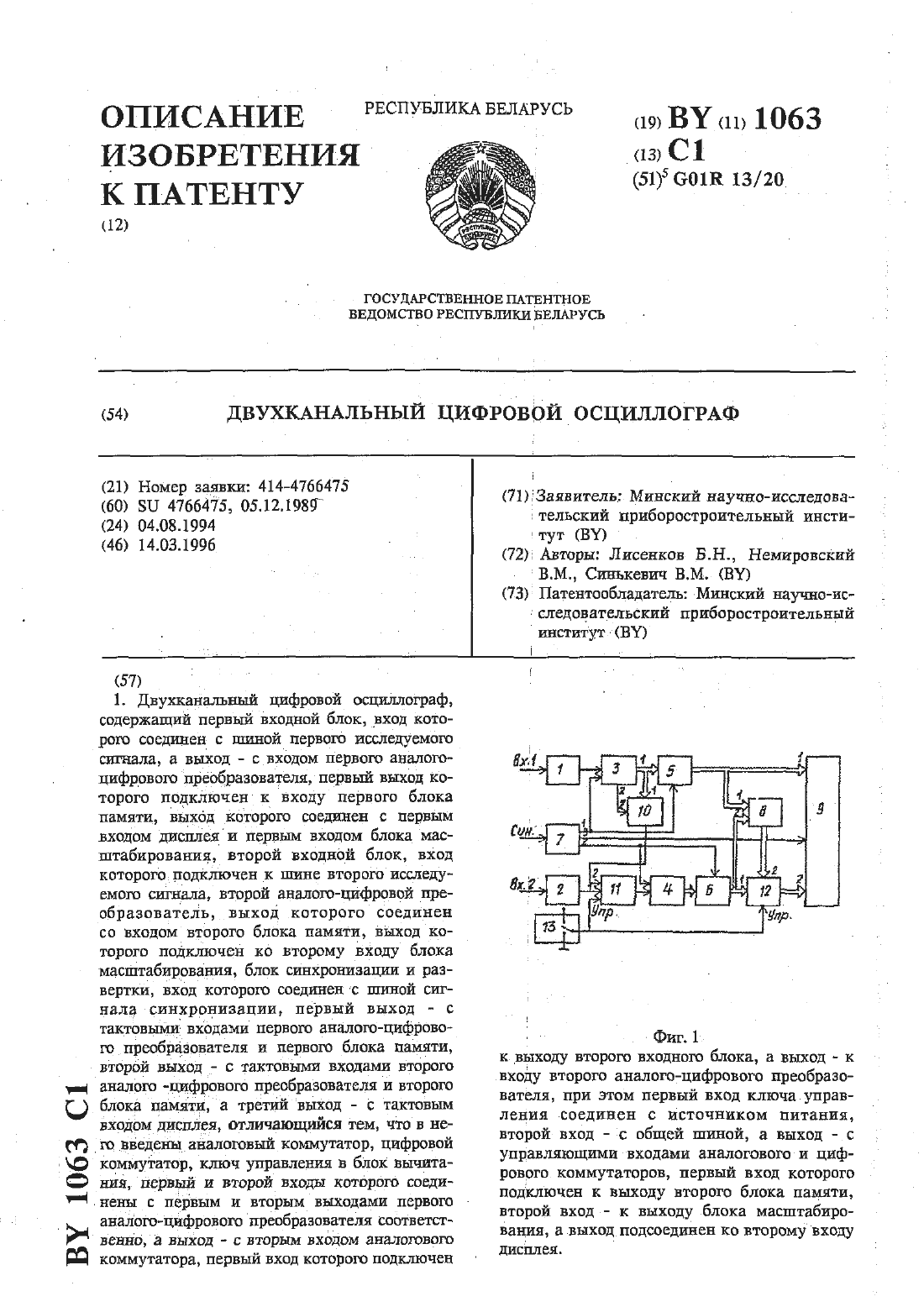
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Научно-производственное республиканское унитарное предприятие Алевкурп(72) Авторы Охрименко Александр Евгеньевич Курлович Виктор Иванович Папушой Виталий Иванович Шаляпин Сергей Валентинович Давыденко Игорь Николаевич Гейстер Сергей Романович Юрцев Олег Анатольевич Ежов Сергей Юрьевич Романов Алексей Валерьевич Пучило Александр Викентьевич Бондарь Дмитрий Владимирович(73) Патентообладатель Научно-производственное республиканское унитарное предприятие Алевкурп(57) 1. Полуактивная радиолокационная станция (РЛС), содержащая источник радиоизлучения подсвета пространства радиолокационного наблюдения и устройство приема и обработки отраженных радиолокационных сигналов, содержащее направленную антенну с устройством управления, последовательно соединенную с первым входом первого супергетеродинного приемника, второй вход которого подключен к выходу местного гетеродина, последовательно соединенные первый смеситель и первый режекторный фильтр, наборобъединенных по входу узкополосных фильтров точной селекции по доплеровской 6319 1 частоте, выходы которых подключены к соответствующим сигнальнымвходам оконечного устройства РЛС, отличающаяся тем, источник радиоизлучения подсвета пространства радиолокационного наблюдения выполнен в виде наземного телевизионного (ТВ-) транслятора диапазона метровых и дециметровых волн, а устройство приема и обработки отраженных радиолокационных сигналов содержит первый фильтр сигналов изображения, вход которого подключен к выходу первого супергетеродинного приемника, а выход соединен с сигнальным входом первого смесителя, первый фильтр предварительной селекции, выход которого подключен к первому входу автокомпенсатора, выход которого подключен ко входу набораузкополосных фильтров точной селекции, причем вход первого фильтра предварительной селекции подключен к выходу первого режекторного фильтра, первую дополнительную антенну, соединенную с первым входом второго супергетеродинного приемника, выход которого подсоединен ко входу второго фильтра сигналов изображения, выход которого соединен с первым входом второго смесителя, выход которого соединен со входом второго режекторного фильтра, выход которого подключен ко входу второго фильтра предварительной селекции, выход которого подключен ко второму входу автокомпенсатора, блок формирования опорного сигнала, выход которого подключен ко входу блока бланкирования, выход которого подключен к гетеродинным входам первого и второго смесителей, вход блока формирования опорного сигнала подключен к выходу второго фильтра сигналов изображения, объединенный по входу с блоком формирования опорного сигнала блок формирования бланков, выход которого подключен к управляющему входу блока бланкирования, вторую дополнительную антенну,соединенную с первым входом третьего супергетеродинного приемника, выход которого подключен к входу третьего фильтра сигналов изображения, выход которого подключен к входу третьего смесителя, выход которого связан со входом третьего режекторного фильтра, выход которого соединен со входом третьего фильтра предварительной селекции, выход которого подключен к третьему входу автокомпенсатора, причем второй вход третьего супергетеродинного приемника соединен с вторыми входами первого и второго супергетеродинных приемников, а гетеродинный вход третьего смесителя соединен с гетеродинными входами первого и второго смесителей, при этом первая и вторая дополнительные антенны направлены на наземный ТВ-транслятор и расположены неподвижно и симметрично относительно фазового центра направленной антенны, рабочая поляризация которой выбирается ортогональной рабочей поляризации ТВ-транслятора, между направленной антенной и наземным ТВ-транслятором размещен электродинамический экран,размеры которого и удаление от направленной антенны выбраны из условия экранирования зоны нулевых доплеровских частот в направлении на ТВ-транслятор, причем первый, второй, третий супергетеродинные приемники, фильтры сигналов изображения, смесители, режекторные фильтры, фильтры предварительной селекции соответственно идентичны, а второй и третий входы автокомпенсатора являются компенсационными. 2. Полуактивная радиолокационная станция по п. 1, отличающаяся тем, что оконечное устройство РЛС содержит детектор, выход которого подключен к первому входу двумерного индикатора направление-скорость, а вход - к выходу коммутатора навходов,которые являются сигнальными входами оконечного устройства РЛС, датчик положения направленной антенны, вход которого соединен с устройством управления направленной антенной, а выход - с формирователем развертки по направлению, выход которого подключен к третьему входу индикатора, последовательно соединенные блок управления обзором по доплеровской частоте и формирователь развертки по скорости, выход которого подключен ко второму входу индикатора, а выход блока управления обзором по доплеровской частоте соединен с управляющим входом коммутатора, схему пороговую, выход которой подключен к первому входу автоматического обнаружителя, выход которого подключен к блоку управления РЛС, первый выход которого подключен к пороговому входу схемы пороговой, второй выход - к управляющему входу блока управления обзором 2 6319 1 по доплеровской частоте, третий выход - к устройству управления направленной антенной, а сигнальный вход схемы пороговой соединен с выходом детектора, при этом второй вход автоматического обнаружителя подключен к выходу блока управления обзором по доплеровской частоте, а третий вход автоматического обнаружителя подключен к выходу датчика положения направленной антенны.(56) Основы радиолокации и радиоэлектронная борьба. Ч. 1. - М. Воениздат, 1983. - С. 251255.5239310 , 1993.2037842 1, 1995.2040008 1, 1995. Изобретение относится к области радиолокации и предназначено для радиолокационного наблюдения подвижных объектов, в первую очередь - воздушных маловысотных. Известны полуактивные радиолокационные станции (РЛС) с внешним источником радиоизлучения для подсвета области радиолокационного наблюдения 1 и РЛС с когерентной обработкой принятого радиолокационного сигнала 2, с. 254, определяющие радиальную скорость цели ц по величине измеряемого доплеровского смещения частоты 2 ц/ 2 , где- рабочая длина волны- бистатический угол источник подсвета - цель - РЛС ц - проекция вектора скорости цели на биссектрису бистатического угла. При этом в известных РЛС используют специальный источник радиоизлучения, в котором формируется специальный радиолокационный сигнал подсвета со средней мощностью до единиц-десятков кВт, которым одновременно или последовательно облучается область радиолокационного наблюдения. Работа такого источника в эфир, во-первых,приводит к возрастанию радиофона, во-вторых, демаскирует работу РЛС и ее рабочую частоту, в-третьих, характеризуется дополнительным значительным энергопотреблением. Целью изобретения является реализация возможности использования в интересах радиолокационного наблюдения действующих радиоизлучений нерадиолокационного назначения - излучений наземных телевизионных (ТВ-)трансляторов диапазона метровых или дециметровых волн на выбранных частотных каналах. При этом комплексный сигнал ТВ-трансляции, отраженный от движущегося объекта (цели), используется как полезный радиолокационный сигнал. Наиболее близкой заявляемому объекту является полуактивная РЛС с когерентной обработкой принятого сигнала 2, с. 254 с параллельным обзором по доплеровской частоте, которая содержит последовательно соединенные направленную антенну 1, супергетеродинный приемник 2, смеситель 3, режекторный фильтр 4, наборобъединенных по входу узкополосных фильтров точной селекции по доплеровской частоте 5,выходов которого подключены к соответствующим входам оконечного устройства 6, причем второй вход супергетеродинного приемника 2 подключен к выходу местного гетеродина, а второй вход смесителя соединен с выходом генератора опорного сигнала. В такой полуактивной РЛС отраженный радиолокационный сигнал принимается антенной 1, усиливается и преобразуется на промежуточную частоту в приемнике 2, в смесителе 3 осуществляется его демодуляция (частотная или фазовая) за счет перемножения с опорным сигналом, а режекторный фильтр 4 обеспечивает подавление мешающих отражений от неподвижных местных предметов. Сигналы, отраженные от подвижной цели, не попадают в частотную зону режекции фильтра 4 и фильтруются в соответствующем их доплеровской частоте узц д 6319 1 кополосном фильтре из набора 5, перекрывающих доплеровский диапазон частот наблюдаемых целей. Выходные сигналы узкополосных фильтров анализируются в оконечном устройстве 6 и сформированные оценки скорости и угловых координат представляются в виде, удобном для потребителя. Заметим, что для осуществления обзора по направлению или следящего сопровождения, положение ДНА РЛС управляется устройством управления антенной сканером 2,с. 263, механической системой вращения 2, с. 265, устройством управления ДНА ФАР 2, с. 269 или силовым антенным приводом 2, с. 407, 408. Однако применение в указанных целях такой РЛС неэффективно и проблематично вследствие следующих факторов а) комплексный ТВ-сигнал имеет достаточно сложный закон амплитудной и частотной модуляции - содержит кадровые и строчные синхроимпульсы (СИ), яркостный сигнал изображения, сигналы цветности и цветосинхронизации, а также ЧМ-сигнал звукового сопровождения, и не только существенно отличается от радиолокационных зондирующих сигналов, но и содержит случайные, априорно неизвестные компоненты (изображения,звукового сопровождения), которые воздействуют на устройство обработки как помеховые б) отраженный от цели ТВ-сигнал принимается антенной РЛС совместно с прямым сигналом ТВ-трансляции, проникающим по боковым лепесткам диаграммы направленности антенны (ДНА) РЛС, и действие этого сигнала, превышающего полезный на 70-90 дБ,является помеховым в) возникает также проблема реализации когерентной обработки радиолокационного сигнала, которая решается введением дополнительного приемного канала 5, 6, 7, но лишь при использовании специального радиолокационного сигнала, а некогерентная обработка, ввиду малой мощности отраженных радиолокационных сигналов, не обеспечивает их эффективного выделения. Для достижения заявленной цели при использовании действующего наземного источника ТВ-трансляции диапазона метровыхили дециметровых (ДМВ) волн, который осуществляет одновременный подсвет пространства радиолокационного наблюдения, в известное устройство обработки радиолокационных сигналов 2, с. 254, содержащее последовательно соединенные направленную антенну 1 с устройством управления и первый супергетеродинный приемник 2, второй (гетеродинный) вход которого подключен к выходу местного гетеродина, а также последовательно соединенные первый смеситель 3 и первый режекторный фильтр 4, а также набор 5 объединенных по входу взаимно расстроенных по частоте узкополосных фильтров точной селекции по доплеровской частоте, выходы которых подключены к соответствующимвходам оконечного устройства 6 РЛС,дополнительно введены (фиг. 1) во-первых, первый фильтр 7 сигналов изображения, вход которого подключен к выходу первого приемника 2, а выход соединен с сигнальным входом первого смесителя 3, а также последовательно соединенные первый фильтр 8 предварительной селекции и автокомпенсатор 9, выход которого подключен ко входу набора 5 узкополосных фильтров, а вход первого фильтра 8 предварительной селекции подключен к выходу первого режекторного фильтра 4 во-вторых, последовательно соединенные первая дополнительная антенна 10, второй супергетеродинный приемник 11, второй фильтр 12 сигналов изображения, второй смеситель 13, второй режекторный фильтр 14, второй фильтр 15 предварительной селекции,выход которого подключен ко второму входу автокомпенсатора 9, а также последовательно соединенные блок 16 формирования опорного сигнала и блок 17 бланкирования, выход которого подключен ко вторым (гетеродинным) входам первого и второго смесителей 3 и 13, а вход блока 16 формирования опорного сигнала подключен к выходу второго фильтра 12 сигналов изображения, и объединенный по входу с блоком 16 формирования опорного 4 6319 1 сигнала блок 18 формирования бланков, выход которого подключен ко второму (управляющему) входу блока 17 бланкирования в-третьих, последовательно соединенные вторая дополнительная антенна 19, третий супергетеродинный приемник 20, третий фильтр 21 сигнала изображения, третий смеситель 22, третий режекторный фильтр 23, третий фильтр 24 предварительной селекции, выход которого подключен к третьему входу автокомпенсатора 9, причем второй (гетеродинный) вход третьего приемника 20 соединен со вторыми входами первого и второго приемников, а гетеродинный вход третьего смесителя 22 объединен с гетеродинными входами первого и второго смесителей. При этом первая и вторая дополнительные антенны направлены на наземный ТВтранслятор и размещены неподвижно и симметрично относительно фазового центра антенны 1 РЛС, причем рабочая поляризация этой антенны ортогональна рабочей поляризации ТВ-транслятора, а между направленной антенной 1 РЛС и наземным ТВ-транслятором дополнительно размещен электродинамический экран 25, размеры которого и удаление от антенны 1 выбраны из условия экранирования зоны нулевых доплеровских частот в направлении на ТВ-транслятор, при этом первый, второй и третий приемники 2, 11 и 20, фильтры сигналов изображения 7, 12 и 21, смесители 3, 13 и 22, режекторные фильтры 4, 14 и 23, фильтры 8, 15 и 24 предварительной селекции соответственно идентичны, а второй и третий входы автокомпенсатора 9 являются компенсационными. РЛС работает следующим образом. Радиолокационный отраженный сигнал (фиг. 2 а),принятый в процессе обзора по направлению, выполняемого путем изменения положения ДНА 1, представляет собой комплексный сигнал ТВ-трансляции, смещенный относительно излучаемого ТВ-транслятором по времени нацтц цо ,где тц - расстояние от транслятора до цели цо - расстояние от цели до приемного устройства РЛС с - скорость света,и по частоте на 2 ц д/ 2 . Этот сигнал при обзоре по направлению также промодулирован по амплитуде перемещающейся ДНА 1 по закону (обз), где обз - угловая скорость перемещающейся ДНА,- ДНА РЛС, и имеет эффективную длительность ао, обз где- ширина ДНА РЛС в плоскости обзора. Вместе с этим сигналом по боковым (задним) лепесткам ДНА 1 РЛС принимается прямой сигнал (фиг. 2 б) ТВ-трансляции (проникающий), задержанный относительно из лучаемого напто , где то - расстояние от транслятора до приемного устройства обра ботки, не имеющий доплеровского смещения частоты (д 0) и превышающий радиолокационный сигнал на 70-90 дБ, причем этот сигнал промодулирован по амплитуде и фазе боковыми (задними) лепестками антенны 1 РЛС, осуществляющей обзор (или сопровождение цели) по направлению. Смесь этих сигналов, принятая антенной 1, действует на выходе приемника 2 на прот мг т межуточной частотепроо , гдео - частота ТВ-трансляции на выбранном канале мго - частота настройки местного гетеродина РЛС. 6319 1 Одновременно на выходе приемника 11 действует прямой сигнал ТВ-трансляции(фиг. 2 в), принятый первой дополнительной антенной 10, которая постоянно направлена на ТВ-транслятор, вследствие чего этот сигнал постоянен по амплитуде. Выходные сигналы идентичных приемников 2 и 11 поступают на выходы фильтров изображения 7 и 12 соответственно, где из комплексного телевизионного сигнала выделяются только компоненты изображения строчные и кадровые синхроимпульсы, несущая и яркостный сигнал изображения. При этом в блоке 18 из принятого прямого сигнала ТВтрансляции выделяются кадровые синхроимпульсы и формируются видеоимпульсы бланков, соответствующие кадровым синхроимпульсам по длительности и временному положению, а в блоке 16 формируется опорное колебание постоянной амплитуды и частотойоп , когерентное колебаниям несущей прямого сигнала, которое подавляется (бланкируется) в блоке 17 при воздействии видеоимпульсов бланкирования, соответствующих кадровым синхроимпульсам прямого ТВ-сигнала. Выходное колебание блока 17 (фиг. 2 г) представляет собой, таким образом, гармоническое колебание, когерентное прямому ТВсигналу, амплитуда которого уменьшается синхронно с воздействием кадровых синхроимпульсов прямого ТВ-сигнала. Это колебание поступает на гетеродинные входы смесителей 3, 13, 22, где перемножается с принятыми сигналами изображения. Вследствие воздействия такого бланкированного опорного колебания происходит преобразование частоты принятых сигналов на величинуоп и обеспечивается подавление самых интенсивных мешающих сигналов - кадровых синхроимпульсов прямого сигнала ТВ-трансляции (фиг. 2 д). В результате на выходе смесителя 3 в основном приемном канале образуются колебания на несущей частотепроп , содержащие следующие спектральные составляющие(фиг. 3 а) несущая сигнала изображения проникающего сигналасоставляющие спектра межстрочных и межкадровых флуктуаций (изменений) проникающего сигнала изображения , примыкающие к составляющейнесущая сигнала изображения отраженного радиолокационного сигнала , смещен 2 ц ная на величину д/ 2 спектральные составляющие строчных синхроимпульсовпроникающего сигнала на частотах 15.625 кГц относительнос примыкающими к ним составляющими спектра межстрочных флуктуаций изображения спектральные составляющиестрочных синхроимпульсов (СИ) отраженного радиоц локационного сигнала, смещенные на д относительно составляющих . Следует заметить, что на спектральной диаграмме (фиг. 3 а) не показаны спектральные составляющие кадровых синхроимпульсов проникающего сигнала на частотах 50 Гц относительно несущей, подавленные в смесителе 3, а также кадровых синхроимпульсов отраженного сигнала ввиду их малости даже в логарифмическом масштабе спектральные составляющие межстрочных и межкадровых флуктуации отраженного сигнала ввиду их малости. Также следует учесть, что изображенные соотношения по величине представлены с учетом подавления всех составляющих прямого сигнала за счет электродинамического экрана 25 и поляризационной режекции за счет ортогональной поляризации антенны 1 на 25-35 дБ. Эти сигналы поступают на вход режекторного фильтра 4, настроенного на частоту пр-оп, зона режекции которого (фиг. 3 б) соответствует спектральной составляющейи определяет диапазон нулевых доплеровских частот и соответственно скоростей необ 6 6319 1 наруживаемых целей. При этом осуществляется подавление несущей проникающего сигнала ТВ-трансляции - наиболее интенсивной из оставшихся спектральных составляющих мешающих сигналов. После этого сигнал поступает на вход фильтра 8 предварительной селекции, полоса пропускания которого (фиг. 3 б) соответствует диапазону доплеровских частот радиолокационных сигналов обнаруживаемых целей. При этом спектральные составляющиеи(фиг. 4 а), отстоящие от несущей на 15.625 кГц и более, в зону фильтрации не попадают и подавляются. Таким образом, сигнал на выходе фильтра 8 предварительной селекции содержит следующие спектральные составляющие (фиг. 3 в)- составляющие спектра межстрочных и межкадровых флуктуации сигнала изображения ц- несущая сигнала изображения отраженного сигнала на частоте д относительно 1. ао На выходах фильтров 15 и 24 предварительной селекции дополнительных приемных каналов действуют аналогичные сигналы, но представленные только спектральными составляющимимежстрочных и межкадровых флуктуации сигнала изображения прямого ТВ-сигнала. Следует подчеркнуть, что сигналы, соответствующие составляющимна выходах фильтров 8, 15, 24 взаимно коррелированы, т.к. порождаются одним и тем же прямым сигналом ТВ-трансляции, а соответствующие приемные каналы взаимно когерентны, благодаря использованию одних и тех же опорных колебаний, и идентичны. Вместе с тем,амплитуда и фаза проникающего сигнала на выходе основного приемного канала (фильтр 8) изменяется относительно сигналов на выходах дополнительных каналов (15 и 24) вследствие его модуляции боковыми (задними) лепестками ДНА 1 при производстве обзора по направлению или слежении за целью. Эти взаимно коррелированные сигналы поступают на входы автокомпенсатора 9, в котором путем двукратного вычитания осуществляется подавление спектральной составляющей сигналов(фиг. 3 в) межстрочных и межкадровых флуктуации, т.е. обеспечивается выделение полезного сигнала(фиг. 3 в) пр - оп с эффективной шириной спектра ц несущей сигнала изображения отраженного радиолокационного сигнала с частотой д относительно частотыпроп . Следует отметить, что подавление осуществляется путем вычитания (компенсации) выходных сигналов дополнительных каналов (фильтры 15 и 24), подключенных к компенсационным входам автокомпенсатора, из сигнала основного канала (фильтр 8), причем в автокомпенсаторе обеспечивается автоподстройка компенсационных сигналов по амплитуде и фазе 2, с. 317. Следует обратить внимание на существенность именно двукратного вычитания, что достигается использованием двух дополнительных компенсационных каналов, подключенных к автокомпенсатору, при симметричном относительно фазового центра основной антенны 1 расположении дополнительных антенн 12 и 21, направленных на ТВ-транслятор , что обусловлено специфическими корреляционными свойствами подавляемых сигналов 6. С выхода автокомпенсатора 9 выделенный сигнал несущей изображения отраженного радиолокационного сигнала поступает на набор 5 объединенных по входу взаимно расстроенных по частоте узкополосных фильтров точной селекции. Ширина полосы пропускания каждого из этих фильтровф определяет величину разрешающей способности РЛС по доплеровской частоте дф и, соответственно, по радиальной скорости ф . При этом фильтры взаимно расстроены на величину полосы пропускания 2 7 дд соответствует диапазону доплеровских частот на ф блюдаемых целей. Таким образом, при доплеровской частоте отраженного радиолокациц онного сигнала д на выходе соответствующего -го фильтра будет действовать отфильтрованный им сигнал несущейотраженного радиолокационного сигнала (фиг. 3 в). Выходыфильтров селекции по доплеровской частоте подключены к соответствующим входам оконечного устройства 6 РЛС. Структура и состав оконечного устройства определяются задачами, решаемыми РЛС в зависимости от ее предназначения. Соответственно оконечное устройство может выполнять различные функции отображение результатов радиолокационного наблюдения (результатов первичной обработки радиолокационных сигналов) в форме, удобной для оператора (потребителя) автоматическое обнаружение целей и отсчет координат, вторичную обработку координатной информации и отображение ее результатов в виде, удобном для оператора или передачу соответствующих данных потребителю по каналам связи в автоматическом режиме следящее сопровождение цели по направлению и (или) скорости, формирование точных оценок текущих координат цели и передачу соответствующих данных потребителю. Для случая использования заявляемого объекта как РЛС контроля воздушного пространства с последовательным обзором по направлению при параллельном обзоре по доплеровской частоте (скорости) оконечное устройство 6 РЛС содержит (фиг. 4) последовательно соединенные коммутатор 26 навходов, детектор 27, индикатор 28,причем входы коммутатора подключены к соответствующим выходам фильтров точной селекции набора 5, а названный вход индикатора является сигнальным последовательно соединенные блок 29 управления обзором по доплеровской частоте,формирователь 30 развертки по скорости, подключенный ко второму входу развертка по скорости индикатора 28, а управляющий вход коммутатора 26 соединен с выходом блока 29 управления обзором по доплеровской частоте. При этом в блоке 29 управления обзором в режиме обзора по доплеровской частоте(по скорости) формируется параллельный цифровой код, значение которого соответствует номеру фильтра точной селекции из набора 5, подключаемого в данный момент времени ко входу детектора. Таким образом, при смене значения кода от 1 доосуществляется последовательное подключение всехфильтров через детектор 27 к сигнальному входу индикатора. Поскольку синхронно с коммутацией фильтров, соответствующих различным доплеровским частотам, осуществляется формирование развертки индикатора 28 в блоке 30, то положение отметки (амплитудной или яркостной), которая обусловлена сигналом с выхода детектора 27, на этой развертке будет соответствовать доплеровской часц тоте цели д , и соответственно - ее радиальной скорости. Для отображения координат цели в системе направление - скорость дополнительно введены последовательно соединенные датчик 31 положения антенны, формирователь 32 развертки по направлению, выход которого подключен к третьему входу индикатора 28 развертка по направлению. При этом вход датчика 31 соединен с устройством управления антенной (спецвычислителем при использовании ФАР, сканером или силовым приводом). Таким образом, на выходе датчика действует цифровой параллельный код, соответствующий ориентации ДНА 1 в текущий момент времени, который преобразуется формирователем 32 в сигнал развертки по направлению, поступающий на соответствующий вход индикатора 28. Вследствие синхронности развертки положению антенны (при обзоре) положение отметки на индикаторе, обусловленной сигналом с детектора 27, будет 8 6319 1 соответствовать угловому положению ДНА 1 и, соответственно, направлению на цель (по азимуту или углу места). Следует заметить, что обзор по доплеровской частоте - поочередное подключение узкополосных фильтров из набора 5 - осуществляется быстрее, чем обзор по направлению перемещение ДН антенны 1. Поэтому развертка по скорости на индикаторе 28 в растровом варианте осуществляется строчная (вертикальная или горизонтальная), а развертка по направлению - кадровая (горизонтальная или вертикальная, соответственно). Для автоматизации работы РЛС по обнаружению и измерению координат цели в оконечное устройство также введены последовательно соединенные схема 33 пороговая, автоматический обнаружитель 34 и блок 35 управления РЛС, причем сигнальный вход схемы пороговой подключен к выходу детектора 27, а пороговый вход - к первому выходу блока 35 управления РЛС, также второй и третий входы обнаружителя 34 соединены соответственно с выходами блоков 29 управления обзором по доплеровской частоте и датчика 31 положения антенны. Если величина сигнала с выхода фильтра из набора 5, подключенного в ходе обзора через коммутатор 26 и детектор 27 к пороговой схеме 33, превышает пороговый уровень,то на выходе схемы 33 пороговой формируется сигнал превышения порога, поступающий на вход обнаружителя 34, в котором выделяются действующие в этот момент времени ц значения кодов доплеровской частотыди направлениян . Так как за время проц странственного контакта с целью ао может иметь местообзоров по скорости и соответственно сформируетсясигналов превышения порога, то итоговое решение о наличии цели А в обнаружителе принимается по критериюиз ,также выделяется значение кода направленияк , при котором последний раз наблюдается сигнал превышения поц ц ц рога на частоте д и выделенные значения кодовд ,к ,нвыдаются в блок 35 ц ц управления РЛС. В блоке 35 определяется значение углового направления на целькн ц цц и может осуществляться 2 передача этих данных внешнему потребителю переход в режим слежения за целью путем формирования управляющих сигналов на устройство управления антенной РЛС и в блок 29 управления обзором по доплеровской частоте формирование порогового уровня для схемы 33 пороговой, обеспечивающего заданную достоверность обнаружения (радиолокационного наблюдения). Описание изобретения поясняется следующими графическими материалами фиг. 1 - блок-схема заявляемого объекта фиг. 2 - временные диаграммы, поясняющие бланкирование кадровых синхроимпульсов проникающего сигнала фиг. 3 - спектральные диаграммы, поясняющие процесс фильтрации спектральных составляющих сигнала фиг. 4 - блок-схема оконечного устройства РЛС фиг. 5 - блок-схема формирователя опорного сигнала фиг. 6 - блок-схема автокомпенсатора фиг. 7 - пример выполнения автоматического обнаружителя 34 фиг. 8 - пример алгоритма формирования адаптивного порога обнаружения. Все блоки и узлы заявляемой РЛС реализуется известными способами на основе известных технических решений или вычислительных процедур антенны 1 с устройством управления, 10, 19, приемники 2, 11, 20 (содержащие усилит мг тель высокой частоты, смеситель, преобразователь частоты напр 00 и предвари 9 6319 1 тельный усилитель промежуточной частоты), смесители 3, 13, 22 достаточно известны и вполне описаны в научно-технической литературе и используются в радиотехнике, в т.ч. в ТВ-приемниках, фильтры 7, 12, 21 аналогичны используемым в ТВ-технике для выделения сигналов изображения в ТВ-приемниках блок 16 формирования опорного сигнала (фиг. 5) представляет собой известную схему фазовой автоподстройки частоты - ФАПЧ 7 с. 274, причем, если оппр/, в обратной связи используется умножитель частоты враз, а фазовый детектор 36, фильтр 37 НЧ,генератор 38 управляемый и умножитель 39 частоты враз, описаны в литературе 8, 11 блок 18 формирования бланков может быть выполнен аналогично схемам выделения синхроимпульсов ТВ-приемников, а блок 17 бланкирования может быть выполнен на основе известных временных селекторов промежуточной частоты с использованием ключей 7, 9 или с использованием амплитудных модуляторов 8, 11 режекторные фильтры 4, 14, 23 и полосовые фильтры 8, 15, 24 при аналоговой реализации обработки выполняются согласно 8, 10, 11 или в цифровом виде 12 автокомпенсатор 11 (фиг. 6) выполняется с использованием известной схемы 2,рис. 12, 15, но для обеспечения двукратного вычитания используется два компенсационных канала, при этом перемножители 40, 42, 44, 46 и смесители 43, 48 - известные в радиотехнике узлы, в т.ч. выпускаемые в интегральном исполнении 9, при этом на гетеродинные входы смесителей 43 и 48 от гетеродина 49 опорного поступает постоянное по амплитуде колебание частотой 0 и в смесителе 43 входном осуществляется преобразование частоты входного сигнала на пр - оп - 0, а в смесителе 48 выходном - обратное преобразование на пр - оп (заметим, что последнее преобразование может и не производиться, но тогда смещение по частоте на 0 должно быть учтено в частотах настройки фильтров набора 5 точной селекции по доплеровской частоте), интеграторы 41 и 45 автокомпенсатора представляют собой узкополосные фильтры, настроенные на частоту 0, а их полоса пропускания определяет быстродействие автокомпенсатора, и они могут быть выполнены в аналоговом виде как узкополосные радиофильтры 8 или в цифровом виде 12, а сумматор 47 может быть, например, реализован на основе операционного усилителя в соответствующем включении 10, с. 166, гетеродин 49 частоты 0 и другие опорные генераторы выполняются по известным схемам генераторов гармонических радиоколебаний 8, 11 узкополосные фильтры точной селекции набора 5 также реализуемы в аналоговом или цифровом виде, как это описано в технической литературе 10, 12. Элементы оконечного устройства (фиг. 4) также реализуются с использованием известных схем коммутатор 26 представляет собойобъединенных по выходу ключей, управляющие входы которых подключены к соответствующим выходам дешифратора, преобразующего параллельный цифровой код от блока 29 управления обзором в позиционный, при этом в соответствии со значением цифрового управляющего кода от блока 29 на соответствующем выходе дешифратора действует сигнал логической 1, который открывает соответствующий ключ, а выходы ключей могут объединяться посредством -входового сумматора или аналогового эквивалента схемы ИЛИ блок 29 управления обзором по доплеровской частоте может быть выполнен в виде последовательно соединенных генератора тактовых импульсов и счетчика с параллельным выходом (например, 561 ИЕ 11), причем разрядность счетчикадолжна обеспечивать формирование кода 2, после чего счетчик обнуляется, а период следования тактовых импульсоввыбирается из условия обеспечения времени обзора по доплеровской частотеи соответствует времени коммутации сигнала с выхода фильтра точной селекции на выход блока 26 детектор 27 - известный амплитудный детектор 8, 11 10 6319 1 индикатор 28 - известный двумерный индикатор с растровой или радиально-круговой разверткой и яркостной индикацией по сигнальному входу от блока 27, при этом формирователи разверток по скорости 30 и направлению представляют собой известные преобразователи цифрового параллельного кода в напряжение (при электростатическом управлении лучом) или в ток (при электромагнитном управлении) и могут содержать цифроаналоговый преобразователь 8 и преобразователь напряжение-ток 10 датчик 31 положения антенны является известным преобразователем угол поворота код, подключенным к антенному приводу или сканеру, или же может быть использован выходной код спецвычислителяуправления ФАР схема 33 пороговая может быть построена с использованием операционного усилителя в компараторном включении и специализированных пороговых схем в интегральном исполнении (например 597 СА 2 9) с фиксированным порогом или адаптивно формируемым в блоке 35 управления РЛС. Автоматический обнаружитель 34 может быть реализован на базе ЭВМ программным методом или аппаратным методом как спецвычислитель. Как отмечено ранее, он должен реализовывать следующие операции принятие решения о наличии цели заобзоров во время пространственного контакта по алгоритмуиззафиксировать значения кодов углового положения антенны в началени конце цкпространственного контакта с целью ц зафиксировать значение доплеровской частоты обнаруженного радиолокационного ц сигналад . Пример функциональной схемы обнаружителя для случая, когда за время пространственного контакта осуществляется 3 обзора по доплеровской частоте, представлен на фиг. 7. Сигналы превышения порога от блока 33 поступают на последовательно соединенные сдвиговые регистры 1 и 2, управление которыми осуществляется параллельным цифровым кодом обзора по доплеровской частоте от блока 29. Каждый регистр обеспечивает общий сдвиг на(по числу фильтров точной селекции по доплеровской частоте) тактов синхронно с процессом обзора по доплеровской частоте. Если сигналы превышения порога в двух соседних периодах обзора совпадают, т.е. соответствуют одному и тому же фильтру точной селекции, то на выходе блока 1 сформируется сигнал решения А о наличии цели. Этот сигнал через блок схем И 3 выделит соответствующее значение ц кода доплеровской частотыди, одновременно, значение кода направлениянчерез ц блок схем И 4, также соответствующие моменту обнаружения. Таким образом, реализуется принятие решения по алгоритму 2 из 3-х. По завершении пространственного контакта с целью, когда сигнал превышения порога в соответствующем элементе разрешения по доплеровской частоте уже отсутствует, на выходе блока 2 сформируется решение о прекращении наблюдения цели, которое через блок 5 выделит значение кода направленияк . Заметим, что аналогичным образом могут быть реализованы в реальц ном масштабе времени иные алгоритмы принятия решений, в т.ч. программным методом. Блок 35 управления РЛС, как следует из описания, выполняет следующие функции а) вычисление направления на цельцпо значения коданиккак ц ц б) пересчет значения доплеровской частотыдв радиальную скорость ц 6319 1 в) хранение в ОЗУ и выдачу данных о координатах целей, обнаруженных в процессе обзора по направлению г) адаптивное формирование порогового уровня, поступающего на пороговый вход схемы 33 д) при необходимости переход в режим сопровождения или подслеживания обнаруженной цели и управление РЛС в процессе сопровождения. Все указанные функции могут быть реализованы с использованием универсальной ЭВМ программным методом или же аппаратным методом при использовании спецвычислителя. При этом вычислительные операции по п. а и б стандартные, операция по п.в реализуется с использованием известных ОЗУ известными способами. Адаптивное формирование порога может быть осуществлено по различным алгоритмам, например Если количество ложных превышений порога за один обзор превышает 12, то пороговый уровень увеличивают на некоторую величину , иначе - уменьшают на величину . Для этого соответствующий вход блока 35 управления РЛС подключают к выходу схемы 33 пороговой. При этом ложные превышения порога определяются как те, по которым не принято решение А об обнаружении цели. Блок-схема такого алгоритма изображена на фиг. 8. Управление режимом сопровождения (подслеживания) может осуществляться, например, через связи блока 35 на блок 29 и устройство управления антенной. Под слеживание по доплеровской частоте может быть осуществлено путем подачи на счетчик блока 29 сигнала обратного счета длительностью (1)Т после принятия решения об обнаружении или получении кодак , при этом следует использовать реверсивный счетчик. ц При подслеживании обзор по доплеровской частоте ограничивается, таким образом, одц ним-двумя элементами разрешения относительнод . Способ управления антенной при подслеживании определяется построением антенной системы и способом обзора при использовании ФАР - путем выдачи на спецвычислитель ФАР команды возврата в соответствующее предыдущее положение антенны после сформирования кодакц при использовании электромеханического сканирования ДНА 1 - выдачей команды реверса на систему управления сканером при механическом обзоре - команды реверса на силовой привод антенны. Таким образом, ДНА после завершения пространственного контакта с целью будет двигаться каждый раз в обратном направлении, перейдя на подслеживание цели в автоматическом режиме в пределах ц. В зависимости от назначения РЛС процесс ее управления, смены режимов, сопряжения с потребителями радиолокационной информации может быть построен иными способами путем реализации известных алгоритмов вторичной и третичной обработки. Таким образом, заявляемая РЛС может быть реализована с использованием известных узлов, алгоритмов и вычислительных процедур, т.е. является промышленно применимой. Источники информации 1. Черняк , Заславский Л.П. , Осипов Л.В. Многопозиционные радиолокационные станции и системы. Сб. Зарубежная радиоэлектроника. - 1987. -1. 2. Основы радиолокации и радиоэлектронная борьба. Ч. 1. / Под ред. А.Е. Охрименко. М. Воениздат, 1983. 3., -. - 1982. -2. - .52. 4... - , , 1980. 5. .,. - , , 1979. 12 6319 1 6. Охрименко А.Е. и др. Автокомпенсация прямого сигнала в активной бистатической РЛС. Сб. Радиотехника и электроника. Вып. 23. - Мн. БГУИР. - С. 21-30. 7. Шило В.Л. Популярные цифровые микросхемы. Справочник. - Челябинск Металлургия, 1988. 8. Горошков Б.И. Элементы радиоэлектронных устройств. Справочник. - М. Радио и связь, 1988. 9. Булычев А.П. , Галкин В.И., Прохоренко В.А. Аналоговые интегральные микросхемы. Справочник. - Мн. Беларусь, 1983. 10. Хоровиц П., Хилл У. Искусство схемотехники. Т. 1. - Пер. с англ. / Под ред. М.В. Гальперина. - М. Мир, 1983. 11. Горошков Б.И. Радиоэлектронные устройства. Справочник. - М. Радио и связь,1988. 12. Цифровые фильтры и устройства обработки сигналов на интегральных микросхемах. Справочное пособие. / Под ред. Б.Ф. Высоцкого. - М. Радио и связь, 1984. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01S 13/00
Метки: полуактивная, станция, радиолокационная
Код ссылки
<a href="https://by.patents.su/15-6319-poluaktivnaya-radiolokacionnaya-stanciya.html" rel="bookmark" title="База патентов Беларуси">Полуактивная радиолокационная станция</a>
Двухканальный цифровой осциллограф
Номер патента: 1063
Опубликовано: 14.03.1996
Авторы: Немировский Владимир Моисеевич, Лисенков Борис Николаевич, Синькевич Валентин Михайлович
МПК: G01R 13/20
Метки: цифровой, двухканальный, осциллограф
Текст:
...и 12, подключается выход блока 2 входного ко входу преобразователя 4, а выход блока 6 памяти - ко второму входу дисплея 9. В одноканальном режиме аналоювый коммутатор 11 отключает блок 2 входной и соединяет вход преобразователя 4 с выходом блока 10 вычитания, а цифровой коммутатор 12 кодов соединяет выход блока 8 масштабирования со вторым входом дисплея 9.В одноканальвом режиме работы цифровою осциллографа входной сигнал поступает на первый...
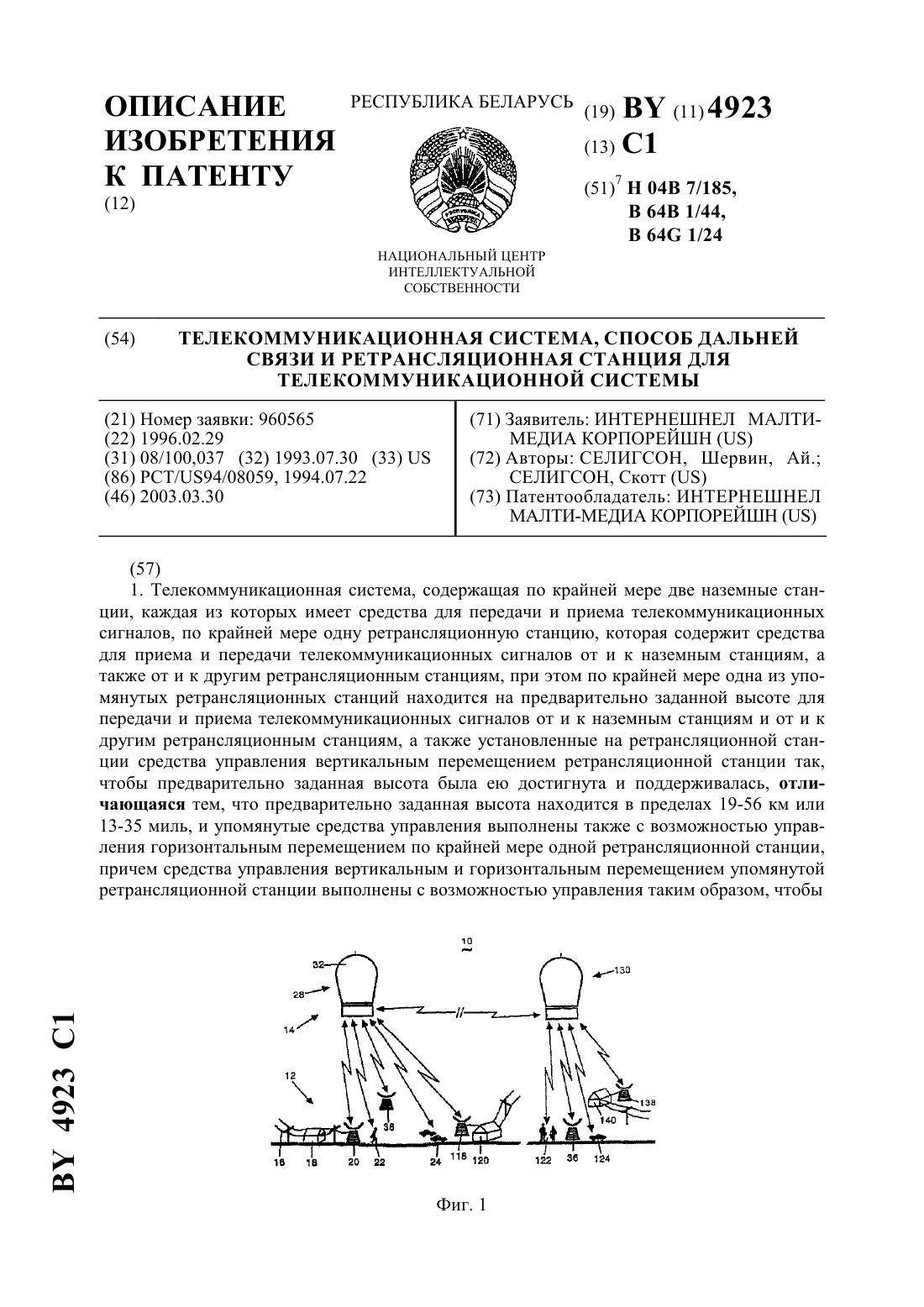
Телекоммуникационная система, способ дальней связи и ретрансляционная станция для телекоммуникационной системы.
Номер патента: 4923
Опубликовано: 30.03.2003
Авторы: СЕЛИГСОН, Шервин, Ай., СЕЛИГСОН, Скотт
МПК: B64B 1/44, H04B 7/185, B64G 1/24...
Метки: способ, дальней, телекоммуникационной, ретрансляционная, система, станция, связи, телекоммуникационная, системы
Текст:
...быть в значительной мере решены путем применения телекоммуникационной инфраструктуры, использующей долговечные высотные возвращаемые телекоммуникационные станции, которые могут находиться на месте и которые расположены на суборбитальном самолете, а также имеют возможности для приема телекоммуникационных сигналов с наземной станции и ретрансляции их на другие подобные станции или на последующие наземные станции. Поскольку распространение...
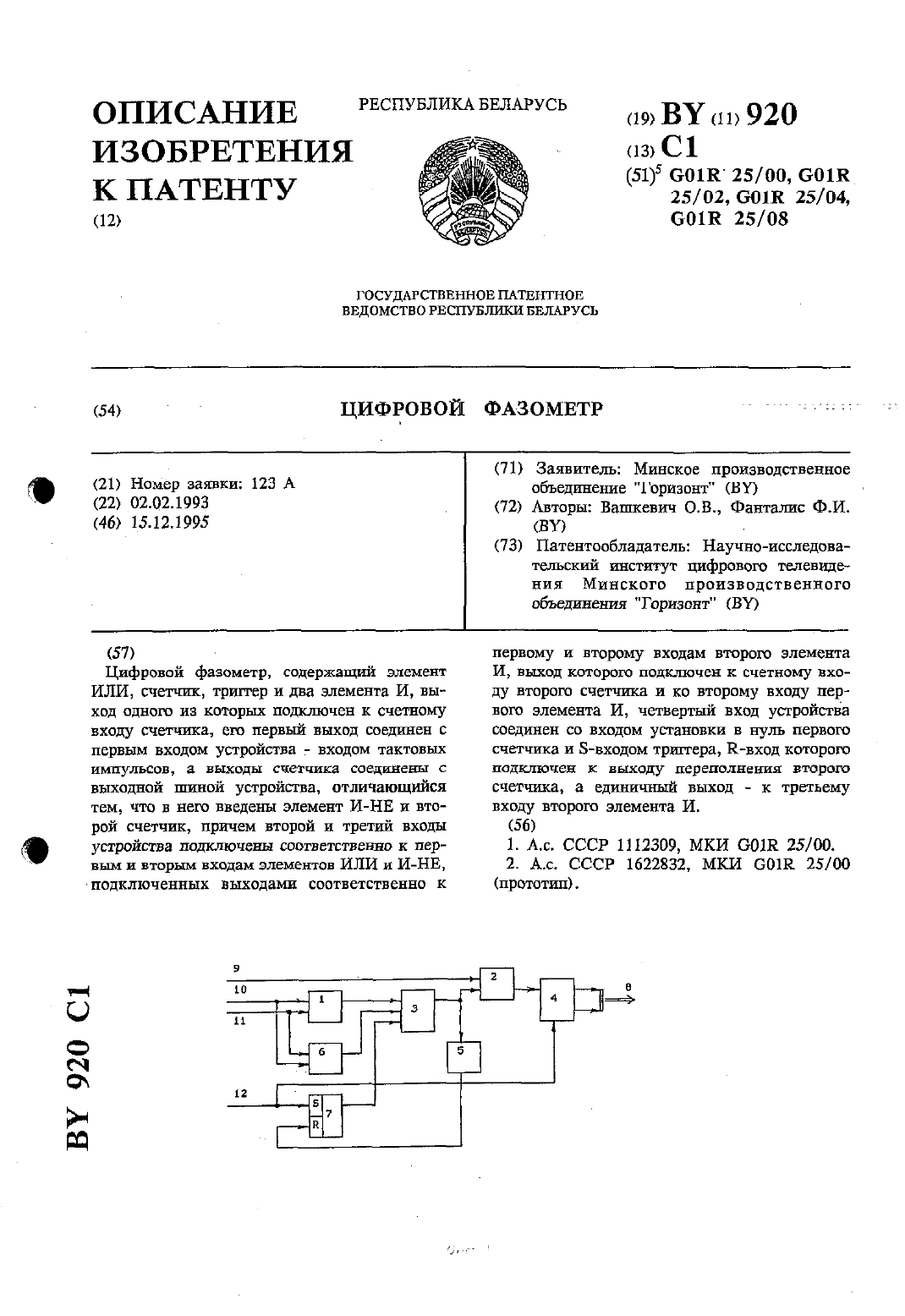
Цифровой фазометр
Номер патента: 920
Опубликовано: 15.12.1995
Авторы: Вашкевич Олег Васильевич, Фанталис Феликс Исаакович
МПК: G01R 25/02, G01R 25/00, G01R 25/04...
Текст:
...свпвпмъ ПОЗВОЛЯЭТ ИСКЛЮЧИТЬ ЛОЖНЫВ срабатывания ПРИ сдвигах факонтролируемых сигналов равных или более длительности сигналов.На оиг.1 представлена структурная схема цифрового фазометра.Циоровои фазометр состоит ив элемента ИЛИ 1, первого н второгс влементов И 2 И 3, первого и второго счетчиков 4 н 5, элемента ИНЕ 6, триггера 7, причем первыи вход первого влемента И 2 с первым входом 9 устроиства входом тактовых импульсов. р третии входы 10...
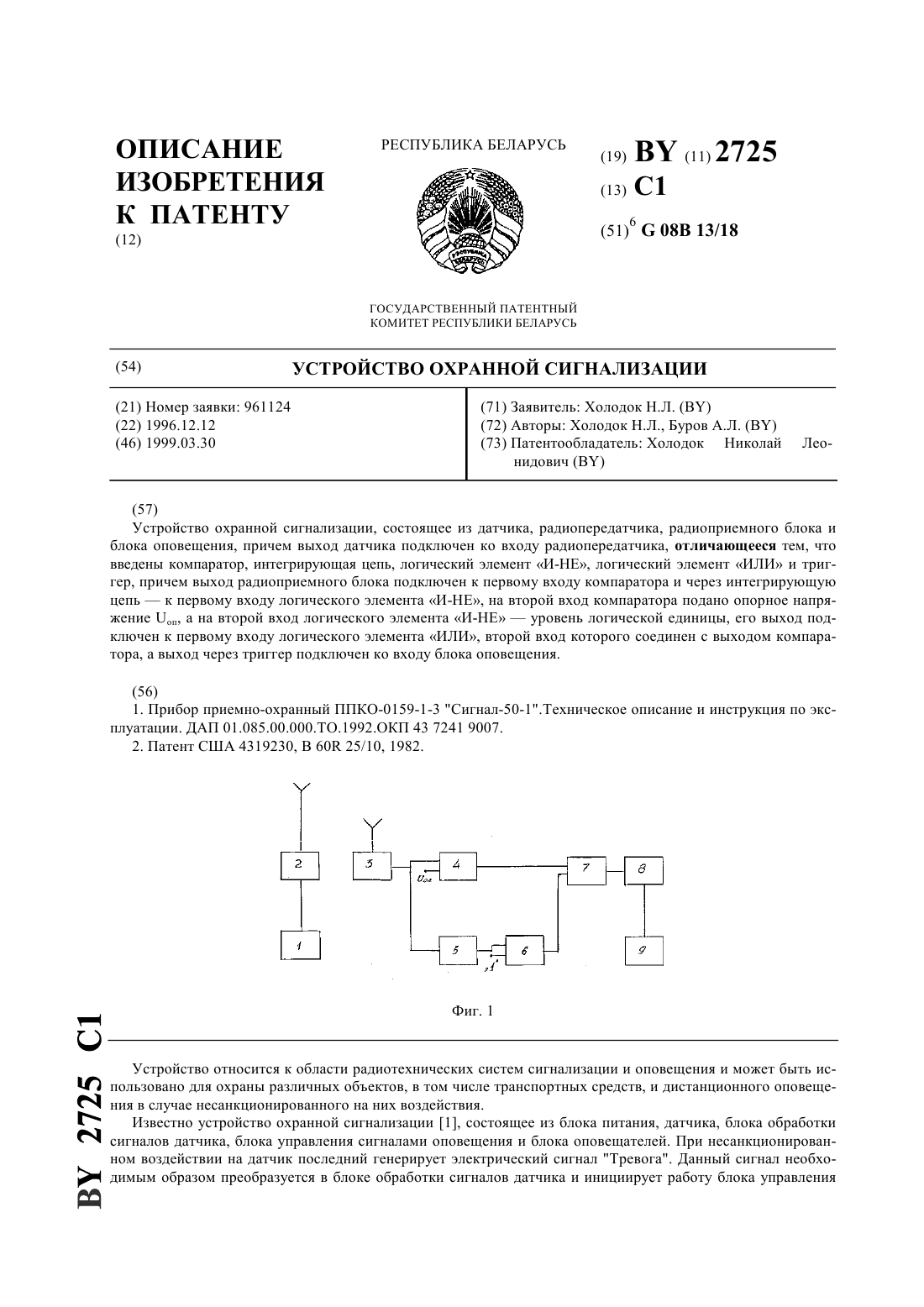
Устройство охранной сигнализации
Номер патента: 2725
Опубликовано: 30.03.1999
Авторы: Буров Андрей Леонидович, Холодок Николай Леонидович
МПК: G08B 13/18
Метки: устройство, сигнализации, охранной
Текст:
...радиопередатчика, а также при воздействии на радиоприемный блок несанкционированным имитационным радиосигналом Спокойно. Сущность изобретения поясняется на фиг.1, где 1 - датчик, 2 - радиопередатчик, 3 - радиоприемный блок,4 - компаратор, 5 - интегрирующая цепь, 6 - логический элемент И-НЕ, 7 - логический элемент ИЛИ, 8 триггер, 9 - блок оповещения, фиг. 2 поясняет работу устройства временными диаграммами. Устройство состоит из датчика...
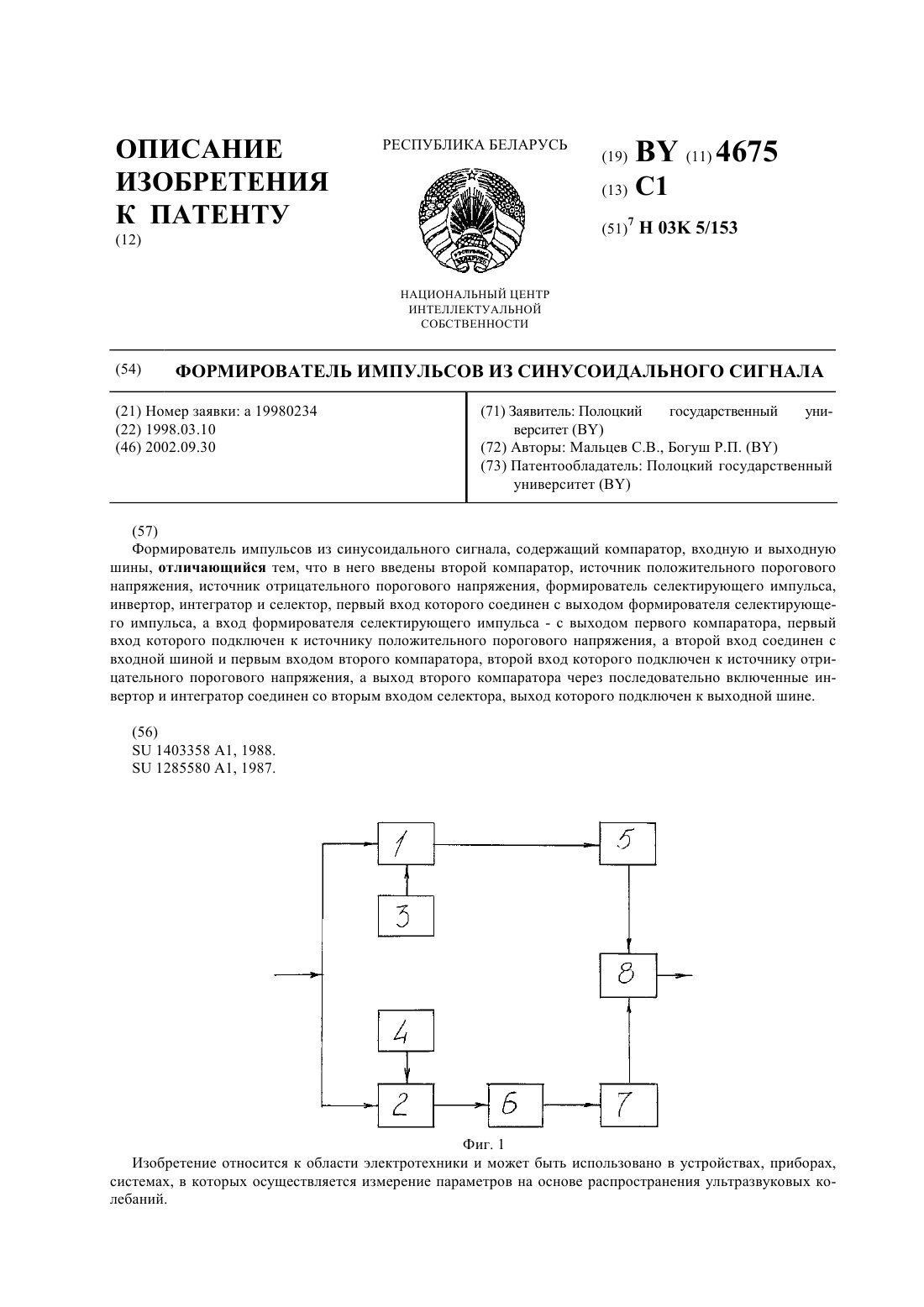
Формирователь импульсов из синусоидального сигнала
Номер патента: 4675
Опубликовано: 30.09.2002
Авторы: Мальцев Сергей Васильевич, Богуш Рихард Петрович
МПК: H03K 5/153
Метки: синусоидального, формирователь, импульсов, сигнала
Текст:
...- с выходом первого компаратора, первый вход которого подключен к источнику положительного порогового напряжения, а второй вход соединен со входной шиной и первым входом второго компаратора, второй вход которого подключен к источнику отрицательного порогового напряжения, а выход второго компаратора, через последовательно включенные инвертор и интегратор, соединен со вторым входом селектора, выход которого подключен к выходной шине....
Предыдущий патент: Приспособление для заточки и правки столярного инструмента
Следующий патент: Установка для испытания образцов материалов на трение
Случайный патент: Размалывающая система мельзавода